一种双目立体视觉相机标定方法
双目相机 测量 物体 长宽高信息 方法

双目相机测量物体长宽高信息方法双目相机测量物体长宽高信息的方法是一种常用的计算机视觉技术,可以实现对三维物体的精确测量。
下面将介绍双目相机测量物体长宽高信息的原理、步骤和应用。
1.双目相机测量原理双目相机是指由两个摄像头组成的成像系统,模拟了人眼的视觉感知机制。
通过左右眼看到的不同视角,可以获取到三维物体的深度信息。
利用双目视觉测量方法,可以计算出物体的长、宽和高等几何尺寸。
2.双目相机测量步骤(1)相机标定:在进行测量之前,需要先对双目相机进行标定。
相机标定是通过拍摄一组已知尺寸的校准板图像,利用相机内参和外参的确定来建立相机的坐标系和世界坐标系之间的关系。
(2)图像获取:在标定完成后,需要拍摄待测物体的左右视角图像。
通过两个摄像头同时拍摄同一物体的不同视角,形成左右图像对。
(3)图像匹配:采用特征点匹配的算法,对左右图像进行匹配,找出对应的特征点。
常用的特征点匹配算法有SIFT、SURF等。
(4)三维重建:通过匹配得到的特征点对,可以计算出左右图像之间的对应关系,进而确定物体在三维空间中的位置。
根据三角测量原理和相机标定参数,可以得到每个特征点的三维坐标。
(5)尺寸测量:在得到物体的三维坐标后,可以通过计算两个特征点之间的距离,来确定物体的长、宽和高等尺寸信息。
3.双目相机测量应用双目相机测量方法可以广泛应用于工业领域和机器人领域:(1)3D视觉检测:双目相机能够提供高精度的三维尺寸数据,可以在无人机、智能手机、电视等产品的生产过程中进行3D视觉检测,实现自动化检测目标的尺寸精度,提高生产效率。
(2)物流仓储:双目相机可以用于快速测量物体尺寸,可以应用于物流仓储行业中的自动分类、计量等环节,提高物流效率。
(3)机器人导航:双目相机可以提供环境的三维深度信息,可以用于机器人的自主导航和障碍物避障,提高机器人的智能化程度和安全性。
总结:双目相机测量物体长宽高信息的方法通过利用左右视觉图像的深度差异,以及相机标定提供的几何参数,可以实现对物体的精确测量。
双目立体相机自标定方案的研究
双目立体相机自标定方案的研究一、双目立体相机自标定原理双目视觉是通过两个摄像机从不同的角度拍摄同一物体,根据两幅图像重构出物体。
双目立体视觉技术首先根据已知信息计算出世界坐标系和图像坐标系的转换关系,即世界坐标系和图像坐标系的透视投影矩阵,将两幅图像上对应空间同一点的像点匹配起来,建立对应点的世界坐标和图像坐标的转换关系方程,通过求解方程的最小二乘解获取空间点的世界坐标系,实现二维图像到三维图像的重构。
重构的关键问题是找出世界坐标系和图像坐标系的转换关系--透视投影矩阵。
透视投影矩阵包含了图像坐标系和相机坐标系的转换关系,即相机的内参(主要是相机在两坐标轴上的焦距和相机的倾斜角度),以及相机坐标系和世界坐标系的转换关系,即相机的外参(主要是相机坐标系和世界坐标系的平移、旋转量)。
相机标定的过程就是确定相机内参和相机外参的过程。
相机自标定是指不需要标定块,仅仅通过图象点之间的对应关系对相机进行标定的过程。
相机自标定技术不需要计算出相机的每一项参数,但需要求出这些参数联系后生成的矩阵。
二、怎样提高摄像机自标定精确度?方法一、.提高估算基本矩阵F传统的相机自标定采用的是kruppa方程,一组图像可以得到两个kruppa方程,在已知3对图像的条件下,就可以算出所有的内参数。
在实际应用中,由于求极点具有不稳定性,所以采取基本矩阵F分解的方法来计算。
通过矩阵的分解求出两相机的投射投影矩阵,进而实现三维重构。
由于在获取图像过程中存在摄像头的畸变,环境干扰等因素,对图像会造成非线性变化,采用最初提出的线性模型计算 f 会产生误差。
非线性的基本矩阵估计方法得到提出。
近年来非线性矩阵的新发展是通过概率模型降低噪声以提高估算基本矩阵的精度。
方法二、分层逐步标定法。
该方法首先对图像做射影重建,再通过绝对二次曲线施加约束,定出仿射参数和摄像机参数。
