隐式曲面重建方法研究
无人机倾斜摄影三维建模技术研究现状及展望
2097-3012(2023)01-0041-08 Journal of Spatio-temporal Information 时空信息学报收稿日期: 2023-01-03;修订日期: 2023-04-14 基金项目: 国家自然科学基金项目(42201474)作者简介: 刘欣怡,研究方向为点云影像联合处理、实景三维建模等。
E-mail:*****************.cn无人机倾斜摄影三维建模技术研究现状及展望刘欣怡,张永军,范伟伟,王森援,岳冬冬,刘梓航,贾琛,景慧莹,钟佳辰武汉大学 遥感信息工程学院,武汉 430079摘 要:无人机倾斜摄影从航空平台多视角同步采集影像,可通过倾斜摄影测量,三维建模等技术生成真实的三维模型,是目前地形级到城市级实景三维模型重建最主要的技术手段之一。
本文总结归纳了目前无人机倾斜摄影三维建模过程中的关键技术,重点介绍了三维场景重建和倾斜摄影三角网模型的语义提取、单体化、实体化处理等技术方法及研究现状,指出了目前无人机倾斜摄影三维建模技术仍存在的问题,并从无人机路径规划、数据获取、建模技术、模型表达四方面对该领域潜在的发展趋势和研究方向进行了分析与展望。
关键词:无人机;倾斜摄影测量;实景三维中国;三维建模;实体化引用格式:刘欣怡, 张永军, 范伟伟, 王森援, 岳冬冬, 刘梓航, 贾琛, 景慧莹, 钟佳辰. 2023. 无人机倾斜摄影三维建模技术研究现状及展望. 时空信息学报, 30(1): 41-48Liu X Y, Zhang Y J, Fan W W, Wang S Y, Yue D D, Liu Z H, Jia C, Jing H Y, Zhong J C. 2023. 3D modeling based on UAV oblique photogrammetry: Research status and prospect. Journal of Spatio-temporal Information, 30(1): 41-48, doi: 10.20117/j.jsti.2023010061 引 言实景三维是对人类生产、生活、生态空间进行真实、立体、时序化反映和表达的数字虚拟空间,是国家新型基础设施建设的重要组成部分。
曲面重建技术
曲面重建技术
曲面重建技术是通过对点云数据进行处理和分析,从而重建出曲面模型的一种技术。
常见的曲面重建技术包括以下几种:
1. Delaunay三角网格:该方法将点云数据转换为三角网格,
通过最小化三角形的边长和最大化角度来生成平滑的曲面。
这种方法适用于点云密度较高且曲面比较平滑的场景。
2. 体素网格(Voxel Grid):通过将点云数据划分为一系列小的
立方体单元,然后分析每个单元内的点云分布情况,从而确定曲面的形状。
该方法适用于处理点云分布不均匀且曲面存在较大变化的情况。
3. 法向量估计:利用点云数据中的法向量信息来推测曲面的形状。
通过计算每个点的邻域内点的平均法向量,可以得到点云数据的平滑曲面。
该方法对于点云数据中存在噪音和不完整的情况具有较好的鲁棒性。
4. 基于隐函数的方法:用函数来表示曲面,在点云数据的基础上拟合出一个适合曲面的隐函数,并使用隐函数的等值面来表示曲面模型。
这种方法可以较好地处理点云数据中存在噪音和不完整的情况,但对于大规模点云数据的处理较为复杂。
以上仅是一些常见的曲面重建技术,根据具体应用场景和需求,可以选择合适的方法进行曲面重建。
大规模孔洞点云的快速重建算法研究
基 于均匀空间划分的顶点聚类算法绘制质量不高的缺点 , 在构
要 的过程。散乱点云数据一般 由三维扫描仪扫描获得 , 由于物 体表面反射性 、 接触困难 、 测量角度等 因素的影 响, 点云数据常
含有孔洞 。为了不影 响模 型的后续处理 , 提高建模质量 , 国内 外许 多学 者对 孔 洞修 补算 法进 行 了研 究 , 要有 曲面重 建 主
建八叉树时 , 采用的是 自顶向下 的适应性八叉树划分。该划分
方式适应图元 的空 间分布 , 即在图元越密集 的空间区域 , 空 其 间划分也越精细 , 从而能够更好地反映原模型 的细节分 布。 首先将八叉树 的根节点初始化为场景的包 围盒 , 然后将顶 点依次插入该 根节点 。如果一个节点 的顶点数量超过预定义
T AN Ja —e ,L U — i ,GU o g I in l i I Xu r n a AN Y n
