GPS基线解算精度分析
GPS基线向量解算及平差处理技巧

G P S基线向量解算及平差处理技巧-CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN基线向量解算及平差软件特点与问题一、基本方法:1、基线清理数据量大的时候,基线解算比较耗时。
GPS观测接收机数量较多时,会因为自然同步产生许多长基线,即许多相距较远的点连接而成的基线。
这些长基线往往同步观测时间不长,属于不必要的基线,对于控制网质量也无多大益处,所以为了节省计算时间,应在基线解算前将其清理删除。
删除时可在图上选择,也可以在基线表中根据距离选择删除。
2、处理超限闭合环基线解算完成后,首先要检查环闭合差(同步或异步环),对于闭合差大的环,应该进行处理。
一般按相对精度≤1/20000估算,相对闭合差应小于50ppm。
所以大于50 ppm的环应进行处理。
闭合环超限处理是一项繁琐、耗时的工作,也是GPS控制网数据处理的主要内容,主要的技巧和方法可以归纳为:(1)、超限基线处理过程中一些基线要重新解算,解算后会影响到相关环闭合差,所以处理需要反复进行。
作为一般的原则,首先处理相对闭合差较大的环,然后处理环闭合差较小的环。
(2)、整理归纳超限闭合环,分析是否涉及到一条共同基线,例如几组超限闭合环(J012,J015,J016)、(J013,J015,J102)、…,(J012,J020,J015)就涉及到共同基线J012→J015,这条基线有问题的可能性就较大。
(3)、处理时首先分析可能有问题的基线是否必要,如果是连接两个不相邻的点,并且涉及到环甚多,则可以直接将其删除。
井研算例网形复杂回路众多,一般可直接删除不合格基线。
(4)、如果一个闭合差超限的环,相关基线均不能简单删除(删除后影响图形结构,减少了重要环路),应该改变基线解算参数,重新计算相关基线。
方法是在网图上选中重解基线,重新设置高度角,历元间隔、参考星等设置,点击“基线解算”→“解算选择基线”。
(5)、基线解算的精度指标rms和ratio是基线解算质量的参考指标,前者是中误差,后者是方差比(,rms越小,表明基线解算质量越高,ratio越大,表明整周未知数解算越可靠,所以重解基线,要关注这两项指标,但是这两项指标只作参考,最重要的指标还是闭合差。
gps 基本原理及基线解算

城市GPS控制网施测质量控制措施探讨【摘要】本文作者在深入研究全球定位系统(GPS)静态定位原理的基础上,结合多年生产实践经验,就城市GPS控制网的布网原则、等级划分、作业方法及成果整理要求进行了探讨。
通过全面质量控制以确保城市GPS控制网测量成果符合现行测量规范的要求。
【关键词】GPS 基线向量约束平差全球定位系统(Global Positioning System,缩写GPS)是美国第二代卫星导航定位系统。
该系统以其全能性(陆地、海洋、航空和航天)、全球性、全天候、连续性和实时性的导航定位功能,已被广泛地应用于各种等级精度的城市控制测量中。
如何对城市GPS控制网施测进行有效的质量监控,将会直接影响到成果的测量精度。
为此,笔者结合多年的生产实践经验,就如何有效保证城市GPS控制网测量精度制定了一套质量控制措施,以供城市测量GPS用户参考。
一、技术标准※中华人民共和国国家标准《全球定位系统(GPS)测量规范》GB/T 18314-2001※中华人民共和国行业标准《全球定位系统城市测量技术规范》CJJ 73-97※中华人民共和国测绘行业标准《全球定位系统(GPS)测量型接收机检定规程》CH 8016-95※中华人民共和国测绘行业标准《测绘产品检查验收规定》CH 1002-95二、专业技术设计(一)等级划分根据《全球定位系统(GPS)测量规范》和《全球定位系统城市测量技术规程》中规定的城市各级GPS 控制网相邻点间平均距离,要求在城市GPS控制网布设时,其相邻点间平均距离应符合表1要求。
同时,允许相邻点的最小距离可为平均距离的1/3~1/2,最大距离可为平均距离的2~3倍。
考虑到南方地区丘陵、山地地形复杂,因此,在南方地区布设C级GPS控制网时,其平均边长限制可根据实际情况适当放宽到20~25公里,同时规定边长超过25公里的同步环应增测一个时段,以确保GPS测量数据的质量。
城市各级GPS控制网平均边长表1(单位:km)(二)精度设计根据GPS控制网相邻点间基线长度精度计算公式:式中:σ为标准差,单位mm;d为相邻点间距离,单位mm。
GPS/BDS组合系统静态基线解算的精度分析
GPS/BDS组合系统静态基线解算的精度分析作者:陈玉龙来源:《科技创新与生产力》 2017年第11期摘要:为了研究多系统导航定位技术,阐述了基线解算的原理、过程和质量控制等相关理论,通过实验采集了该研究的静态实验数据,比较了GPS系统、BDS系统及GPS/BDS组合系统的可见卫星数、PDOP值,并利用实验数据比较了这3种系统的定位精度,得出如下结论:GPS/BDS组合系统的可见卫星数明显增多,PDOP值也比单系统的低,说明GPS/BDS组合系统的定位精度更高;GPS/BDS组合系统比单系统的定位精度更高,系统更加稳定。
该研究对BDS系统今后的发展具有很大的帮助。
