Graham算法求凸包完整程序代码
凸包算法

长 江 大 学 地 球 科 学 学 院
遗留有一个问题 就是处理共线的问题 有时候我们需要凸包边上的点也考虑到 有时候却需要去掉这些点 我们通常称在凸包顶点处的点为极点 如果我们只要求保留极点而去除在边上的点 我们只需在取外侧的点的时候 碰到共线的点取最远的 相反 如果我们要保留所有在边上的点我们只需要在共线的点中取最近的 同样由于参考点的性质 所有向量之间的到角都是在180度以内 不会产生错误
我们经常关注一个点集的凸包 这也是计算几何学的一个基本问题,现在 已经有成熟的算法可以求出平面点集的凸包,凸包有着优美而实用的 性质 我们可以利用凸包把一个杂乱的点集所包含的信息进行有效的 概括、梳理。
2 Graham扫描算法(Graham Scan Algorithm)
Graham扫描算法维护一个凸壳 通过不断在凸壳中加入新的点和去除影响 凸性的点 最后形成凸包 算法主体由两部分组成 先是排序 后是扫描 分块讲解一下
void Graham(int n) { int i,top=2; Pt[n]=Pt[0]; Stack[0]=Pt[0]; Stack[1]=Pt[1]; Stack[2]=Pt[2]; for(i=3;i<=n;i++) { while(Cross(Stack[top1],Stack[top],Pt[i])<=0&&top>1) top--; Stack[++top]=Pt[i]; } }
有了向量 我们就可以选取一个最外侧的点了
长 江 大 学 地 球 科 学 学 院
利用向量 我们可以比较哪个点"更外侧" 比如点K和点I 我们利用向量JK乘以向量JI得到一个数 这 个数应该是负数 说明I比K更外侧 两个向量的比较具有传递性 所以我们可以像N个数里取 最大的数一样取出最外侧的 遍历所有点 每个点都和现有最外侧的点比较 得到新的最 外侧的点
凸包——精选推荐
凸包算法模型想象在⼀个平⾯上钉下了n个钉⼦。
现在有⼀根橡⽪筋,我们把它撑开,期望在松⼿之后橡⽪筋可以收缩,包住所有的n个钉⼦。
事实上,这正是⼀个凸包。
如下图:引⼊凸包的概念:凸包,定义为周长最⼩的包含点集中所有点的凸多边形。
即使存在某个凹多边形的周长与凸包相等且可以包含所有点,这个凹多边形也⼀定不是凸包。
如下图,这个凹多边形不是该点集的凸包:凸包问题属于计算⼏何,通常可以使⽤Andrew,Graham,Jarvis,斜率逼近等算法求解。
本⽂将着重介绍其中思想通俗、代码简单的Andrew算法。
由于求解凸包需要⼀些前置的计算⼏何知识,本⽂将会介绍⼀些基础计算⼏何知识。
前置知识引进向量的概念。
在数学中,向量指同时具有⼤⼩和⽅向的量,与之相对的量称为数量。
数量只有⼤⼩,没有⽅向。
向量可以⽤⼀条带箭头的线段来形象地表⽰:箭头代表⽅向,线段的长度代表向量的⼤⼩。
如果向量的起点为A,终点为B,则这个向量可以记作→ab。
两个向量→x1,y1和→x2,y2的外积称之为叉积,它的结果是⼀个向量。
叉积的计算⽅法是 (x1y2)−(x2y1) ,记为→x1,y1×→x2,y2。
对于两个向量→ab,→bc,如果它们的叉积>0 ,说明→ab在→bc的顺时针⽅向;如果它们的叉积=0,说明→ab和→bc共线;如果它们的叉积<0,说明→ab在→bc的逆时针⽅向。
算法思想凸包Andrew算法的思想⾮常简单。
我们⾸先把点集按照以x坐标为第⼀关键字,以y坐标为第⼆关键字的⽅式进⾏双关键字从⼩到⼤排序,排序后的第⼀个点就是我们选出的极点。
两个关键字的顺序可以调换。
如下图,点 1 就是该点集的极点。
接着,我们从极点开始逆时针考虑将每⼀个点都加⼊凸包。
显然我们排序后的第⼀个点和最后⼀个点⼀定在凸包上。
从第⼆个点开始,我们假设当前点可以加⼊凸包。
设凸包上此时有m个点,第m−1 个点和第m个点分别是a,b,当前要加⼊凸包的点为c。
坐标点连接成多边形的程序

坐标点连接成多边形的程序多边形是几何学中的一个重要概念,它由一系列的顶点和边组成。
在计算机图形学和计算几何学中,我们经常需要编写程序来连接给定的坐标点,从而构造出多边形。
本文将介绍如何编写一个程序来实现这一功能。
我们需要明确程序的输入和输出。
输入是一组坐标点的集合,每个坐标点都有一个x和y坐标值。
输出是通过连接这些坐标点而构成的多边形。
接下来,我们需要确定程序的算法。
一种常见的算法是使用凸包算法来连接坐标点。
凸包算法是一种计算凸多边形的方法,它可以从给定的坐标点中找出一个包含所有点的最小凸多边形。
