动力调谐陀螺仪共22页
动力调谐陀螺仪一体式挠性支承关键技术研究

第2章动力调谐陀螺仪原理及误差分析点,并选定X,y,Z三个坐标轴建立的坐标系Oxyz成为参考坐标系(简称参考系)。
质点P的位置即由(x,Y,z)确定。
质点P在该参考系中的位置也可以利用矢量方法来描述,以位置矢量(简称位矢),表示,则有,=订+力+庙(2—2—1)其中,“.,,膏分别表示空间的三个坐标方向上的单位矢量,称为坐标基矢。
通常把相对于观察者静止的参考系称为定参考系或静参考系,把相对于观察者运动的参考系称为动参考系,惯性定律(牛顿第一定律)成立的参考系称为惯性参考系,简称惯性系。
由于惯性定律指出:不受外力或所受外力的合力为零的物体将保持静止或作匀速直线运动,因此,通常把静止或保持匀速直线运动的参考系称为惯性系a必须指出,图2.1质点的位置矢量静止是一个相对概念,因为绝对静止的物体是不存在的。
2.2.2相对运动及科里奥利加速度物体相对于动参考系的运动称为相对运动,物体相对于静参考系的运动称为绝对运动,动参考系置。
相对于静参考系K的运动称为牵连运动。
动参考系世‘相对于静参考系置作任意方式的运动时,相对运动与绝对运动呈现比较复杂的关系。
即使K’系的原点D‘相对于足系静止,相对于x’系静止的物体相对于足系也在作圆周运动,它不但有沿圆周切向的速度,还具有加速度。
假设动参考系足。
相对于静参考系置既有平动,还有绕通过其原点o’的某根转轴转动,角速度矢量为∞,如图2.2所示。
对于某时刻位于空间的P点,其相对于足系的位矢为,,相对于K’系的位矢为,’,而丘’系的原点01相对于芷系的位矢为^,则,=L+rI(2—2—2)第2章动力调谐陀螺仪原理及误差分析其中K系的坐标用(2-2.1)式表示,量‘系的坐标为,’=z’f’+y’-,I+一詹’(2-2—3)其中,i’,,’,k’分别为动参考系K‘的坐标基矢。
图2.2动参考系作任意方式的运动o’点在K系中的坐标为I"o=Xoi+yJ+zok(2—2—4)在静参考系K中对时间的微商称为绝对微商,用导表示;在动参考系K1中对时问的微商称为相对微商,用昙表示。
振动陀螺仪简介

G0
exp[ j(t t0 )][ Acos 2 C cos 2( C )]
2024/8/1
24
第25页/共46页
§3.2半球谐振陀螺仪
二 半球谐振陀螺仪的信号检测
双பைடு நூலகம்激励
在A、C两点施加激励
C B A
UB (t, ,
C )
G0 B
exp[ j(t t0 )] cos 2(
B )]
B A2 C2 AC cos 2C B tan1[C sin 2C /( A C cos 2C )] / 2
§3.1 石英音叉陀螺仪
二 结构与性能
(3)性能指标
• 偏值调整:
输出与使用环境温度有关,使用前可能会发生输出偏离, 其大小可达满刻度的百分之几。用户可调整阻尼电路中的 偏值调节装置,消除出厂时的剩余偏值。
2024/8/1
10
第11页/共46页
§3.1 石英音叉陀螺仪
二 结构与性能
(3)性能指标
QRS在高振动环境下仍具有优良性能。振动误差小于 0.003º/sg-1。