( oeeo fr t nE gnei C ptl o l n i , ei 00 8 Clg I omai n i r g, ai r i t B in 10 4 ) l fn o e n a N ma U  ̄m y jg
前 j 曲面重建 中 和 曲面重建 后 -] 、 8的修补算 法。曲面 重建前的点云修补主要是提取点云的缺陷区域 , 然后构造曲面
Ab t a t F rp i t lu sw t oe f n fu d i r cie, e eo e ats ra e r c n tu t n ag rtm whc o l sr c : o on o d i h lso e n n p a t c h t o c d v lp d afs u fc e o s ci l oi r o h , ih c ud r p i i c mp ee p itd t .F rt ii e c t r d p i t aa a a t e i t p c i er e h n i tr o ae on aa e ar n o l t on a a is ,dvd d s at e o n t d pi no s a e w t o t ,T e ne p ltd p itd t e d v h e b o r ̄ t- n ir r h ,t g ti l i s r c q ain y a c a a - f e h ea c y o e mp i t u f e e u t .F n l ,i t d c d t oo t n lmeh d ih c u d ma eO oi c a o i al nr u e w p i a y o o to swhc o l k —
一种自动的非封闭曲面三维重建方法

一种自动的非封闭曲面三维重建方法温佩芝;宁如花;吴晓军;黄锦芳【摘要】To realize the non-closed surface reconstruction accurately, a threshold segmentation algorithm based on triangle perimeter which could be used to remove the enclosed spurious surface was proposed. The sampling points were selected from triangle perimeter, and the threshold was calculated automatically by comparing the Enclidean distance between sample points and input points. Thus the non-closed surface was obtained by threshold segmentation from enclosed surface. The experiments results showed that the proposed method had low complexity, high efficiency, and strong robustness. Moreover, it could remove the spurious surface but not affect the precision of original surface.%为了精确实现非封闭曲面的三维重建,提出一种基于曲面三角面片周长的阈值分割方法,首先计算泊松算法生成曲面的三角面片周长选取采样点,然后通过比较样本点与原始输入点之间的欧氏距离自动计算阈值对生成曲面进行分割.实验结果表明,该算法能准确有效地去除伪封闭曲面而不影响原生成曲面的精度,且算法复杂度低、时间效率高、鲁棒性强.【期刊名称】《计算机集成制造系统》【年(卷),期】2013(019)004【总页数】7页(P680-686)【关键词】泊松算法;三角面片;阈值;伪曲面;曲面分割【作者】温佩芝;宁如花;吴晓军;黄锦芳【作者单位】桂林电子科技大学计算机科学与工程学院,广西桂林541004【正文语种】中文【中图分类】TP390 引言随着三维扫描技术的日益发展,三维点云模型已大量应用于逆向工程[1-2]、计算机辅助设计(Computer Aided Design,CAD)[3]、机械制造、医学影像、虚拟现实和动漫等领域。
ct曲面重建方法

ct曲面重建方法一、CT曲面重建方法的基本概念。
1.1 CT曲面重建啊,那可是个相当厉害的技术。
简单来说呢,就是把CT扫描得到的一堆数据,通过特殊的方法,让它变成一个能直观看到的曲面图像。
