AK21系列数控转塔刀架
机床验收主要配置及附件清单

机床验收主要配置及附件清单一、普通车床CDE6140A主要配置及机床附件:二、数控车床CK6140(华中世纪星21T-3)主要配置及机床附件:三、数控车床CK6150(FANUC 0i Mate TD)主要配置及机床附件四、数控车床CK6140(广数980系统)主要配置及机床附件五、A VZ-500(华中世纪星)主要配置及机床附件六、A VL-1020(FANUC 0i Mate MD)主要配置及机床附件机床购置附属协议甲方(购买方):东明县职业中等专业学校乙方(销售方):山东冠泓数控装备有限公司甲乙双方经友好协商,在设备采购过程中通过竞争性谈判,鉴于以下条款,除达成设备采购协议及有关事项外,特达成以下附属协议:1、乙方免费承担“三包”服务期三年以上,免费按买方要求把设备安装调试到位并负责管、线、机油等费用,故障维修2小时响应,24小时到达现场;超三包服务期,乙方仍对设备承担终身服务,甲方只负责零配件费用,其他费用仍由乙方负责;2、乙方免费为甲方培训设备操作维修教师,免费为设备软件升级,免费提供与教学有关的资源,在甲方场地,对甲方专业教师免费进行机床操作培训,理论培训、安全维护保养培训、实训项目培训;甲方派送机床方面专业技术和任课人员,到乙方生产场地,接受技术培训,培训人数:5人/批以内,培训时间:一周;培训内容:机床维修和故障等;甲方参与和监督所购机床精度检验;甲方免费提供食宿等方便条件。
3、乙方免费为甲方参加国、省、市级技能大赛,提供技术支持和资源服务;乙方为甲方免费培训国、省、市等参赛选手和教师,积极协调大赛承办单位,进行现场培训,预先熟悉机床场地,练习,熟悉相关事项和内容。
为甲方提供大赛软件应用方便和优惠等服务;帮助甲方获得尽可能获得好成绩,;大赛选手和教师由乙方选送。
4、甲乙双方本着互利共赢原则共同研究和开发校企合作项目;甲方参加乙方牵头组织的职教集团,免费享受集团提供的教学资源,教材、培训方案等优惠服务;为甲方所在地区树立校企合作典范。
AK31系列刀台工作原理及维修实例解析
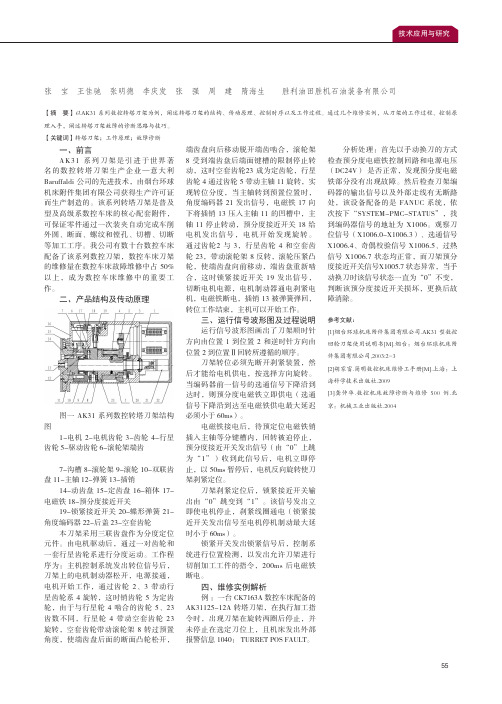
55一、前言A K 31 系列刀架是引进于世界著名的数控转塔刀架生产企业—意大利 Baruffaldi 公司的先进技术,由烟台环球机床附件集团有限公司获得生产许可证而生产制造的。
该系列转塔刀架是普及型及高级系数控车床的核心配套附件,可保证零件通过一次装夹自动完成车削外圆、断面、螺纹和镗孔、切槽、切断等加工工序。
我公司有数十台数控车床配备了该系列数控刀架,数控车床刀架的维修量在数控车床故障维修中占 50%以上,成为数控车床维修中的重要工作。
二、产品结构及传动原理图一 AK31 系列数控转塔刀架结构图1-电机 2-电机齿轮 3-齿轮 4-行星齿轮 5-驱动齿轮 6-滚轮架端齿7-沟槽 8-滚轮架 9-滚轮 10-双联齿盘 11-主轴 12-弹簧 13-插销14-动齿盘 15-定齿盘 16-箱体 17-电磁铁 18-预分度接近开关19-锁紧接近开关 20-蝶形弹簧 21-角度编码器 22-后盖 23-空套齿轮本刀架采用三联齿盘作为分度定位元件。
由电机驱动后,通过一对齿轮和一套行星齿轮系进行分度运动。
