激光干涉仪曲率半径测量原理
激光干涉仪的原理
激光干涉仪的原理
激光干涉仪的工作原理主要基于试验光线和参考光线间的相干干涉现象。
通过干涉方式,可以直接或间接地测定物质的光学性质和几何参数,如折射率、厚度、温度、压力、振动、应力等。
首先,由激光源发出的激光经过分光器被分成两束。
一束作为参考光定向传播,另一束作为试验光无规则传播。
由于试验光经过物质介质后,其相位会发生改变,而参考光的相位则保持不变。
当参考光和试验光在相干条件下汇聚到一点时,两束光波的相位差就会在图像中形成干涉暗纹和亮纹。
干涉图案由于光波的干扰而产生。
当两束光的光程差为整数倍的波长时,干涉图案呈现亮纹。
当光程差为半整数倍的波长时,干涉图案呈现暗纹。
通过观察和分析这些干涉纹,可以精确地测定物质的光学性质和几何参数。
激光干涉仪的优点在于其测量的精度和灵敏度都非常高。
可以实现纳米级甚至皮米级的测量精度,广泛适用于国防科技、生命科学、物理化学、微电子制造等各个科技领域。
要点: 1) 激光干涉仪通过激光干涉的原理来测定物质的光学性质和几何参数;2) 激光干涉仪的测量精度和灵敏度都非常高,可达到纳米级甚至皮米级。
双频激光干涉仪测量
双频激光干涉仪测量激光干涉仪测长原理典型的激光干涉仪由激光器L、偏振分光镜PBS测量反射镜M参考反射镜R、光电检测器D检偏器P和三个入14波片Q1、Q2和Q3组成。
激光为线偏振光,经偏振分光镜分为E1和E2两线偏振光。
当两干涉臂中入/4波片快轴(或慢轴)与X轴夹角相等且为45 度时,两束光通过入/4波片后均成为圆偏振光,反射后再次通过入/4波片,又转换为线偏振光,但其振动方向相对原振动方向旋转了90度,且由于两干涉臂光程产生了相位差0 ,根据公式:0 =2 0 = 0 =4n L/ 入式中:入为激光波长,干涉光路的作用是把位移L转变为合成光振动方向的旋转角0,进而转换成光电信号的相位0,信号处理器的作用就是测量出0 ,从而计算出位移L。
垂直度的测量工具在一台机器施工实例:多轴系统双频激光干涉仪的工作原理双频激光干涉仪其双频激光测量系统由氦氖双频遥置激光干涉仪和电子实时分解系统所组成。
它具有以下优点:稳定性好,抗干扰能力强,可在较快的位移速度下测量较大的距离,使用范围广,使用方便,测量精度高。
基本原理:如图11-2 所示,激光双频干涉仪的氦氖激光管,在外加直流轴向磁场的作用下,产生塞曼效应,将激光分成频率为fl和f2,旋向相反的两圆偏振光,经入/4波片变为线偏振光。
调整入/4玻片的旋转角度,使fl 和f2 的振动平面相互垂直,以互垂直,以作激光干涉图11-2 双频激光干涉仪的工作原理图1.激光管2.入/4波片3.参考分光镜4.偏振分光棱境5.基准锥体棱镜6.移动测量棱体7.10.12. 检偏振镜8.9.11. 光电管13. 光电调制器仪的光源。
当两个线偏振光经过参考分光镜3时(见图11-2),大部分则由偏振分光棱境4 分成两束。
偏振面垂直入射面的f2 全反射到与分光镜固定在一起的基准锥体棱镜上;偏振面在入射面内的fl 则全部通过而射到移动测量棱体6 上。
由这两个锥体棱镜反射回来的光束在偏振分光镜上合并,并在检偏振镜上混频。
双频激光干涉仪测量
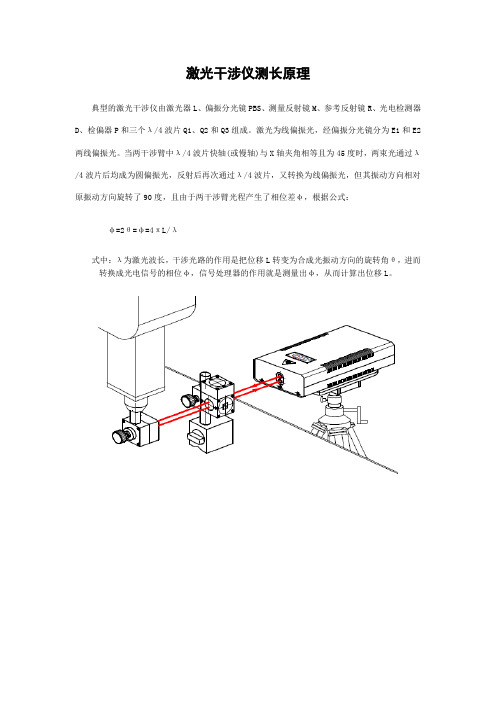