就好比把一堆杂乱的零件,组装成一个精美的模型一样。
这可不是一件容易的事儿,得有点技术含量。
1.2 这技术就像是给医生一双透视眼,让他们能透过身体的重重阻碍,看到那些隐藏在里面的结构。
比如说,人体的血管啊,肠道啊,这些弯弯曲曲的东西,普通的CT图像可能看不太清楚,但是曲面重建就能把它们清晰地展现出来。
二、CT曲面重建的操作步骤。
2.1 首先呢,得有高质量的CT原始数据。
这就像盖房子得有好的砖头一样,数据不好,后面再怎么弄都白搭。
这原始数据就像是CT扫描机器的心血结晶,每一个数据点都可能影响最终的重建效果。
2.2 然后呢,就是要确定重建的路径。
这就好比是给汽车规划路线一样,你得知道从哪儿开始,沿着什么方向走。
在CT曲面重建里,就是要确定沿着哪个结构去重建曲面。
这可不能马虎,一旦路径选错了,那重建出来的图像可能就不是你想要的,就像南辕北辙一样,完全走偏了。
2.3 最后就是进行实际的重建操作啦。
这一步就像是厨师做菜的最后调味,各种参数的调整就像是放调料,放多放少都得恰到好处。
比如说重建的算法选择,就像选择做菜的方法,不同的算法会做出不同风格的“菜”,也就是不同效果的重建图像。
三、CT曲面重建方法的重要意义。
3.1 在医疗领域,这CT曲面重建那可是功不可没。
对于诊断疾病来说,就像一把金钥匙。
比如说,在诊断血管类疾病的时候,它能清晰地显示血管的狭窄、堵塞或者畸形。
这就像是给医生提供了一份详细的地图,让他们能够准确地找到病变的位置,对症下药。
要是没有这个技术,就像是盲人摸象,只能靠猜,那多不靠谱啊。
3.2 在医学研究方面,CT曲面重建也像是一个得力的助手。
研究人员可以通过它来观察人体内部结构的细微变化,这对于了解疾病的发展过程、探索新的治疗方法都有着至关重要的作用。
基于深度图像三维重建中三角面片划分算法研究
分类号:TP391 单位代码:10110学号:s********中 北 大 学硕 士 学 位 论 文基于深度图像的三维重建中三角面片划分算法的研究硕士研究生 高一宁指导教师 韩燮 教授学科专业 计算机应用技术2011年 5 月 20日图书分类号_________TP391____________________ 密级__ 非密 ___UDC________________________________________________________________硕 士 学 位 论 文基于深度图像的三维重建中三角面片划分算法的研究高一宁指导教师(姓名、职称) 韩燮 教授申请学位级别 工学硕士专业名称 计算机应用技术论文提交日期_______________________年______月______日_______________论文答辩日期_______________________年______月______日_______________学位授予日期_______________________年______月______日_______________论文评阅人__________________________________________________________答辩委员会主席______________________________________________________2011年 5 月 20 日原 创 性 声 明本人郑重声明:所呈交的学位论文,是本人在指导教师的指导下,独立进行研究所取得的成果。
除文中已经注明引用的内容外,本论文不包含其他个人或集体已经发表或撰写过的科研成果。
对本文的研究作出重要贡献的个人和集体,均已在文中以明确方式标明。
本声明的法律责任由本人承担。
论文作者签名: 日期:关于学位论文使用权的说明本人完全了解中北大学有关保管、使用学位论文的规定,其中包括:①学校有权保管、并向有关部门送交学位论文的原件与复印件;②学校可以采用影印、缩印或其它复制手段复制并保存学位论文;③学校可允许学位论文被查阅或借阅;④学校可以学术交流为目的,复制赠送和交换学位论文;⑤学校可以公布学位论文的全部或部分内容(保密学位论文在解密后遵守此规定)。
医学影像处理方法及其应用教程
医学影像处理方法及其应用教程医学影像处理是一种运用计算机科学和图像处理技术来处理医学图像以获取有用信息的方法。
随着医学影像技术的快速发展,影像处理在医学诊断、研究和治疗中的应用越来越广泛。
本文将介绍医学影像处理的基本方法及其在不同领域的应用。
一、医学影像处理方法1. 图像预处理图像预处理是医学影像处理的第一步,旨在优化图像质量,减少噪声和其他干扰因素。