工作程序为:主机控制系统发出转位信号后,刀架上的电机制动器松开,电源接通,电机开始工作,通过齿轮 2、3 带动行星齿轮系 4 旋转,这时销齿轮 5 为定齿轮,由于与行星轮 4 啮合的齿轮 5、23 齿数不同,行星轮 4 带动空套齿轮 23旋转,空套齿轮带动滚轮架 8 转过预置角度,使端齿盘后面的断面凸轮松开,端齿盘向后移动脱开端齿啮合,滚轮架 8 受到端齿盘后端面键槽的限制停止转动,这时空套齿轮23 成为定齿轮,行星齿轮 4 通过齿轮 5 带动主轴 11 旋转,实现转位分度,当主轴转到预置位置时,角度编码器 21 发出信号,电磁铁 17 向下将插销 13 压入主轴 11 的凹槽中,主轴 11 停止转动,预分度接近开关 18 给电机发出信号,电机开始发现旋转。
通过齿轮2 与 3,行星齿轮 4 和空套齿轮 23,带动滚轮架 8 反转,滚轮压紧凸轮,使端齿盘向前移动,端齿盘重新啮合,这时锁紧接近开关 19 发出信号,切断电机电源,电机制动器通电刹紧电机,电磁铁断电,插销 13 被弹簧弹回,转位工作结束,主机可以开始工作。
用AK31系列刀台更换FANUC3T_A系统数控车床刀台的电气控制设计

·!"·
机械管理开发
" 新旧刀台性能及逻辑比较
限于篇幅略去两种刀台结构图。旧刀台电气及机械都比较 简单,它采用接近开关计数选刀,反转锁紧由普通微动开关发 讯,这样经常选错刀,有时刀台没有锁紧,加之设计落后,刀台机 械 部 分 不 可 靠 , 故 障 率 相 当 高 。 -1%’ 新 刀 台 是 引 进 意 大 利 2-34,,-567 的先进技术研制成功的,其机械设计非常先进,刀 盘无须抬起实现转位刹紧。电气部分采用角度编码器,选刀快速 而可靠。逻辑控制也较简单。图 ’ 为 -1%’ 刀台的动作流程。
能的建设技术方案进行论证,寻找最优方案,并对项目建成后的 经济效益和社会影响进行预测和评价的一种科学分析方法。由 此考察项目技术上的先进性和适用性,经济上的盈利性和合理 性,建设上的可行性。
可行性研究应从项目建设到生产经营的全过程全方位考察、 分析项目的可行性。从市场需求的预测开始,通过多方案比较, 论证项目建设规模、产品方案、工艺技术方案、厂址选择的合理
#$$# 年增刊
机械管理开发
·!"·
其是重化工业、高新技术产业,要充分考虑到市场需求,设立进 入门槛,企业的进入、外国大企业、大集团的进入只能是逐步的, 不允许一哄而起。在制定和实施产业政策的过程中,必须建立有 效的协调机构。把政府、大企业(大集团)、中介组织、金融机构、 学术界的有关人士组织起来,共同制定并策划实施产业政策,在 全社会 范围内形成共识。
数控车床四工位刀架原理及维修

障,恢复生产是我们 的期望。要做到这一点 ,我们必须 离)带动刀架体 1旋转 ,在刀架体旋转 的过程 中,由于
要总结经验 ,吃透原理 ,以便工作起来得心应手 。
弹簧 3l的作用使得粗定位销 13始终保持与刀架座 23接
在对几次数控车床四工位刀架维修后 ,笔者总结常 触 ,且粗定位销 l3只能沿 一个方 向公 转 ,粗 定位销在
