12汽车系统动力学-可控悬架系统
汽车可控悬架系统的研究进展_寇发荣
*西北工业大学科技创新基金项目 (M 450211)资助 。 原稿收到日期为 2006年 5月 30日 , 修改稿收到日期为 2006年 8月 3日 。
2007(V o .l 29)N o. 5
寇 发荣 , 等 :汽车可控悬架系统的研究进展
4 27
悬架设计方案 。 主动悬架根据控制形式不同 , 又可划分为半主
变电场电压来调整电流变液的流动阻力 , 在极板间
产生可控压降 。
美国 Lo rd公司研发部的 Carlson和 W eiss等人 通过分析磁流变液的特性 , 指出其在场致屈服应力 、
适用温度范围 、物理化学稳定性 、能耗等方面均优于 电流变液[ 11] , 由此开创了国际上磁流变液研究的新
局面 。 他们特别强调磁流变液可用于汽车减振器 、
离合器和制动装置等 , 并开始磁流变液减振器的研
发 。磁流变液是一种由细小的磁性颗粒悬浮于绝缘
介质中形成的液体 。 这种液体具有随外加磁场变化
的可逆流变特性 , 其黏度随着外加磁场强度的增加
而递增 , 直至半固态 ;而一旦外加磁场消失 , 它又自
行恢复原状 , 整个过程可在毫秒级时间内完成 。 磁
流变阻尼器广泛应用于各种振动系统 , 具有阻尼大
关键词 :汽车 ;可控悬架 ;能量再生 ;研究进展
The Research T rend in C ontro lled Suspension System of V ehicles
K ou Farong& Fang Zongd e
C ollege of Mach inery and E lectronics E ng ineering, N orthw estern P oly technica l Un iversity, X i'an 710072
汽车悬架系统动力学模型的研究
1 绪论随着社会的发展和文明的进步,汽车作为一种交通工具,已成为人们出行的主要选择,汽车乘坐的安全性、舒适性已成为世人关注的焦点。
汽车作为高速客运载体,其运行品质的好坏直接影响到人的生命安全,因此,与乘坐安全性、舒适性密切相关的轿车动力学性能的研究就显得非常重要。
悬架系统汽车的一个重要组成部分,它连接车身与车轮,主要由弹簧、减震器和导向机构三部分组成。
它能缓冲和吸收来自车轮的振动,传递车轮与地面的驱动力与制动力,还能在汽车转向时承受来自车身的侧倾力,在汽车启动和制动时抑制车身的俯仰和点头。
悬架系统是提高车辆平顺性和操作稳定性、减少动载荷引起零部件损坏的关键。
一个好的悬架系统不仅要能改善汽车的舒适性,同时也要保证汽车行驶的安全性,而提高汽车的舒适性必须限制汽车车身的加速度,这就需要悬架有足够的变形吸收来自路面的作用力。
然而为了保证汽车的安全性,悬架的变形必须限定在一个很小的范围内,为了改善悬架性能必须协调舒适性和操作稳定性之间的矛盾,而这个矛盾只有采用这折衷的控制策略才能合理的解决。
因此,研究汽车振动、设计新型汽车悬架系统、将振动控制在最低水平是提高现代汽车性能的重要措施[1][2]。
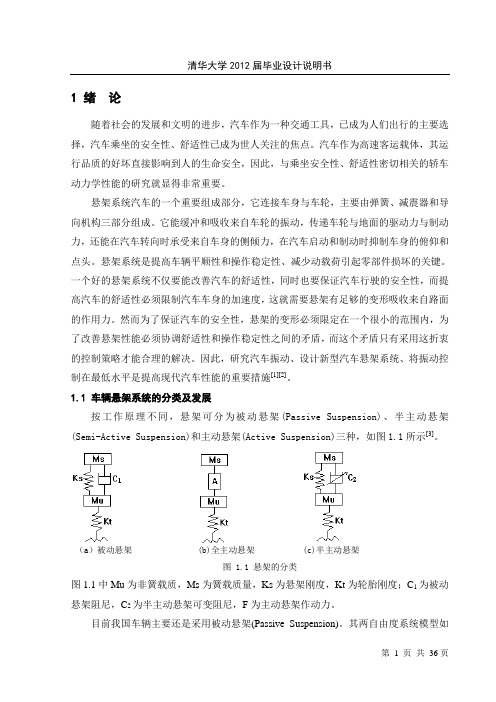
1.1 车辆悬架系统的分类及发展按工作原理不同,悬架可分为被动悬架(Passive Suspension)、半主动悬架(Semi-Active Suspension)和主动悬架(Active Suspension)三种,如图1.1所示[3]。
(a)被动悬架 (b)全主动悬架 (c)半主动悬架图 1.1 悬架的分类图1.1中Mu为非簧载质,Ms为簧载质量,Ks为悬架刚度,Kt为轮胎刚度;C1为被动悬架阻尼,C2为半主动悬架可变阻尼,F为主动悬架作动力。