常用的预处理方法包括:- 图像去噪:采用滤波算法去除图像中的噪声,如中值滤波、高斯滤波等。
- 图像增强:通过调整图像的对比度、亮度和色彩等参数来提高图像的可视化效果。
- 图像配准:将同一个患者在不同时间或不同成像设备上获得的图像进行空间上的对齐,以便进行比较和分析。
2. 特征提取特征提取是医学影像处理的关键步骤,目的是从图像中提取出有助于诊断和分析的有意义的信息。
常用的特征提取方法包括:- 边缘检测:检测图像中的边界,常用的边缘检测算法有Sobel、Canny等。
- 区域分割:将图像分割成不同的区域,以便进行单独的分析,常用的分割算法有阈值分割、区域生长等。
- 特征描述:提取图像中的纹理、形状、颜色等特征,常用的描述方法有Gabor滤波器、小波变换等。
3. 影像三维重建影像三维重建是将二维医学影像转化为三维模型的方法,可以更全面地呈现患者的解剖结构和病变信息。
常用的三维重建方法包括:- 体素匹配法:将二维图像堆叠起来,重建出一个三维体素矩阵,利用体素之间的相关关系进行插值。
- 隐式曲面重建:根据二维图像的边缘等特征,重建出一个连续的三维曲面模型。
- 基于纹理的重建:根据二维图像中的纹理信息,生成一个具有表面纹理的三维模型。
二、医学影像处理的应用1. 医学诊断医学影像处理在医学诊断中具有重要的应用价值。
通过对医学图像进行处理和分析,医生可以更准确地诊断疾病和评估治疗效果。
例如,利用影像处理方法可以检测肿瘤的位置、大小和形态,帮助医生制定更有效的治疗方案。
417三角网格上的代数曲面重建
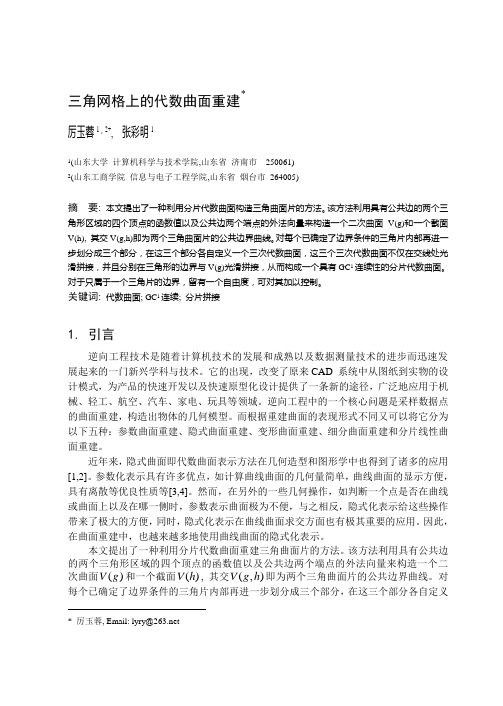
三角网格上的代数曲面重建厉玉蓉1,2+, 张彩明11(山东大学 计算机科学与技术学院,山东省 济南市 250061) 2(山东工商学院 信息与电子工程学院,山东省 烟台市 264005)摘 要: 本文提出了一种利用分片代数曲面构造三角曲面片的方法。
该方法利用具有公共边的两个三角形区域的四个顶点的函数值以及公共边两个端点的外法向量来构造一个二次曲面V(g)和一个截面V(h), 其交V(g,h)即为两个三角曲面片的公共边界曲线。
对每个已确定了边界条件的三角片内部再进一步划分成三个部分,在这三个部分各自定义一个三次代数曲面,这三个三次代数曲面不仅在交线处光滑拼接,并且分别在三角形的边界与V(g)光滑拼接,从而构成一个具有GC 1连续性的分片代数曲面。
对于只属于一个三角片的边界,留有一个自由度,可对其加以控制。
关键词: 代数曲面; GC 1连续; 分片拼接1. 引言逆向工程技术是随着计算机技术的发展和成熟以及数据测量技术的进步而迅速发展起来的一门新兴学科与技术。
它的出现,改变了原来CAD 系统中从图纸到实物的设计模式,为产品的快速开发以及快速原型化设计提供了一条新的途径,广泛地应用于机械、轻工、航空、汽车、家电、玩具等领城。
逆向工程中的一个核心问题是采样数据点的曲面重建,构造出物体的几何模型。
而根据重建曲面的表现形式不同又可以将它分为以下五种:参数曲面重建、隐式曲面重建、变形曲面重建、细分曲面重建和分片线性曲面重建。
近年来,隐式曲面即代数曲面表示方法在几何造型和图形学中也得到了诸多的应用[1,2]。
参数化表示具有许多优点,如计算曲线曲面的几何量简单,曲线曲面的显示方便,具有离散等优良性质等[3,4]。
然而,在另外的一些几何操作,如判断一个点是否在曲线或曲面上以及在哪一侧时,参数表示曲面极为不便,与之相反,隐式化表示给这些操作带来了极大的方便,同时,隐式化表示在曲线曲面求交方面也有极其重要的应用。
因此,在曲面重建中,也越来越多地使用曲线曲面的隐式化表示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
隐式曲面重建方法研究
文章通过研究逆向工程中的关键技术三维散乱点云曲面重建技术,对现有的隐式曲面重建方法进行了总结分析,比较各方法的优缺点,以便在实际应用中能根据不同的需求进行相应的选择,也为曲面重建技术的进一步研究提供了方向。
标签:逆向工程;散乱点云;隐式曲面重建
逆向工程(Reverse Engineering,RE)[1],主要是对已有实物的原型或模型进行三维扫描以获取点云数据,然后对点云数据进行曲面重建,在曲面重建结果的基础上进行分析和修改,重建出新产品的模型,最后通过先进的制造技术对其新产品进行生产制造。
逆向工程具有快速研发新产品的特性,其技术已在众多领域得到应用,如机械制造、现实虚拟仿真、3D游戏、3D打印、人体器官仿真等。