刀架连续旋转找不见多由电路问题所致在实践中有以下几种可能磁性减弱表面吸附灰尘过多与灰尘混合形成一层隔膜使磁性减弱解决这种故障比较容易拆下磁铁架表面擦拭干净装上即好刀架在长时间工作后由于反复正反转有可能使螺纹压圈松动导致霍尔元件骨架实际为刀架定位槽与霍尔元件位置不匹配解决这种故障也比较容易松开螺纹压圈管脚断裂对于管脚没有封装的霍尔元件管脚断裂时有发生要求在刀架拆卸或保养要小心翼翼轻拿轻放避免利器碰撞管脚厂家针对以上问题已推出有封装的霍尔元件组件问题的解决已大有改观某刀号信号导线断裂仔细测量刀位信号导线刀架体磁铁架磁铁霍尔元件外罩0导线刀架轴螺纹压圈4霍尔元件骨架推力球轴承粗定位销螺杆下粗定位销0蜗轮刀架电动机中滑板4床鞍传动键联接螺钉刀架座轴承压盖蜗杆0轴承螺母弹簧上粗定位销刀架工作原理粗定位压盖刀架电动机有两个动作正转和反转其动作控制由霍尔元件来完成通过导线连接该导线为一个输入端一个输出端四个刀位信号动机得到信号后正转带动蜗杆转动并带动蜗轮冷加工设备与维修基于提高主轴回转精度的车床动力传动结构改进山东理工大学机械工程学院004主轴是机床的核心零件机床主轴的精度和特性可以用来评价机床本身的精度一般说来主轴的回转精度是衡量一台数控机床技术参数的一个关键指标安装工件或者刀具处的径向圆跳动量和端面圆跳动量有时也会涉及到主轴倾角运动的变化量回转精度通常是在无载荷的情况下通过手动或者低速机动主轴进行测量的在车床的主轴轴系中由于主轴一般用于安装工是工件的相对位置基准和运动基准其回转精度直接影响所加工零件的表面粗糙度和圆柱度等指标所以改善和控制主轴的回转精度使其确保工件的加工质是数控车床生产和改造的重要课题我公司自主研制生产的ak37型卧式车床问题会很快解决对于故障刀架卡死肯定由机械问题所致现在刀架处润滑不良由于加工中大量切削液飞溅气腐蚀使刀架内部各部分不能正常工作例如下推力球轴承磨损严重轴承滚珠滚道磨损或出现麻点需更换轴承弹簧失效或断裂影响粗定位或卡死需更换表面腐蚀或断裂滑销表面腐蚀影响螺上下导向使刀架卡死滑销断裂就不言而喻了以上对车床四工位刀架结构及原理进行了分析举了常见故障及处理方法除此之外日常保养对于刀架来说也很重要要做到每班将刀架清理干净定期给各滑动部分加润滑油以保证刀架寿命月份已研制生产了三代一直以来都能够满足公司的生产要求但近年来随着客户对加工工件精度要求的提高问题日渐显露针对该型号车床加工精度的提高问题列入攻关日
980TDb系列标准梯图说明
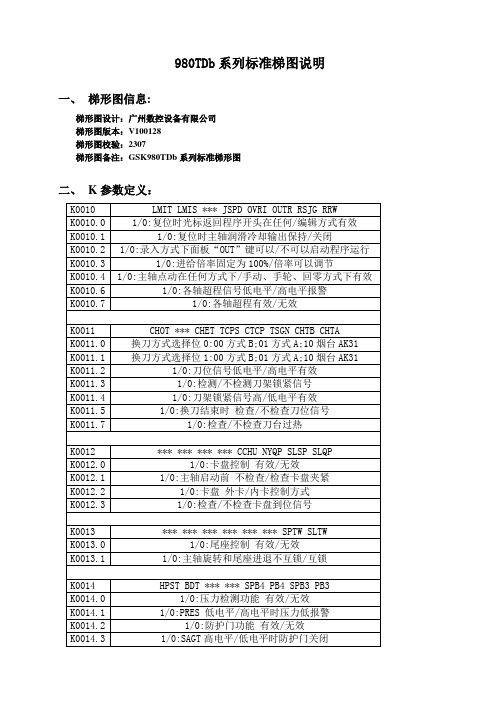
980TDb系列标准梯图说明一、梯形图信息:梯形图设计:广州数控设备有限公司梯形图版本:V100128梯形图校验:2307梯形图备注:GSK980TDb系列标准梯形图二、K参数定义:三、980TDb系统I/O地址定义输出信号Y地址:四、功能说明:4.1尾座控制1、当尾座控制无效(K13.0=0)时,尾座控制M指令将报警;2、当尾座与主轴控制互锁时(K13.1=1)则在启动主轴前会先检测尾座进是否有效,当主轴启动后将不允许尾座退.4.2卡盘控制●相关参数:1、当卡盘控制无效(K12.0=0),执行卡盘控制M指令将报警;2、当检查卡盘夹紧(K12.1=1)时,卡盘未夹紧不可启动主轴,主轴启动后不得松开卡盘;3、K12.2用于选取卡盘夹紧输出是Y1.4还是Y1.5(当K12.2=0时则夹紧输出是Y1.4);4、当K12.3=0则延时参数设置的M代码执行时间后就认为卡盘操作完成,当K12.3=1时则需要检测到卡盘到位信号后才认为操作完成,如果在6S内没有接收到到位信号将报警;5、当DT18不为零时,卡盘输出时间达到DT18设置的时间后将关闭其输出;6、当用输入信号X0.2控制卡盘操作时则要主轴停止并延时D21所设时间后控制方有效.7、K17.7设为1,多主轴功能有效时,不检查卡盘到位信号。
