计算机控制技术实验报告
大学_计算机控制技术实验报告河南工业大学3
实验三最少拍控制算法研究班级:自动F1203班姓名:蔡申申学号:201223910625一、实验目的1.学习并熟悉最少拍控制器的设计和算法;2.研究最少拍控制系统输出采样点间纹波的形成;3.熟悉最少拍无纹波控制系统控制器的设计和实现方法。
二、实验设备1.THBCC-1型信号与系统•控制理论及计算机控制技术实验平2.THBXD数据采集卡一块(含37芯通信线、16芯排线和USB电缆线各1根)3.PC机1台(含软件“THBCC-1”)三、实验内容1.设计并实现具有一个积分环节的二阶系统的最少拍控制。
2.设计并实现具有一个积分环节的二阶系统的最少拍无纹波控制,并通过混合仿真实验,观察该闭环控制系统输出采样点间纹波的消除。
四、实验原理在离散控制系统中,通常把一个采样周期称作一拍。
最少拍系统,也称为最小调整时间系统或最快响应系统。
它是指系统对应于典型的输入具有最快的响应速度,被控量能经过最少采样周期达到设定值,且稳态误差为定值。
显然,这样提出了较为苛刻的要求,即其极点应位于Z平对系统的闭环脉冲传递函数)(z面的坐标原点处。
1.最少拍控制算法计算机控制系统的方框图为:图7-1最少拍计算机控制原理方框图根据上述方框图可知,有限拍系统的闭环脉冲传递函数为:)()(1)()()()()(z HG z D z HG z D z R z C z +==φ (1) )(1)()(11)()()(1z z HG z D z R z E z e φφ-=+== (2) 由(1) 、(2)解得:)()()()(z HG z z z D e φφ= 随动系统的调节时间也就是系统误差)(1kt e 达到零或为一恒值所需的时间,由Z 变换定义可知:⋅⋅⋅⋅⋅⋅++⋅⋅⋅⋅⋅⋅+++==--∞=--∑k k k Z kT e Z T e Z T e e Z kT e Z E )()2()()0()(1)1210111(1有限拍系统就是要求系统在典型的输入信号作用下,当N K ≥时,)(1kT e 恒为零或恒为一常量。
计算机控制技术实验报告.doc

实验三 数字PID 控制器的设计一.实验目的1.研究PID 控制器的参数对系统稳定性和过渡过程的影响2.研究采样周期T 对系统特性的影响3.在matlab 中对系统进行仿真 二.实验原理 三.实验步骤1.在matlab 中新建文档,原系统的开环传递函数:)11.0(1)(+=s s s G k绘制如图1的原系统框图图1 原系统结构图2.给入阶跃信号,开始仿真,双击示波器观察仿真结果,绘制阶跃响应曲线,记录调节时间和超调量3.如图2为PID 控制器图2 PID 控制器得到如图3的模型图图3 加入控制器后的系统.放大环节中的kp (ki 、kd )为自己选择的某一个实数,如设置初始值kp=4(ki=0、kd=0)不是直接输入字母kp (ki 、kd )4.修改kp (ki 、kd ),按照如下步骤观察不同参数值下系统阶跃响应曲线的变化,当系统具有较理想的阶跃响应时,绘制阶跃响应曲线,并记录各参数值和时域性能指标a. Ki=0、Kd=0时,改变Kp 的值;b. 固定Kp ,Kd=0,改变Ki 的值;c. 固定Kp 、Ki 的值,改变Kd 的值;5.保持参数值不变,修改采样时间,观察系统阶跃响应曲线的变化,并记录四:实验结果与分析:1. 在matlab 中新建文档,原系统的开环传递函数:)11.0(1)(+=s s s G k 在Simulink 中建议系统的模型图:给入阶跃信号,开始仿真,双击示波器观察仿真结果,绘制阶跃响应曲线,记录调节时间和超调量:下面是在Simulink 中建立的模型,及示波器中的阶跃响应的曲线。
系统在Simulink 中的模型图:示波器中的阶跃响应曲线图:从上面的图形中可以得到该系统的调节的时间%δ=0;调节时间为2s。
PID 的控制器如图所示:下面是在Simulink中得到系统的模型图:设Kp=1,Ki=0,Kd=0时的波形(采样的时间为-1s):从上面可以看出系统的调节的时间为6秒,超调量为1%左右。
计算机控制技术实验报告(完整版)
前言本指导书是配合自动化专业本科生专业课《计算机控制技术》的课堂教学而编写的实验教材,通过实验的验证能够使学生了解和掌握计算机控制的硬件技术和软件编程方法。