据有关报道,QRS已经取得美国海军、空军等的导弹、 飞机和舰船上的使用资格,标志着QRS的设计已进入成熟 阶段。
2024/8/1
15
第16页/共46页
§3.1 石英音叉陀螺仪
三 数字石英惯性测量装置
数字石英惯性测量装置(DQI)是为满足战术精确制导武 器在成本、体积和功耗等方面的特殊要求,由美国洛克威尔 公司和BEI公司联合开发的一种新型固态惯性测量装置。
11
第12页/共46页
§3.1 石英音叉陀螺仪
二 结构与性能
(3)性能指标
• 偏值稳定性:
偏值稳定性是指在一定温度范围内偏值的稳定性,是陀 螺的关键性指标之一。同类陀螺中这项指标QRS最好。通 常情况下内部并不需要进行温度控制,而是采用温度补偿 的方法,即反复测量确定各敏感元件与温度间的最佳关系, 通过输出补偿就可以达到较高的精度。
动力调谐陀螺仪误差分析及补偿技术——陈智民
d.驱动轴二倍旋转频率的角振动引起的 误差
Your site here
二、动调陀螺仪结构误差分析与补偿
a.剩余刚度和阻尼效应引起的漂移误差: 如果陀螺存在剩余刚度和阻尼效应,则当自转 轴与驱动轴之间出现相对角偏移时,就有同相弹 性力矩和正交弹性力矩作用在转子上,使自转轴 进动偏离原来所稳定的方位,极点沿着收敛螺线 返回原点。这种自转轴的方位偏离就是漂移。 补偿技术: 1)尽量减小锥形进动角频率。 2)尽量增大陀螺仪的时间常数。 3)尽量减小自转轴与驱动轴之间的角偏移。
Your site here
二、动调陀螺仪结构误差分析与补偿
b.质量不平衡引起的漂移误差: 在实际的仪表结构中,由于加工和装配误差, 不可能绝对精确地保证转子质心和平衡环质心 都位于挠性支承中心上,也不可能绝对精确的 保证内、外挠性轴轴线相交于一点。 补偿技术: 挠性接头制造好了,内外挠性轴轴线偏离的 距离便成定值。为了工艺上调整方便,可以先 绕外挠性轴进行静平衡,然后再通过绕内挠性 轴进行静平衡。在对陀螺仪进行精细的静平衡 以后,质量不平衡漂移系数可以达到很小。
Your site here
三、动调陀螺仪应用误差分析与补偿
动力调谐陀螺温度变化引起的误差分析: 温度变化对动力调谐陀螺仪各部分的影响包 括:转子体质心轴向偏移,力矩器力矩系数变化, 动力调谐陀螺仪调谐状态变化,信号器标度因数 变化,风阻力矩变化. 中等精度的动力调谐陀螺 仪所产生的温度漂移是不容忽视的,所以必须采 取措施减小温度变化对陀螺仪性能的影响. 补偿技术: 惯性器件结构设计补偿法是一种减少温度影 响的方法。结构设计补偿方法有力矩器热敏磁 分路补偿法和电路补偿法等。
Your site here
四、总结
动力调谐陀螺仪惯导系统中,因载体而产生的 几种误差对导航性能具有很大的影响,如圆锥误差 、挠性陀螺刻度因数非线性、姿态角速率引起的加 表零位变化误差等。这些误差的分析和补偿都是建 立在陀螺仪或系统精确的数学或物理模型(动力学 误差模型,静态误差模型、动态误差模型、运动模 型等)基础上的,所以在此没有讨论。
现代导航技术第五章(动力调谐陀螺)

sx
km I y L
x
因此,稳态时转子始终跟随壳体相对惯性空间作同步 转动,施矩电流Iy、Ix的大小和极性可以分别反映出 壳体转动角速度ωx、ωy的大小和方向。所以具有双 轴速率陀螺仪的功能。
