现代导航技术第五章(动力调谐陀螺)
动力调谐陀螺仪一体式挠性支承关键技术研究

第2章动力调谐陀螺仪原理及误差分析点,并选定X,y,Z三个坐标轴建立的坐标系Oxyz成为参考坐标系(简称参考系)。
质点P的位置即由(x,Y,z)确定。
质点P在该参考系中的位置也可以利用矢量方法来描述,以位置矢量(简称位矢),表示,则有,=订+力+庙(2—2—1)其中,“.,,膏分别表示空间的三个坐标方向上的单位矢量,称为坐标基矢。
通常把相对于观察者静止的参考系称为定参考系或静参考系,把相对于观察者运动的参考系称为动参考系,惯性定律(牛顿第一定律)成立的参考系称为惯性参考系,简称惯性系。
由于惯性定律指出:不受外力或所受外力的合力为零的物体将保持静止或作匀速直线运动,因此,通常把静止或保持匀速直线运动的参考系称为惯性系a必须指出,图2.1质点的位置矢量静止是一个相对概念,因为绝对静止的物体是不存在的。
2.2.2相对运动及科里奥利加速度物体相对于动参考系的运动称为相对运动,物体相对于静参考系的运动称为绝对运动,动参考系置。
相对于静参考系K的运动称为牵连运动。
动参考系世‘相对于静参考系置作任意方式的运动时,相对运动与绝对运动呈现比较复杂的关系。
即使K’系的原点D‘相对于足系静止,相对于x’系静止的物体相对于足系也在作圆周运动,它不但有沿圆周切向的速度,还具有加速度。
假设动参考系足。
相对于静参考系置既有平动,还有绕通过其原点o’的某根转轴转动,角速度矢量为∞,如图2.2所示。
对于某时刻位于空间的P点,其相对于足系的位矢为,,相对于K’系的位矢为,’,而丘’系的原点01相对于芷系的位矢为^,则,=L+rI(2—2—2)第2章动力调谐陀螺仪原理及误差分析其中K系的坐标用(2-2.1)式表示,量‘系的坐标为,’=z’f’+y’-,I+一詹’(2-2—3)其中,i’,,’,k’分别为动参考系K‘的坐标基矢。
图2.2动参考系作任意方式的运动o’点在K系中的坐标为I"o=Xoi+yJ+zok(2—2—4)在静参考系K中对时间的微商称为绝对微商,用导表示;在动参考系K1中对时问的微商称为相对微商,用昙表示。
动力调谐陀螺平衡回路的全解耦鲁棒控制
2 动调陀螺 闭环 系统的组 成原理
21 动调陀螺的动力学方程及传递函数 . 在忽 略了一些次要 因素并对 陀螺 的动力学 方
程在 小角 度处进 行线 性化 后得 到 :
I +日 +D o 兰 M 一J —H , t () 1
图 1 平衡回路的组成原理图
结合式 ( ) 2 1,( )和图 1 以得到简化的动调 可
Ab ta t sr c:Dy a c l u e yoDT n mia yT n dG r( G) iakn fwoip twoo tu s m dih s o l s ido u— up t yt a a t n t s e n t t
b d c u ld o n b e t e s r s a g lr e o i . s d n h d s n n o d c u l g e e o p e t e a l i m a u e n u a v l c t Ba e o t e e i i g f e o p i y g n n t r ,it r a c d u c ran y c n i e e , o u t o to l r sd sg e u r n e e d n mi e wo k d su b n ea n e ti t o sd r d ar b s c n r l e i n d t g a a t et y a c n e i o h p ro m a c dr b sn s f h y t m、 e f r n e a u t e so e s se n o t Ke o d : Dy a c l r e y o d c u l g r b s c n o yW r s n mi al t n d g r ; e o p i ; o u t o t l y u n r