本书共设计了七大类实验,第一类中包含过程通道和数据采集处理方面的几个内容;第二类为数字PWM 发生器和直流电机调速控制的开环实验;第三类包含几种数字PID闭环控制实验;第四类中有两种数字调节器直接设计方法的实验;第五类是一个温度控制系统;第六类是随动系统实验;第七类是过程控制系统的研究;实验五至实验七的内容是带有被控对象的控制系统。
七个实验的全部学时大于计划学时,教师和学生对所做的实验内容可以选择以满足实验计划学时为准。
通过实验学生巩固了课堂教学的内容,也为今后实际工作打下了一定技术基础。
本指导书由王尚君、毛一心老师共同编写,穆志纯教授进行了严格的审阅工作。
由于计算机性能的快速提高,计算机控制的技术手段也在不断出新,书中难免存在不足之处,敬请读者批评指正。
编者2007年10月目录前言 (1)目录 (2)实验一过程通道和数据采集处理 (4)一、输入与输出通道 (4)1. AD 转换实验` (5)2. DA 转换实验` (7)二、信号的采样与保持` (9)1. 零阶保持实验` (9)2. 直线插值实验*` (11)3. 二次曲线插值实验*` (11)三、数字滤波 (15)1. 一阶惯性实验 (16)2. 四点加权实验* (16)实验二开环系统的数字程序控制 (19)数字PWM 发生器和直流电机调速控制 (19)一、实验目的 (19)二、实验内容` (19)三、实验所用仪表及设备 (19)四、实验原理及步骤 (20)五、思考题 (21)六、实验报告内容及要求 (21)实验三数字PID闭环控制 (22)数字PID控制算法 (22)积分分离法PID控制 (23)带死区的PID控制* (27)简易工程法整定PID 参数 (30)扩充临界比例度法 (30)扩充响应曲线法 (32)实验四数字调节器直接设计方法 (36)最小拍控制系统 (36)一、实验目的 (36)二、实验所用仪表及设备` (36)三、实验原理及内容 (36)有纹波最小拍控制系统 (37)无纹波最小拍控制系统 (38)四、实验步骤 (40)五、思考题 (41)六、实验报告内容及要求 (41)实验一过程通道和数据采集处理为了实现计算机对生产过程或现场对象的控制,需要将对象的各种测量参数按要求转换成数字信号送入计算机;经计算机运算、处理后,再转换成适合于对生产过程进行控制的量。
计算机控制技术实训报告
一、实训背景随着科学技术的不断发展,计算机技术在各个领域的应用日益广泛。
计算机控制技术作为自动化领域的重要组成部分,其研究与应用对于提高生产效率、降低成本、改善产品品质等方面具有重要意义。
为了使学生深入了解计算机控制技术,提高动手能力,本实训课程以计算机控制技术为核心,通过实际操作,使学生掌握计算机控制系统的设计、调试和实施方法。
二、实训目的1. 理解计算机控制系统的基本原理和组成;2. 掌握计算机控制系统的设计方法;3. 熟悉计算机控制系统的调试与实施;4. 培养学生团队合作精神和创新意识。
三、实训内容1. 计算机控制系统的基本组成计算机控制系统主要由以下几个部分组成:(1)被控对象:被控对象是指需要通过计算机控制系统进行控制的设备或过程。
(2)传感器:传感器用于将物理量转换为电信号,以便计算机控制系统进行处理。
(3)控制器:控制器是计算机控制系统的核心,负责接收传感器输入信号,根据预设的控制策略进行计算,并输出控制信号。
(4)执行器:执行器根据控制器输出的控制信号,实现对被控对象的调节。
(5)人机界面:人机界面用于人与计算机控制系统之间的交互,包括操作面板、显示器等。
2. 计算机控制系统的设计方法计算机控制系统的设计主要包括以下几个步骤:(1)系统分析:分析被控对象的特点和需求,确定控制目标。
(2)系统建模:根据被控对象的特点,建立数学模型。
(3)控制器设计:根据数学模型和控制目标,选择合适的控制器类型,并进行参数整定。
(4)系统仿真:在计算机上对控制系统进行仿真,验证系统性能。
(5)系统实施:根据仿真结果,对实际控制系统进行调整和优化。
3. 计算机控制系统的调试与实施计算机控制系统的调试主要包括以下几个方面:(1)硬件调试:检查硬件设备是否正常,包括传感器、控制器、执行器等。
(2)软件调试:检查控制算法是否正确,参数是否合理。
(3)系统联调:将硬件和软件结合起来,进行系统联调,验证系统性能。
中北大学 计算机控制技术实验报告.