由于它较其他方法具有较好的鲁棒性,所以能提高自标定的精度。
方法三、利用多幅图像之间的直线对应关系的标定法。
机器人手眼标定技术中双目相机的实现方案

机器人手眼标定技术中双目相机的实现方案机器人手眼标定技术中双目相机的实现方案双目相机是机器人视觉系统中重要的技术之一,能够模拟人类双眼视觉,实现深度感知和环境感知。
它主要通过利用两个摄像头同时拍摄同一场景,通过计算两个摄像头之间的视差,来推断物体的距离和位置信息。
下面将按照步骤来介绍双目相机的实现方案。
第一步:相机选择在开始实施双目相机的项目之前,我们需要选择合适的相机作为基础设备。
首先,需要选择两个相机模组,这两个相机模组应具备高分辨率、高帧率和高灵敏度等特性,以确保获取清晰的图像。
其次,需要选择可以与相机模组无缝配合的硬件平台,例如嵌入式系统或者计算机。
第二步:相机标定相机标定是双目相机的重要环节,它确定了两个摄像头之间的内外参数,以及相机与机器人坐标系之间的变换关系。
为了完成相机标定,需要使用一个标定板,该标定板上印有一系列具有已知几何关系的特征点。
在拍摄标定板时,需要保证两个相机的视野都能够同时看到标定板,并且标定板在不同位置和姿态下都能够被拍摄到。
通过对拍摄到的图像进行处理和计算,可以得到相机的内外参数,并实现相机与机器人坐标系之间的标定。
第三步:图像采集与预处理在双目相机中,两个相机同时获取图像,并将图像传输到计算机或者嵌入式系统进行处理。
在图像采集之前,需要对相机进行初始化和配置,包括设置图像分辨率、帧率和曝光时间等参数,以及进行图像校正和畸变矫正。
在图像预处理中,可以对图像进行去噪、滤波、直方图均衡化等操作,以提高图像质量和辨识度。
第四步:视差计算与深度感知通过对两个相机拍摄到的图像进行匹配,可以得到左右两个相机之间的视差。
视差是指同一物体在两个相机图像中的特征点之间的水平位移量。
通过对视差进行计算和分析,可以推断物体的距离和位置信息。
在视差计算中,常用的算法包括基于区域的匹配算法、基于特征点的匹配算法和基于深度学习的匹配算法等。
第五步:三维重建与环境感知通过对左右两个相机之间的视差信息进行处理和分析,可以得到场景中物体的三维形状和结构。
双目视觉 标定流程
双目视觉的标定流程主要包括以下几个步骤:
1. 准备标定板:选择一个具有明显特征的标定板,如具有方格或圆点的图案。
确保标定板的表面平坦且坚固,以便能够准确地检测其特征。
2. 拍摄标定图像:使用双目视觉系统拍摄标定板的图像。
确保从不同的角度和位置拍摄多张标定图像,以便能够充分覆盖视场范围。
3. 特征检测:对拍摄的每张标定图像进行特征检测,提取出标定板上的特征点。
这可以通过使用计算机视觉算法实现,例如使用SIFT、SURF或ORB等算法。
4. 相机参数设定:在双目视觉系统中设定相机的参数,包括内参和外参。
内参包括焦距、主点坐标等,外参包括旋转矩阵和平移向量等。
这些参数可以根据标定结果进行优化和调整。
5. 标定数据计算:根据拍摄的标定图像和特征点信息,计算出相机的内外参数以及畸变系数。
这一步通常涉及到复杂的数学计算和优化过程。
6. 验证标定结果:为了确保标定结果的准确性,可以使用一些验证方法。
例如,可以重新拍摄标定板并检测特征点,然后比较新旧标定结果的一致性。
此外,还可以使用一些评估指标,如重投影误差等来评估标定效果。
7. 调整参数:根据验证结果,如果标定效果不理想,可能需要
重新调整相机参数或重新拍摄标定图像,并重复上述步骤。
通过以上步骤,可以完成双目视觉系统的标定过程,为后续的立体匹配、三维重建等应用提供准确的相机参数和畸变校正。
红外双目相机标定方法的研究和实现
problem that some wrong corners and pseudo-corners detected by current corner detection
feature of the edge area of lens, this paper proposes an infrared corner detection algorithm based