现代军用导航技术
现代军用导航技术作者: 东北一只虎发布日期: 2005-11-11 查看数: 2694 出自: [复制链接]精确制导武器给人的印象是精确打击所需的末制导技术。
但是,实际的中远程制导武器(如防区外打击武器)在到达最后攻击处的巡航或滑翔阶段中,需要由导航系统按照一定的预定轨迹修正运动姿态,以保证导弹或制导炸弹在飞行末段进入末制导导引头的有效制导区域,否则就会因目标丢失造成脱靶。
此外,由于战场空间的拓展,导航技术在多种军事装备中广泛应用,甚至拓展到单兵系统。
现代战争迫切要求武器系统装备精密导航设备,提供准确的导航信息,来提高武器的战斗性能。
一、卫星导航技术卫星导航技术是指利用卫星导航定位系统提供位置、速度及时间等信息来完成对各种目标的定位、导航、监测和管理。
它综合了传统天文导航定位和地面无线电导航定位的优点,相当于设置在太空的一个无线电导航台,可在任何时间、任何地点为用户确定其所在的地理经纬度和海拔高度。
目前成功应用的卫星导航系统有1.美国的GPS、2.俄罗斯的GLONASS和3.我国自主研制生产的"北斗一号"卫星导航系统。
4.欧洲正在实施"伽利略"计划,预计将于2008年投入使用。
1. GPS导航系统GPS、GLONASS和"伽利略"均为全球导航系统。
它们工作原理类似,均是利用同时接收到4颗以上导航卫星的导航信号,计算出导航信息。
GPS是由美国国防部运作的军民两用系统,直接目的是为了满足军事需要。
该系统已经广泛地应用在美军的各种武器平台上,扩展为精确制导武器中复合制导的一种极其重要的手段。
GPS系统提供需授权的P码(可加密为Y码)精密定位服务(PPS)和C/A码标准定位服务(SPS)。
目前,P码提供的运动目标在空间的位置精度可达5m,测速精度优于0.1m/s,计时精度可达20ns。
GPS已成为美军实施远程精确打击的"法宝",在多次军事冲突中发挥了重要作用。
动力调谐陀螺仪动基座锁定回路设计

动力调谐陀螺仪动基座锁定回路设计
顾春杰;周百令;李宏生
【期刊名称】《传感技术学报》
【年(卷),期】2005(18)4
【摘要】为了使动力调谐陀螺仪从加电至工作至完全停止的全过程均有效工作,设计了动基座上的锁定回路,其解耦网络的交叉轴项随着陀螺转速一起动态变化.仿真表明:此动基座锁定回路能够较好地将动力调谐陀螺仪在静止→正常工作→静止的整个过程中都能锁定在零偏角附近.
【总页数】3页(P860-862)
【作者】顾春杰;周百令;李宏生
【作者单位】东南大学,仪器科学与工程系,南京,210096;东南大学,仪器科学与工程系,南京,210096;东南大学,仪器科学与工程系,南京,210096
【正文语种】中文
【中图分类】V241.5;O318
【相关文献】
1.动力调谐陀螺仪动基座启停技术研究 [J], 刘文虎
2.动力调谐陀螺仪数字化全状态伺服回路设计 [J], 蒋昭兴;李宏生;武强
3.动力调谐挠性陀螺仪、光纤陀螺仪的测试及分析 [J], 侯煜;程明
4.动力调谐陀螺仪动基座启停技术研究 [J], 刘文虎
5.实现动基座上动调陀螺仪启停锁定 [J], 吴本寿;周百令
因版权原因,仅展示原文概要,查看原文内容请购买。
动力调谐陀螺仪的八位置测试法
基 准 信 息确 定 误 差 系数 ,使 输 出在 其 取 值 范 围 内符
合 基 准 信 息 的过 程 。 由于 陀 螺 敏 感 的是 载 体 的 角 速 率 ,所 以首 先 介 绍 角速 率 的有 效 基 准 ,在 确 定 了正