计算机控制实验报告专业:测控技术与仪器班级:学号:姓名:例1. 已知某单位反馈系统开环传递函数如下: .)12)(1(1)(++=s s s G K 如果采用比例控制器进行调节,试绘制比例系数P K 分别为1、4、10、50时的单位阶跃响应曲线,并分析比例控制器对控制系统性能的影响。
解:求解命令如下:num=1;den=conv([1 1],[2 1]);GK=tf(num,den);Kp=1;sys=feedback(Kp*GK,1,-1);step(sys,'b:');hold ongtext('Kp=1')pauseKp=4;sys=feedback(Kp*GK,1,-1);step(sys,'k-');hold ongtext('Kp=4')pauseKp=10;sys=feedback(Kp*GK,1,-1);step(sys,'g--');hold ongtext('Kp=10')pauseKp=50;sys=feedback(Kp*GK,1,-1);step(sys,'r-');gtext('Kp=50')title('比例控制性能分析')xlabel('时间(秒)')ylabel('幅值')执行上述命令后,可得到不同比例系数下闭环系统单位阶跃响应曲线,如图所比例控制对控制系统性能分析图结论:从图中可以看出,随着比例系数的增加,闭环系统稳态误差减小,上升时间缩短,调节次数增大,最大超调量增大,而且闭环系统稳态误差无法消除。
例2. 已知某单位反馈系统开环传递函数如下:)2)(1(1)(++=s s s G K 如果采用积分(PI )控制器进行调节,试绘制比例系数1=P K 积分系数I K 为0.2、0.8、2.0、5时的单位阶跃响应曲线,并分析积分控制器对控制系统性能的影响。
计算机控制技术实验报告_ 组
实验一A/D与D/A转换一、实验目的1.通过实验了解实验系统的结构与使用方法;2.通过实验了解模拟量通道中模数转换与数模转换的实现方法。
二、实验设备1.THBCC-1型信号与系统•控制理论及计算机控制技术实验平台2.THBXD数据采集卡一块(含37芯通信线、16芯排线和USB电缆线各1根)3.PC机1台(含软件“THBCC-1”)三、实验内容1.输入一定值的电压,测取模数转换的特性,并分析之;2.在上位机输入一十进制代码,完成通道的数模转换实验。
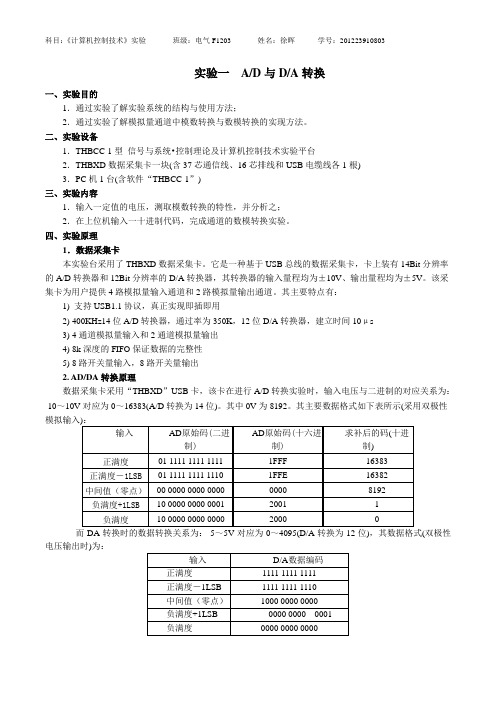
四、实验原理1.数据采集卡本实验台采用了THBXD数据采集卡。
它是一种基于USB总线的数据采集卡,卡上装有14Bit分辨率的A/D转换器和12Bit分辨率的D/A转换器,其转换器的输入量程均为±10V、输出量程均为±5V。
该采集卡为用户提供4路模拟量输入通道和2路模拟量输出通道。
其主要特点有:1) 支持USB1.1协议,真正实现即插即用2) 400KHz14位A/D转换器,通过率为350K,12位D/A转换器,建立时间10μs3) 4通道模拟量输入和2通道模拟量输出4) 8k深度的FIFO保证数据的完整性5) 8路开关量输入,8路开关量输出2. AD/DA转换原理数据采集卡采用“THBXD”USB卡,该卡在进行A/D转换实验时,输入电压与二进制的对应关系为:-10~10V对应为0~16383(A/D转换为14位)。
其中0V为8192。
其主要数据格式如下表所示(采用双极性而DA转换时的数据转换关系为:-5~5V对应为0~4095(D/A转换为12位),其数据格式(双极性电压输出时)为:五、实验步骤1. 启动实验台的“电源总开关”,打开±5、±15V电源。
将“阶跃信号发生器”单元输出端连接到“数据采集接口单元“的“AD1”通道,同时将采集接口单元的“DA1”输出端连接到接口单元的“AD2”输入端;2、将“阶跃信号发生器”的输入电压调节为1V;3. 启动计算机,在桌面双击图标“THBCC-1”软件,在打开的软件界面上点击“开始采集”按钮;4. 点击软件“系统”菜单下的“AD/DA实验”,在AD/DA实验界面上点击“开始”按钮,观测采集卡上AD转换器的转换结果,在输入电压为1V(可以使用面板上的直流数字电压表进行测量)时应为00001100011101(共14位,其中后几位将处于实时刷新状态)。