凸包算法的基本思想是,首先找到一个起始点作为凸包的一部分,然后按照一定的规则逐步添加其他点,直到形成一个封闭的凸多边形。
常用的凸包算法有Graham扫描算法和Jarvis步进算法。
以Graham扫描算法为例,我们可以按照以下步骤编写程序:1. 将所有坐标点按照x坐标从小到大进行排序;2. 选择第一个坐标点作为起始点,并将其入栈;3. 依次遍历剩下的坐标点,对于每个坐标点,判断其与栈顶两个点构成的直线是否是一个左转弯;4. 如果是左转弯,则将该点入栈;5. 如果不是左转弯,则将栈顶的点出栈,直到栈顶两个点与当前点构成的直线是一个左转弯;6. 遍历完所有的坐标点后,栈中的点即为凸包的顶点。
通过这个算法,我们可以将给定的坐标点连接成一个凸多边形。
如果需要连接成非凸多边形,我们可以通过添加额外的步骤来实现。
在实际编写程序时,我们可以使用编程语言如Python、C++或Java 来实现。
下面是一个使用Python语言实现的示例代码:```pythondef connect_points(points):sorted_points = sorted(points, key=lambda p: p[0])stack = [sorted_points[0]]for i in range(1, len(sorted_points)):while len(stack) >= 2 and orientation(stack[-2], stack[-1], sorted_points[i]) <= 0:stack.pop()stack.append(sorted_points[i])return stackdef orientation(p, q, r):return (q[1] - p[1]) * (r[0] - q[0]) - (q[0] - p[0]) * (r[1] - q[1])# 测试样例points = [(0, 0), (1, 1), (2, 2), (1, 0), (3, 1), (2, 0)] result = connect_points(points)print(result)```以上代码实现了一个连接坐标点的函数connect_points,它接受一个坐标点的列表作为输入,返回连接后的多边形的顶点列表。
葛立恒扫描法
葛立恒扫描法葛立恒扫描法(Graham Scan),又称凸包算法,是解决计算几何问题中的经典算法之一。
它的主要作用是计算多边形或点集的凸包,并返回凸包上的点集。
葛立恒扫描法的时间复杂度为O(nlogn),其中n是输入点集的大小。
凸包是一个简单多边形,可以包含给定点集中的所有点。
它的边界是由点集中的一些点组成的,这些点被称为凸包上的顶点。
凸包在计算几何、图形学以及计算机视觉等领域都有广泛的应用。
葛立恒扫描法的运行过程如下:1. 找到y值最小的点,并将它放在结果集中。
2. 将其余所有点按照与y值最小点的极角进行排序。
3. 对于每个点P,计算它与前两个点的极角。
如果它的角度不在逆时针方向,则将倒数第二个点从结果集中删除,然后重复此过程直到极角正确。
4. 返回结果集。
让我们来详细了解葛立恒扫描法的每个步骤。
找到y值最小的点要找到y值最小的点,我们可以遍历所有点,并找到纵坐标最小的那个。
在这里,我们使用了lambda函数来比较每个点的y值。
```python def find_lowest_point(points): lowest = min(points, key=lambda point: point[1]) return lowest ```排序接下来,我们需要将其余所有点按照与y值最小点的极角进行排序。
为此,我们需要定义一个函数来计算两点之间的极角。
在这里,我们使用了arctan2函数来计算极角。
```python def polar_angle(p1, p2=None): if p2 is None: p2 = lowest_point y_span =p1[1] - p2[1] x_span = p1[0] - p2[0] return atan2(y_span, x_span) ```然后,我们可以使用此函数来排序输入点集。
在这里,我们使用了sorted函数来排序。
```python def sort_points(points):sorted_points = sorted( points,key=cmp_to_key(lambda x,y: 1 if polar_angle(x) < polar_angle(y) else -1) ) returnsorted_points ```计算极角接下来,我们需要为每个点计算它与前两个点的极角。