பைடு நூலகம்28
§5.3 动力调谐速率陀螺仪的构成与分析
二、动力调谐速率陀螺仪的力矩器特性分析 例:设动力调谐速率陀螺仪动量矩L=0.1kg.m2/s。若 测量的最大速率ωmax=400°/s,则要求力矩器给 出的最大力矩为:
M s max Lmax 0.1 (400
180
) 0.64 N m
15
§5.2 动力调谐陀螺的调谐机理及其漂移误差
二、动力调谐陀螺的动力调谐机理
• 所谓“动力调谐”,是指挠性接头固有的弹簧刚度恰好精确地 被动力引进的弹簧刚度所抵消,从而消除了挠性支承对转子 的弹性约束。 • 通过调节挠性轴弹簧刚度K、平衡环转动惯量Ie(横向转动惯 量)和Iz(极转动惯量),或者调节转子自转角速度,可满足 动力调谐条件:
19
§5.2 动力调谐陀螺的调谐机理及其漂移误差
三、动力调谐陀螺仪的漂移误差
从表现形式来说,漂移误差可以分为以下几类: 1、对g不敏感的零偏: 2、对g敏感的零偏; 3、零均值随机零偏; 4、标度因数误差;
该类陀螺仪对于线加速度、角加速度、振动、磁场、温度 场的变化敏感,会导致测量误差。
20
§5.2 动力调谐陀螺的调谐机理及其漂移误差
9
§5.1 动力调谐陀螺的结构及特点
三、动力调谐陀螺仪的结构组成 挠性接头的材料特性:
动力调谐陀螺仪概要
动力调谐陀螺仪的原理结构图
在陀螺壳体上安装了位置中心对称的两 对信号器和两对力矩器,一轴上的电气对 称轴与另一轴上额的电气对称轴相互正交, 是陀螺的测量基准轴,同轴上的力矩器和 信号器的电气对称轴相重合。
转子镶有径向充磁的磁钢,力矩器是绕制在 陶瓷片骨架上圆柱面内的线圈,线圈有效工作段 镶在转子的环形槽内,且与环形槽留有一定的活 动空隙。当线圈通入施矩电流时,在径向磁场的 作用下,转子受到沿转子自转轴方向的电磁作用 力,同轴上的力矩器工作在推挽状态,产生的电 磁作用力对另一轴形成力偶,从而实现对陀螺施 矩。 信号器用来测量转子赤道平面相对壳体基准 面(由电气对称轴确定的平面)的偏转角,同轴 上的信号器输出接成差动形式。
1、优化设计,提高陀螺性能重复性和稳定 性 a、优化设计多种挠性接头,并进行试验验 证,提高了陀螺承载能力和重复性,减小 了陀螺 g 2 误差; b、优化设计磁路,提高了陀螺性能的稳定 性。
2、应用和研制新器件,提高陀螺使用精度 和使用寿命
a、应用轴联轴承,缩小了陀螺体积,提高了轴承 的承载能力、轴系的旋转精度和电机寿命; b、研制混合磁路式永磁力矩器,提高了力矩器磁 路的工作效率,降低了磁路分布的不均匀性,减 小了漏磁率,减小了陀螺常值漂移系数的大小, 提高了逐次稳定性; c、研制永磁磁滞电机,采用磁滞启动,永磁主工 作的工作方式,启动方便,陀螺性能重复性好。
未来发展展望
总结以往经验,参考应用情况,未来应在 下列方面重点发展: 1、研制大动态、高使用精度的动力调谐陀 螺,满足武器装备的需求; 2、研制小尺寸、低成本、中低精度的动力 调谐陀螺,可用到常规武器和石油勘探等 广阔民用领域。
动力调谐陀螺仪的基本原理、 主要特点及应用情况
张小东 2120121057
动力调谐陀螺仪资料