计算机控制技术实验报告
计算机控制技术实验报告实验一信号的采样与保持一、实验目的1.熟悉信号的采样和保持过程。
2.学习和掌握香农(采样)定理。
3.学习用直线插值法和二次曲线插值法还原信号。
二、实验设备PC 机一台.TD-ACS实验系统一套.i386EX 系统板一块。
三、实验原理香农(采样)定理:若对于一个具有有限频谱(max ωω<)的连续信号)(t f 进行采样.当采样频率满足max 2ωω≥s时.则采样函数)(t f *能无失真地恢复到原来的连续信号)(t f 。
max ω为信号的最高频率.s ω为采样频率。
四.实验内容1.采样与保持编写程序.实现信号通过 A/D 转换器转换成数字量送到控制计算机.计算机再把数字量送到 D/A 转换器输出。
实验线路图如图2-1所示.图中画“○”的线需用户在实验中自行接好.其它线系统已连好。
模数转换单元控制计算机图2-1 采样保持线路图控制计算机的“OUT1”表示386EX 内部1#定时器的输出端.定时器输出的方波周期=定时器时常.“IRQ7”表示386EX 内部主片8259的“7”号中断.用作采样中断。
正弦波单元的“OUT ”端输出周期性的正弦波信号.通过模数转换单元的“IN7”端输入,系统用定时器作为基准时钟(初始化为10ms ).定时采集“IN7”端的信号.转换结束产生采样中断.在中断服务程序中读入转换完的数字量.送到数模转换单元.在“OUT1”端输出相应的模拟信号。
由于数模转换器有输出锁存能力.所以它具有零阶保持器的作用。
采样周期T= TK×10ms .TK 的范围为01~ FFH.通过修改TK 就可以灵活地改变采样周期.后面实验的采样周期设置也是如此。
零阶采样保持程序流程图如图2-2所示。
图2-2 零阶采样保持程序流程图实验步骤:(1)参考流程图2-2编写零阶保持程序.编译、链接。
(2)按照实验线路图2-1接线.检查无误后开启设备电源。
(3)用示波器的表笔测量正弦波单元的“OUT ”端.调节正弦波单元的调幅、调频电位器及拨动开关.使得“OUT ”端输出幅值为3V.周期1S 的正弦波。
计算机控制技术实验报告
实验一过程通道和数据采集处理为了实现计算机对生产过程或现场对象的控制,需要将对象的各种测量参数按要求转换成数字信号送入计算机;经计算机运算、处理后,再转换成适合于对生产过程进行控制的量。
所以在微机和生产过程之间,必须设置信息的传递和变换的连接通道,该通道称为过程通道。
它包括模拟量输入通道、模拟量输出通道、数字量输入通道、数字量输出通道。
模拟量输入通道:主要功能是将随时间连续变化的模拟输入信号变换成数字信号送入计算机,主要有多路转化器、采样保持器和A/D 转换器等组成。
模拟量输出通道:它将计算机输出的数字信号转换为连续的电压或电流信号,主要有D/A 转换器和输出保持器组成。
数字量输入通道:控制系统中,以电平高低和开关通断等两位状态表示的信号称为数字量,这些数据可以作为设备的状态送往计算机。
数字量输出通道:有的执行机构需要开关量控制信号 (如步进电机),计算机可以通过I/O 接口电路或者继电器的断开和闭合来控制。
输入与输出通道本实验教程主要介绍以A/D 和D/A 为主的模拟量输入输出通道,A/D 和D/A 的芯片非常多,这里主要介绍人们最常用的ADC0809 和TLC7528。
一、实验目的1.学习A/D 转换器原理及接口方法,并掌握ADC0809 芯片的使用2.学习D/A 转换器原理及接口方法,并掌握TLC7528 芯片的使用二、实验内容1.编写实验程序,将-5V ~ +5V 的电压作为ADC0809 的模拟量输入,将转换所得的8 位数字量保存于变量中。