目前我国车辆主要还是采用被动悬架(Passive Suspension)。
其两自由度系统模型如图1.1(a)所示。
传统的被动悬架一般由参数固定的弹簧和减振器组成,其弹簧的弹性特性和减振器的阻尼特性不能随着车辆运行工况的变化而进行调节,而且各元件在工作时不消耗外界能源,故称为被动悬架。
汽车底盘电控技术-5-电控悬架系统

使弹簧刚度变成“硬”状态和使减振阻尼变 成“中”状态。该项控制能改善汽车高速行驶时 的稳定性和操纵性
弹簧刚度和减振阻尼控制
不平整道路 控制
颠动控制
使弹簧刚度和减振阻尼视需要变成“中”或“ 软”状态,以抑制汽车车身在悬架上下跳动, 改善汽车在不平坦道路上行驶时的乘坐舒适 性
光电耦合元件的状态与车高的对照表
车高
1
光电耦合元件的状态
2
3
车高范围
计算结果
4
OFF
OFF
ON
OFF
15
过高
高
OFF
OFF
ON
ON
14
ON
OFF
ON
ON
13
ON
OFF
ON
OFF
12
高
ON
OFF
OFF
OFF
11
ON
OFF
OFF
ON
10
ON
ON
OFF
ON
9
普通
ON
ON
OFF
OFF
8
ON
ON
ON
OFF
一般原理:
利用传感器(包括开关)检测汽车行驶时路面的状况和车 身的状态,输入ECU后进行处理,然后通过驱动电路控制 悬架系统的执行器动作,完成悬架特性参数的调整。
二、传感器的结构与工作原理
转向盘转角传感器
传感器位置
加速度传感器
车身高度传感器 加速度传感器
车身高度传感器
1、转向盘转角传感器
【作用】检测转向盘的中间位置、转动方向、转向角 度和转动角度。以判断转向时侧向力的大小和方向, 以控制车身的侧倾。
12_可控悬架系统
统
10~20ms,为实现复杂的控制策略提供了硬件保证。
动
➢控制策略可按测量得到的车身绝对和相对速度制定:
力
➢二者同号时,阻尼设为硬档;
学
➢二者异号时,阻尼设为软档。
与自适应系统的区别
➢能够不断地快速改变其阻尼状态;
➢制造精度和成本相对较高,很少应用。
马 天 飞
7
汽
第四节 全主动系统
车 工作原理
系
系
➢其主动作动响应的频率为0~6Hz,也称为“慢主动悬架”;
统
➢为使悬架在超过可控带宽时仍起作用,作动器还必须与一普通弹
动
簧串联,也减少了系统的能量需求。
力
学
马 天 飞
10
汽 有限带宽主动系统的实施方案
车
➢由于作动器的成本较低,因此发展较快。
系
➢Nissan Infiniti Q45和Toyota Celica
力
➢
➢可切换阻尼系统
➢高档阻尼与P点相同,低档为0.2倍。
马
天
➢自适应系统在此工况下的工作点为A。
飞
14
汽
几种悬架的性能比较
车
➢随着悬架系统的升级,系统 系 的阻尼可调空间愈加宽广,但 统 能量消耗相应地增加。 动 ➢在控制策略中考虑了一些附 力 加因素,如车辆转弯或制动时
飞
悬架单元单独工作。
4
汽 可调式减振器
车 ➢双活塞式减振器
系
➢可实现两个相互独立的阻尼特性;
统
➢每个旋转滑阀在拉伸行程刚度大,
动
阻尼力也大;
力
➢调整时间较长,30~200ms,突然
学
遇到障碍时将会反应不及。
可控悬架 操纵动力学(第六次课)

M
Y
Z
aFY 1 cos d bFY 2
考虑到d角较小,上式可写作
F k k M ak bk
1 1 2 2 Z 1 1 2
2
汽车前、后轮侧偏角与其运动参数有关。其值为
v u v a r a r u u 根据坐标系的规定,前、后轮侧偏角为
可控悬架系统 操纵动力学
被动悬架
车身高度调节系统
自适应阻尼调节系统