convexhull函数

convexhull函数Convex Hull是计算凸包的一种常用算法,它是一个包围一组点的最小凸多边形。
凸包问题在计算机图形学、计算几何学和计算机视觉等领域中都有广泛的应用,用于解决诸如寻找最远点、点集包含关系判断等问题。
Convex Hull算法有多种实现方式,最常见的包括Graham Scan、Jarvis March以及Quick Hull。
下面将详细介绍Graham Scan算法。
1.算法思想:Graham Scan算法的基本思想是通过构建一个逆时针的类环排序,先找到最低的点(Y轴最小,如果有多个,则选择X轴最小的点),然后将其与其他所有点按照相对于最低点的极坐标进行排序。
排序后,按顺序将点加入凸包,同时保持凸包的有序性。
最后,返回生成的凸包。
2.算法步骤:a.找到最低点:遍历所有的点,找到Y轴最小值最小,并记录最低点的索引。
b.极坐标排序:除最低点外的其他点,根据其相对于最低点的极坐标进行排序。
c.构建凸包:依次将点加入凸包,同时根据凸包的有序性,维护凸包的结构。
d.返回凸包。
3.具体实现:下面是Graham Scan算法的伪代码实现:a.找到最低点:minPoint = points[0]for p in points:if p.y < minPoint.y or (p.y == minPoint.y and p.x < minPoint.x):minPoint = pb.极坐标排序:orientation = getOrientation(minPoint, point1, point2)if orientation == 0:return distSq(minPoint, point2) >= distSq(minPoint, point1) else:return orientation == 2c.构建凸包:hull = [minPoint]for i in range(1, len(sortedPoints)):while len(hull) > 1 and getOrientation(hull[-2], hull[-1], sortedPoints[i]) != 2:hull.pophull.append(sortedPoints[i])d.返回凸包:return hull4.时间复杂度:Graham Scan算法的时间复杂度为O(nlogn),其中n为点的数量。
平面散乱点集凸包算法matlab

平面散乱点集凸包算法matlab在计算几何学和计算机图形学中,凸包是一个常见的概念,它指的是包围一组点的最小凸多边形。
在平面上,凸包可以用于解决许多实际问题,比如寻找最远点对、计算最小包围矩形等。
在本文中,我们将介绍如何使用Matlab实现平面散乱点集的凸包算法。
Matlab是一种强大的数学计算软件,它提供了丰富的函数和工具箱,可以方便地进行凸包计算。
首先,我们需要明确凸包算法的基本原理。
凸包算法的一种常见实现是Graham扫描算法,它基于极角排序和栈的数据结构。
在Matlab中,我们可以使用sortrows函数对点集进行极角排序,然后利用栈来实现凸包的计算。
接下来,我们将以一个简单的示例来说明如何在Matlab中实现凸包算法。
假设我们有一组散乱的二维点集P,我们首先需要对这些点进行极角排序,然后利用栈来计算凸包。
matlab.function hull = convexHull(points)。
% Sort the points based on polar angle.[~, idx] = sortrows(points);sortedPoints = points(idx, :);% Initialize the stack.stack = [];% Graham scan algorithm.for i = 1:length(sortedPoints)。
while length(stack) > 1 && ccw(stack(end-1,:), stack(end,:), sortedPoints(i,:)) <= 0。
stack(end) = [];end.stack = [stack; sortedPoints(i,:)];end.hull = stack;end.function orientation = ccw(p1, p2, p3)。
