发那科功能指令
功能指令说明(FANUC 0i-PMC)
张俊基笔记(功能指令说明)FANUC oi系统——PMC-功能指令编号缩写注释SUB1END1第一级顺序程序结束SUB2END2第二级顺序程序结束SUB3TMR可变定时器,其设定的时间在屏幕的定时器画面中显示和设定ACT=启动信号SUB4DEC译码,当从译码地址读取的BCD码与译码指令中的给定值对比,一致输出“1”,不同输出“0”。
主要用于M或T功能的译码SUB5CTR计数器,可作预置型,环型,加/减计数器,并可选择1或0作为初始值CN0=初始值选择UPDOWN=加/减计数选择RST=复位SUB6ROT旋转控制,用于回转控制,如刀架,旋转工作台等RN0=转台的起始号1或0BYT=位置数据的位数DIR=是否执行旋转方向短路径选择POS=选择操作条件INC=选择位置数或步数SUB7COD代码转换,将BCD代码转换为两位或四位BCD数字SUB8MOVE逻辑乘数数据传送,将逻辑乘数与输入数据进行进行逻辑乘,结果输出到指定地址。
也可从输入地址中,八位信号中,排除不要的位数SUB9COM公共线控制,控制直到公共结束指令(COME)范围内的线圈工作SUB10JMP跳转,用梯形图程序的转移。
当执行时,跳至跳转结束指令(JMPE)而不执行与JMP指令之间的梯形图SUB11PARI奇偶校验,对数据进行奇偶校验,检测到异常时输出报警O.E=0时,偶数校验;O.E=1时,奇数校验SUB14DCNV数据转换,将二进制码转换为BCD码或将BCD码转换为二进制码CNV=0时,二进制码转换为BCD码;NCV=1时,BCD码转换为二进制码SUB15COMP数值大小判别,将输入值与比较值进行比较来判别大小。
输入值小于等于比较值,则输出为1BYT=0时,处理数据为两位BCD;BYT=1时,四位BCDSUB16COIN一致性检测,检测输入值与比较值是否一致。
此指令只适用于BCD数据SUB17DSCH数据检索,在数据表(D)中搜索指定的数据,如未找到指定数据,则输出为1 SUB18XMOV变址数据传送,读取或改写数据表(D)中的内容RW=0时,读出;RW=1时,写入SUB19ADD加法运算,BCD码两位或四位数据相加;运算结果超过加数指定格式,输出置1SUB20SUB减法运算,BCD码两位或四位数据相减;运算结果为负,输出置1SUB21MUL乘法运算,BCD码两位或四位数据相乘;运算结果超过加数指定的格式,输出置1SUB22DIV除法运算,BCD码两位或四位数据相除除数为0,输出置1SUB23NUME定义常数,用于指定常数SUB24TMRB固定定时器,设定时间在编程时确定,不能通过定时器画面修改SUB25DECB二进制译码,可对1,2或4个字节的二进制代码数据译码。
发那科数控车指令
第三章MSFT 指令3.1 M指令(或辅助功能)定义:辅助功能是用地址字M 及二位数字表示的它主要用于机床加工操作时的工艺性指令其特点是靠继电器的通、断来实现其控制过程。
M00 程序暂停执行M00后,机床所有动作均被切断,重新按程序启动按键后,再继续执行后面的程序段。
M03 主轴正转启动M04 主轴反转启动M05 主轴停止转动M07 切削液打开M08 切削液打开M09 切削液停止M30程序结束并返回程原点M02 程序结束M32- 润滑开M33-润滑关M41、M42、M43、M44 主轴自动换档至1~4档M98 调用子程序M99 子程序结束3.2 F 指令(1)F指令(进给指令)F 指令是表示进给速度,用于控制切削进给量,在程序中有两种使用方法。
a、每分钟进给( G98)编程格式G98 F~F后面的数字表示主轴每分钟进给量单位为mm/min。
例:G98 F100 表示进给量为100mm/minb、每转进给( G97)后面的数字表示主轴每转进给量单位为mm/r。
例:G97 F0.2 表示进给量为0.2mm/r。