• 自适应阻尼控制悬架系统将加速传感器、 转角传感器、车身加速度传感器等接收的 信号输入ADS 电子控制装置(ADS ECU), 并根据车辆的行驶状况自动调节减振器的 阻尼力,以适应路面的变化,即使在汽车 进行避障行驶时,也可以保持良好的乘坐 舒适性。
Z2 mw
mw z2 kt z3 U a m z U b 4 a z1 z2 z4 z3 z4 z0
Ua
Z1
Z4 Z3
• 定义一个新的状态矢量
( x1 , x2 , x3 , x4 ) ( z1 , z2 , z1 , z2 )
1、转向盘角阶跃输入下的稳态 响应—转向特性 转向盘角阶跃输入下的瞬态响应
2、横摆角速度频率响应特性 3、转向盘中间位置操纵稳定性 4、回正性 5、转向半径
基本操纵模型
• 线性二自由度数学模型的理想化假设条件 • 忽略转向系的影响,以前轮转角作为输入; • 汽车只进行平行于地面的平面运动,而忽略悬 架的作用; • 汽车前进(纵轴)速度不变,只有沿y轴的侧向 速度和绕z轴的横摆运动(ay<0.4g) ; • 驱动力不大,对侧偏特性无影响; • 忽略空气阻力; • 忽略左右轮胎因载荷变化引起轮胎特性的变化; • 忽略回正力矩的变化。
第09章 电控悬架系统
第9章电控悬架系统9.1 概述车辆行驶在复杂的环境里,即路况(路面不平度等级)、车速以及工况(加速、制动、转向、直线行驶)经常要发生变化。
例如汽车在急速起步或急速加速时会产生“加速后仰”现象,汽车高速行驶紧急制动时会产生“制动点头”现象;汽车在急转弯行驶时会产生“转向侧倾”现象。
上述情况会对汽车的行驶平顺性和操纵稳定性产生不利的影响。
被动悬架由于其结构特点,很难保证汽车的乘坐舒适性和操纵稳定性同时达到最佳。
因此,为解决这一问题产生了根据工况要求保证汽车的性能达到最佳的电控悬架。
电控悬架采用传感器技术、控制技术和机电液一体化技术对汽车的行驶工况进行监测。
由控制计算机根据一定的控制逻辑产生控制指令控制执行元件产生动作,保证汽车具有良好的行驶性能.9.1.1 电控悬架的功能1 调节车身高度。
汽车载荷变化时,电控悬架系统能自动维持车身高度不变,汽车即使在凸凹不平道路上行驶也可保持车身平稳。
2 提高车辆的行驶平顺性和操纵稳定性,抑制车辆姿态的变化(后仰、点头、侧倾) 。
当汽车急速起步或加速行驶时,由于惯性力及驱动力的作用,会使车尾下蹲产生"后仰"现象。
电控悬架能够及时地改变悬架的俯仰角刚度,抑制后仰的发生。
当汽车在高速行驶中紧急制动时,由于惯性力和轮胎与地面摩擦力的作用,会使车头下沉产生制动点头现象。
电控悬架能使汽车在这种工况下车头的下沉量得到抑制。
当汽车急转弯时,由于离心力的作用汽车车身向一侧倾斜,转弯结束后离心力消失。
汽车在这样的工况下会产生汽车车身的横向晃动.电控悬架在这种工况下能够减少车身倾斜的程度、抑制车身横向摇动的产生。
因此,电控悬架在一定程度上能使悬架适应负荷状况、路面不平度和操纵情况的变化.3 提高车轮与地面的附着力,改善汽车制动性能和提高汽车抵抗侧滑能力。
普通汽车在制动时车头向下俯冲,由于前、后轴载荷发生变化,使后轮与地面的附着条件恶化,延长了制动过程。
电控悬架系统可以在制动时使车尾下沉,充分利用车轮与地面的附着条件,加速制动过程,缩短制动距离。
汽车系统动力学
《汽车系统动力学》教学大纲一、课程性质与任务1.课程性质:本课程是车辆工程专业的专业选修课。
2.课程任务:本课程要求学生学习和掌握车辆系统的主要行驶性能,如牵引性能、车辆的动态载荷、转向动力学等。
研究路面不平度激励的振动。
了解该领域世界发展及最新成果。
通过学习本课程,掌握汽车动力学分析的一般的理论和方法,为今后汽车系统动力学分析、从事该领域研究、开发奠定基础。