关键词:GPS/BDS组合;GPS;BDS;基线解算;可见卫星数;定位精度中图分类号:P228.4文献标志码:ADOI:10.3969/j.issn.1674-9146.2017.11.076北斗卫星导航系统[1](BeiDouNavigationSatelliteSystem,BDS)简称北斗系统,是由中国自主研究、组建、独立运行并与世界其他主要的卫星导航系统兼容的一个卫星导航系统,能在全球范围内向各类用户提供全天候、全天时的导航、定位、授时服务及短报文通信功能。
随着全球卫星导航系统(GlobalNavigationSatelliteSystem,GNSS)的发展,多系统导航定位技术已成为当今研究热点之一。
目前,全球定位系统(GlobalPositioningSystem,GPS)的相对定位已得到广泛应用,随着北斗系统的完善,GPS/BDS组合系统的相对定位成为可能。
BDS系统与GPS系统有许多相似之处,研究GPS/BDS组合系统对BDS系统今后的发展具有很大的帮助。
1基线解算的相关理论1.1基线解算的原理基线向量[2]是通过同步观测数据的差分解算得到的,用基线边长和三维相对坐标表示,见图1。
基线向量通常用站心坐标表示为b=[ΔNΔEΔU]T。
GPS基线解算的方法及精度分析【正文+开题报告+任务书】
目录摘要 (1)1GPS基线解算方法 (1)1.1GPS 定位及基线解算原理 (2)1.2GPS 基线解算的重要影响因素及解决方案 (2)2GPS控制网基线解算的一般原则和质量分析方法 (4)2.1 GPS控制基本作业流程在大地测量和工程控制测量 (5)2.2 通过基线解算结果来分析GPS野外数据的观测质量 (5)2.3 基线解算的一般原则 (6)2.4 GPS网的三维无约束平差的主要作用 (6)2.5 基线解算质量分析 (7)2.5.1 基线向量的改正数 (7)2.5.2 数据删除率 (7)2.5.3 RDOP (7)2.5.4 同步环闭合差 (7)2.5.5 异步环闭合差 (8)2.5.6 重复基线较差 (8)2.5.7 小结 (8)3GPS控制网基线解算优化方法探讨 (8)3.1 观测数据及基线解算质量评定要素 (8)3.2 优化基线解算精度技术方法 (9)3.2.1 提高起算点坐标精度 (9)3.2.2 删除或优化卫星组合 (9)3.2.3 调整卫星截止高度角等控制参数 (10)3.2.4 截取观测时段 (11)3.3小结 (11)4GPS双差解的RATlO定义及作用 (11)4.1初始整周未知数偏差搜索及ratio的定义 (12)4.2小结 (12)5GPS 基线解算的精度分析 (12)5.1精度分析 (12)5.2小结 (13)6总结 (13)参考文献 (14)Abstract (1)GPS基线解算的方法及精度分析摘要:对GPS控制网基线处理中对观测数据及基线解算质量评定要素进行了总结,针对控制网内业数据处理基线解算中经常出现的一些问题,总结出优化解算的原则和方法,并提出合理建议。
关键词:GPS;基线解算;优化;精度分析Method and precision analysis of GPS baseline solutionAbstract:Of baseline processing in GPS control network of observation data and baseline decoding quality evaluation factors are summarized, in view of the GPS control network data processing base in the industry often appear some problems in calculating, sums up the principles and methods of optimization algorithm,and put forward reasonable Suggestions.Key words:GPS;Baseline solution;optimization;Precision analysis1 GPS 基线解算方法GPS 测量数据的处理可分为基线解算和网平差两个阶段,因为GPS 测量得到的是 GPS 相位中心到卫星发射中心的伪距,载波相位和卫星星等,使得要得到工程测量的定位成果,必须先进行基线向量解算,评定基线精度,它是GPS 数据处理的重要环节,其解算质量的好坏将直接影响到GPS 网的定位精度。
影响GPS基线解算结果的因素分析及应对措施
国土资源(2008年增刊1)134文★大连鹏程工程勘测设计有限公司 熊启生中国人民解放军65015部队 张坤鹏 王智超PS静态定位在测量中主要用于测定各种用途的控制点。
其中较为常见的方面是利用GPS建立各种类型和等级的控制网,在这些方面GPS技术已基本上取代了常规的测量方法,成为了主要手段。
较之于常规方法,GPS在布设控制网方面具有测量精度高;选点灵活、不需要造标、费用低;全天侯作业;观测时间短;操作简便等优点。
基线解算是GPS网观测数据处理过程的重要环节,基线解算质量的好坏直接关系到各条基线的观测精度,从而影响整个控制网的精度。
因此基线解算质量控制以及基线解算过程中数据的处理方法是整个控制网数据处理的关键点。
本文结合GPS定位原理和实际经验,在南方GPS静态处理软件中对于GPS基线解算阶段需要解决的一些关键问题进行论述。
影响GPS基线解算结果的因素影响GPS基线解算结果因素的判别1.基线解算时所设定的起点坐标不准确。
起点坐标不准确,会导致基线出现尺度和方向上的偏差。