2、误差补偿国外比国内更精细更全面
如美国基尔福特制导与导航公司的K130A08陀 螺,为了补偿陀螺电机速率变化引起的陀螺标度 因数变化,减少逐日漂移,除采取温度控制、温 度补偿外,还在陀螺转子上设立一个位置标记, 电机每转一周输出一个脉冲,用于补偿误差。法 国测试仪器制造公司GAM1-G系列陀螺亦采用了 陀螺电机转速检测补偿和温度补偿装置。为了提 高陀螺工作寿命和可靠性,英国史密斯工业宇航 与防卫系统有限公司的2000系列和3000系列陀螺, 均采用气体轴承代替滚珠轴承。
未来发展展望
总结以往经验,参考应用情况,未来应在 下列方面重点发展: 1、研制大动态、高使用精度的动力调谐陀 螺,满足武器装备的需求; 2、研制小尺寸、低成本、中低精度的动力 调谐陀螺,可用到常规武器和石油勘探等 广阔民用领域。
目前国内技术与国外的差距
我国动力调谐陀螺虽已发展了30多年, 形成了系列型谱,在许多领域获得了广泛 应用。但与国外同类型高性能陀螺相比还 存在差距。究其原因主要是在材料、工艺 等方面与国外差距较大。表现在技术水平 上,主要表现在以下几个方面:
1、陀螺精度国内比国外相对较低 目前国内动力调谐陀螺随机漂移和逐日 漂移的精度相对较低,国外如美国基尔福 特制导与导航公司的MODⅡ型陀螺连续工 作稳定性为0.001 / h ,逐日漂移 0.004 / h ;德 国利铁夫公司K262陀螺随机漂移为 0.001 / h 。
1、优化设计,提高陀螺性能重复性和稳定 性 a、优化设计多种挠性接头,并进行试验验 证,提高了陀螺承载能力和重复性,减小 了陀螺 g 2 误差; b、优化设计磁路,提高了陀螺性能的稳定 性。
2、应用和研制新器件,提高陀螺使用精度 和使用寿命
a、应用轴联轴承,缩小了陀螺体积,提高了轴承 的承载能力、轴系的旋转精度和电机寿命; b、研制混合磁路式永磁力矩器,提高了力矩器磁 路的工作效率,降低了磁路分布的不均匀性,减 小了漏磁率,减小了陀螺常值漂移系数的大小, 提高了逐次稳定性; c、研制永磁磁滞电机,采用磁滞启动,永磁主工 作的工作方式,启动方便,陀螺性能重复性好。
惯性元件陀螺仪加速计简介PPT课件

• 液浮摆式加速度计的结构与液浮二自由度积分陀螺相似,只是在浮筒内没有转子, 相对于支撑中心有一偏心质量块。
第43页/共52页
2.6 加速度计-6
a M a Lma I M M a
2.1 陀螺仪概述-6
• 20世纪20年代,陀螺仪开始应用于航空领域,测量飞机的姿态角; • 地平仪,建立水平基准; • 航向仪,建立方
位基准;
第7页/共52页
2.1 陀螺仪概述-7
• 1944 年,德国开始向英国发射V-1和V-2导弹,这 两种导弹上首次成功应用了陀螺仪;
第8页/共52页
2.1 陀螺仪概述-8
第47页/共52页
2.6 加速度计-10
• 加速度计是测量元件中最重要最精密的元 件之一,对其精度要求极高。因为要对加 速度进行两次积分,得到位置信号,所以 如果对加速度的测量结果有误差,经过两 次积分,误差会累积,尤其对于长期工作 的系统误差会更严重。
第48页/共52页
2.6 加速度计-11
第49页/共52页