※注:每分钟进给量=每转进给量X主轴转速3.3 S 指令(主轴功能)主轴功能主要是表示主轴旋转速度。
编程格式S~S后面的数字表示主轴主轴,单位为r/min。
在具有恒线速功能的机床上,S功能指令还有如下作用。
a、最高转速限制编程格式G50 S~S后面的数字表示的是最高转速:r/min。
例:G50 S3000 表示最高转速限制为3000r/min。
b、恒线速控制编程格式G96 S~S后面的数字表示的是恒定的线速度:m/min。
例:G96 S150 表示切削点线速度控制在150 m/min。
c、恒线速取消编程格式G97 S~S后面的数字表示恒线速度控制取消后的主轴转速,如S未指定,将保留G96的最终值。
例:G97 S3000 表示恒线速控制取消后主轴转速3000 r/min。
3.4 T指令(刀具功能)数控车床进行零件加工时,通常需要多个工序、使用多把刀具,编写加工程序时各刀具的外形尺寸、安装位置通常是不确定的,在加工过程中有时需要重新安装刀具,刀具使用一段时间后也会因为磨损使刀尖的实际位置发生变化,如果随时根据每一把刀具与零件的相对位置来编写、修改加工程序,加工程序的编写和修改工作将会非常繁琐。
FANUC工业机器人常用指令

FANUC工业机器人常用指令简介FANUC工业机器人是一种广泛应用于工业生产中的自动化设备,其具有高精度、高效率、高可靠性和高稳定性的特点。
为了控制和操作这些机器人,我们需要了解一些常用的指令。
本文档将介绍一些FANUC工业机器人常用指令,包括运动控制指令、传感器与外部设备的指令和系统控制指令。
运动控制指令PTPPTP(Point to Point)是一种常用的运动控制指令,用于控制机器人从一个点(起始点)到另一个点(目标点)的运动。
指令格式:PTP X, Y, Z, A, B, C, VEL, ACC•X, Y, Z:目标点的坐标值。
•A, B, C:目标点的姿态(角度值)。
•VEL:速度值。
•ACC:加速度值。
LINLIN(Linear)指令用于控制机器人沿直线路径运动,从一个点(起始点)到另一个点(目标点),可以控制线性路径上的速度和加速度。
指令格式:LIN X, Y, Z, A, B, C, VEL, ACC•X, Y, Z:目标点的坐标值。
•A, B, C:目标点的姿态(角度值)。
•VEL:速度值。
•ACC:加速度值。
CIRCCIRC(Circular)指令用于控制机器人沿圆弧路径运动。
圆弧由起始点、目标点和中心点定义。
指令格式:CIRC X1, Y1, Z1, A1, B1, C1, X2, Y2, Z2, A2, B 2, C2, VEL, ACC•X1, Y1, Z1:起始点的坐标值。
•A1, B1, C1:起始点的姿态(角度值)。
•X2, Y2, Z2:目标点的坐标值。
•A2, B2, C2:目标点的姿态(角度值)。
•VEL:速度值。
•ACC:加速度值。
传感器与外部设备的指令READREAD指令用于读取外部设备的输入信号值。
指令格式:READ IN[1], IN[2], IN[3], ...•IN[1], IN[2], IN[3]:外部设备的输入信号编号。
WRITEWRITE指令用于写入外部设备的输出信号值。
fanuc功能指令

FANUC 系统功能的介绍点击数:79 发布时间:来源:中华工具网1、控制轨迹数(Controlled Path)CNC控制的进给伺服轴(进给)的组数。
加工时每组形成一条刀具轨迹,各组可单独运动,也可同时协调运动。
2、控制轴数(Controlled Axes)CNC控制的进给伺服轴总数/每一轨迹。
3、联动控制轴数(Simultaneously Controlled Axes)每一轨迹同时插补的进给伺服轴数。
