电子定量包装秤系统设计
电子秤课程设计系统分析
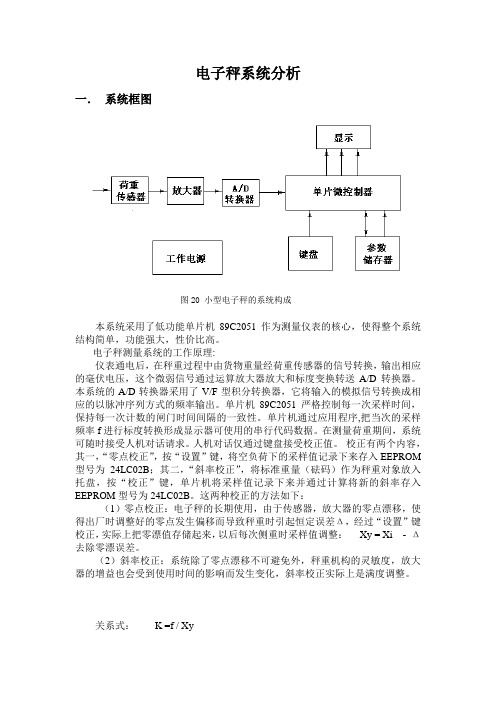
电子秤系统分析一.系统框图图20 小型电子秤的系统构成本系统采用了低功能单片机89C2051作为测量仪表的核心,使得整个系统结构简单,功能强大,性价比高。
电子秤测量系统的工作原理:仪表通电后,在秤重过程中由货物重量经荷重传感器的信号转换,输出相应的毫伏电压,这个微弱信号通过运算放大器放大和标度变换转送A/D转换器。
本系统的A/D转换器采用了V/F型积分转换器,它将输入的模拟信号转换成相应的以脉冲序列方式的频率输出。
单片机89C2051严格控制每一次采样时间,保持每一次计数的闸门时间间隔的一致性。
单片机通过应用程序,把当次的采样频率f进行标度转换形成显示器可使用的串行代码数据。
在测量荷重期间,系统可随时接受人机对话请求。
人机对话仅通过键盘接受校正值。
校正有两个内容,其一,“零点校正”,按“设置”键,将空负荷下的采样值记录下来存入EEPROM 型号为24LC02B;其二,“斜率校正”,将标准重量(砝码)作为秤重对象放入托盘,按“校正”键,单片机将采样值记录下来并通过计算将新的斜率存入EEPROM型号为24LC02B。
这两种校正的方法如下:(1)零点校正:电子秤的长期使用,由于传感器,放大器的零点漂移,使得出厂时调整好的零点发生偏移而导致秤重时引起恒定误差Δ,经过“设置”键校正,实际上把零漂值存储起来,以后每次侧重时采样值调整:Xy = Xi - Δ去除零漂误差。
(2)斜率校正:系统除了零点漂移不可避免外,秤重机构的灵敏度,放大器的增益也会受到使用时间的影响而发生变化,斜率校正实际上是满度调整。
关系式:K =f / Xy其中,可K 为斜率, f 为采样频率,Xy 荷重。
图21 斜率校正二测量系统的电路分析:1. 放大器:绝大多数的电子秤都采应变式传感器作为荷重变换器。
这是因为应变式传感器结构简单,体积小,精度高,非线性误差小,量程调整容易等优点。
本系统采用的是平行梁式,这是一种根据弹性材料受到压力后变形产生应变,使粘贴在弹性材料上的应变元件或压缩或拉伸,引起应变元件的电阻相应变化。
基于信捷PLC的定量称重包装控制系统设计

基于信捷PLC的定量称重包装控制系统设计在化工吸附分离过程中,需要将原料进行在线称重并包装,利用信捷XD系列PLC实现定量算法,采用最新高速处理称重模块采集数据,极大降低称重中产生的延时性、测量误差,利用人机界面HMI进行人机交互,操作简单,并给出了具体的实现。
标签:定量称重;信捷PLC;HMI引言称重是将物料进行在线等重量称量。
在化工吸附分离过程中,需要将原料进行在线称重并包装,针对这一要求,本控制系统采用信捷的工控产品,开发出一套控制设备,利用HMI作为现场工人的操作界面,PLC作为上料下料,数据采集的控制部件,称重模块进行在线称重[1]。