4.3润滑控制1、当DT17不为零则自动润滑有效,此时每间隔DT16设置的时间后将输出润滑(时间为DT17所设);手动及指令也可以开启或关闭润滑输出,开启的时间为DT17所设(如此操作后计时将重新开始);2、自动润滑有效时,如K16.2设为1,则系统一上电就将润滑输出DT17设定的时间,K16.2设为0则上电后将需经过DT16设定的时间后才开始润滑。
3、当DT17=0则手动润滑有效,若参数No.112=0则输出将不会自动关闭,若不为0则输出时间达到N0.112设置的时间后将自动关闭润滑输出;4.4档位S0~S4输出控制开关量控制控制方式下有效。
AK21系列数控转塔刀架
7
最大倾覆力矩(N.m)
1700
8
重复定位精度(mm)
0.005
9
毛重(kg)
80
10
净重(kg)
68
11
箱体尺寸(长宽高)(cm)
49X34X43
AK21166X4安装尺寸图
主要规格和参数:
序号
项目
参数
1
刀台方(mm)
166
2
工位数(个)
4
3
装刀基面高(mm)
70
4
单工位转位时间(mm)
3.24
0.005
9
毛重(kg)
68
10
净重(kg)
56
11
箱体尺寸(长宽高)(cm)
49X34X43
AK21150X6D安装尺寸图
主要规格和参数:
序号
项目
参数
1
刀台装刀基准面到中心距离(mm)
107
2
工位数(个)
6
3
装刀基准孔高(mm)
147
4
单工位转位时间(mm)
3.0
5
刀架转速(s)
20
6
最大切向力矩(r/min)
0.005
9
毛重(kg)
71
10
净重(kg)
60
11
箱体尺寸(长宽高)(cm)
58X28X42
AK21240X4A安装尺寸图
主要规格和参数:
序号
项目
参数
1
刀台方(mm)
240
2
工位数(个)
4
3
装刀基面高(mm)
120
4
单工位转位时间(mm)
烟附霍尔刀架AK30说明书
信号
刀架在反向锁紧时, 反向锁紧电源缺相或电源不
仍是缓慢向前运行或 通
修复锁紧驱动电源
锁不紧
反向锁紧开始在1.8 秒内检测不到正位信
1.正位信号线接触不良
号
2.微动开关故障
1.将引线焊牢 2.更换微动开关
电机过热
1.锁紧时间过长 2.刀架换刀频率过高 3.电机有故障
1.将锁紧时间调至1.6秒 2.将刀架启动时间间隔加大至10 秒以上 3.更换电机
五、刀架位置信号与机床联机接口设计
正位信号是由微动开关发出的,
覆铜板上的工位信号是由霍尔元件发出的,霍尔开关参数如下:
型号;CS3144L; 电压:直流12V至24V;电流:25mA,输出方式:
NPN,正逻辑,联机接口电路见图5这3种型式。
电 源+
CS
负极
3144L 输出
电源+
负载
CS 负极
3144L 输出
接线板22上的引线编号与覆铜板20(图4)上的编号相对应,+ -为直流电源, 1.2.3.4.5.6(.7.8)为刀架的位置信号。刀架在第一工位时,1端为低电平,余者 为悬空状态。在第二工位时,2端为低电平,余者为悬空状态,其它依次类 推。
AK30系列
使用说明书
共9 页 第4 页