4、PMC控制轴(Axis control by PMC)由PMC(可编程机床控制器)控制的进给伺服轴。
控制指令编在PMC的程序(梯形图)中,因此修改不便,故这种方法通常只用于移动量固定的进给轴控制。
5、Cf轴控制(Cf Axis Control)(T系列)车床系统中,主轴的回转位置(转角)控制和其它进给轴一样由进给伺服电动机实现。
该轴与其它进给轴联动进行插补,加工任意曲线。
6、Cs轮廓控制(Cs contouring control)(T系列)车床系统中,主轴的回转位置(转角)控制不是用进给伺服电动机而由FANUC主轴电动机实现。
主轴的位置(角度)由装于主轴(不是主轴电动机)上的高分辨率编码器检测,此时主轴是作为进给伺服轴工作,运动速度为:度/分,并可与其它进给轴一起插补,加工出轮廓曲线。
7、回转轴控制(Rotary axis control)将进给轴设定为回转轴作角度位置控制。
回转一周的角度,可用参数设为任意值。
FANUC 系统通常只是基本轴以外的进给轴才能设为回转轴。
8、控制轴脱开(Controlled Axis Detach)指定某一进给伺服轴脱离CNC的控制而无系统报警。
通常用于转台控制,机床不用转台时执行该功能将转台电动机的插头拔下,卸掉转台。
9、伺服关断(Servo Off)用PMC信号将进给伺服轴的电源关断,使其脱离CNC的控制用手可以自由移动,但是CNC仍然实时地监视该轴的实际位置。
FANUCPMC功能指令详解(14):系统功能指令二
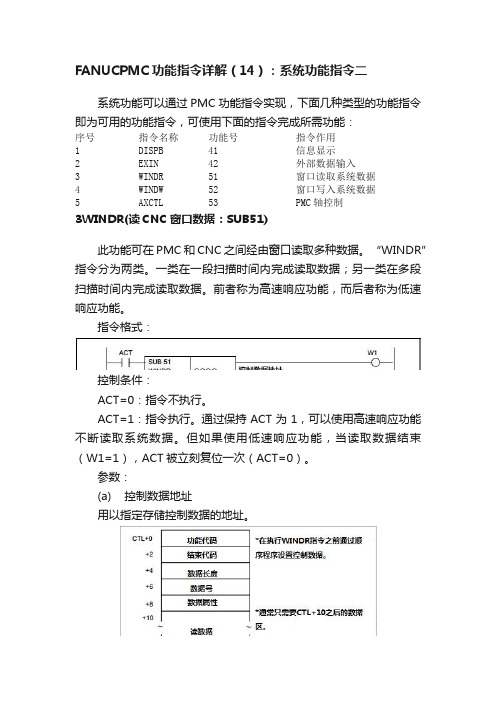
FANUCPMC功能指令详解(14):系统功能指令二系统功能可以通过PMC功能指令实现,下面几种类型的功能指令即为可用的功能指令,可使用下面的指令完成所需功能:序号指令名称功能号指令作用1 DISPB 41 信息显示2 EXIN 42 外部数据输入3 WINDR 51 窗口读取系统数据4 WINDW 52 窗口写入系统数据5 AXCTL 53 PMC轴控制3WINDR(读CNC窗口数据:SUB51)此功能可在PMC和CNC之间经由窗口读取多种数据。
“WINDR”指令分为两类。
一类在一段扫描时间内完成读取数据;另一类在多段扫描时间内完成读取数据。
前者称为高速响应功能,而后者称为低速响应功能。
指令格式:控制条件:ACT=0:指令不执行。
ACT=1:指令执行。
通过保持ACT为1,可以使用高速响应功能不断读取系统数据。
但如果使用低速响应功能,当读取数据结束(W1=1),ACT被立刻复位一次(ACT=0)。
参数:(a) 控制数据地址用以指定存储控制数据的地址。
读操作结束(W1):W1=0:W1复位。
W1=0表明WINDR未被执行或WINDR正被执行。
W1=1:通过读指令(ACT=1)读取数据结束时W1置为1。
如果使用低速响应功能,当读取数据结束时(W1=1),ACT被复位一次(ACT=0)。
运算结果寄存器:如果在WINDR指令执行期间发生错误,运算结果寄存器的第0位被置1。
同时,读操作结束信号W1被置1,错误的详细情况可输出至控制数据区的结束代码中。
4WINDW(写CNC窗口数据:SUB52)此功能经由窗口在PMC与CNC之间写多种数据项。
指令格式:控制条件:ACT=0:不执行WINDW指令。
ACT=1:执行WINDW指令。
在写数据完成后,ACT被复位一次(ACT=0)。
参数:(a) 控制数据地址用以指定存储控制数据的地址。
写操作结束(W1):W1=0:W1复位。
W1=0表明WINDW未被执行或正被执行。
发那科sub4功能指令