激光干涉仪测长原理典型的激光干涉仪由激光器L、偏振分光镜PBS、测量反射镜M、参考反射镜R、光电检测器D、检偏器P和三个λ/4波片Q1、Q2和Q3组成。
激光为线偏振光,经偏振分光镜分为E1和E2两线偏振光。
当两干涉臂中λ/4波片快轴(或慢轴)与X轴夹角相等且为45度时,两束光通过λ/4波片后均成为圆偏振光,反射后再次通过λ/4波片,又转换为线偏振光,但其振动方向相对原振动方向旋转了90度,且由于两干涉臂光程产生了相位差φ,根据公式:φ=2θ=φ=4πL/λ式中:λ为激光波长,干涉光路的作用是把位移L转变为合成光振动方向的旋转角θ,进而转换成光电信号的相位φ,信号处理器的作用就是测量出φ,从而计算出位移L。
垂直度的测量工具在一台机器施工实例:多轴系统双频激光干涉仪的工作原理双频激光干涉仪其双频激光测量系统由氦氖双频遥置激光干涉仪和电子实时分解系统所组成。
它具有以下优点:稳定性好,抗干扰能力强,可在较快的位移速度下测量较大的距离,使用范围广,使用方便,测量精度高。
基本原理:如图11-2所示,激光双频干涉仪的氦氖激光管,在外加直流轴向磁场的作用下,产生塞曼效应,将激光分成频率为f1和f2,旋向相反的两圆偏振光,经λ/4波片变为线偏振光。
调整λ/4玻片的旋转角度,使f l和f2的振动平面相互垂直,以互垂直,以作激光干涉图11-2 双频激光干涉仪的工作原理图1.激光管2.λ/4波片3. 参考分光镜4. 偏振分光棱境5. 基准锥体棱镜6.移动测量棱体7.10.12.检偏振镜8.9.11.光电管13.光电调制器仪的光源。
当两个线偏振光经过参考分光镜3时(见图11-2),大部分则由偏振分光棱境4分成两束。
偏振面垂直入射面的f2全反射到与分光镜固定在一起的基准锥体棱镜上;偏振面在入射面内的f l则全部通过而射到移动测量棱体6上。
由这两个锥体棱镜反射回来的光束在偏振分光镜上合并,并在检偏振镜上混频。
当移动锥体棱镜时,由于多普勒效应,f1变成f1+△f,因而光电元件8所得到的信号是(f1+△f)-f2。
激光干涉仪测量方法
或 =∑
某一目标位置的反向偏差为 ,即
= ↑- ↓
沿轴线或绕轴线的各目标位置的反
在某一目标位置的单向定位标准不确定度的估算值为 ↑ 或 ↓即
↑=
∑(
)
()
或
=
(
∑
)
(
)
某一目标位置的单向重复定位精度为 ↑或 ↓,即
↑ = 4 ↑或 ↓ = 4 ↓
( 3) 确定采集移动方式采集数据方式有两种:一种是线性循环
采集方法,另一种是线性多阶梯循环方法。GB17421 评定标准中采用 线性循环采集方法。测量移动方式: 采用沿着机床轴线快速移动,分 别对每个目标位置从正负两个方向上重复移动五次测量出每个目标 位置偏差,即运动部件达到实际位置减去目标位置之差。
(图2) ( 2) 确定测量目标位置根据GB17421 评定标准中规定,机床规 格小1 000mm 取不少于10 个测量目标位置,大于1 000mm 测量目标 位置点数适当增加,一般目标值取整数,但是我们建议在目标值整数 后面加上三位小数。主要考虑机床滚珠丝杠的导程及编码器的节距所 产生的周期误差,同时也考虑机床全程上各目标位置上得到充分地采 集。
沿轴线或绕轴线的任一位置 的重复定位精度的最大值。即