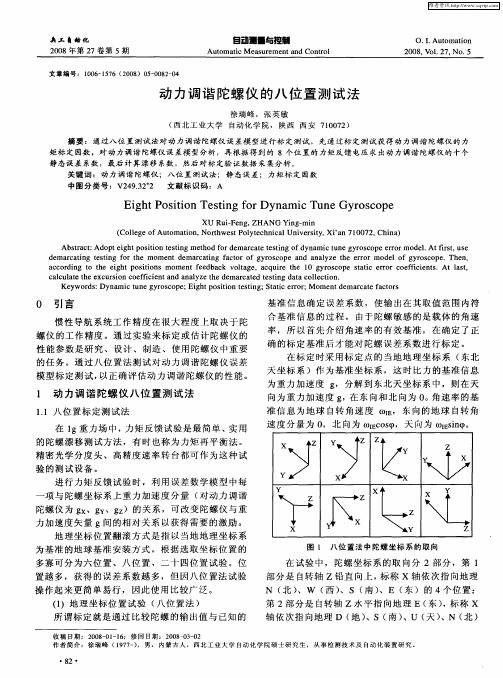
确 的标 定 基 准 后 才 能对 陀螺 误 差 系 数进 行 标 定 。 在 标 定 时 采 用 标 定 点 的 当 地 地 理 坐 标 系 ( 北 东 天 坐 标 系 )作 为 基 准 坐 标 系 , 这 时 比力 的基 准 信 息 为 重 力 加速 度 g ,分 解 到 东 北 天 坐 标 系 中 ,则在 天
向为重力加速度 g ,在 东 向和 北 向 为 0 。角速 率 的 基 准 信 息 为 地 球 自转 角 速 度 ∞E 东 向的 地 球 自转 角 ,
( le eo tmain No twe t ltc n c l ie st , ’n 71 0 2 Chn ) Co lg fAu o to , rh s y e h ia v r i Xia 7 , ia Po Un y 0
Ab ta t Ad p i h o i o e tn e h d f r e a c t e tn f y a c t n y o c p r o o e . is , e sr c : o te g tp s t n t si g m t o o m r a et si g o n mi u e g r s o e e r r i d d m d 1 Atfr t us d ma c tn e tn o h o e t d m a c t g f c o f g r c p n n l z h r o o e f g r s o e e r a i g t s i g f r t e m m n e r a i a t r o y os o e a d a a y e t e e r r m d lo y o c p .Th n n e, a c r i g t h i h o i o s mo n e d a k v la e c u r h 1 y o c p t t r o o fi i n s c o dn o te eg tp st n i me t f e b c o t g ,a q ie t e 0 g r s o e s a i e r c e fc e t .At l s , c at c lu a e t e e c r i n c e fc e t n n l z h e a c t d t si g d t o lc i n a c l t h x u so o f i i n d a a y e t ed m r a e e tn a a c l to . a e Ke wo d : y r s Dy a i u e g r s o e Ei h o ii n t si g S a i r o ; o n e a c t a t r n m ct n y o c p ; g tp s t e tn ; t tc e r M me t m r a ef c o s o d
动力调谐陀螺仪系统辨识方法

动力调谐陀螺仪系统辨识方法田凌子;李醒飞;赵建远;王亚辉【摘要】针对动力调谐陀螺仪(DTG)系统辨识中,传统辨识方法(最小二乘类辨识法和频域辨识法)辨识拟合度不高的问题,提出去离群点频域辨识法.该方法结合DTG 模型结构特征和固有有色噪声特点,将去离群点思想应用于DTG模型的频域辨识.实验结果表明,去离群点频域辨识法的辨识效果优于最小二乘类辨识法和传统频域辨识法,辨识拟合度在90%以上,并且辨识结果重复性好,辨识算法稳定.在DTG系统辨识中,去离群点频域辨识法能够提高辨识拟合度.