2.编写实验程序,实现D/A 转换产生周期性三角波,并用示波器观察波形。
三、实验设备PC 机一台,TD-ACC+实验系统一套,i386EX 系统板一块四、实验原理与步骤1.A/D 转换实验ADC0809 芯片主要包括多路模拟开关和A/D 转换器两部分,其主要特点为:单电源供电、工作时钟CLOCK 最高可达到1200KHz 、8 位分辨率,8 个单端模拟输入端,TTL 电平兼容等,可以很方便地和微处理器接口。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
计算机控制技术实验报告实验一系统认识及程序调试练习实验目的1.掌握TD-ACC+实验教学系统联机软件中的各菜单功能,熟练掌握其中的程序编辑、编译、链接、加载及调试方法。
2.了解TD-ACC+实验教学系统的系统资源及硬件操作环境。
实验设备PC 机一台,TD-ACC+实验系统一套实验内容1.阅读“第一部分i386EX 系统板介绍”,了解TD-ACC+实验教学系统的构成;2.读懂实验程序,对实验程序进行编辑、编译、链接、加载及调试练习。
实验原理调试下列程序:在显示器上显示一行26个英文字母,换行后重复进行。
第一种实现方法:显示两行字母之间的延时时间采用软件延时方式。
实验程序1(采用软件延时方式)CODE SEGMENTASSUME CS:CODESTART: MOV CX,001AH ;显示字符个数(26)→CXMOV AH, 01MOV AL, 13INT 10H ;显示换行CALL DELAY ;调用延时子程序MOV AL,41H ;送字符‘A’的ASCⅡ码AGAIN: MOV AH,01 ;显示一个字符INT 10HINC AL ;下一显示字符的ASCⅡ码LOOP AGAIN ;连续显示26个字母JMP START ;重复进行DELAY: PUSH CX ;延时子程序MOV CX,0FFFFH DEL1: PUSH AX POP AX LOOP DEL1POP CX RET CODE ENDSEND START第二种实现方法:显示两行字母之间的间隔时间用内部定时器8254进行控制,时间到由定时器的OUT 端发出脉冲信号到中断控制器8259的中断信号输入端,向CPU 请求中断,在中断程序中完成显示一行字母的功能。
硬件接线如图1-1,用排线将i386内部1#定时器输出OUT1连接到8259的一个中断请求端IRQ7。
8254与8253类似,它们的编程方式是兼容的,其控制字格式如下:SC 1 SC 0——所选计数器 0 0 计数器0 0 1 计数器1 1 0 计数器2 1 1 无意义 RW 1 RW 0——读/写格式 0 0 锁定当前计数值(供CPU 读取) 0 1 只读/写低8位 1 0 只读/写高8位 1 1 先读/写低8位,后读/写高8位M 2 M 1M 0——工作方式选择 0 0 0 方式0 0 0 1 方式1 X 1 0 方式2 X 1 1 方式3 1 0 0 方式4 1 0 1 方式5 BCD ——计数格式 0 计数器按二进制格式计数 1 计数器按BCD 码格式计数实验程序2(采用定时中断方式) CODE SEGMENTASSUME CS:CODESTART: MOV AX,OFFSET IRQ7;填写8259的7号中断矢量入口地址的偏移量 MOV SI,003CH ;填写8259中断7的中段矢量 MOV [SI],AX ;填偏移量矢量 MOV AX,CS ;填写8259中断矢量入口地址的段地址 MOV SI,003EH ;填写7号中断段地址矢量 MOV [SI],AXCLI ;关系统总中断 CALL SYSINTI ;调用系统初始化子程序 MOV DX,0F043H MOV AL,076H ;初始化1#定时器 OUT DX,ALMOV DX,0F041H图1-1MOV AL,10H ;定时10ms时间常数低8位OUT DX,AL ;写1#定时器定时常数的低字节MOV X,0F041HMOV AL,27H ;定时10ms时间常数高8位OUT DX,AL ;写1#定时器定时常数的高字节MOV BX,64HMOV AH, 01MOV AL, 13INT 10H ;显示换行AGAIN: STI ;打开系统总中断HLT ;停机等待直到有中断产生JMP AGAIN ;继续IRQ7: DEC BXJNZ FINISHMOV BX,64HMOV CX,001AHMOV AL,41HAGAIN1: MOV AH,01INT 10HINC ALLOOP AGAIN1MOV AH, 01MOV AL, 13INT 10HFINISH: MOV AL,20H ;中断结束OUT 20H,ALIRET ;中断返回SYSINTI: MOV AX,8000H ;系统初始化子程序(已保存在机器中)OUT 23H,AL ;扩展IO使能XCHG AL,AHOUT 22H,ALOUT 22H,AXMOV DX,0F822H ;初始化管脚配置P2CFG,配置CS0#MOV AL,70HOUT DX,ALMOV DX,0F824H ;初始化管脚配置P3CFG,配置主片IRQ7MOV AL,0B2HOUT DX,ALMOV DX,0F832H ;初始化管脚配置INTCFGMOV AL,0AHOUT DX,ALMOV DX,0F834H ;初始化管脚配置TMRCFGMOV AL,15H ;将GATE1接VCCOUT DX,ALMOV AL,11H ;初始化主片8259OUT 20H,ALMOV AL,08HOUT 21H,ALMOV AL,04HOUT 21H,ALMOV AL,01HOUT 21H,ALMOV AL,6FH ;写主片8259的中断屏蔽字,允许主片的IRQ7(用OUT 21H,AL 户程序使用)和IRQ4(系统通讯用)MOV AL,11H ;初始化从片8259OUT 0A0H,ALMOV AL,30HOUT 0A1H,ALMOV AL,02HOUT 0A1H,ALMOV AL,01HOUT 0A1H,ALMOV AL,0FFHOUT 0A1H,ALRETCODE ENDSEND START实验步骤1.打开微机及实验系统电源。
2.如提示联机有问题,检查USB及串口通讯线是否正常连接,并按复位按钮(置于实验面板上的i386EX 系统小板上)。
3.编辑程序1。
然后编译链接并加载,如中间出现错误,则按提示进行修改,直至加载成功。
4.按工具栏上的“RUN”按钮执行程序。
5.观察输出窗口的显示内容并记录。
如结果不正确,使用单步、跳过、断点方式运行调试程序。
6.试用单步、跳过、断点方式运行调试程序,记录运行中间寄存器变化及显示结果。
7.编辑程序2。
其中系统初始化子程序已保存在机器上,文件名:c:\shiyan\csh.asm。
打开该文件,将该文件复制粘贴到编辑程序2中。
8.用排线连接控制计算机上的IRQ7与OUT1信号。
9.同步骤5。
10.改变编辑程序2中软件计数器BX的值,调整两行字母之间的显示时间间隔,重复以上步骤。
实验结果实验1-1实验结果实验1-2实验结果结论:改变编辑程序2中软件计数器BX的值,即调整两行字母之间的显示时间间隔,时间调大,两行字母之间的显示时间间隔变长。
实验二D/A转换实验实验目的1.学习掌握D/A转换的基本原理及TLC7528 芯片的性能。
2.学习利用DAC产生连续波形的编程方法。
实验设备PC 机一台,TD-ACC+实验系统一套实验内容编写实验程序,实现D/A转换产生周期性同步的锯齿波和方波(如图2-1),并用虚拟示波器观察波形。
图2-1实验原理本实验采用TLC7528 芯片,它是8 位、并行、两路、电压型输出数模转换器。
其主要参数如下:转换时间100ns,满量程误差1/2 LSB,参考电压-10V ~ +10V,供电电压+5V~+15V,输入逻辑电平与TTL 兼容。
方法一:软件延时控制计算机按一定规律连续输出数据到DAC转换器,转换后产生相应的连续波形。