2.少数卫星的观测时间太短,导致这些卫星的整周未知数无法准确确定。
当卫星的观测时间太短时,会导致与该颗卫星有关的整周未知数无法准确确定,而对于基线解算来讲,参与计算的卫星,如果与其相关的整周未知数没有准确确定的话,就将影响该条基线解算的精度。
3.在整个观测时段里,有个别时间段里周跳太多,致使周跳修复不完善。
4.在观测时段内,多路径效应比较严重,观测值的改正数普遍较大。
5.多路径效应严重、对流层或电离层折射影响过大。
1.基线起点坐标不准确的判别。
对于由起点坐标不准确所对基线解算质量造成的影响,目前还没有较容易的方法来加以判别,因此,在实际工作中,只有尽量提高起点坐标的准确度,以避免这种情况的发生。
2.卫星观测时间短的判别。
关于卫星观测时间太短这类问题的判断比较简单,只要查看观测数据的记录文件中有关对与每个卫星的观测数据的数量就可以了,南方静态数据处理软件还输出卫星的可见性图(如图1),这就更直观了。
GPS测量基线解算质量研究

GPS测量基线解算质量研究文/ 胡国刚G PS基线处理是整个GPS数据处理的重要环节。
如何研究和掌握一套高精度GPS基线处理的模型和方法,是测绘部门共同面临的重要课题,阐述了高精度GPS网基线处理的模型和方法,对GPS基线处理过程中的参考框架确定、星历选择、基准站确定,约束条件,起算坐标以及模型参数的关键问题进行了分析,并结合实例进行了数据处理和结果分析。
数据删除率在基线解算时,如果观测值的改正数大于某一个阈值时,则认为该观测值含有粗差,需要将其删除。
被删除观测值的数量与观测值的总数的比值,就是所谓的数据删除率。
该值越大表明原始观测数据的质量越差。
因此在GP S测量规范中一般规定该值应小于10%。
观测值的 R M S 即均方根误差(Root Mean Square),即:GPS相对定位观测G PS定位模式按不同的分类法有动态定位、静态定位之分;有单点定位、相对定位之分;有伪距模式和载波模式之分。
而高精度GPS控制网都是采取静态相对定位的模式,采用载波相位观测量。
载波相位观测方程为:不同。
影响 GPS定位及基线处理精度的因素有很多,如卫星星历、对流层折射、电离层折射、多路径效应、基准站坐标、基线解时采用的软件、解算数学模型等。
在高精度GPS网基线处理时,要考虑的几个关键问题是参考框架确定与星历的选择、基准站起算坐标与约束条件、模型与参数选择等。
其中,V为观测值的残差;P为观测值的权;n为观测值的总数。
RMS反映了观测值与参数估值间的符合程度,也在一定程度上反映了观测值的质量,观测值质量越好,RMS越小。
比率RA TIO式中:Φ为以 m 为单位的测量完整的载波相位观测值;λ为以m为单位的波长;N为整周模糊度,εΦ为接收机载波相位观测的噪声和多路径效应 (εmut)的影响。
为了减少上面载波相位观测方程的定位误差,可以构造差分观测模型,来消除或降低各种误差的影响。
随着距离的增加,差分误差的残差也将增加。
GPS基线解算的质量分析与研究
GPS基线解算的质量分析与研究GPS数据处理是研究GPS定位技术的一个重要内容,而解算基线是GPS控制网观测数据处理过程的重要环节。
本文结合GPS相对定位原理以及GPS数据处理软件中基线解算的基本过程,采用两个工程的实测数据分别研究了网型的布设方式、起算点位置的选择、观测卫星的选择对基线解算质量的影响。
通过对实验后的数据分析,得出了对基线解算精度的影响规律,同时总结了提高基线解算质量的具体方法。
标签:GPS基线解算;网型布设方式;观测卫星;引言全球定位系统(Global Positioning System-GPS)作为新一代的卫星导航定位系统,现已发展成为一种被广泛使用的系统。
目前,我国已采用GPS技术布设了新的国家大地测量控制网,绝大多数城市也都采用GPS技术建立了城市控制网。
GPS数据处理原理比较复杂,但自动化程度高。
GPS的定位精度一般与网的布设、已知点的选取、观测方法、基线处理和网平差有关,而基线处理是GPS数据处理的最重要的一步[1]。
本文结合GPS定位原理及基线解算模型,从如何提高GPS基线解算出发,结合具体工程项目进行基线解算,通过对基线解算成果进行质量分析, 研究网型布设方式、起算点位置的选择、观测卫星的选择对基线解算质量的影响。
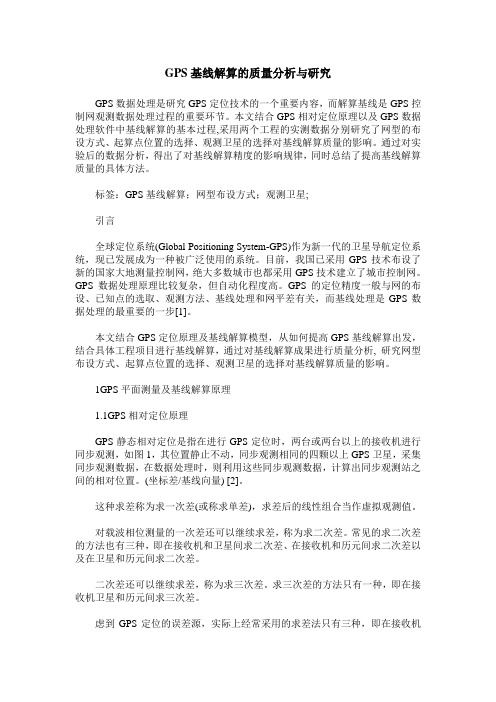
1GPS平面测量及基线解算原理1.1GPS相对定位原理GPS静态相对定位是指在进行GPS定位时,两台或两台以上的接收机进行同步观测,如图1,其位置静止不动,同步观测相同的四颗以上GPS卫星,采集同步观测数据,在数据处理时,则利用这些同步观测数据,计算出同步观测站之间的相对位置。
(坐标差/基线向量) [2]。
这种求差称为求一次差(或称求单差),求差后的线性组合当作虚拟观测值。
对载波相位测量的一次差还可以继续求差,称为求二次差。
常见的求二次差的方法也有三种,即在接收机和卫星间求二次差、在接收机和历元间求二次差以及在卫星和历元间求二次差。
二次差还可以继续求差,称为求三次差。
提高GP S长基线解算精度的探讨