【期刊名称】《计算机应用》【年(卷),期】2014(034)012【总页数】5页(P3641-3645)【关键词】动力调谐陀螺仪;系统辨识;强有色噪声;频域辨识法;最小二乘类辨识法【作者】田凌子;李醒飞;赵建远;王亚辉【作者单位】天津大学精密仪器与光电子工程学院,天津300072;精密测试技术及仪器国家重点实验室(天津大学),天津300072;天津大学精密仪器与光电子工程学院,天津300072;精密测试技术及仪器国家重点实验室(天津大学),天津300072;天津大学精密仪器与光电子工程学院,天津300072;精密测试技术及仪器国家重点实验室(天津大学),天津300072;天津大学精密仪器与光电子工程学院,天津300072;精密测试技术及仪器国家重点实验室(天津大学),天津300072【正文语种】中文【中图分类】TP273;U666.120 引言陀螺仪作为惯性导航系统的核心部件,能够为载体提供精确的空间角位置信息[1-2]。
目前,能达到惯性级的中高精度陀螺仪仍多为工作在闭环条件下的机械式陀螺仪[3],如液浮陀螺仪、动力调谐陀螺仪(Dynamically Tuned Gyroscope,DTG)等。
陀螺仪闭环系统在建立过程中,需要可靠的陀螺模型,以便调整控制器参数,保证整个闭环系统的性能。
传统的陀螺仪建模方法主要是机理建模[4],然而由于陀螺仪系统结构复杂,机理建模需要忽略掉诸多因素,建模精度不高,也难以针对某个陀螺仪的实际情况进行具体分析,建模不具有普适性[4]。
动力调谐陀螺仪误差分析及补偿技术——陈智民
d.驱动轴二倍旋转频率的角振动引起的 误差
Your site here
二、动调陀螺仪结构误差分析与补偿
a.剩余刚度和阻尼效应引起的漂移误差: 如果陀螺存在剩余刚度和阻尼效应,则当自转 轴与驱动轴之间出现相对角偏移时,就有同相弹 性力矩和正交弹性力矩作用在转子上,使自转轴 进动偏离原来所稳定的方位,极点沿着收敛螺线 返回原点。这种自转轴的方位偏离就是漂移。 补偿技术: 1)尽量减小锥形进动角频率。 2)尽量增大陀螺仪的时间常数。 3)尽量减小自转轴与驱动轴之间的角偏移。
Your site here
二、动调陀螺仪结构误差分析与补偿
b.质量不平衡引起的漂移误差: 在实际的仪表结构中,由于加工和装配误差, 不可能绝对精确地保证转子质心和平衡环质心 都位于挠性支承中心上,也不可能绝对精确的 保证内、外挠性轴轴线相交于一点。 补偿技术: 挠性接头制造好了,内外挠性轴轴线偏离的 距离便成定值。为了工艺上调整方便,可以先 绕外挠性轴进行静平衡,然后再通过绕内挠性 轴进行静平衡。在对陀螺仪进行精细的静平衡 以后,质量不平衡漂移系数可以达到很小。
Your site here
三、动调陀螺仪应用误差分析与补偿
动力调谐陀螺温度变化引起的误差分析: 温度变化对动力调谐陀螺仪各部分的影响包 括:转子体质心轴向偏移,力矩器力矩系数变化, 动力调谐陀螺仪调谐状态变化,信号器标度因数 变化,风阻力矩变化. 中等精度的动力调谐陀螺 仪所产生的温度漂移是不容忽视的,所以必须采 取措施减小温度变化对陀螺仪性能的影响. 补偿技术: 惯性器件结构设计补偿法是一种减少温度影 响的方法。结构设计补偿方法有力矩器热敏磁 分路补偿法和电路补偿法等。
Your site here
四、总结
动力调谐陀螺仪惯导系统中,因载体而产生的 几种误差对导航性能具有很大的影响,如圆锥误差 、挠性陀螺刻度因数非线性、姿态角速率引起的加 表零位变化误差等。这些误差的分析和补偿都是建 立在陀螺仪或系统精确的数学或物理模型(动力学 误差模型,静态误差模型、动态误差模型、运动模 型等)基础上的,所以在此没有讨论。
降低动力调谐陀螺输出噪声的方法
1