on homography matrix, which can effectively extract the feature of edge area and make the
The contributions in corner detection are as follows: (1) Aiming at the problems of poor
imaging contrast, complex structure, cumbersome operation, low calibration accuracy and other
The contributions in camera calibration are as follows: (1) Aiming at the problem that the
corresponding points of left and right images still cannot meet the parallel equivalence
algorithms under complex imaging conditions and the problem that unsuitable size of the
双目相机标定python
双目相机标定python双目相机标定在计算机视觉领域中扮演着重要的角色。
它是一种用于确定双目相机内外参数的技术,以便将图像中的像素坐标映射到真实世界中的三维坐标。
本文将介绍如何使用Python进行双目相机标定。
我们需要明确双目相机标定的目的。
双目相机标定的主要目标是确定相机的内部参数,例如焦距、主点和镜头畸变等。
同时,还需要确定相机的外部参数,例如相机之间的旋转和平移矩阵。
这些参数对于后续的三维重建和视觉测量非常重要。
在进行双目相机标定之前,我们需要准备一些标定板。
标定板是一种特殊的平面结构,上面有一些已知尺寸的特征点。
我们需要将标定板放置在不同的位置和角度,并拍摄一系列的图像。
接下来,我们可以使用Python中的OpenCV库来进行双目相机标定。
首先,我们需要加载图像。
然后,我们可以使用OpenCV中的函数来检测标定板上的特征点。
一旦我们检测到足够数量的特征点,我们就可以使用这些特征点来计算相机的内部和外部参数。
在计算相机参数之前,我们需要对图像进行一些预处理。
例如,我们可以使用直方图均衡化来增强图像的对比度。
然后,我们可以使用亚像素级的特征点检测算法来提高特征点的准确性。
接下来,我们可以使用OpenCV中的函数来计算相机的内部和外部参数。
这些参数将存储在相机矩阵和畸变系数中。
相机矩阵包含了相机的焦距、主点和像素间距等信息。
畸变系数用于修正镜头畸变。
完成相机参数的计算后,我们可以使用这些参数来进行图像的校正。
校正后的图像将更准确地反映真实世界的几何形状。
我们可以评估标定的准确性。
我们可以使用重投影误差来评估标定的精度。
重投影误差是指将三维点重新投影到图像平面上的像素坐标与实际检测到的像素坐标之间的差异。
较小的重投影误差表示标定的准确性较高。
通过使用Python进行双目相机标定,我们可以准确地确定相机的内部和外部参数,从而为后续的视觉任务提供基础。
这种技术在三维重建、立体视觉和机器人导航等领域中具有广泛的应用前景。
一种双目立体视觉相机标定方法
内的 比例 及 正 交 畸 变 , 如 果 采 用 的 内 方 位 元 素 但
( ,。 存 在 误差 , 从 数 学 上 来 说 也 会 干 扰 共 。Y , 则
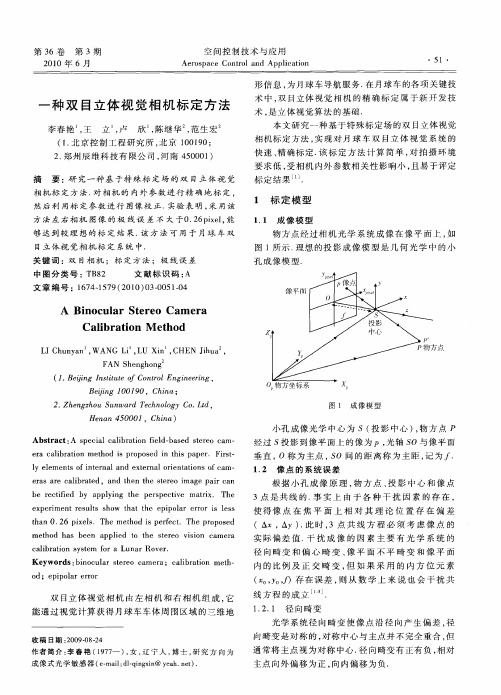
双 目立 体 视觉 相 机 由左 相 机 和 右 相 机 组 成 , 它 能通 过视觉 计 算获 得 月球 车车 体周 围区域 的三 维地
物方 点经 过相 机 光 学 系 统 成 像 在像 平 面上 , 如 图 1所示 . 理想 的投 影成 像 模 型是 几 何 光 学 中 的小
孔 成像 模 型.