在技术性能方面做到速度高、准确度高、稳定性高、可靠性高,在应用性方面做到综合性、组织性。
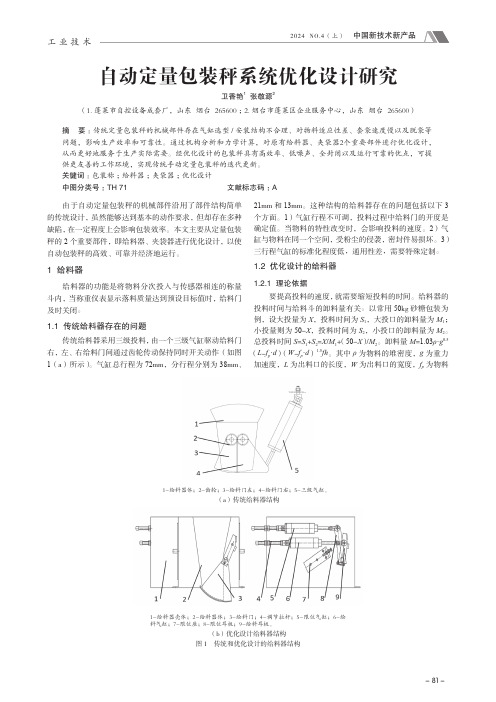
1 定量称重包装机组成定量称重包装机由定量称重包装控制器和备料斗、计量斗、夹袋机构、截料装置、下料阀、放料阀、称重传感器等部分组成,定量称重包装示意图如图1所示。
备料斗为缓冲式料仓,用于物料存储并提供一个接近均匀的物料流;阀门位于备料斗底部,当设备检修或出现故障时,用于将物料封阻在备料斗内;截料装置在称重过程中提供快、中、慢三级给料;秤体主要有计量斗、称重支架和称重传感器组成,完成重量到电信号的转变并传输到控制单元;夹袋机构的作用是夹紧包装袋,让称重完成的物料全部落入包装袋。
2 硬件设计称重控制器包括信捷XD系列PLC,信捷HMI[2],称重模块,称重传感器等部分组成,硬件组成如图2所示。
2.1 PLCPLC采用信捷电气的XD3-24R-E,基本处理指令0.02~0.05us,扫描时间10000步1ms,程序容量高达128K。
具有两个通信口,支持RS232和RS485可连接多种外围设备。
采用AC220V交流供电,具有8个继电器输入和8个继电器输出。
2.2 HMIHMI采用信捷电气的TH765-N触摸屏,7英寸触摸屏,耐油耐脏,6万色真彩,支持BMP、JPG格式图片显示。
自动定量包装秤系统优化设计研究
夹袋器的功能决定了夹紧力的可靠性,这对夹袋器是非 [2] 成大先 . 机械设计手册 气压传动 [M].4版 . 北京 :化学工业
常重要的指标。以包装袋为研究对象进行受力分析(如图 6 出版社,2004.
(a)所示)可发现夹紧原理就是利用摩擦力的平衡原理。使 [3] 孙桓,葛文杰 . 机械原理 [M]. 北京 :高等教育出版社,2021.
大投料
伸出 伸出 打开
小投料
一次缩回 不动作 部分关闭
结束
二次缩回 缩回
全部关闭
1.2.3 优化设计
优化设计后的给料器具有以下 4 个优点。1)给料门的开 度任意可调,保证给料时间最短。2)取消三级给料,采用二 级给料,缩短给料时间,提高包装效率。3)气缸连接于给料 器体外壳侧面,有效隔离粉尘,气缸使用寿命长,维护方便。 4)采用 2 个通用类标准气缸 SE40X80,无须特殊定制。
包装袋保持平衡,不滑落的条件为 W-2FS=0,FS ≤ FSmax=fS·N,
W=2FS ≤ 2fS·N。其中 fS 为静摩擦系数,W 为重力和冲击力之
和,FS 为静摩擦力,N 为夹紧力 [4]。
在 fS 静摩擦系数一定的情况下,夹紧
X1
α1
力 N 越大,包装袋可以承受的 W 就
[4] 哈尔滨工业大学理论力学教研室 . 理论力学 [M].9版 . 北京 : 高等教育出版社,2023.