二、课程教学基本要求本课程是研究所有与汽车系统运动有关的学科,其内容可按车辆运动方向分为纵向、垂向和侧向动力学三大部分。
要求学生了解车辆动力学建模的基础理论、轮胎力学及汽车空气动力学基础之外,重点理解受汽车发动机、传动系统、制动系统影响的驱动动力学和制动动力学,以及行驶动力学(垂向)和操纵动力学(侧向)内容。
运用系统方法及现代控制理论,结合实例分析,介绍了车辆动力学模型的建立、计算机仿真、动态性能分析和控制器设计的方法,同时使学生对常用的车辆动力学分析软件有所了解。
成绩考核形式:末考成绩(闭卷考试)(70%)+平时成绩(平时测验、作业、课堂提问、课堂讨论等)(30%)。
成绩评定采用百分制,60分为及格。
三、课程教学内容绪篇概论和基础理论第一章车辆动力学概述1.教学基本要求让学生了解车辆动力学的历史发展、研究内容和范围、车辆特性和设计方法、术语、标准和法规、发展趋势。
2.要求学生掌握的基本概念、理论、技能通过本章教学使学生了解车辆动力学的历史发展、研究内容和范围、车辆特性和设计方法、发展趋势。
3.教学重点和难点教学重点是车辆动力学的研究内容和范围、车辆特性和设计方法。
教学难点是车辆特性和设计方法。
4.教学内容第一节历史回顾1.车辆动力学的历史发展第二节研究内容和范围1.纵向动力学2.行驶动力学3.操作动力学第三节车辆特性和设计方法1.期望的车辆特性2.设计方法3.汽油机与柴油机速度特性的比较第四节术语、标准和法规1.汽车术语、标准和法规第五节发展趋势1.车辆的主动控制2.多体系统动力学3.闭环系统和主观与客观评价第二章车辆动力学建模方法及基础理论1.教学基本要求让学生了解动力学方程的建立方法、非完整系统动力学、多体系统动力学方法。
车辆系统动力学资料课件

• 车辆系统动力学概述 • 车辆动力学模型建立与仿真 • 车辆系统动力学性能分析与优化 • 车辆系统动力学控制策略与应用 • 总结与展望
01 车辆系统动力学概述
车辆系统动力学的发展历程
20世纪60年代
20世纪70年代
车辆系统动力学开始得到关注和研究,主 要涉及车辆的稳定性、操纵性和乘坐舒适 性等方面。
车辆系统动力学优化实例
实例1
某型汽车的稳定性优化,通过优化悬挂系统和车身结构,显著提高 了车辆在高速行驶和弯道行驶时的稳定性。
实例2
某型卡车的平顺性优化,通过优化驾驶室和货箱的结构,有效降低 了驾驶员在长途运输中的疲劳程度和货物的破损率。
实例3
某型跑车的操控性优化,通过优化车身结构、悬挂系统和制动系统 ,提高了车辆在高速行驶和紧急制动情况下的操控性能。
03
研究成果与应用
研究人员已经将车辆系统动力学控制 策略应用于实际车辆中,并取得了良 好的控制效果。
车辆系统动力学控制算法设计与实现
控制算法设计
算法实现方法
算法实现方法包括基于MATLAB/Simulink的仿真 实现、基于实际车辆的实验实现等。
车辆系统动力学控制算法的设计需要考虑多 种因素,如车辆动力学特性、道路条件、驾 驶员行为等。
随着计算机技术的发展,车辆系统动力学 开始进入仿真模拟阶段,通过计算机模拟 来研究车辆的动力学行为。
20世纪80年代
20世纪90年代至今
车辆系统动力学的研究范围不断扩大,开 始涉及到安全、控制、智能驾驶等领域。
车辆系统动力学得到了广泛应用,不仅在 汽车领域,还在航空、航天、军事等领域 得到应用。
车辆系统动力学的研究对象和研究方法
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
12.5各类悬架系统的性能比较
性能比较
12
MATLAB/SIMULINK 简介 垂向动力学实例
13
MATLAB 简介
MATLAB 是什么?