应 用 Ka n滤 波 前 , 要 对 陀 螺 的 噪 声 信 l ma 需
号 进 行 建 模 。 实 践 表 明 , 力 调 谐 陀 螺 的 输 出 噪 动 声 模 型 可 以用 A R( ) 型 ( 一 阶 自 回 归 模 型 ) 1模 即 来 拟 合 。AR( ) 型结 构 为 [ : 1模 ]
0. 5 1
为 DT 以其 结 构 简 单 、 本 低 廉 、 积 小 等 优 点 G) 成 体 广 泛 应 用 于光 电 跟 踪 陀 螺 稳 定 平 台 。要 达 到 较 高
的跟 踪 精 度 和 稳 定 精 度 , 轴 的 抖 动 量 必 须 要 减 视 小 到一 定 程 度 。本 文 从 噪 声 的 分 析 人 手 , 对 常 针
1作为研究对 象 。为了对 该 噪声进 行 数字处 理 , ) 通过 1 KHz的 采样 频 率 采 样 , 到 噪 声 数 据 序 列 , 得 对 其 中一 组 噪 声 数 据 样 本 进 行 F T 变 换 得 到 如 F 图 2 示 的 噪 声 单 边 功 率 谱 密 度 。 见 , 螺 输 所 可 陀
收 稿 日期 :0 20 . 1 修 订 日 期 : 0 2 0 — 1 2 0 — 32 ; 2 0 .52
维普资讯
第 4期
孟 中 , : 低 动 力 调 谐 陀 螺 输 出 噪 声 的 方 法 等 降
41 2
应 的滤 波 方 法 对 输 出 噪 声 进 行 处 理 。 文 献 [ ] 2、 [ ] 出 , 理 陀 螺 的 零 位 噪 声 可 以 采 用 Kama 3指 处 l n 滤 波 , 样 可 以将 噪声 对 系 统 的 影 响 降 至 很 小 。 这
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
sx
km I y L
x
因此,稳态时转子始终跟随壳体相对惯性空间作同步 转动,施矩电流Iy、Ix的大小和极性可以分别反映出 壳体转动角速度ωx、ωy的大小和方向。所以具有双 轴速率陀螺仪的功能。
பைடு நூலகம்28
§5.3 动力调谐速率陀螺仪的构成与分析
二、动力调谐速率陀螺仪的力矩器特性分析 例:设动力调谐速率陀螺仪动量矩L=0.1kg.m2/s。若 测量的最大速率ωmax=400°/s,则要求力矩器给 出的最大力矩为:
M s max Lmax 0.1 (400
180
) 0.64 N m
15
§5.2 动力调谐陀螺的调谐机理及其漂移误差
二、动力调谐陀螺的动力调谐机理
• 所谓“动力调谐”,是指挠性接头固有的弹簧刚度恰好精确地 被动力引进的弹簧刚度所抵消,从而消除了挠性支承对转子 的弹性约束。 • 通过调节挠性轴弹簧刚度K、平衡环转动惯量Ie(横向转动惯 量)和Iz(极转动惯量),或者调节转子自转角速度,可满足 动力调谐条件:
19
§5.2 动力调谐陀螺的调谐机理及其漂移误差
三、动力调谐陀螺仪的漂移误差
从表现形式来说,漂移误差可以分为以下几类: 1、对g不敏感的零偏: 2、对g敏感的零偏; 3、零均值随机零偏; 4、标度因数误差;
该类陀螺仪对于线加速度、角加速度、振动、磁场、温度 场的变化敏感,会导致测量误差。
20
§5.2 动力调谐陀螺的调谐机理及其漂移误差
9
§5.1 动力调谐陀螺的结构及特点
三、动力调谐陀螺仪的结构组成 挠性接头的材料特性:
• 需要低抗扭刚度,高抗弯刚度; • 要支承质量较大的转子,还要承受冲击、振动和过载等,因 此要求挠性接头材料要有高弹性模量和高抗拉强度; • 由于要反复扭转,要求挠性接头材料具有高的疲劳极限; • 此外还要弱磁性、耐腐蚀、线膨胀系数小,易加工; • 通常采用铁镍恒弹性材料、铌基恒弹性材料等;