工业技术
2024 NO.4(上) 中国新技术新产品
2.2 优化设计的夹袋器
2.2.1 机构设计
优化设计的夹袋器称为气动指夹,是一个独立的夹紧单 元。如图 5(b)所示,气缸与主动杆连接,主动杆属于原动 件,连杆与夹板组成 2 套Ⅱ级杆组,构成从动系统,保证夹板 开度一致,满足机构的组成原理(杆组依次连接到原动件和机 架上 [3])。气缸活塞杆缩回时,主动杆通过连杆使两侧夹板同 时闭合,夹紧包装袋,气缸活塞杆伸出时夹板分离,即可松开 包装袋。 2.2.2 夹紧力分析
DCS智能型定量包装称重系统的设计与应用
] 1 6 ] 1 5
I3 2 3 l8 8 2 6 6
2 )计量准确度 :静态 ± . O1 %,动态 ± . 0 %。 2 3 )包 装准确度 :十次称 量平 均值 的允 差 ±
1 ‰ ,单 次称 量 的允 差 ±4 o . 6 %。 4 称量 速度 :20~30次 / 。 ) 4 2 时 52 试 验 条件 . 1 试验 用物 料 )
清除振落粘附在料斗内壁 上的积粉 ,有利于提 高 称量 准确 度 。 D S系列智 能型定量包装称重系统配备 的气 C
源 为 (. )MP ,01 3 i。 04~0 6 a .m/ n m 5 智 能 型 定 量 包 装 称 重 系 统 的 应 用 与 误 差
分 析
DS C 智能型定量包装称重 系统在轻工 、化工 、 冶金 、建材 、港 口、矿 山、食 品 、粮食等行业得 到 了广泛 的应用 ,因此 ,弄清该 系统在 自动称量
器的 3%一0 0 7 %额定容量范围内。这样既提高 了系 统的可靠性 ,又延长了传感器的使用寿命 。 4 )传感 器 准确度 的选择
传感器准确度 等级 的选择 ,既要满足电子秤 对准确度级别 的要求 ,又要考 虑到价格 的低廉 。
传感 器准 确度 等级划 分如 表 1 示 。 所
5  ̄及 以上 ,首先应选用耐高温称重传感器 ,其 0C 它环境和使用场合可选用普通称重传感器 。 2 )传感器型式的选择 传感器型式的选择主要取决 于秤量系统的类 型 和安 装 空 间 。 当然 也 要兼 顾 考 虑 其 它 方 面 ,诸 如周围环境 ,加载类型等。对 于智能型定量包装 称重 系统 可选 用悬臂 梁式 的称重 传感 器 。 3 )传感器量限的选择 秤量 系统 的称 量值越 接 近 传感 器 的额 定容 量 , 其称量准确度就越高 。但 在实 际使用时 ,由于传 感器的载荷除被称物 以外 ,还存在秤体 自重 、皮 重 ( 料 斗 ) 以及 振 动 冲击 等 载荷 的存 在 。因 而 如 不 同 的称量 系统 选 用传 感 器 的量 限原 则 差异 极 大 。 根 据经 验 ,一 般 选 用 时应 使 传 感 器 工 作 在 该 传 感
电子称系统方案的设计
系统方案的设计1.1 电子秤的设计要求1.1.1 基本要求1、重量显示:单位为千克;电子秤称重范围:0~9.999Kg;重量误差不大于 0.005Kg;2、能用简易键盘设置单价,加重后能同时显示重量、单价和金额;3、液晶显示:所称物体重量、10种商品的购物清单等。
1.1.2 特色与创新1、使用单片机为控制核心,大大简化了系统的组成构造,且单片机可拓展性强,可以很方便的对系统进行拓展和应用。
2、使用键盘输入数据,操作简单,方便。
3、中文液晶显示所称量的物品重量,同时还可显示物品的名称,数量,单价,金额和所有物品的总金额。
4、具有去皮功能和金额累加计算功能。
5、当物品重量超过电子秤量程,即过载情况或者是物品重量小于A/D转换器所能转换的最小精度,即欠量程的时候,具有超重报警功能。
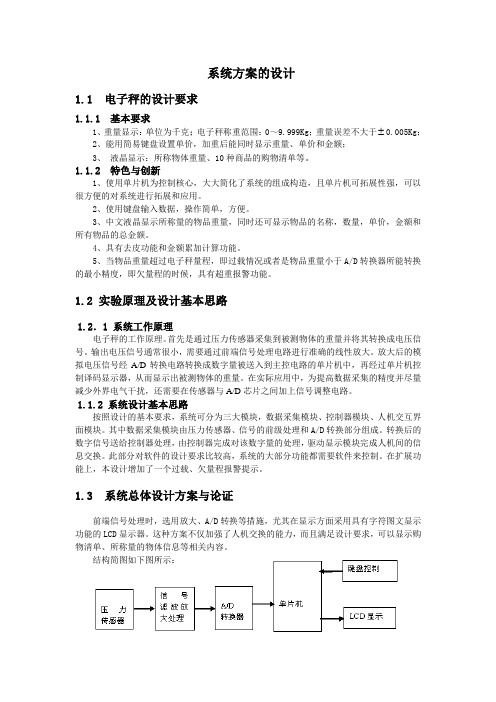
1.2 实验原理及设计基本思路1.2.1 系统工作原理电子秤的工作原理。
首先是通过压力传感器采集到被测物体的重量并将其转换成电压信号。
输出电压信号通常很小,需要通过前端信号处理电路进行准确的线性放大。