MATLAB是由美国MathWorks公司开 发的一种进行科学和工程计算的 交互式软件包。它起源于20世纪 70年代的 “矩阵实验室” (Matrix Laboratory)。随着软 件版本的不断更新,其功能已涵 盖到了诸如一般数值运算、数字 信号处理、系统识别、自动控制、 优化设计、神经网络、化学、统 计学等各个学科和工程应用领域。 MATLAB的功能主要是由各种工具箱 (Toolbox) 来实现的,其核心 工具箱可分为两类:即功能性工具箱和学科性工具箱。
7
12.3全主动悬架系统
1.运动方程
mw z1 Kt ( z0 z1 ) U a
mb z2 U a
2.性能优化 定义一个新的状态变量
( x1
x2
x3
x4 )T ( z1
z2
z1
z2 )T
运动方程变为:
x1 z1 x3 x2 z2 x4
x3 z1 [ Kt ( z0 z1 ) U a ]/ mw x4 z2 U a / mb
x' = Ax+Bu y = Cx+Du
Band-Limited White Noise1
Random Number
State-Space
建立好的模型如下图所示:
25
1. ¼ 车辆悬架建模(被动部分)
Accel. x' = Ax+Bu y = Cx+Du Band-Limited White Noise State-Space DTD.
20
1.¼ 车辆悬架建模(被动部分)
路面输入模型为:
g (t ) 2f 0 x g (t ) 2 G0U 0 w(t ) x
m3 / cycle ; 其中,f0为下截止频率, Hz ; G0 为路面不平度系数, U 0 为前进车速, m / sec ; w 为均值为零的随机输入单位白噪声。
14
MATLAB 简介
功能性工具箱可应用于多学科,主要可用来扩充其符号计算功能, 如符号计算工具箱(Symbolic Math Toolbox)、图形建模仿真功能、 文字处理功能,甚至还发展到可以实现硬件实时交互功能,如Real time workshop工具箱。而学科性工具箱专业性较强,如控制系统工 具箱(Control System Toolbox)、优化工具箱(Optimization Toolbox)、信号处理工具箱(Signal Processing Toolbox)、系统 识别工具箱(System Identification Toolbox)等,这些工具箱都 是由该领域的专业人员编写的,针对自己的研究问题,用户可方便地 选择使用。
4
12.1概述 3.半主动悬架
半主动悬架就是指可以根据汽车运行时的振动及工况变化情况, 对悬架阻尼参数进行自动调整的悬架系统。为了减少执行元件所需 的功率,一般都采用调节减振器的阻尼,使阻尼系数在几毫秒内由 最小变至最大,使汽车振动频率被控制在理想的范围内。半主动悬 架为无源控制,在汽车转向、起步及制动等工况时,不能对悬架的 刚度和阻尼进行有效的控制。
SWS.
在噪声产生模块中,随机信号的方差为单位值。
26
1. ¼ 车辆悬架建模(主动部分)
运动微分方程这时变为:
M b xb ks ( xw xb ) U M w xw ks ( xw xb ) kt ( xw xg ) U
状态方程此时变为:
X AX FW BU
5
12.2车身高度调节系统
□目前典型的车身高度调节系统有可调空气悬架系统和可调油气悬架系统
□可调高度调节系统的主要优点是不论静载荷如何变化,悬架工作空间可 保持恒定或根据需要进行调节。 □车身高度调节系统可采用较小的弹簧刚度,改善了车辆的乘坐舒适性。
6
12.3全主动悬架系统
全主动悬架采用一个作动器,来取代传统被动悬架中的弹簧和减振器,作动器 根据控制信号来产生相应大小的作用力。
汽车系统动力学
主讲:胡爱军
1
第十二章
12.1概述 12.2车身高度调节系统 12.3全主动悬架系统
可控悬架系统
12.4连续可变阻尼的半主动悬架系统
12.5各类悬架系统的性能比较
2
12.1概述 悬架系统的作用是承受和传递车轮与车架之间所受的各 种力和力矩,以及吸收和减缓汽车运行过程中所受的冲击和振 动,提高车辆的平顺性和稳定性。行驶车辆的平顺性和稳定性 是衡量悬架性能好坏的主要指标,但是二者对悬架的刚度和阻 尼的要求是互相排斥的。 传统悬架的刚度和阻尼只能是根据一定的载荷、某种路面 情况和车速,兼顾各方面的要求,优化选定一种刚度和阻尼, 这种刚度和阻尼一定的悬架称之为被动悬架。 由于汽车在行驶过程中,载质量、路面情况及车速是变化 不定的,因此刚度和阻尼一定的被动悬架不可能在改善汽车行 驶平顺性和操纵稳定性方面再有大的作为,已不能适应现代 汽车对乘座舒适性和操纵稳定的更高要求。