图2 AK30系列数控转塔刀架结构见图 1.本体 2.工位牌 3.主轴 4.转动齿盘 5.固定齿盘 6.刀盘 7.双联齿盘 8.发信杆 9.碰 头 10.皮带轮 11.微动开关 12.齿形带13.蜗轮 14.拨盘 15.粗定位销 16.皮带轮 17. 电机 18.罩 19.永久磁铁 20.覆铜板(带霍尔元件)21.接线座 22.接线板23.磁铁 座 24.转套 25.发信座 26.等分盘 27.销座 28接口(M16x1.5)
两齿差外啮合双联行星传动的固有特性分析
两齿差外啮合双联行星传动的固有特性分析叶友东;汪凯;周哲波【摘要】An analytical translational-rotational-coupling dynamic model is developed to evaluate the natural characteristics of two teeth difference external compound planet transmission by adopting centralized parameters method.The governing differential equations are established by deriving relative displacement relationships between all motional components, and Matlab is used to calculate and obtain the natural frequencies and free vibration modes of the transmission system.The analysis results show that the vibration modes are classified into rotational mode of the central members, translational mode of the central members and complicate vibration mode of the planetary gears.The vibration modes are different from the NGW planetary transmission, and especially the planetary gears vibration mode are quite complex with several different vibration modes.The research can provide useful reference for preventing resonance, vibration and noise reduction, and structure optimization of the planet transmission mode used in polishing grinding.%为揭示两齿差外啮合双联行星传动的固有特性,采用集中参数法建立了该传动系统的平移-扭转耦合动力学数学模型.通过分析各运动构件间的相对位移关系,建立系统运动的微分方程,用Matlab程序计算获得系统的固有频率和主振型.