Research on Improving the Precision of Solving GPS Long Base-lineI. INTRODUCTIONwith the foundation of GPS continuous operational tracking stations, the GPS application areas is expanded and the request of GPS positioning precision is higher and higher. As the far spacing between GPS tracking stations, it will be the scholars’ discussed hot to improve GPS long base-line calculation. However, the distance-related error is increased when the distance between GPS reference station and GPS rover station increases, it includes: satellite orbit error、lonospheric delay error、tropospheric delay error and so on. The satellite orbit error can be weakened by using the final ephemeris of the IGS post-treatment; the lonospheric delay errors can be weakened through the combined observations of dual-frequency GPS receiver. However, the tropospheric delay errors is hard to avoid by using the troposphere model. It is because that they vary greatly in space and time. In this paper, weakening tropospheric delay is focus on to improvethe precision of solving GPS long base-line.II. THE PRINCIPLE OF CALCULA TING ZTD BY USINGINTERPOLA TIONTropospheric delay is composed of dry delay (namely as Zenith Hydrocratic delay(ZHD)) delayand wet delay, dry delay can be estimated accurately by surface air pressure. As a result of the impact of water vapor in the air, wet delay is difficult to estimate accurately. Tropospheric delay mainly concentrated in the zenith direction, so accurate determination of zenith tropospheric delay(ZTD) is discussed in this paper. Total ZTD calculated by the high-precision calculation of the software GAMIT is the every 30 minutes estimated result on the network data of Europeanpermanent reference station, the error of ZTD estimated by troposphere model can be up to 5cm. It has great impact on the outcome of long base-line solution. The accuracy of Tropospheric delay announced by the IGS products is 4mm. In this paper, the precision of solving ZTD by using ordinary kriging (kriging) interpolation method can be improved up to 0.2mm.Ordinary Kriging (OK) interpolation is a geostatistical method that assumes that there is some spatial correlation between points. It assumes that the distance between sample points reflects a spatial correlation that can be used to explain variations in the surface. In OK, it is assumed that as the distance between points increases the correlation between the points