文 章 编 号 :17 —5 9 2 1 ) 30 5 —4 6 4 17 ( 0 0 0 —0 10
A no u a e e m e a Bi c l r St r o Ca r Ca i a i n M e ho l br to t d
LICh n a , ANG , n CHEN iua uyn W Li LU Xi , Jh ,
F AN h n h n S e go g
( . n n tueo C nrlE gn eig, J 曰e g I si t f o to n ier t n
K 、 为径 向畸变 系数. : 12 2 偏心 畸变 ..
+ ,
+…
f = X +i △ △r x Zm Zd x
【 =a , d i △ y +5 +Z y y
李 春 艳 王 , 立 卢 , 欣 陈 继 华 范 生 宏 , ,
术 中 , 目立体 视觉 相 机 的精 确 标 定 属 于新 开 发 技 双
术, 是立 体视 觉算 法 的基 础 .
~ 一~ ‰一 ~ 一 ~ 一 _ 蓦 一 ~
本 文研 究一 种基 于特 殊标 定场 的双 目立 体视 觉 相 机标 定方 法 , 现对 月 球 车 双 目立 体 视 觉 系 统 的 实 快 速 、 确标 定 . 标 定方 法 计 算 简 单 , 拍 摄 环 境 精 该 对 要求 低 , 受相 机 内外 参数 相关 性影 响小 , 且易 于评 定
opencv双目标定
opencv双目标定双目相机是指一种拥有两个摄像头的相机系统,它们被安装在相对固定的位置上,模拟人眼的视觉系统的工作原理,从而可以实时捕捉和测量目标的三维结构和运动信息。
为了实现有效的三维视觉分析和计算机视觉任务,需要进行相机标定,即确定相机的内参和外参。
OpenCV是一个开源的计算机视觉库,提供了一系列用于相机标定的函数和工具。
下面将介绍如何使用OpenCV进行双目相机标定。
双目相机标定的步骤如下:1. 收集标定板图像,标定板是一个已知尺寸的棋盘格,通过拍摄不同姿态的标定板图像可以得到相机的内参和外参。
要注意的是,标定板要尽量填满整个图像空间,并且要保证标定板的图案清晰可见。
2. 在OpenCV中使用`cv::findChessboardCorners`函数寻找标定板的角点坐标。
该函数会返回标定板角点的像素坐标。
3. 使用`cv::calibrateCamera`函数进行内参标定,该函数会返回相机的内参矩阵和失真系数。
同时,还可以使用`cv::undistort`函数进行图像的去畸变操作。
4. 利用标定板角点的像素坐标和相应的三维世界坐标,使用`cv::stereoCalibrate`函数进行外参标定,该函数会返回两个相机之间的旋转矩阵和平移向量。
5. 对于双目图像,可以使用`cv::stereoRectify`函数进行图像的校正操作,使得两个相机的光轴平行,并且水平排布。
6. 校正后的图像可以用于立体视觉匹配和三维重建等任务。
对于立体视觉匹配,可以使用OpenCV中的`cv::StereoBM`和`cv::StereoSGBM`等函数进行视差图像的计算。
对于三维重建,可以根据得到的内参、外参和视差信息,利用三角测量等方法得到物体的三维坐标。
双目相机标定是计算机视觉中重要的一步,可以为后续的三维分析任务提供准确的视角和距离信息。
通过OpenCV提供的函数和工具,可以方便地进行双目相机标定,并且得到准确的内参、外参和视差信息,从而实现更精确的三维视觉分析。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
万方数据
万方数据
第3期李春艳等:一种双目立体视觉相机标定方法·53·
表l相机内参数的稳定性测试结果
表2相机外参数的稳定性测试结果外参数数值/mm外参数数值/(”)
AX。
0.104579△∞9.36597
△y10.087645△∞17.46691
AZ。
0.055662△k2.997428
从表1和表2可看出:
①内方位元素(并。
,Y。
,f)的稳定性测试结果的RMS较大,对测量精度的影响较大;
②径向畸变参数墨对测量结果的影响不显著;
③主距,的变化超过5pixel,稳定性差,主点位置(‰,Y。
)5次实验值的变化不超过1pixel;
④外参数中3个旋转参数(△(£.,△9,zik)稳定性差,而平移参数(zXX。
,AY。
,AZ。
)变化较小,即相机外参数的标定精度主要取决于3个旋转参数的精度.
2.2相机标定精度的验证
为了验证相机标定结果的有效性,将标定后得到的外方位元素和内参数代入式(6),则此时式(6)中只含有物方点坐标未知数,即可用多幅图像前方交会平差方法计算出各个物方点的坐标.