发那科sub4功能指令摘要:一、发那科sub4 功能指令简介1.发那科公司背景2.sub4 功能指令的概念与作用二、sub4 功能指令的详细说明1.功能指令的分类a.基本功能指令b.扩展功能指令2.功能指令的操作方式a.手动输入b.程序调用c.外部设备输入3.功能指令的应用领域a.工业自动化b.机器人控制c.机床操作三、sub4 功能指令的优势与局限1.优势a.提高生产效率b.简化操作流程c.兼容性强2.局限a.学习成本较高b.特定行业适用c.与其他品牌设备兼容性问题四、发那科sub4 功能指令在我国的应用与发展1.我国市场概况2.行业应用案例3.发展趋势与前景正文:发那科sub4 功能指令是发那科公司推出的一款用于工业自动化、机器人控制和机床操作等方面的功能指令。
它能够实现设备的自动化控制,提高生产效率,简化操作流程。
在我国,sub4 功能指令在相关行业得到了广泛应用,具有较高的市场认可度。
首先,我们来了解一下发那科sub4 功能指令的概念与作用。
发那科公司作为全球知名的工业自动化设备制造商,其产品广泛应用于各种行业。
sub4 功能指令是发那科公司推出的一种功能指令,具有强大的控制功能,可以实现设备的自动化操作。
在工业自动化、机器人控制和机床操作等领域,sub4 功能指令发挥着重要作用。
接下来,我们将详细介绍sub4 功能指令的分类、操作方式和应用领域。
功能指令分为基本功能指令和扩展功能指令。
基本功能指令主要包括:取刀、放刀、定位、直线运动、圆弧运动等。
扩展功能指令则涵盖了更复杂的控制功能,如:子程序调用、条件判断、数据传送等。
操作方式包括手动输入、程序调用和外部设备输入。
在应用领域方面,sub4 功能指令广泛应用于工业自动化、机器人控制和机床操作,有效提高了生产效率,简化了操作流程。
在讨论sub4 功能指令的优势与局限时,我们发现它具有提高生产效率、简化操作流程和兼容性强等优势。
但同时,也存在学习成本较高、特定行业适用和与其他品牌设备兼容性问题等局限。
发那科sub4功能指令

发那科sub4功能指令(原创版)目录1.发那科 sub4 功能指令概述2.发那科 sub4 功能指令的具体功能3.发那科 sub4 功能指令的应用领域4.发那科 sub4 功能指令的优势和特点5.发那科 sub4 功能指令的未来发展趋势正文一、发那科 sub4 功能指令概述发那科 sub4 功能指令,作为一款先进的机器人编程指令,旨在为机器人工程师和开发者提供一种更高效、便捷的编程方式。
通过使用发那科sub4 功能指令,可以大大提高机器人的性能和操作效率,使机器人在各种复杂环境中都能表现出色。
二、发那科 sub4 功能指令的具体功能发那科 sub4 功能指令主要包括以下几个方面的功能:1.插补控制:通过插补控制,发那科 sub4 功能指令可以实现对机器人运动轨迹的精确控制,从而使机器人在执行复杂路径时更加平滑、准确。
2.姿态控制:发那科 sub4 功能指令可以精确控制机器人的姿态,包括旋转、倾斜等,使机器人在执行某些特定任务时能够更好地适应环境。
3.速度控制:发那科 sub4 功能指令可以实现对机器人运动速度的精确控制,使机器人在执行任务时能够根据实际需要进行加速、减速。
4.信号处理:发那科 sub4 功能指令可以对各种传感器信号进行处理,使机器人能够根据环境变化做出相应的调整。
三、发那科 sub4 功能指令的应用领域发那科 sub4 功能指令广泛应用于各种机器人领域,如工业机器人、服务机器人等。
在工业生产中,发那科 sub4 功能指令可以帮助提高生产效率,降低生产成本;在服务领域,发那科 sub4 功能指令可以使机器人更好地为人们提供各种服务,如餐饮、医疗等。
四、发那科 sub4 功能指令的优势和特点发那科 sub4 功能指令具有以下几个优势和特点:1.编程简单:发那科 sub4 功能指令采用直观、简洁的编程方式,使开发者能够快速掌握并进行编程。
2.兼容性强:发那科 sub4 功能指令可以兼容各种主流的机器人控制系统,方便开发者进行集成。
发那科sub4功能指令