放大后的模拟电压信号经A/D转换电路转换成数字量被送入到主控电路的单片机中,再经过单片机控制译码显示器,从而显示出被测物体的重量。
在实际应用中,为提高数据采集的精度并尽量减少外界电气干扰,还需要在传感器与A/D芯片之间加上信号调整电路。
1.1.2 系统设计基本思路按照设计的基本要求,系统可分为三大模块,数据采集模块、控制器模块、人机交互界面模块。
其中数据采集模块由压力传感器、信号的前级处理和A/D转换部分组成。
转换后的数字信号送给控制器处理,由控制器完成对该数字量的处理,驱动显示模块完成人机间的信息交换。
此部分对软件的设计要求比较高,系统的大部分功能都需要软件来控制。
在扩展功能上,本设计增加了一个过载、欠量程报警提示。
1.3 系统总体设计方案与论证前端信号处理时,选用放大、A/D转换等措施,尤其在显示方面采用具有字符图文显示功能的LCD显示器。
电子称系统设计报告
电子称系统设计报告1. 引言本设计报告旨在介绍一种电子称系统的设计方案。
该电子称系统可广泛应用于家庭、商业和工业等领域,能准确测量物体的重量,并提供便捷的数据处理和显示功能。
本设计报告将详细介绍该电子称系统的硬件设备、软件设计和系统工作流程。
2. 系统硬件设计2.1 感应器电子称系统的核心是感应器,它负责测量物体的重量。
我们采用压力传感器作为感应器,其原理是利用物体对弹性体的压缩程度与重量成正比。
通过压力传感器的输出电压,我们可以获取物体的重量数据。
2.2 控制器控制器是电子称系统的处理器,负责接收感应器的数据,并进行数据处理和计算。
我们选择了高性能的单片机作为控制器,它可以快速处理大量的数据,并具备较强的计算和存储能力。
2.3 显示器为了方便用户查看测量结果,我们在电子称系统中添加了液晶显示器。
显示器能够实时显示物体的重量,并提供简洁清晰的用户界面。
2.4 电源电子称系统需要稳定的电源供给,我们采用直流电源适配器作为电源设备。
适配器能够为系统提供稳定的电压和电流,并保证系统正常运行。
3. 系统软件设计3.1 数据采集通过控制器与感应器的连接,我们可以实时获得感应器的数据。
数据采集模块负责将感应器的模拟信号转换为数字信号,并传输给控制器进行处理。
3.2 数据处理控制器接收到感应器的数据后,通过数据处理模块对数据进行滤波和校准,确保测量结果的准确性和稳定性。
处理后的数据将被储存在内存中,供后续的数据显示和存储使用。
3.3 数据显示通过液晶显示器,用户可以方便地查看测量结果。
显示模块将内存中储存的数据转换为可视化的数字显示,并显示在屏幕上。
用户可以轻松地读取测量结果,并进行相关操作。
3.4 数据存储为了方便用户将测量结果进行记录和分析,我们在电子称系统中添加了数据存储功能。
存储模块可以将测量数据保存在内部存储器或外部存储器,用户可以根据需要选择存储位置,并随时导出数据进行分析和处理。
4. 系统工作流程1. 用户将待测物体放置在电子称上;2. 感应器感知物体的压力变化,并将模拟信号传输给控制器;3. 控制器接收到模拟信号后,将其转换为数字信号,并进行滤波和校准处理;4. 处理后的数据被存储在内存中,并发送给显示器进行实时显示;5. 用户可以通过液晶显示器读取测量结果,并进行相关操作;6. 用户可以选择将测量数据保存在内部存储器或外部存储器;7. 用户可以随时导出存储的数据进行分析和处理。
电子秤毕业设计

电子秤毕业设计一、引言在当今社会,电子秤作为一种重要的测量工具,广泛应用于商业、工业、农业以及日常生活等各个领域。
其高精度、快速响应和便捷操作的特点,使得它成为了不可或缺的设备。
本次毕业设计旨在设计一款功能完善、性能可靠的电子秤。
二、设计目标与要求(一)精度要求能够准确测量物体的重量,精度达到 01g 以内,满足一般商业和工业应用的需求。
(二)量程范围设计量程为 0 10kg,以适应常见物体的称重需求。