R↑ = max [ ↑],R↓ = max [ ↓]
R = max [ ] 轴线单向定位精度A↑或A↓,即 A↑ = max [ + 2 ↑] - min [ - 2 ↑] 或 A↓ = max [ ↓ + 2 ↓] - min [ ↓ - 2 ↓] 轴线双向定位精度A,即 A = max [ ↑ + 2 ↑; ↓ + 2 ↓] - min[ ↑ - 2 ↑;
( 4) 评定方法采用双向计算方法进行评定机床的位置精度。目
第四部分激光测量系统3激光干涉仪原理
光电脉冲编码器的结构
第一部分 光电编码器
旋转编码器工作原理
光电码盘随被测轴一起转动,在光源的照射下, 透过光电码盘和光拦板形成忽明忽暗的光信号, 光敏元件把此光信号转换成电信号a、b、z, 通过信号处理装置的整形、放大等处理后输出 如图所示的6项A、B、C 和取反信号。
输出信号的作用及其处理 • A、B 两相的作用
U kUs sin 机
防止气隙磁通畸变加上相互垂直的绕组
第二部分 转变压器
旋转变压器工作原理
分解器绕组的结构保证了定子与转子之间的气隙磁通呈正、余弦规律 分布。因此,当转子旋转时,转子绕组内产生感应电势随转子偏转角 θ 机呈正弦规律变化。 U kU s sin 机 或 U kUc cos 机 即: 其中,Us ,Uc 为定子正弦、余弦绕组上的激磁电压,k为变压比。
第五部分 陀螺仪测角
章动:三自由度陀螺仪以角速度ω绕自转轴转动,在受到外 力矩作用下,自转轴将发生偏斜运动—称为章动。
此时,其进动角速度α= -Μ/(λH)sinλt
β =Μ /(λ H)(1-cosλ t)
λ=H/A A为陀螺仪绕X轴(赤道的)的转动惯量
当角速度ω足够大时,角动量矩H很大,进动角速度Ω、α、 β可以忽略比不计,这就是三自由度陀螺仪的定轴性。 定轴性的特点使得装有三自由度陀螺仪的惯性平台有了一个参 考轴。无论惯性平台本身如何摆动摇晃,这个参考轴是不变的, 我们可以利用位移传感器测量惯性平台与定轴的角度,得出平 台本身的各种倾角,来控制平台的姿态。
旋转变压器的应用 鉴相方式
在旋转变压器定子的两相正交绕组上分别加上幅值相等、频率相同的 正弦、余弦激磁电压 U s U m sin t , U c U m cost 转子旋转后,两个激磁电压 在转子绕组中产生的感应电压线性叠加得 总感应电压为:
激光干涉仪的基本原理
激光干涉仪的基本原理激光干涉仪是一种高精度的测量仪器,它可以用来测量物体的形状、表面质量、位置以及运动状态等。
在工业、航空航天、医学等领域都有广泛的应用。
本文将介绍激光干涉仪的基本原理。
1. 激光的特性首先,我们需要了解激光的特性。
激光是一种单色性和相干性极高的光波。
其波长稳定,方向一致,段差小,能够形成高质量的平行光束。
这些特性使得激光在干涉测量中有着很大的优势。
2. 干涉原理干涉现象是指两束光波在空气中相遇时,由于相位差的存在,会发生一系列的干涉现象。
常见的干涉现象有等厚干涉、等附加厚度干涉、菲涅尔双棱镜干涉、迈克尔逊干涉等。
在迈克尔逊干涉中,激光光束从分束器射出,经过反射镜反射后再次聚焦于分束器,形成一种干涉图形。
在干涉图形中,可以通过测量干涉带的位移、亮度等来计算物体的形态、位置、偏移量等信息。