在逆向工程中,根据三维扫描设备获取的点云数据信息重建出三维物体模型表面的技术,称之为三维曲面重建技术,见图1。
图1 点云模型曲面重建
近年来,隐式曲面因其具备易于实现交、差、并等集合操作,能表示拓扑结构复杂的几何形体,对轻微的噪声不敏感等特点,使得隐式曲面造型技术受到了越来越多专家学者的重视和关注,并提出了一系列有效的隐式曲面重建算法。
1 RBF方法
Carr[2]等人将RBF函数插值方法应用于点云数据的曲面重建中,该类算法以散乱数据点作为径向基函数插值中心,计算权值构造插值函数逼近模型曲面的表达函数。
其优点是不需要知道任何散乱数据点之间的拓扑结构信息,重构得到的曲面光顺,曲面细节特征明显,具备良好的孔洞修复能力。
但是由于求解径向基函数权重的方程组随输入点数目的增多而不断扩张,当点云数据的数目增多时,运算量将迅速增大,这样使得由大规模点云数据构成的隐式曲面在赋值计算时非常耗时,极大限制了算法的应用范围。
2 MPU方法
在隐式曲面重建算法中,多层次单元划分(Multi-level Partition of Unity Implicits,MPU)曲面重构算法颇受国内外学者的关注。
此算法由Ohtake[3]于2003年提出,首先利用八叉树对输入的点云数据进行分割存储,根据每个子域内的数据点位置和法向量关系,选择不同的局部函数拟合局部点集所表示的曲面,然后计算每个局部函数的权值,最后利用这些权值将局部函数拼接出全局隐式函数来表示模型曲面。
该方法比较有效地解决了内存消耗大,运行时间慢的问题。
可以对海量散乱点云数据进行快速的曲面重建。
但是,使用该算法得到的模型曲面局部细节特征不明显,孔洞修复能力差,同时,MPU算法不具备抗噪性,
要求散乱点云数据点中不能含有噪声。
3 Poisson方法
Poisson曲面重建算法是一种较新的曲面重建算法。
在曲面重建领域,Kazhdan把重建问题归结为一个泊松问题[4]。
在此之前,大部分的隐式曲面重建算法都是把点云数据分割成许多小块,分别对其进行局部拟合,然后再用某种拼接函数把局部拟合的结果拼起来。
与此相反,泊松重建是一种全局的曲面重建方法,免去了试探性的点云分割和拼接过程。
泊松重建方法兼具全局重建和局部重建的优点,能够得到平滑的重建表面,对噪声具有较强的鲁棒性。
它的缺点在于不能及时地反应采样数据点集的修改信息,不引入跟模型形态相关的信息,容易错误地把一些不该连接的点云孔洞区域连接起来,对非封闭的点云模型,Poisson 会自动重建出封闭的曲面。
4 小波分析方法
J.Manson等人[5]提出了基于小波的三维曲面重建算法,首先利用三元张量积小波构造三维小波基,生成一个尺度函数和七个小波函数,然后对小波基进行初始化,再由小波基函数重构逼近模型表面,从而实现三维点云模型的曲面重建。
但此算法不具备抗噪性,且如何正确选取小波基也是尚未解决的难题。
参考文献
[1]李响,张海敏,徐人平,等.逆向工程在工业设计中的应用[J].轻工机械,2010,28(1):102-106.
[2]J.C.Carr,R. K. Beatson,J. B. Cherrie,T. J. Mitchell,W. R. Fright,B. C. McCallum,T.R. Evans. Reconstruction and representation of 3D objects with radial basis functions[J]. Proceedings of ACM SIGGRAPH 2001,2001:67-76.
[3]Y. Ohtake,A. Belyaev,M. Alexa,G. Turk,H. P. Seidel. Multi-level partition of unity implicits[J]. Proceedings of ACM SIGGRAPH 2003,2003,22(3):463-470.
[4]Michael Kazhdan,Matthew Bolitho,Hugues Hoppe. Poisson Surface Reconstruction[J].Euro- graphics Symposium on Geometry Processing,2006:61-70.
[5]J. Manson,G. Petrova,S. Schaefer. Streaming Surface Reconstruction Using Wavelets[J].Computer Graphics Forum,2008(27):1411-1420.。