(三)显示与操作配备清晰直观的液晶显示屏,操作按键简单易懂,方便用户进行称重、去皮、单位转换等操作。
(四)稳定性与可靠性在不同环境条件下(如温度、湿度变化)能够保持稳定的测量性能,具备良好的抗干扰能力,长时间使用不易出现故障。
三、系统总体设计(一)硬件设计1、传感器选择选用高精度的电阻应变式传感器,其具有精度高、稳定性好、线性度优良等特点。
2、信号调理电路将传感器输出的微弱信号进行放大、滤波和模数转换,以获得准确的数字信号。
3、微控制器采用主流的单片机作为控制核心,负责处理传感器数据、控制显示和执行操作逻辑。
4、电源模块提供稳定的电源供应,确保系统正常工作。
(二)软件设计1、编程语言选择 C 语言进行编程,具有高效、灵活和可移植性强的优点。
2、算法实现采用均值滤波算法对采集的重量数据进行处理,提高测量精度;通过线性拟合算法对传感器的输出特性进行校准,保证测量的准确性。
四、硬件电路设计(一)传感器接口电路设计合适的接口电路,实现传感器与信号调理电路的连接,确保信号传输的稳定性和准确性。
(二)信号放大与滤波电路采用运算放大器和无源滤波器构建放大与滤波电路,将传感器输出的微弱信号放大到合适的幅度,并去除噪声干扰。
(三)模数转换电路选用高精度的 ADC 芯片,将模拟信号转换为数字信号,供单片机处理。
(四)单片机最小系统包括单片机芯片、晶振电路、复位电路等,为单片机的正常运行提供必要的条件。
(五)显示与按键电路使用液晶显示屏显示重量、单位等信息,通过按键实现操作功能。
电子秤毕业设计

电子秤毕业设计随着科技的不断发展,电子秤作为一种现代化的测量工具,广泛应用于各个领域。
本文将介绍一个基于微控制器的电子秤毕业设计方案,该设计利用先进的技术和创新的思路,为电子秤的制作带来了新的可能性。
设计方案:1. 系统框架:本设计采用基于单片机的电子秤系统。
系统由传感器模块、信号处理模块和显示模块组成。
传感器模块用于检测物体的重量,信号处理模块负责采集和处理传感器输出的数据,显示模块则将结果以数字形式显示在屏幕上。
2. 传感器选择:为了提高测量的准确性和稳定性,本设计选用了高精度的称重传感器。
传感器的灵敏度和响应速度都经过精心调试,确保能够满足不同重量范围的测量需求。
3. 信号处理:在信号处理模块中,我们使用了一款性能优秀的微控制器作为核心处理器。
微控制器能够实现数据的快速采集和处理,并通过内部的算法计算出准确的重量数值。
同时,为了增强系统的稳定性,我们还加入了温度补偿和线性校正等功能。
4. 显示模块:为了提升用户体验,显示模块采用了高清液晶显示屏。
屏幕显示清晰,数字大小合适,用户可以直观地看到测量结果。
此外,显示模块还设计了简洁易懂的界面,方便用户进行操作和设置。
5. 功能扩展:除了基本的称重功能,本设计还增加了一些实用的功能。
比如,用户可以选择不同的单位显示,还可以设置零点、校准等操作。
同时,系统还提供了记录、存储和传输数据的功能,方便用户对测量结果进行管理和分析。
总结:通过以上设计方案,我们成功实现了一款功能完善、性能优越的电子秤系统。
该系统不仅具有高精度、稳定性好等优点,而且外观简约,使用方便。
未来,我们将进一步完善该设计,结合互联网和智能技术,为用户提供更加便捷、智能的电子秤产品。
愿本设计能够为电子秤行业的发展带来新的活力和机遇。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MI n , AO Ga g HAN Z e - u W EN Xin c a h n y , a-ho
;h e eg c acl eth p cc qimn rei epoui . a, vg oe; t t s a b i lmet r tar ueet ofrir r co A t i m t a h d i n s ay e a i e r s tz d tn t g n s n l f l l i s
!