decreases. Kriging fits a mathematical model to a specified number of points in order to determine the output value. It is a best linear unbiased estimator. A linear variogram model was used for the interpolation. The model used was forced to pass at 0 and have a sill of 1. This is expressed in equation(1). The value a is used to set the distance at which the correlation between points vanishes.where dij is the Euclidean distance between two points:a is the distance at which correlation vanishes.It can be used with measured values to calculate a variogram matrix (3) below:Equation (4) is also used with the query point (x0,y0) to produce vector g. In this case the distance used is between the query point and sample points.The 1’s and 0’s in the above matrices are to satisfy one of ordinary kriging’s objectives of producing an unbiased estimate. This is achieved by setting the sum of the weights(wi) to equal 1. The two matrices above are then used to get the weights of the sample points.The Zenith wet delay (ZWD) at the query location is then calculated using equation (6).We can get high-precision total zenith delay (ZTD) by above-mentioned ZWD and ZTD of this point, specific calculation steps shown in Figure 1. Through samples we can provide a theoretical basis that using Kriging interpolation method can improve the accuracy of GPS long base-line position and solution of atmospheric water vapor content in the future.III. EXAMPLES AND ANALYSISA. Experimental overviewThe experiment used two trimble 4700 double frequency receivers. One receiver was setup at China University of Geosciences (CUG1) and the other at a small town 74 km from Wuhan, Huangshi (ED08). The data was collected from 10:00 hrs to 16:00 hrs local time. The data was processed together with the IGS station WUHN also situated in Wuhan with coordinates tightly constrained so that station errors are reduced. Two baselines were used for this study, WUHN-CUG1 and WUHN-EDO8 which have distances of 3.6 km and 70.5 km respectively. The data were solved combined with data gathered from IGS tracking station around this area(Specific location see Figure 2) and precise ephemeris, relevant meteorological data to calculate ZTD by using GAMIT10.2 according to the principle of OK interpolation. The data is used here to