利用标定的相机结果,使用相机对不同距离处的视场内分布的24个空间物方点进行坐标测量.将相机测得的点坐标与经纬仪工业测量系统测得的相应点坐标进行比较,统计其差值即可验算标定结果的有效性"一,详细结果见表3.
由于经纬仪工业测量系统测得的点坐标精度优于0.05mm,因此可将其测得的坐标视为真值,而将相机测得的坐标与经纬仪工业测量系统测得的相应点坐标之差定为测量误差.
表3不同距离处空间点坐标的测量结果
·注:s。
.=√(ax)2+(△y)2+(△z)2
从表3可以看出:
①不同距离处,x方向与,,方向测量精度优于Z方向(即相机摄影方向)测量精度;
②随着相机测量距离的增大,测量精度会降低;
③相机测试空间点坐标的总测量误差取决于点坐标Z方向的测量精度;
③相机在1.5m测量距离处测量精度优于1.332mm,3.5m钡lJ量距离处测量精度优于3.837mm,6m测量距离处测量精度优于7.147mm,9m测量距离处测量精度优于21.227mm.
2.3极线误差分析
在月球车导航控制系统中,两个相机是固定在一个定长的基线上进行工作的,在工作过程中相机的相对位置和姿态不发生变化,因此利用两相机的外参数可将相机拍摄的图像沿极线方向进行重复采样,生成消除上下视差后的极线图像∞1.
图2为左右相机拍摄的标志点原始图像,对左、右图像进行极线校正,最终可生成消除上下视差后的极线图像.比较左右极线图像中对应的同名点坐标,可得到极线校正误差曲线。
如图3所示.
图2左右相机原始图像
万方数据
万方数据
一种双目立体视觉相机标定方法
作者:李春艳, 王立, 卢欣, 陈继华, 范生宏, LI Chunyan, WANG Li, LU Xin, CHEN Jihua, FAN Shenghong
作者单位:李春艳,王立,卢欣,LI Chunyan,WANG Li,LU Xin(北京控制工程研究所,北京,100190), 陈继华,范生宏,CHEN Jihua,FAN Shenghong(郑州辰维科技有限公司,河南,450001)
刊名:
空间控制技术与应用
英文刊名:AEROSPACE CONTRD AND APPLICATION
年,卷(期):2010,36(3)
被引用次数:0次
1.黄桂平数字近景工业摄影测量关键技术研究与应用 2005
2.冯文灏近景摄影测量 2002
3.王之卓摄影测量原理 1979
4.范生宏工业数字摄影测量中人工标志研究与应用 2006
5.黄桂平.李小勇.钦桂勤数码相机内参数的实验场法标定 2005(3)
6.王保丰.唐歌实.李广云.邢帅一种月球车视觉系统的匹配算法 2008(1)
1.学位论文刘浩基于双CCD火灾火焰识别及定位系统的研究2009
随着社会经济的发展和科学技术的进步,特别是城市人口的急剧增加和城市化进程的飞速发展,大空间场所会越来越多。
由于大空间场所火灾具有传播速度快、灭火和营救都比较困难等特点,所以如何有效的进行大空间场所火灾的安全防范以及尽早发现火灾的问题就变得越来越紧迫,作为一种新型的有效的早期火灾监控技术,图像型火灾监控技术倍受人们的关注。
图像型火灾监控技术是利用双CCD作为探头,将被监测区域的图像传回计算机,通过一系列的图象处理算法,来判别是否有火灾的发生,如果有火灾发生,则触动灭火装置扑灭火焰。
火灾火焰的识别定位系统是整个火灾监控系统中的重要组成部分,它直接关系到后续的工作,因此,利用计算机双目视觉进行火灾监控系统的识别和自动定位在火灾监控系统的设计中具有重要的地位。
本文通过对火灾图像的火灾火焰红色饱和度法和平均亮度法、高斯滤波、尖角度、Tsai标定方法等算法的使用,使火灾火焰能够被识别并且能够计算出火灾火焰距离双目摄像机的距离。
通过数种算法的集成,提出了利用尖角度识别火灾火焰的方法和利用双目相机与火灾火焰的几何关系计算距离的方法。
火灾火焰的识别试验,取得了比较好的效果,识别误差较小,成功率高;火灾火焰的距离测量试验,经过多次修改和实验,误差大大减小,提高了精度。