;ipoe etb e e x e m n a . m r m n a d n h p r et dt y ss o t e i a a l
Ke r : na i i hi y wo ds Dy m c we g ng; c r c Ef c e y; Ac u a y; f i nc ATm e a1 i g 28
÷ 了影响系统精度和效率的一些因素。 析 试验结果表明该设计可以基本满足化肥生产的实际 求。 要 最后结 ÷ 合 试验数 据给 出一 些改进 措施 。 ?
; : 关键Fra bibliotek : 动态称重 ; ; 精度 效率; T e a 2 A m g l8
:
【 src】Truhterta n yi adep r n x lnsmekytcnl i hc a Abtat hog oei l a s n xei toepa o e h o ge w i ws h c al s me t i e o s h
;
‘ .… -… ・ …. …・ …- …- … ・… -… .… . …. …. … ・… .… - …. …・ … -… ・… ・… ・ …・ … ・… ・… ・… ・… ・ …・ … ・… ・… ・… ・ …. …- …. … -… .… .… . …. …. … ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ●
; 【 要】 摘 通过理论分析并结合试验的方式, 阐述了定量包装秤 系统设计 中要解决精度和效率 问 ; 题 所 涉及的关键技术。首先对 系统进行数 学建模分析 ,结合农用化肥生产和 包装要求,给出了一种基于 ? : V A R单片机和三级流速控制的农用化肥 电子定量 包装秤 系统的设计方案。然后通过大量实验 , 具体分 i
第3 期 2 1 年 3月 01
文章编号 :0 13 9 (0 )3 0 2 — 3 10 — 9 7 2 1 0 — 0 5 0 1
机 械 设 计 与 制 造
Ma h n r De i n c iey sg & Ma u a t r n f cu e
电子定量 包装秤 系统设计
缪 刚 韩震 宇 温显超 ( 四川 大学 制 造科学及 工程 学院 , 成都 60 6 ) 10 5
:i o e eqatav ak gsa yt e g o eoe peio de c ny it h n l di t u it e ci cl ss m ds n t cm vr r s na f i c. r , ei v v n h n ti p n e e i o ci n f e Fst i ÷s t a e ac oe n a s, o b e i gi l r rle poutnad akg gr y e m t m i m dl g l i cm i dwt ar u u f ti r r c o c ai -; sm h t a l i a ys n n h c ta ei d i n p l z n e ;qi m n , vsa o a do V i oot l r n ecnr rear-hmc rle u e et g e w bs nA R mc cnr l dt ot lft e go ce i f ti r r s i f l e r oe a h oo h l a e i s? z :qatav akn c ee c oi ss m ds .n e a en m e p r et adt l u i i p i sa l t n yt ei A dt n alg u bro e e m n , e i d: n t e c g l er c e t n g h r f x i s ae ÷aa s eip t s m acr yade c nyo m e ats xeiet sl hw ÷ nl i o t m a s t ua i c s eo t c rEp r n r u s o y sf h c o ye c c n f e f o f hf o. f i m a e ts l
( c ol f n fc r gS i c n n ier g Sc unU ies yC e g u6 6 , hn ) Sh o o uat i ce e dE gn ei ,i a nvri , hn d 0 5 C ia Ma un n a n h t 1 0
, ‘… ‘ … ・ ・… ‘ ‘ ‘ … ‘ ・… ・… ・ ・…‘ ・…‘ ‘ ’ … ‘ ・… ・… ・ ・…‘ ・…‘ ‘ ‘ … … ‘ 。 ‘ 。 … … ‘ ・… ・… ・ ・ ・… ・… ・… ・ ・ ・…’ ・…’ ・… ’ … ‘ ・… ・ ・…‘ ・… ‘ 。 … ‘ ・… ・… ・ ・…’ ・… ・… ・…‘ ・…‘ ・…‘ ‘ ‘ ’ … ‘ ・… ・… ・… ・ ,