• 因此,通过上述方法可以使转子支撑在一个特定的转速上, 并且具有净的零弹簧刚度,在这种条件下,转子与陀螺内、 外挠性轴的运动解耦,因而成为"自由的"。满足调谐条件的 转子速度称为调谐速度。
16
§5.2 动力调谐陀螺的调谐机理及其漂移误差
三、动力调谐陀螺仪的漂移误差
理想情况下,仪表壳体相对惯性空间转动时,陀螺自 转轴仍保持原来的方向稳定,此时壳体相对于自转轴的转 角能够精确地反映出壳体相对惯性空间的转角。 但实际过程中存在以下漂移误差: 1. 剩余刚度和阻尼效应引起的漂移误差 2. 质量不平衡引起的漂移误差 3. 结构非等弹性引起的漂移误差 4. 驱动轴二倍旋转频率的角振动引起的漂移误差
三、动力调谐陀螺仪的漂移误差
综上,动力调谐陀螺仪的角速率测量值可以用以下公式表示:
其中,ωx 和ωy为陀螺绕其输入轴的旋转速率;ax 和ay 为沿 输入轴的加速度;az 为沿自转轴的加速度; • Bfx 、 Bfy为对加速度不敏感的零偏系数; • Bgx 、Bgy为对加速度敏感的零偏系数; • Baxz、Bayz 为非等弹性零偏系数; • nx 、ny 表示零均值随机零偏; • Sx , Sy 为标度因数误差; • My,Mz 为交叉耦合系数。
1
第五章 动力调谐陀螺
• 对于刚体转子陀螺仪而言,减小支承上的摩擦力矩,是 提高陀螺仪精度的关键所在。 • 悬浮技术:50年代的液浮陀螺,精度高但结构复杂、制 造困难、成本很高。 • 随着惯导系统的推广,尤其是在飞机上的广泛应用,寻 求一种中高级精度、但结构简单成本较低的陀螺,成为 当时迫切需要解决的问题。 • 60年代初,出现了一种新颖支承原理的动力调谐陀螺 (Dynamically Tuned Gyro-DTG)
10
§5.1 动力调谐陀螺的结构及特点
四、动力调谐陀螺仪的特点
• 结构简单、成本较低:不需要液浮陀螺超净的环境,适合批 量生产,制造成本为液浮陀螺的1/4; • 体积小、重量轻 • 可靠性高、使用寿命长:与液浮陀螺相比,不存在浮子的密 封性问题,以及输电软导线容易损坏的问题; • 启动时间短、功率小:一般启动时间小于2min; • 和液浮陀螺仪相比,精度稍逊; • DTG目前应用范围广泛,从平台式到捷联式,从飞机、导弹 到舰船、航天飞行器。
27
§5.3 动力调谐速率陀螺仪的构成与分析
二、动力调谐速率陀螺仪的力矩器特性分析
由力矩器控制力矩产生的进动角速度称为施矩速率,在陀螺 工作过程中,力矩器产生的最大施矩速率应该大于载体可能 出现的最大速率。
M s km s I max L L
即:
M s Lmax
因此,为了得到较大的施矩速率,要求陀螺的动量矩要适 当的小,并且力矩器的标度因数尽可能的大,同时要求力 矩器允许通入的最大电流尽可能大(一般瞬态最大电流应 该达到2A)。
转动自由度1:当转子绕内挠 性轴偏转时,会带动平衡环 一起偏转;此时内挠性轴产 生扭转弹性变形; 转动自由度2:当转子绕外挠 性轴偏转,平衡环不会随之 偏转,此时外挠性轴产生扭 转弹性变形; 转动的特点:允许的转角很小 动力调谐陀螺仪的支承原理
7
§5.1 动力调谐陀螺的结构及特点
二、动力调谐陀螺仪的工作过程描述 内、外挠性轴和平衡环的作用
18
§5.2 动力调谐陀螺的调谐机理及其漂移误差
三、动力调谐陀螺仪的漂移误差
3. 结构非等弹性引起的漂移误差 挠性支承结构沿驱动轴的轴向和径向的弹性不等,则转子在 重力和惯性力的作用下,由于质心偏离支承中心,导致力的 作用线不通过支承中心,从而造成非等弹性力矩。 4. 驱动轴二倍旋转频率的角振动引起的漂移误差 驱动轴可能在工作过程中出现绕与其正交的轴的角振动(章 动),会引起平衡环的振荡,从而带来有害力矩。
21
第五章 动力调谐陀螺
