盾构施工人工测量与自动测量技术探讨
盾构法施工中的测量技术分析

盾构法施工中的测量技术分析摘要:地铁建设大多采用盾构法进行区间隧道施工,而盾构法对测量精度的要求较高,测量人员需结合现场情况,采用合适的测量方法提高测量精度,从而为盾构法施工提供技术保障。
关键词:城市轨道;地铁建设;盾构法;测量技术;为缓解城市的交通压力,各大城市均在规划修建地铁,而地铁建设大多采用盾构法进行区间隧道施工,同时盾构法施工也越来越多的应用在公路、电力、供排水、通信等施工领域。
而盾构法对测量精度的要求较高,测量人员需结合现场情况,采用合适的测量方法提高测量精度,从而为盾构法施工提供技术保障。
本文主要对盾构施工中的测量有关内容进行全面分析和梳理:一、关于盾构法施工测量的内容在地铁建设开展前,测量人员需构建切实可行的平面及高程控制系统,确保测量成果的及时性和准确性。
在明确测量方法、精度标准之后,测量实际工作大致可分为两部分:第一,地面控制测量工作。
在工程开始之前,业主移交控制点之后,测量人员需要对地面控制点的坐标进行复测,以评估移交控制点坐标的准确性是否满足施工需要。
该测量成果必须经多级测量复核确认,并周期性的开展复测工作。
地面控制测量分为平面控制测量和高程控制测量。
平面控制测量有三角测量法、精密导线法和GPS定位法等测量方法,高程控制测量有常规水准测量法和三角高程测量法。
实际施工测量常采用精密导线法和常规水准测量法复测确定测量控制点。
第二,联系测量工作。
工程开始后,需将地面平面坐标系统和高程系统传递到地下施工区域以便指导地下施工,此项传递数据的工作称为联系测量。
联系测量分为平面定向测量和高程传递测量。
其中高程传递测量有钢尺传递法和测距仪传递法两种测量方法;定向测量有一井定向,二井定向和陀螺仪定向等测量方法。
实际施工中常用钢尺传递法和二井定向传递地面坐标,在较长的隧道施工中,还要增加陀螺仪定向来验证联系测量成果。
(一)常用测量方法的特点1、精密导线法:精密导线测量是指精度达到相邻点位的相对中误差不超过1:120 000的导线测量,一般指国家二等或二等以上的导线测量。
浅谈地铁盾构施工测量控制

浅谈地铁盾构施工测量控制随着城市化进程的不断推进,地铁成为大多数城市公共交通的重要组成部分。
地铁的建设方式有多种,其中盾构施工技术的应用越来越普及。
盾构施工是一种高效、安全、环保的施工方式,在地铁建设中起到了重要作用。
然而,盾构施工的实施也需要进行测量控制,以确保施工的准确性和安全性。
一、盾构施工的基本原理盾构施工是利用盾构机在地下开挖隧道,施工过程中需要控制盾构机的前进方向、水平位置、高度和姿态等参数,以确保施工的准确性和安全性。
一般来说,盾构机的控制是基于激光测距、GPS定位、惯性导航等技术实现的。
其中,激光测距技术被广泛应用于盾构施工中,通过在隧道内设置一定数量的反射板和激光探头,实现对盾构机位置和姿态的准确测量。
盾构施工的测量控制是保证施工准确性和安全性的基础工作。
盾构施工的测量控制主要包括三个方面:前方探测、导向系统和盾构机机身控制。
1. 前方探测前方探测是盾构施工中最为重要的环节之一,通常采用激光测距的方式完成。
前方探测即指对盾构机前方的掘进面进行测量控制,以保证盾构机的前进方向和姿态的准确性。
前方探测系统包括激光探头、反射板以及控制系统。
在施工前需要先在盾构机前方设置一定数量的反射板,然后在探头和参考平面之间发射激光,通过激光探测和反射板的反射,计算出盾构机前方的距离和位置,再通过控制系统控制盾构机的前进方向和姿态,以确保盾构机准确掘进。