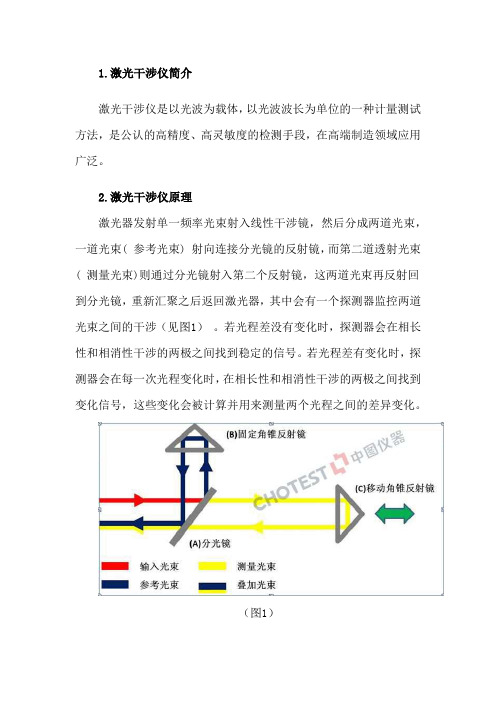
3. 激光干涉仪的工作原理激光干涉仪是一种基于干涉原理的测量仪器。
它包括激光源、分束器、反射镜、检测器等部分。
当激光从激光源经过分束器后,会被分为两束光束。
其中一束光束经过反射镜后返回分束器,与另一束光束发生干涉。
通过调整反射镜的位置,可以改变干涉光束之间的相位差,从而形成干涉图形。
检测器会将干涉图形转化为电信号,通过电路处理后输出测量结果。
4. 激光干涉仪的优点和应用激光干涉仪有着高精度、高稳定性、非接触性测量等一系列优点。
它可以被应用于各种领域,例如:在机械加工领域,激光干涉仪可以用来测量机床导轨、定位板、工件表面形态等参数,从而提高加工质量和效率。
在医学领域,激光干涉仪可以用来测量角膜曲率、晶体位移等参数,从而用于诊断和治疗眼科疾病。
在航空航天领域,激光干涉仪可以用来测量航天器的姿态、运动状态等参数,从而实现精确的导航和控制。
总之,激光干涉仪是一种重要的测量仪器,具有广泛的应用前景。
了解其基本原理可以帮助我们更好地理解其工作原理和优点,从而更好地应用于实际应用中。
迈克尔逊激光干涉仪测量原理

在实际测量中,都采用干涉条纹计数法。测量开始时使计数器置零(使N1 = 0),对应于被测长度,计数器计得的干涉条纹数为N = N2 。
需要指出的是,当测量是在严格的标准状态下进行,即n、λ0、Lm、Lc和被测长度或定位长度L在整个测量过程中完全保持不变时,可用公式(9-14)作为测量的基本公式。然而,在一切实际的测量中很难做到,为此,必须全面地计入在测量时间间隔(t2-t1)内。由于上述参数变化对测量结果所造成的影响,所以式(9-12)仅作为测量的基本公式。
对应的干涉条纹数为
(9-12)
显然N=N2+N1 (9-13)
其中
(9-14)
在要求进行高精度测量的场合,则需要全面地考虑测量时环境条件对标准状态偏离的影响,和在(t2-t1)测量时间内环境条件的变化(包括温度、湿度、气压、结构件的变形等)引起n、λ0、Lm、Lc 和L等参数变化对测量结果的影响。
则两束激光相互抵消,在观察屏P中心处出现暗条纹。
若将动反射镜M2 移动距离L到M 2 ,由于光束b光程的变化,观察屏P中心处的干涉条纹将出现明暗交替变化。显然,当M2移动λ/2距离时,干涉条纹就明暗交替变化一次。若在观察屏中心处记录下明暗交替变化的次数N,那么,就可测量出M2 移动到M 2 所经过的距离L,即
(9-11)
式中 Lm——测量臂长度(μ
在时刻t2 ,测量结束。动镜M2移过被测长度L(或定位距离)后处于 位置。此时光程差为
在精密长度计量或电子精密机械设备定位技术中,迈克尔逊激光干涉仪是常用的一种型式,其原理如图9-34所示。
由氦氖激光器发出的激光,经过准直透镜变为一束平行光,投射到半透明半反射镜B上,光束被分成两路。一路反射光a被反射到固定反射镜M1 ,另一路反射光b射向可动反射镜M2 。M1和M2 又分别把两束光反射回半透明半反射镜B表面会合,由于B到M1 和M2 的距离不相等,两束光a和b的传播就产生了光程差,如果在P处设置一观察屏,两束光就在观察屏P上叠加产生干涉,可以看到明暗相间的干涉条纹。
迈克尔逊激光干涉仪测量原理(Me...