发那科sub4功能指令发那科Sub4是一款功能强大的机器人,具备多种指令让用户能够根据自己的需求进行操作。
下面将介绍几个重要的功能指令。
首先是“前进”指令,通过这个指令,用户可以让Sub4向前移动一定距离。
用户只需输入指令“前进”,并设置移动的距离,Sub4就能按照用户的要求前进。
这个指令在很多场景中都非常有用,比如在仓库中搬运货物时,可以通过这个指令将货物快速移动到指定位置。
接下来是“旋转”指令,通过这个指令,用户可以让Sub4在原地旋转一定角度。
用户只需输入指令“旋转”,并设置旋转的角度,Sub4就能按照用户的要求旋转。
这个指令在需要进行定位或调整方向的场景中非常有用,比如在仓库中需要将Sub4转向某个货物堆放区域时,可以使用这个指令。
除了移动和旋转的指令,Sub4还具备抓取和放置物体的功能。
用户可以使用“抓取”指令让Sub4抓取指定位置的物体,也可以使用“放置”指令将Sub4手中的物体放置到指定位置。
这个功能在需要进行搬运或组装工作时非常有用,比如在生产线上需要将物体从一个位置转移到另一个位置时,可以通过这个指令实现。
Sub4还支持语音控制功能。
用户可以使用“语音控制”指令将Sub4设置为语音控制模式,然后通过语音指令控制Sub4的各项操作。
这个功能非常方便,可以让用户更加轻松地控制Sub4的行动,提高工作效率。
总结一下,发那科Sub4是一款功能强大的机器人,具备多种指令让用户能够根据自己的需求进行操作。
通过“前进”指令可以让Sub4向前移动一定距离,“旋转”指令可以让Sub4在原地旋转一定角度,抓取和放置物体的功能可以让Sub4进行搬运和组装工作,语音控制功能可以让用户更加方便地控制Sub4的操作。
这些功能使得Sub4在各种场景中都能够发挥出它的优势,提高工作效率。
无论是仓库搬运、生产线组装还是其他需要机器人协助的工作,发那科Sub4都是一个值得信赖的选择。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
18
数据表—刀具表
首先根据刀库的排刀情况建立数据表
以上是一随机刀库的刀库表,刀具数量可以是刀 库刀座数量+1的关系。
13
二进制译码(数–位的关系)
应用:M代码译码处理
执行M07指令 ↙
14
五 沿信号的处理
上升沿检测
下降沿检测
15
逻辑运算指令
(可多字节进行运算) 异或指令
格式指定
与指令
或指令
16
非指令
格式指定
17
刀库指令
刀库的种类: 1固定刀库:刀具号和刀座号之间的关系不会随着刀具的交换而改变,而一直保持一一 对应。 2 随机刀库:刀具号和刀座号之间的关系随着刀具的交换而改变。因此需要刀具表来 记录刀具和刀座号的对应关系。
1:计算旋转步数
ACT 命令执行条件 22
例:
23
3.旋转到位后刀具交换完成后更新数据 表 指令:二进制变地址传送
RW 0:从数据表中读出数据 1:向数据表中写入数据
24
例:
更新当前位刀号
更新前
更新主轴位刀号
更新后
注意和前一指令错开一个时序
25
窗口功能
PMC和NC之间除了可以进行G/F的内部信号的交换外,还可以通过窗口功能对NC内的系统 数据、伺服信息、主轴信息等进行读写控制。 指令:
固定定时器指令,设定值在PMC程序上
2
定时器间歇打油润滑应用例
时序:1.每次开机自动打油15秒,2.正常时打油30秒,间歇30分钟,3.可手动打油
(每次打油时为打2.5秒,停2.5秒)
3
计数器指令
环形计数器
控制条件
CN0=0 从0开始,0,1。。。N CN0=1 从1开始,1,2。。。N UPDOWN=0 加计数
UPDOWN=1 减计数
RST 清除计数值 ACT 计数条件,高电平计数
指令变量 计数器预置值地址 双字节地址存放预置值 计数器寄存器地址 四字节地址存放计数值
(一般使用D寄存器)
4
计数器的工件计数例