orientation = (p2(2) p1(2)) (p3(1) p2(1)) (p2(1)p1(1)) (p3(2) p2(2));end.在上面的示例中,我们首先对点集进行极角排序,然后利用栈来实现Graham扫描算法。
凸包算法及凸包融合

凸包算法及凸包融合凸包算法是计算凸包的一种常用算法,它可以找到一组点集中最外层的凸多边形。
凸包融合是指将两个凸包合并成一个新的凸包,能够通过减少顶点数目来优化计算效率。
凸包算法主要有以下几种常见的实现方法:1.枚举算法:对于点集中的每一对点,判断其他点是否位于这两点所确定的直线的一侧。
如果所有点都在一侧,则这两点是凸包上的边。
时间复杂度为O(n^3)。
2. Graham扫描算法:选取一个点作为基准点,将其他点按照相对于基准点的极角大小进行排序。
然后依次处理每个点,判断其是否属于凸包。
时间复杂度为O(nlogn)。
3. Jarvis步进算法(也称为包裹法):从点集中选取一个临时点p,然后找到与p相邻的点集中极角最小的点q,将q加入凸包中。
然后将q作为新的临时点p,重复以上步骤,直到回到第一个点。
时间复杂度为O(nh),其中h是凸包的边数。
4.快速凸包算法:通过空间分割和递归的方法进行凸包计算,时间复杂度为O(nlogn)。
凸包融合是指将两个凸包合并成一个新的凸包,通常需要满足以下条件:1.相交边的共享:两个凸包如果相交,那么它们的公共边必须都在新的凸包中。
2.外部边的合并:如果两个凸包没有相交,那么合并后的凸包应该包含两个凸包的外部边。
3.顺序性:合并后的凸包应该按照某种规定的顺序进行连接。
凸包融合算法的一种常见方法是基于边的融合。
具体步骤如下:1.找到两个凸包之间的最近边,并将其作为起始边。
2.沿着其中一个凸包的边界向对面的凸包前进,每次选取与当前边最接近的边。
3.如果新选取的边与已经选取的边形成了一个角度大于180度的三角形,那么停止前进,并将新选取的边作为起始边。
4.重复步骤2和步骤3,直到回到起始边。
凸包融合算法可以减少凸包的顶点数量,从而提高计算效率。
例如,对于两个有m和n个顶点的凸包,假设m > n,则融合后的凸包最多有m+n个顶点,而不是m*n个顶点。
融合后的凸包可以保留原始凸包的边界信息,并且减少了计算和存储开销。
求凸包算法详解
概念凸包(Convex Hull)是一个计算几何(图形学)中的概念。
用不严谨的话来讲,给定二维平面上的点集,凸包就是将最外层的点连接起来构成的凸多边型,它能包含点集中所有点的。
严谨的定义和相关概念参见维基百科:凸包。
这个算法是由数学大师葛立恒(Graham)发明的,他曾经是美国数学学会(AMS)主席、AT&T首席科学家以及国际杂技师协会(IJA)主席。
(太汗了,这位大牛还会玩杂技~)问题给定平面上的二维点集,求解其凸包。
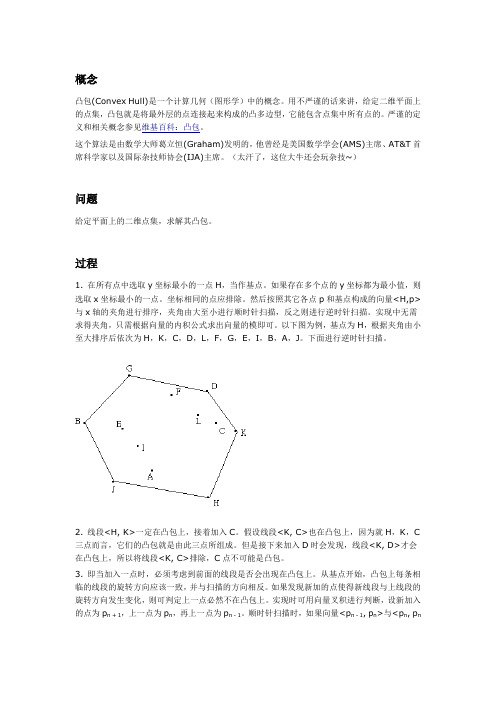
过程1. 在所有点中选取y坐标最小的一点H,当作基点。
如果存在多个点的y坐标都为最小值,则选取x坐标最小的一点。
坐标相同的点应排除。
然后按照其它各点p和基点构成的向量<H,p>与x轴的夹角进行排序,夹角由大至小进行顺时针扫描,反之则进行逆时针扫描。
实现中无需求得夹角,只需根据向量的内积公式求出向量的模即可。
以下图为例,基点为H,根据夹角由小至大排序后依次为H,K,C,D,L,F,G,E,I,B,A,J。
下面进行逆时针扫描。
2. 线段<H, K>一定在凸包上,接着加入C。
假设线段<K, C>也在凸包上,因为就H,K,C 三点而言,它们的凸包就是由此三点所组成。
但是接下来加入D时会发现,线段<K, D>才会在凸包上,所以将线段<K, C>排除,C点不可能是凸包。
3. 即当加入一点时,必须考虑到前面的线段是否会出现在凸包上。
从基点开始,凸包上每条相临的线段的旋转方向应该一致,并与扫描的方向相反。
如果发现新加的点使得新线段与上线段的旋转方向发生变化,则可判定上一点必然不在凸包上。
实现时可用向量叉积进行判断,设新加入的点为p n + 1,上一点为p n,再上一点为p n - 1。
顺时针扫描时,如果向量<p n - 1, p n>与<p n, p n>的叉积为正(逆时针扫描判断是否为负),则将上一点删除。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
#include <iostream>