show the impact of tropospheric delay on the baseline length. The example confirmed that OK interpolation method is reliable to improve the precision of solving the long base-line.B. Solving results and analysisAccording to the principle of above-mentioned interpolation model , the ZTD over two GPS stations which are at Interpolation points CUG1 and ED08 were solved by self-compiled program. The solving results were compared with the results solved by GAMIT software directly with no interpolation model which is saastamoinen model. Solving results of ZTD over CUG1 and ED08 show in Table 1. Solving results on WUHN – CUG1 and WUHN – ED08 baselineshow in Table 2.As can be seen from Table 1: due to the uncertainty of zenith wet delay, the accuracy is affected by using classic Saastamoinen wet delay model. However, the precision of the zenith wet delay of interpolation site can be improved by using interpolation model of OK, thus the accuracy of ZTD can be improved at the same time. If the ZTD solved by GAMIT software were looked as the true values, the deviation of the ZTD by using interpolation model are much smaller than that by using classical Saastamoinen model. It shows that using above interpolation model can improve the precision of solving ZTD.As can be seen from Table 2: the standard deviation of baseline solution by using interpolation model is smaller than that by using classical Saastamoinen model. It shows that the precision of the baseline solution using the interpolation model is improved. The improvement of the solving result of the longer baseline such as WUHN-ED08 is obvious.IV. CONCLUSIONThrough a preliminary study on GPS long baseline solution, the conclusion can be drawn that using OK interpolation method to get the high-precision ZTD can provide reference for improving the precision of solving GPS long baseline and GPS positioning. Due to the limited experimental conditions, useful conclusions in this article need to be improved and perfected.提高GP S长基线解算精度的探讨1 引言随着GPS(Global Positioning System)连续运行跟踪站的不断建立,GPS应用领域也不断拓展,对GPS定位精度的要求也越来越高,由于GPS跟踪站间相距较远,对于提高GPS 长基线解算精度将成为学者们探讨的热点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
GPS基线解算精度分析
摘要:本文主要通过是建立在实验的上分析影响不同长度基线解算精度的因素。
在熟悉TGO这款软件的同时进行实验分析影响基线解算精度的因素,进而掌握GPS基线解算是的一些简单技巧。
关键词:基线TGO精度RMS