2. 导向系统导向系统是盾构施工中另一个重要的环节,通过导向系统,可以保证盾构机沿着设计线路掘进,避免偏离和偏移。
导向系统通常包括传感器、控制系统和电动执行器等组件。
传感器可以实时测量盾构机的位置和姿态信息,并将数据发送到控制系统。
控制系统通过处理传感器数据,控制电动执行器的转动,实现盾构机的精确定位和导向。
3. 盾构机机身控制盾构机机身控制是盾构施工中最基本的一环,确保盾构机的前进和掘进位置的准确定位,同时还可以实现其他功能,如掘进速度控制、盾构机的转向、后备推进等。
浅谈地铁盾构法隧道施工测量技术
浅谈地铁盾构法隧道施工测量技术摘要:本文结合珠江三角洲城际城际快速轨道交通广州至佛山段土建工程盾构法隧道施工测量的实践,介绍地铁盾构法隧道施工中的控制测量、联系测量、ROBOTEC自动测量系统、盾构姿态人工检测、管环片测量等,其中ROBOTEC自动测量系统的应用和维护经验是本文的重点。
关键词:盾构;隧道;测量; ROBOTEC自动测量系统;贯通引言在城市轨道快速发展的今天,特别是在盾构法隧道机内台车狭小的空间里,既要满足施工过程中材料的运输,又要经常性对盾构姿态进行人工测量。
人工测量占用时间和空间,故无法满足快速.准确的施工要求,为解决这一问题我们引用了ROBOTEC自动测量系统,将其架设在台车的左上方对盾构姿态随时进行自动测量,节约了时间,这一方法有效提高施工速度和增加了经济效益1.控制测量1.1 地面平面控制测量针对于平面测量在地铁领域的应用,主要是分为两级布局控制网,即GPS控制网以及精密导线控制网。
据以往隧道施工测量经验和本次隧道贯通误差的规定,根据《工程测量规范》中的有关规定,采用高精度全站仪以测角.测距精密导线网作为隧道地面平面控制测量方法,测量导线按三等导线精度要求进行。
地面控制导线网尽量利用业主提供的控制点,适当加设少量导线点,基本上按照线路走向布设,采用附和导线多测回测量的方式,提高测量精度,增加复核条件,增加各开挖洞口的控制桩个数和观测检查方向,以及将施工测量的精度结果与业主的测量成果进行比较。
1.2 地面高程控制测量地面高程控制网是在城市二等水准点下布设的精密水准网,常规水准测量按城市二等水准精度指标要求,根据业主所给的所有水准基点,布设附和导线,进行高程计算和平差,复核各个水准点的高程。
与平面控制网进行联测,测定各个平面控制点的高程。
隧道进出洞口设置2个以上水准点,按闭合路线测量并进行严密平差。
精密水准点选在离施工场地变形区外稳固的地方,墙上水准点选在永久性建筑物上。
水准点点位应便于寻找.保存和引测。
浅谈地铁盾构施工测量控制

浅谈地铁盾构施工测量控制地铁盾构施工测量控制是地铁建设工程中的重要环节,通过科学的测量控制,可以确保盾构施工的质量和安全。
盾构施工是地铁建设中的关键工程,对盾构施工的测量控制,既要保证施工的精度和质量,又要确保安全生产,因此浅谈地铁盾构施工测量控制是非常必要的。
一、地铁盾构施工的特点地铁盾构施工是一种特殊的土木工程施工方式,其施工特点主要包括以下几个方面:1. 地下施工环境复杂:盾构机在地下开挖,受到地下水、地下岩体等因素的影响,施工环境复杂,要求施工测量控制具有一定的适应性和灵活性。
2. 施工工艺复杂:盾构施工需要经过多道工序,包括土方开挖、支护、管片安装等多个环节,施工测量控制需要覆盖施工全过程,保证各个环节的质量和精度。