§5.3 动力调谐速率陀螺仪的构成与分析
22
§5.3 动力调谐速率陀螺仪的构成与分析
挠性接头只能允许自转轴相对壳体小角度偏转 (±5°左右),故其测量角位移的范围是很小的, 只适用于平台式惯导系统。
若要用于捷联式惯导系统,则必须设置2个力矩再平 衡回路,将其构成双轴速率陀螺仪。具有这种功能 的动力调谐陀螺仪称为动力调谐速率陀螺仪。
一、动力调谐速率陀螺仪的构成原理
① 壳体绕X轴转动,自转轴相 对壳体出现偏角; ② X轴传感器输出电压信号, 经过放大器放大转换为电 流,送给y轴力矩器。 ③ Y轴力矩器根据电流的大小 和极性,产生负向力矩使转 子产生进动。 ④ 当转子进动角速度和壳体转 动角速度相同时,转子偏角 达到稳态。
25
§5.3 动力调谐速率陀螺仪的构成与分析
现代导航测试技术
Measuring and Testing Technique for Modern Navigation System
主讲:赖际舟 副教授
南京航空航天大学导航研究中心
办公电话:025-84892304-807 手机:13851475429 导航研究中心网页: Email:Laijz@
4
当力矩器标度因数: k m 3.2 10 N m / mA 则最大施距电流达到: I max
M s max 0.64 2000mA 4 km 3.2 10
29
因此,力矩器的温升和仪表的热设计成为这种陀螺仪需 要考虑的重要问题。
§5.3 动力调谐速率陀螺仪的构成与分析
支承转子和传递驱动力矩; 给自转轴提供了绕与其正交 的两个轴转动的自由度。 因此要求挠性轴具有足够大 的抗弯刚度和尽可能小的抗 扭刚度。
动力调谐陀螺仪的支承原理
8
§5.1 动力调谐陀螺的结构及特点
三、动力调谐陀螺仪的结构组成
驱动轴 转子 内、外挠性轴 平衡环 限动器(限制转子工作 转角不能过大从而导致 挠性接头损坏) 传感器(检测自转轴相 对壳体的偏角) 力矩器(对转子施加控 制力矩)
26
§5.3 动力调谐速率陀螺仪的构成与分析
二、动力调谐速率陀螺仪的力矩器特性分析 在动力调谐速率陀螺仪中,力矩器起到施矩元件 和测量元件的作用,其性能对整个陀螺仪性能有 很大影响。 因此对力矩器标度因数的稳定性、线性度和对称 性提出很高的要求。 另外,力矩器必须给出足够大的力矩,以使陀螺 的进动能够跟上壳体的转动,否则转子的偏角不 断增大,很快碰到限动器而使陀螺失效。
动力调谐陀螺仪的支承原理
5
§5.1 动力调谐陀螺的结构及特点
二、动力调谐陀螺仪的工作过程描述
1、驱动电机带动驱动轴旋转; 2、驱动轴通过内挠性轴带动平 衡环旋转; 3、平衡环通过外挠性轴带动转 子旋转;
动力调谐陀螺仪的支承原理
6
§5.1 动力调谐陀螺的结构及特点
二、动力调谐陀螺仪的工作过程描述 关于两个转动自由度的描述
23
§5.3 动力调谐速率陀螺仪的构成与分析
一、动力调谐速率陀螺仪的构成原理 敏感转子绕x轴角 偏移的传感器输出 信号,经过放大后 送至绕y轴给转子 施加力矩的力矩 器,从而组成一个 力矩再平衡回路。 即:x轴传感器和y 轴力矩器构成力矩 再平衡回路。
24
§5.3 动力调谐速率陀螺仪的构成与分析
17
§5.2 动力调谐陀螺的调谐机理及其漂移误差
三、动力调谐陀螺仪的漂移误差
从导致原因上来分类: 1. 剩余刚度和阻尼效应引起的漂移误差 由于无法精确调谐和完全消除阻尼效应所致(挠性轴材 料的弹性迟滞引起阻尼力矩,方向与转子偏转角速度的 方向相反,大小与偏转角速度的大小成正比); 2. 质量不平衡引起的漂移误差 由于加工和装配误差,转子质心和平衡环质心无法精确 位于挠性支承中心。从而引起质心轴向偏离和径向偏离 形成的质量不平衡力矩。