#include <cmath>
#include <windows.h>
using namespace std;
/*
PointSet[]:输入的点集
ch[]:输出的凸包上的点集,按照逆时针方向排列
n:PointSet中的点的数目
len:输出的凸包上的点的个数
*/
struct Point
{
float x,y;
};
//小于,说明向量p0p1的极角大于p0p2的极角
float multiply(Point p1,Point p2,Point p0)
{
return((p1.x-p0.x)*(p2.y-p0.y)-(p2.x-p0.x)*(p1.y-p0.y));
}
float dis(Point p1,Point p2)
{
return(sqrt((p1.x-p2.x)*(p1.x-p2.x)+(p1.y-p2.y)*(p1.y-p2.y)));
}
void Graham_scan(Point PointSet[],Point ch[],int n,int &len)
{
int i,j,k=0,top=2;
Point tmp;
//找到最下且偏左的那个点
for(i=1;i<n;i++)
if
((PointSet[i].y<PointSet[k].y)||((PointSet[i].y==PointSet[k].y)&&(PointSet[i].x<Point Set[k].x)))
k=i;
//将这个点指定为PointSet[0]
tmp=PointSet[0];
PointSet[0]=PointSet[k];
PointSet[k]=tmp;
//按极角从小到大,距离偏短进行排序
for (i=1;i<n-1;i++)
{
k=i;
for (j=i+1;j<n;j++)
if( (multiply(PointSet[j],PointSet[k],PointSet[0])>0)
||((multiply(PointSet[j],PointSet[k],PointSet[0])==0)
&&(dis(PointSet[0],PointSet[j])<dis(PointSet[0],PointSet[k]))) )
k=j;//k保存极角最小的那个点,或者相同距离原点最近
tmp=PointSet[i];
PointSet[i]=PointSet[k];
PointSet[k]=tmp;
}
//第三个点先入栈
ch[0]=PointSet[0];
ch[1]=PointSet[1];
ch[2]=PointSet[2];
//判断与其余所有点的关系
for (i=3;i<n;i++)
{
//不满足向左转的关系,栈顶元素出栈
while(multiply(PointSet[i],ch[top],ch[top-1])>=0) top--;
//当前点与栈内所有点满足向左关系,因此入栈.
ch[++top]=PointSet[i];
}
len=top+1;
}
const int maxN=1000;
Point PointSet[maxN];
Point ch[maxN];
int n;
int len;
int main()
{
HDC hdc = GetWindowDC( GetDesktopWindow() ); //用桌面作为画图背景HPEN hpen1 = CreatePen( PS_SOLID, 1, RGB(255,0,0) );//画笔是像素为1的红色直线
HPEN hpen_old = (HPEN)SelectObject( hdc, hpen1 ); //选择设置的画笔
int n=80;
for(int i=0;i<n;i++)
{
PointSet[i].x=rand()%200+200;
PointSet[i].y=rand()%200+200;
SetPixel( hdc, PointSet[i].x, PointSet[i].y , RGB(0, 255, 0) );
}
Graham_scan(PointSet,ch,n,len);
for(i=0; i<len-1; i++)
{
MoveToEx( hdc, ch[i].x, ch[i].y, NULL);
LineTo( hdc, ch[i+1].x, ch[i+1].y );
}
MoveToEx( hdc, ch[0].x, ch[0].y, NULL);
LineTo( hdc, ch[i].x, ch[i].y );
return 0;
}。