• 机械式转子陀螺转子的机械旋转必须依靠支撑,所以支撑技术是机械式转子陀螺 的关键技术,陀螺的性能指标越高,支撑技术就越复杂,成本也就越高,这是机 械转子式陀螺的局限性;
第36页/共52页
2.5 新型陀螺仪-5
• 激光陀螺和光纤陀螺的出现是惯性技术的一场大革命,光学陀螺和机械转子陀螺 的工作原理有本质的区别,它们分别服从解释微观世界的量子力学和解释宏观世 界的牛顿力学;
2.4 二自由度陀螺仪应用-1
• 把三自由度陀螺 仪的外框架与弹 体固连,就成为 二自由度陀螺仪, 能敏感绕其缺少 自由度轴方向的 角运动。
动力调谐挠性陀螺仪_光纤陀螺仪的测试及分析_侯煜
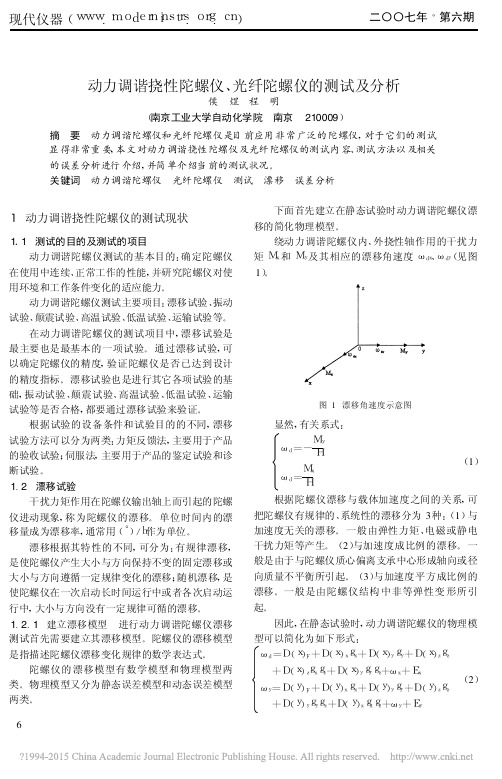
平衡的滤波效应引起的漂移系数 ; D(x)xx、D(y)yz为陀螺仪 x、y轴上由转子支承
系统 沿 xz、 yz方 向 不 等 弹 性 引 起 的 漂 移 系 数 ; D(x)yz、D(y)xx为陀螺仪 x、y轴上与 g平方有关的 其它漂移系数 ;gx、gy、gz为重力加速度沿陀螺仪 x、 y、z轴上的分量 ;ωx、ωy为陀螺仪壳体分别绕 x、y轴 相对于惯性空间的角 速度 ;Ex、Ey为陀螺仪 x、y轴 上的随机漂移率 。
B(y)2yω2y +B(y)3yωy3 +B(y)yxdωyωx +B(y)2yzωy2 ωz +B(y)2yxdωy2 ωx +ωdy
(3)
式中 , ωDx、ωDy为沿 x、y轴动态误差总的漂移速率 ;B (x)F、B(y)F为与载体角运动速率无关的漂移项 , 它 与剩余刚度 、陀螺仪零位偏角 、陀螺仪时间常数等有 关 ;B(x)x、B(y)y为与载体角速率一次方有关的项 , 它与陀螺仪的跟踪角速率精度及失 调转速有关 ;B (x)y、 B(x)z、B(y)x、B(y)z为 与 载 体 角速 率 一 次方 有关的项 , 它与陀螺仪惯性主轴与壳体间偏离角有 关 ;B(x)xy、B(x)xz、B(y)yx、B(y)yz为与载体角速率 交叉乘积有关的项 , 它与陀螺仪惯性主轴与壳体间 偏离角及力矩器非线性误差有关 ;B(x)2x、B(y)2y、B (x)3x、 B(y)3y、B(x)2xz、B(y)2yz分 别为 与载 体角 速率 平方 、三次方及交叉乘积有关的项 , 它与陀螺仪跟踪 精度 、失调转速等有关 ;B(x)xyd、B(y)yxd、B(x)2xyd、B (y)2yxd分别为与载体角速率 、角加速率交叉乘积有 关的项 , 它与陀螺仪跟踪角加速率精度有关 。 动态 误差模型系数的测定可在双轴或三轴速率模拟台上 进行 。 1.2.2 力矩反馈法漂移测试 力矩反馈法漂移测 试的原理 (见图 2)。 由于地球自转及外干扰力矩 的影响 , 陀螺仪的信号器将产生相应的输出信号 , 该信号经滤波 、 放大 、 解调 、 校正后 , 直流电流信 号输入到陀螺仪相应的力矩器中 , 力矩器便产生与 输入的直流信号相对应的控制力矩 , 与作用于陀螺 仪上的由地球自转产生的陀螺力矩和外干扰力矩平 衡 。测量力矩器的输入电流 , 并根据力矩器的标度 因数 , 扣除地球自转的影响 , 就可求得外加等效力 矩的数值 。