作者简介:黄纪晨(1985-),男,硕士研究生,毕业于河海大学,先在新疆维吾尔自治区交通规划勘察设计研究院任职,主要从事星导航与定位和精密工程测量等方面的研究工作
GPS定位技术在测量中的应用日益深入广泛,随着该技术的不断发展,对GPS测量精度的要求越来越高。
对于GPS控制网而言,提高基线解算精度是提
高GPS网点精度的基础。
本文使用Trimble提供的TGO进行解算,对不同长度基线的解算精度做简单的对比介绍。
根据TGO的特点主要从卫星高度角设置、对流层模型选择、电离层改正进行实验对比。
本文所采用的数据是来自三个不同的控制网的具有典型长度的基线,同样选择了Trimble 5700接收机所测数据。
选择的基线长度不同的六条基线,为了对比方便设置基准为:
Bern是高精度的基线解算软件,其的解算结果作为参考假设为真值,实验数据以对比RMS为主,同时注意水平精度和垂直精度,以及ΔL,ΔL是TGO 的基线解算结果和Bern解算结果之差的绝对值。
1、卫星高度角的设置
增加卫星高度角是为了剔除一些观测质量不佳的数据,比如高大建筑物遮挡造成的不佳。
从信号质量来讲,增加高度角都会剔除一些质量不佳的数据。
实验分为Trimble默认的13和30度数下的解算精度进行对比。
其中使用L1频率固定解算,对流层改正模型使用Saastamoine模型,电离层设置为对于10Km 以上的基线加入电离层改正。
表1 高度角设置为13度时的解算结果
表2 高度角设置为15度时的解算结果
对比表1和表2发现,除B6基线外,其余5条基线水平精度、垂直精度值和ΔL有不同程度的降。
B6基线由于观察时间长,ΔL的值在不断减小,说明基线解算结果越来越接近真值。
从实验对比数据中来看总体上来说,结论是当高度角相应提高时,观测时间较短的基线增加高度角,参与解算的卫星个数减少以及参与解算的卫星观测数据减少时卫星精度都相应降低。
观察时间较长的时候,在数据条件允许的情况下增加卫星高度角的设置有助于相应的提高基线解算的精度。
2、对流层改正模型的选择
这里对于对流层改正模型不在加以赘述。
TGO的默认基线解算处理已经加入了双差改正,已经可以消除大部分的对流层延迟。
表3 无对流层改正的解算结果
表4 采用对流层改正模型的解算结果
表3中RMS值和ΔL的值明显较大,而且随着基线长度的增加越来越大,说明在长基线的解算中,TGO默认加入的双差改正已经不足以消除对流层影响。
因此在长基线的解算中必须加入对流层改正模型。
表4数据可以发现加入对流层改正后的基线解算精度有了明显的提高。
当基线长度增加是,基线两端点的距离就远了,此时两端点的气象条件是不一样的,因此双差改正已经无法大幅度的消除对流层的影响。
3、电离层改正的应用
在TGO的基线解算模型中,默认的是给10Km以上的基线加入电离层改正模型。
由此判断在长基线的解算中,电离层改正是必要的,本小节就是对比加入电离层改正前后的基线解算精度。
表5 无电离层改正的解算精度
从上表中可以明显看出在大于10Km的基线解算后RMS、水平精度和垂直精度数值提高,使得精度降低根本就没有通过解算时TGO的精度限制。
ΔL的值也明显过大。
但5Km的基线没有任何影响,因为在默认情况下这个解算结果也是没有加入电离层改正的。
表6 加入电离层改正的解算精度
在对全部GPS基线加入电离层改正的时候,长基线的解算的精度都恢复了正常,唯有B1基线的解算精度反而降低了。
这次关于电离层改正的实验数据的差别比较明显,结论也是显然的:对于大于10Km的长基线解算是必须要加入电离层改正,否则无法保证精度。
同时观察可以不加入电离层改正时的基线越长精度越低,因为这是双差改正对于消除电离层影响是不够的,这也说明电离层改正对长基线解算的重要性。
但是对于短基线B1,加入电离层模型反而使精度降低,这也符合TGO默认将电离层改正加入的限制设置在10Km,分析原因,可能有以下两个原因:
①TGO默认基线解算处理已经加入了双差改正,在短基线的解算中双差改正已经可以消除电离层的对解算精度的影响,加入电离层改正模型后反而使基线解算精度降低。
②B1基线中的1号点的观测之间只有20分钟,数据的质量较差,以此电离层改正加入后使得其数据的质量更差,降低了基线解算精度。
综上所述,在经过双差改正后,短基线的解算中不需要加入电离层改正,而长基线(大于等于10Km)的解算必须加入电离层改正。
在GPS基线的解算中,影响精度的因素包括外业测量的质量和内业数据的处理方式,外业的测量影响是没有办法改变的,所以应该在内业处理上掌握提高
解算精度的方法。
TGO作为Trimble接收机的随机软件在工程中被广泛使用,其最强大的功能在于Timeline的操作,本次实验由于时间有限对这方面没有深入研究。
本次实验仅对TGO中最简单的功能进行实验,旨在初步探讨各种数据处理方式对基线解算精度的影响,更深入的分析有待于对TGO的进一步研究。
参考文献
[1] 刘大杰,施一民,过静珺编著.全球定位系统(GPS)的原理和数据处理.[M].1996
[2] 黄劲松,李征航编著.GPS测量与数据处理,[M].武汉大学出版社.2005
[3] 黄劲松,魏二虎编著.GPS测量操作与数据处理.[M].武汉大学出版社.2004
[4] 张红斌.GPS基线处理应注意的几个问题.[J].物探装备.2003
[5] 黄声享.提高GPS基线质量的某些因素.[J].工程勘察.1995
注:文章内所有公式及图表请以PDF形式查看。