分析结果表明,该行星传动具有中心构件扭转、中心构件平移和行星轮复杂振动模式,且其主振型与一般NGW行星传动有所不同,尤其是行星轮振动模式更为复杂,具有多种不同振动模式.研究结果可为该行星传动方式应用于抛光磨头时防止共振、减振降噪及结构优化提供参考.【期刊名称】《河北科技大学学报》【年(卷),期】2016(037)006【总页数】7页(P540-546)【关键词】机械零件及传动;双联行星齿轮传动;固有频率;振型;位移【作者】叶友东;汪凯;周哲波【作者单位】安徽理工大学机械工程学院,安徽淮南 232001;安徽理工大学机械工程学院,安徽淮南 232001;安徽理工大学机械工程学院,安徽淮南 232001【正文语种】中文【中图分类】TH132.41两齿差外啮合行星齿轮传动是一种新型传动方式,在中国被成功应用于AK31系列全功能数控转塔刀架和抛光机的抛光磨头中,前者利用该行星传动用以完成刀架的松开、转位和锁紧,减小了刀架的体积,增大了传动机构的转矩,使得刀架设计更趋紧凑,极大地减少了数控车床的安装空间,但刀架在使用过程中仍存在振动幅度较大现象,导致刀具寿命及被加工工件的加工精度的降低[1];后者(如KD268C 抛光磨头)中采用该行星传动实现磨头公转,减少了零件数量,使得磨头内部结构紧凑,减轻了磨头重量,但磨头在使用过程中仍存在振幅较大导致噪音大甚至碎砖现象。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
箱体尺寸(长宽高)(cm)
58X33X44
AK21206X4安装尺寸图
主要规格和参数:
序号
项目
参数
1
刀台方(mm)
206
2
工位数(个)
4
3
装刀基面高(mm)
106
4
单工位转位时间(mm)
3.15
5
刀架转速(s)
17
6
最大切向力矩(r/min)
800
7
最大倾覆力矩(N.m)
2000
8
重复定位精度(mm)
0.005
9
毛重(kg)
68
10
净重(kg)
56
11
箱体尺寸(长宽高)(cm)
49X34X43
AK21150X6D安装尺寸图
主要规格和参数:
序号
项目
参数
1
刀台装刀基准面到中心距离(mm)
107
2
工位数(个)
6
3
装刀基准孔高(mm)
147
4
单工位转位时间(mm)
3.0
5
刀架转速(s)
20
6
最大切向力矩(r/min)
7
最大倾覆力矩(N.m)
2500
8
重复定位精度(mm)
0.005
9
毛重(kg)
65
10
净重(kg)
50
11
箱体尺寸(长宽高)(cm)
59X39X41
AK21300X4D安装尺寸图
主要规格和参数:
序号
项目
参数
1
刀台方(mm)
300
2
工位数(个)
4
3
装刀基面高(mm)
140
4
单工位转位时间(mm)
3.9
5
刀架转速(s)
15.6
6
最大切向力矩(r/min)
2750
7
最大倾覆力矩(N.m)
5500
8
重复定位精度(mm)
0.005
9
毛重(kg)
72
10
净重(kg)
57
11
箱体尺寸(长宽高)(cm)
73X48X46
0.005
9
毛重(kg)
71
10
净重(kg)
60
11
箱体尺寸(长宽高)(cm)
58X28X42
AK21240X4A安装尺寸图
主要规格和参数:
序号
项目
参数
1
刀台方(mm)
240
2
工位数(个)
4