5二:Biblioteka 据传送语句二进制附值语句格式指定:1:一个字节 2:两个字节 4:四个字节
常数:附值常数,十进制形式。
功能指令
一:PMC结构语句
第一级PMC程序区结束指令。第一级程 序为快速执行程序区,每8ms扫描一次。
第二级PMC程序区结束指令。系统会根 据第二级程序的长短分成若干段,每 8ms执行一段,为主程序区。
PMC结束指令,在END和END2之间是 子程序区。
1
定时器指令
可变定时器指令,设定值在MDI画面上
19
功能指令(以随机换刀为例)
1 首先根据T指令检索目标刀所在的刀座号 指令:二进制数据检索
数据表容量=刀具数容量 检索数据=目标刀号 检索结果=目标刀座号
W1=0 找到检索数据
1未找到检索数据
20
例:
程序: N10 T7 M6;
N20 M30;
21
2.根据当前位刀座号和目标刀座号计算出旋转方向和旋转步数 指令:二进制旋转指令
ACT 0:不执行窗口的读写功能 1:执行窗口的读写功能 *注1 W1 0:表示没有执行窗口功能或窗口功能正 在执行。 1:窗口功能执行完成 注1:窗口功能的读操作分成高速执行和低速执行两 种,对于高速执行可以使ACT信号保持执行连续读取。 对于低速执行必须是在读取完成后使ACT信号为0, 不然可能会影响到其它低速指令的读取。
10
一致性比较指令(仅适用于BCD码)
输入数据指定格式: 0:输入值为常数 1:输入值为地址
控制条件:
BYT 0:两位BCD 1:四位BCD
11
四:二进制代码的处理
二进制代码转换(数–数的关系)
应用:倍率开关的处理
手动倍率输入值:0.01%=11111111 11111110 切削倍率输入值: 1%=11111110 12
常数输出地址:常数的目的地址
6
逻辑乘数据传送指令 应用:
可以用来屏蔽某些位 的输出。
7
逻辑和数据传送
应用:
可以强制某些位输出为1
8
一个字节的数据传送
两个字节的数据传送
多个字节的数据传送
9
三:数据比较指令 二进制大小判别指令
指定格式:
输出结果:R9000#0=1 输入制=比较值 R9000#1=1 输入值<比较值 输入地址:取决于指定格式
窗口读指令
窗口写指令
窗口写操作都是低速执行指令。 控制数据地址:指定控制数据区的首地址
26
例:
读取Z轴的机械坐标,写入#1刀具补偿寄存器。
1 利用数据表对控制数据区进行附值 写入刀具补偿的数据区
写入刀具补偿的数据区
读取Z轴坐标的数据区
读取Z轴坐标的数据区
27
28
旋转部件分度数地址:存储刀盘刀数的地址号 当前位置地址:存储当前刀座号的地址号 目标位置地址:存储DXCHB搜索出的目标刀座号 的 地址 计算结果输出地址:存储目标位置号或旋转步数的 地址 W1:0 正向旋转 1 负向旋转
RN0 0:转台位置号从0开始 1:转台位置号从1开始 DIR 0:旋转方向不选择,正向 1:判断旋转方向 POS 0:计算目标位置 1:计算目标前一个位置(需要提前减速控制时采用) INC 0:计算位置数
换刀时序: 固定刀库: 因为刀具号和刀座号是一致的,因此程序中的目标刀具号指令可以直接和当前位的刀 座号进行比较计算,计算出相应的旋转步数和旋转方向驱动刀库电机旋转,当当前位 的刀座号和目标刀号一致后停止刀库电机,进行和主轴的刀具交换。 随机刀库:
1.因为刀具号和刀座号之间是随机安装的,因此当程序的目标刀号发出后,首先要根 据数据表所记录的刀具号和刀座号的对应关系检索出对应的刀座号
奇偶校验指令
在FANUC标准面板上的倍率开关上都有一位信号作为校验位而存在,我们可以取样这个信 号进行开关信号的掉线检测处理。同样的指令也可以应用在刀塔的编码器反馈刀位检测上。
OE:0 偶校验 1 奇校验 RST:复位错误信号输出 ACT:指令执行 W1 :1 错误输出
校验数据地址:校验指令只对一个字节的数据寄存器进行校验检查