实验中的锯齿波由数据00H~FFH连续循环输出产生,上升幅度为01个数据量,即每输出一次后数据加一,数据输出的时间间隔由软件延时控制;方波由两个数据00H和FFH交替输出产生,每当锯齿波数据由FFH变到00H(用加一指令即可)时方波变换为另一个数据(00H 变为FFH或FFH变为00H),从而实现两波形的同步效果。
实验平台中的TLC7528 的八位数据线、写信号线和通道选择控制线已接至控制计算机的总线上。
片选线预留出待实验中连接到相应的I/O 片选上,具体如图2-2。
图2-2以上电路是TLC7528 双极性输出电路,输出范围-5V ~ +5V。
“W101”和“W102”分别为A路和B路的调零电位器,实验前先调零,用DEBUG命令直接往TLC7528 的A口和B口中送入数字量80H,分别调节“W101”和“W102”电位器,用万用表分别测“OUT1”和“OUT2”的输出电压,应在0mV 左右。
控制计算机-IOW→数模转换器-WR:IOW为D/A的写信号;控制计算机-IOY1→数模转换器-CS:IOY1为D/A转换器片选信号,其地址可选为0640H~0641H;控制计算机-XD0~XD7→数模转换器- D0~D7:控制计算机的八位数据线接至D/A转换器的八位数据输入端;控制计算机-A0→数模转换器- A0:A0为0选中通道A,为1选中通道B。
参考流程:图2-3程序2-1code segmentassume cs:codemov bl,0hmov bh,0hstart: mov dx,0640hmov al,blout dx,almov dx,0641hmov al,bhout dx,alcall delayinc bljnz startnot bhjmp startdelay: push cxmov cx,0ffhdel1: push axpop axloop del1pop cxretcode endsend start方法二:利用定时器控制输出间隔时间。
同实验一,对控制计算机内的1#计数器编程,定时时间1ms,时间到由定时器OUT1产生的信号接到控制计算机的中断请求IRQ7申请中断,在中断程序中进行D/A数据输出。
自行设计接线图及程序流程图。
图2-3程序2-2:DA1_ADDR EQU 0640HDA2_ADDR EQU 0641HSTACK1 SEGMENT STACKDW 256 DUP(?)STACK1 ENDSCODE SEGMENTASSUME CS:CODESTART: C ALL SYSINTI ;调用系统初始化子程序MOV BL,00H ;赋D/A输出初值0MOV BH,10HAGAIN: CALL DELAYMOV AL,BLMOV DX,DA1_ADDR ;选择数模转换单元的OUT1端作为模拟量的输出OUT DX,AL ;D/A输出当前AL中的值MOV AL,BHMOV DX,DA2_ADDROUT DX,ALINC BLNOT BH ;AL加一,准备下一次D/A输出值JNZ AGAINDELAY: PUSH CX ;延时子程序MOV CX,0200HDEL1: PUSH AXPOP AXLOOP DEL1POP CXRETSYSINTI: MOV AX,8000H ;系统初始化子程序OUT 23H,AL ;扩展IO使能XCHG AL,AHOUT 22H,ALOUT 22H,AXMOV DX,0F822H ;初始化管脚配置P2CFG,配置CS0#MOV AL,70HOUT DX,ALMOV DX,0F824H ;初始化管脚配置P3CFG,配置主片IRQ7MOV AL,0B2HOUT DX,ALMOV DX,0F832H ;初始化管脚配置INTCFGMOV AL,0AHOUT DX,ALMOV DX,0F834H ;初始化管脚配置TMRCFGMOV AL,15H ;将GATE1接VCCOUT DX,ALRETCODE ENDSEND START实验步骤1.按图接线,画“о”的线需自行连接,不带“о”的线电路板上已连好无须连接。