3
装刀基面高(mm)
120
4
单工位转位时间(mm)
2.9
5
刀架转速(s)
20
6
最大切向力矩(r/min)
1000
56
11
箱体尺寸(长宽高)(cm)
58X28X42
AK21150X4D安装尺寸图
主要规格和参数:
序号
项目
参数
1
刀台方(mm)
190
2
工位数(个)
4
3
装刀基面高(mm)
122
4
单工位转位时间(mm)
3.5
5
刀架转速(s)
20
6
最大切向力矩(r/min)
560
7
最大倾覆力矩(N.m)
1700
8
重复定位精度(mm)
5
刀架转速(s)
17
6
最大切向力矩(r/min)
400
7
最大倾覆力矩(N.m)
1250
8
重复定位精度(mm)
0.005
9
毛重(kg)
38
10
净重(kg)
30
11
箱体尺寸(长宽高)(cm)
56X40X36
AK21180X4安装尺寸图
主要规格和参数:
序号
项目
参数
1
刀台方(mm)
180
2
工位数(个)
4
3
装刀基面高(mm)
200
2
工位数(个)
4
3
装刀基面高(mm)
100
4
单工位转位时间(mm)
3.15
5
刀架转速(s)
17
6
最大切向力矩(r/min)
800
7
最大倾覆力矩(N.m)
2000
8
重复定位精度(mm)
0.005
9
毛重(kg)
71
10
净重(kg)
54
11
箱体尺寸(长宽高)(cm)
56X36X39
AK21200X6安装尺寸图
主要规格和参数:
序号
项目
参数
1
刀台装刀基准面到中心距离(mm)
100
2
工位数(个)
6
3
装刀基准孔高(mm)
125
4
单工位转位时间(mm)
2.66
5
刀架转速(s)
17
6
最大切向力矩(r/min)
800
7
最大倾覆力矩(N.m)
2000
8
重复定位精度(mm)
0.005
9
毛重(kg)
70
10
净重(kg)
54
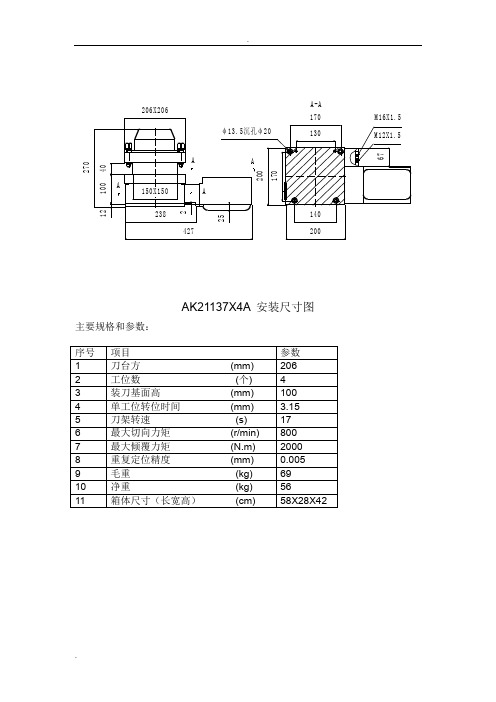
AK21137X4A安装尺寸图
主要规格和参数:
序号
项目
参数
1
刀台方(mm)
206
2
工位数(个)
4
3
装刀基面高(mm)
100
4
单工位转位时间(mm)
3.15
5
刀架转速(s)
17
6
最大切向力矩(r/min)
800
7
最大倾覆力矩(N.m)
2000
8
重复定位精度(mm)
0.005
9
毛重(kg)
69
10
净重(kg)
560
最大倾覆力矩(N.m)
1700
8
重复定位精度(mm)
0.005
9
毛重(kg)
80
10
净重(kg)
68
11
箱体尺寸(长宽高)(cm)
49X34X43
AK21166X4安装尺寸图
主要规格和参数:
序号
项目
参数
1
刀台方(mm)
166
2
工位数(个)
4
3
装刀基面高(mm)
70
4
单工位转位时间(mm)
3.24
81
4
单工位转位时间(mm)
3.16
5
刀架转速(s)
17
6
最大切向力矩(r/min)
800
7
最大倾覆力矩(N.m)
2000
8
重复定位精度(mm)
0.005
9
毛重(kg)
51
10
净重(kg)
39
11
箱体尺寸(长宽高)(cm)
50X35X38
AK21200X4安装尺寸图
主要规格和参数:
序号
项目
参数
1
刀台方(mm)