8
12.3全主动悬架系统
最优控制: 假定路面位移输入变量是一个积分白噪声,即: 系统模型可写成状态方程行式:
z0 w
X AX BU a B1w
优化目标是使车身垂直加速度和轮胎动载荷达到最小,同时保证悬架动行程 在允许范围内。优化指标函数J可定义为各项性能指标的加权平方和的积分。
1 2 J [q1 ( z0 z1 ) 2 q2 ( z1 z2 ) 2 U a ]dt 0 2
求出使优化指标J最小的控制力。
1)全状态反馈控制 2)有限状态反馈控制
U a K f 1 ( z1 z0 ) K f 2 ( z2 z0 ) K f 3 z1 K f 4 z2
U a Kl1 z1 Kl 2 z2 Kl 3 z1 Kl 4 z2
9
12.4连续可调阻尼的半主动悬架系统
3
12.1概述 1.电子控制悬架的作用 电子控制悬架系统由传感器、控制器和执行机构组成。电 子控制悬架系统能自动控制车辆悬架的刚度、阻尼系数及车身 高度根据汽车载质量、车速和路面情况的变化而改变悬架特性, 因而可最大限度地提高汽车的行驶平顺性和操纵稳定性,适应 了现代汽车对乘座舒适性、行车安全性更高的要求。 2.电子控制悬架的类型 电子控制悬架的优点是能随汽车载质量和工况变化而自动 改变悬架刚度和阻尼,以提高汽车的平顺性和稳定性。电子控 制悬架则属于主动悬架,但根据是有源控制还是无源控制可分 为半主动悬架和全主动悬架两类。
输出方程:
Y CX DU
27
2.线性随机最优控制理论的应用
控制流程:
xg
1/4 car model
u KX
Y xb xw xg xb xw
连续可调阻尼的半主动悬架,其减振器产生的阻尼力能独立地跟踪力需求信 号,与减振器本身的相对速度无关。
10
12.4连续可调阻尼的半主动悬架系统
根据1/4模型,半主动系统的运动方程如下:
z2
mb
Ks
mw
Kt
mw z 1 K t ( z 0 z 1 ) K s ( z 1 z 2 ) U mb z2 K s ( z1 z2 ) U d
其中,A 为状态矩阵,F 为输入矩阵,其值如下:
0 0 A 1 0 0 0 0 0 1 0 Ks mb Ks mw 0 0 0 Ks mb Kt Ks mw 0 0 0 0 Kt mw 0 0 2f 0
F 2
T
Y [ xb , ( xw xg ), ( xb xw )]
23
1. ¼ 车辆悬架建模(被动部分)
则我们可以将性能指标项写为状态变量以及输入信号的线性组合形 式,即:
Y CX
C 为输出矩阵:
0 0 ks / M b ks / M b 0 C 0 0 0 1 1 1 1 0 0 0
d
Cs
z1
U d 表示可控的阻尼力。
如果悬架相对位移、车轮速度、车身速度可测,则 作为有限状态反馈变量,阻尼控制力应为:
z0
U d [Kl 1(z 1 z 2 ) K l2 z 1 K l3 z 2 ]K s z (1 z2 )
附加控制律:
( z1 z2 )U d 0 U d U d, opt Ud 0 ( z1 z2 )U d 0
上式表明,路面位移可以表示为一随机滤波白噪声信号。 这种表示方式来源于试验所测得的路面不平度功率谱密度 (PSD)曲线的形状。
21
1. ¼ 车辆悬架建模(被动部分)
我们若选取状态变量为:
X xb
xw
xb
xw
xg
T
则可将系统运动方程及路面激励写成状态空间矩阵形式,即:
X AX FW
19
1.¼ 车辆悬架建模(被动部分)
对于如图所示的一个1/4车辆模 型,首先建立运动微分方程:
mb xb Ks ( xb xw )
mw xw Ks ( xb xw ) Kt ( xg xw )
状态空间(State-Space) 形式
x Ax Bu y Cx Du
0 0 G0U 0 0 0
22
1. ¼ 车辆悬架建模(被动部分)
W [ w(t )] 为高斯白噪声输入矩阵。
若我们将车身加速度、轮胎动变形、悬架动行程作为性能指标,即:
Concerned Performance Items are:
B. A : xb D.T .D : xw xg S .W .S : x x b w