2.学位论文林国余基于视觉的车辆几何尺寸参数测量算法研究2008
基于机器视觉的测量技术是近年来测量检测领域研究的前沿和热点之一,而立体视觉技术或称之为双目视觉技术则是机器视觉中的重要研究内容之一。
本论文以总装汽车试验场项目为背景,旨在建立一套自动化程度高、测试技术先进的车辆几何尺寸参数测量系统。
本论文在实验室系统理论研究的基础上,结合近年来新兴的立体视觉技术,提出了基于立体视觉的车辆几何尺寸参数测量系统的具体测量方案和实现方法。
该测量方案具有自动化、非接触、高精度、通用性的特点,并且具有系统功能的扩展性,除可以测量常用车辆几何尺寸参数外,还可溶入对车辆外廓形貌的三维重构。
在车辆整车尺寸参数及通过性几何参数测量领域中,目前还未见类似技术的相关应用和研究报道,因此本论文提出的测量方法具有一定的创新性,此外,本论文中所提及的一些图像测量方法,对于其他应用也有一定的推广和借鉴作用。
本文从理论和实践两方面对双目立体视觉技术在车辆几何尺寸参数测量中的应用进行了深入研究和探讨,并对常见车辆几何尺寸参数的测量方法作了具体研究和阐述,本论文的主要研究内容包括如下几点:
(1)系统研究了照相机阵列的标定方法,包括单目相机标定、双目相机标定和相机阵列的全局标定。
在基于平面模板相机标定算法的思想基础上,本论文提出了一套完整的相机标定流程,包括棋盘靶标自动定位、棋盘靶标角点的提取、相机内外参数的线性估值以及相机参数的非线性优化等。
(2)根据不同类型车辆尺寸参数的特点和定义,本论文在研究过程中将不同尺寸参数进行合理归类,使每一类中的车辆尺寸参数可以采用类似方法进行测量,并研究了各类具体测量算法以及实现流程,从而实现了总长、总高、总宽、前悬、后悬、轴距、轮距、静力半径、自由半径、接近角、离去角和纵向通过角,共12个常用车辆几何尺寸参数的测量。
(3)对三维尺寸测量系统中一项重要的扩展功能——车辆形貌的三维重构,本论文也进行了研究和探讨。
三维重构算法采用Gray编码和相位编码相结合的复合编码方式,本论文对该三维重构方法的实现原理进行探讨,并根据实际应用场合进行算法改进。
此外,为了实现大视场下多视角的联合测量
,本论文对编码标志物和三维数据配准算法也进行了研究。
本文中具有创新性的研究工作概括如下:
(1)根据不同类型车辆尺寸参数的特点和定义,本论文归纳了各种不同类型车辆几何尺寸参数在测量方法上的共通点,而且从测量流程的延续性出发,将不同尺寸参数进行合理归类,使得每一类中的车辆几何尺寸参数可以采用类似的方法进行测量。
(2)为了获取车辆轮距参数,本论文设计了一种车辆轮距测量模型,并在该模型基础上提出一种基于胎冠切点的车辆轮距测量方法,通过获取车轮胎冠的切点进而计算车辆轮距参数。
(3)本论文通过车轮中心推导出车辆轴距、静力半径和自由半径的计算公式,由此提出一种三维空间圆自动提取算法,并根据该算法定位车轮中心,进而根据所建立的模型计算公式获得车辆轴距、静力半径和自由半径参数。
(4)针对无明显特征点,缺少纹理的物体表面,本论文通过对不同投影方法的分析和比较,提出一种分别投射横竖光栅条纹形成网格光栅的测量方法,该方法不仅可以快速有效地对物体表面进行离散采样,而且可以通过多次光栅平移,提高物体表面的采样精度以及三维重构精度。
(5)为了获取物体表面完整的数据信息,实现大视场下多视角的共同测量,本论文提出一种基于距离信息的标志点编码方法,该种编码方法简单,图像处理方便,在三维配准中具有良好的效果。
(6)为了提高靶标角点的定位精度,以及大场景中摄像机标定的自动化程度,本论文针对棋盘靶标图案,提出一种棋盘靶标角点自动定位算法,该算法包括棋盘靶标区域定位算法以及亚像素角点自动定位算法,并通过试验验证了该算法的有效性。
本文链接:/Periodical_kjkzjsyyy201003010.aspx
授权使用:上海交通大学(shjtdxip),授权号:f2d742b7-f8ee-4407-8cbe-9e5b0100bede
下载时间:2010年12月29日。