迈克尔逊激光干涉仪测量原理(Measurement principle ofMichelson laser interferometer)Laser is a new light source in early 60s, the laser is emitted from the laser light, it emits light and light, with high brightness, specific direction, monochromaticity and coherence. Since the advent of He Ne lasers, great progress has been made in the technique of measuring length by means of laser interferometry. It has been widely used in precision length measurement (including scale, grating test, precision ball screw dynamic measurement, vibration measurement etc.), precision machine tool control and high precision electronic precision machinery and equipment, precision positioning etc..In the precise length measurement or electronic precision equipment positioning technology, the Michelson laser interferometer is a commonly used type, and its principle is shown in figure 9-34.A laser pumped by a helium neon laser is transformed into a collimated beam by a collimated lens and projected onto the translucent half mirror B. The beam is split into two paths. The reflected light a is reflected to the fixed mirror M1, and the other reflected lightB is sent to the movable mirror M2. M1 and M2 are the two beam of light reflected back to the translucent half mirror surface of B because B is not equal to the rendezvous, M1 and M2 communication distance, a and B light beams have optical path difference, if a viewing screen set at P, the two beams will be added to the observation screen on P interference you can see the white light interference fringes.Two beams interference light meet on the viewing screen at the center of P, the result of interfering light beams, is strengthening or weakening or offset each other each other, by the two beam optical path difference L (equal to the light path decided through the geometric distance and refractive index of the product, the air refractive index is approximately equal to 1). As can be seen from Fig. 9-23, the optical path difference between the two beams of a and B reaches the center of the P center of the observation screenL = 2 (BM2 - BM1) = 2 (Lm-Lc) (9-6)When the optical path difference L is an integer multiple of the laser wavelength lambda, i.e.Delta L = N lambda (N is positive integer) (9-7)The two laser beams reinforce each other, and a bright fringe appears at the center of the P screen.When the optical path difference L is odd times of the laser half wavelength, that is(9-8)The two lasers cancel each other, and dark stripes appear at the center of the P screen.If the moving mirror M2 is moved from L to M 2, the interference fringes of the center of the screen P will change alternately due to the change of the B optical path of the beam. Obviously,when the M2 moves lambda /2 distance, the interference fringes change alternately. If you record the number of alternating changes in N at the center of the screen, then you can measure the distance M2 moves through to M 2, that is, L(9-9)This is the formula for measuring the length of the Michelson laser interferometer.For an actual interferometer, if the medium is air, the upper is rewritten as(9-10)Type L - measured length (m), that is, the moving distance of the moving mirror M2 relative to BN - refractive index of air;N - observe the number of changes in the light and shade of the interference fringes on the screen.In a practical Michelson type laser interferometer length measuring instrument, this is the way of measurement:At the moment T1, the reference mirror (fixed mirror), the M1, and the moving mirror M2 are at the beginning of the measurement, as shown in figure 9-23. At this time, the initial optical path difference is 2 (Lm - Lc), and the corresponding fringe number is(9-11)Type Lm - measuring arm length (mu m);Lc - reference arm length (mu m).At time T2, the measurement is over. The moving mirror M2 moves at the measured length L (or the positioning distance) and is in position. The optical path difference isThe number of fringes corresponding to(9-12)Obviously, N=N2+N1 (9-13)among(9-14)In practical measurement, interference fringe counting method is adopted. At the start of the measurement, the counter is set to zero (N1 = 0), corresponding to the measured length, and the number of interference fringes counted by the counter is N = N2.It is necessary to point out that when the measurement is carried out in the standard strictly, namely n, Lm, Lc and lambda 0, measured the length or length of L positioning completely unchanged in the whole measurement process, usinga formula (9-14) as the basic formula of measurement. However, it is difficult to do so in all practical measurements and must be fully included in the measurement interval (t2-t1) for this purpose. Because of the influence of the change of the above parameters on the measurement results, formula (9-12) is only used as the basic formula of measurement.High precision measurement in the need to comprehensively consider the influence of environmental conditions on the measurement standard deviation (t2-t1), and the change of environmental conditions within the measurement time (including temperature, humidity, air pressure, deformation structures etc.) caused by the change of N, Lm, Lc, lambda 0 and L the parameters of measurement results.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
激光干涉仪曲率半径测量原理
激光干涉仪是一种用来检测设备运动精度的仪器。
其曲率半径测量原理是通过激光干涉仪的光束,经扩束准直后由分光镜分为两路,并分别从固定反射镜和可动反射镜反射回来会合在分光镜上而产生干涉条纹。
当可动反射镜移动时,干涉条纹的光强变化由接受器中的光电转换元件和电子线路等转换为电脉冲信号,经整形、放大后输入可逆计数器计算出总脉冲数,再由电子计算机按计算式计算出曲率半径。