3. 安全风险大:盾构施工可能受到地下水涌、地下岩体崩塌等安全风险的影响,测量控制需要及时识别和应对安全风险,确保施工安全。
二、地铁盾构施工测量控制的要点地铁盾构施工测量控制是地铁建设工程中的关键环节,主要包括以下几个要点:1. 测量基准确定:地铁盾构施工需要依托一定的测量基准,确定地下隧道的位置和方向,建立施工坐标系。
测量基准的确定需要考虑地下地质特征、工程控制要求等因素,确保测量基准的准确性和稳定性。
2. 盾构机控制:盾构机在施工过程中需要保持一定的位置和方向,控制盾构机的位置和姿态。
盾构机的位置和姿态控制需要依托测量技术,包括全站仪、导线法等,确保盾构机在施工过程中的精度和稳定性。
3. 施工质量控制:盾构施工过程中需要对土方开挖、管片安装等工序进行测量控制,确保施工质量和精度。
测量控制需要依托现代测量技术,包括全站仪、卫星定位等,对施工过程进行实时监测和控制。
4. 安全监测及应对:地铁盾构施工过程中可能受到地下水涌、地下岩体崩塌等安全风险的影响,需要进行安全监测及应对。
安全监测需要依托现代监测技术,包括地下水位监测、地下岩体位移监测等,确保施工过程中及时识别和应对安全风险。
浅谈地铁盾构隧道施工测量技术

浅谈地铁盾构隧道施工测量技术摘要:近年来,随着我国经济的快速发展以及城镇化进程的加快,城市人口不断增加,城市交通拥堵问题越来越突出,因此发展城市轨道交通、缓解紧张的交通运输压力也日益成为各大城市迫切需要解决的问题。
与其他交通形式相比,地铁以运量大、快速、准时、节能环保及安全舒适等特点受到了各大中型城市的青睐,也逐渐成为城市展示经济实力、城市化建设程度以及高新技术应用的重要标志。
关键词:地铁盾构;隧道施工;测量技术盾构法施工是一种先进的隧道施工技术,与其他施工技术相比较,盾构施工引起的地表沉降较小,对施工现场周围环境的影响小,是目前地铁隧道施工中最安全有效也是应用最广泛的施工方法。
本文结合某市地铁隧道盾构施工测量工作的具体问题和实际做法,总结出了某市地铁盾构施工建设各个阶段测量工作的要点,提出了一种适用于某市地铁盾构施工的的测量流程,以便为某市后续线路的建设提供测量依据,并且也能为其他地区和单位的地铁盾构施工测量管理提供一个有价值的参考。
一、盾构施工测量简介盾构隧道施工测量是指为盾构掘进施工和管片拼装符合设计要求而进行的测量工作。
盾构施工测量工作主要内容包括地面控制测量、联系测量、地下控制测量、和贯通测量等。
二、盾构施工测量1、设计数据的复核工程准备开工时,应进行图纸会审。
图纸会审时,测量人员应根据图纸线路参数对盾构掘进轴线(隧道中线)三维坐标进行计算,计算资料必须做到两人独立计算复核,必要时经过第三者计算复核或用不同的方法进行计算复核,对比检查,自检合格后报监理单位及第三方控制测量单位复核,经多方确认的盾构轴线坐标数据由相关方各执一份,作为以后施工过程轴线偏位检查的重要依据。
2、盾构设计数据的导入验收盾构施工隧道中线坐标进行计算完成之后,土建施工单位要将计算得到的数据导入到盾构机导向系统,这个过程要求业主、土建施工单位、监理单位和第三方控制测量单位共同参与,验收无误后要求各方签字确认,并且拍照留存。
地铁盾构施工人工测量方法探讨
地铁盾构施工人工测量方法探讨摘要:本文结合合肥地铁项目,讲述了地面控制测量、联系测量盾构机人工测量和管片测量关键词:地铁;盾构;人工测量盾构法具有施工速度快、机械化程度高、人员配备少、不影响地面交通等优点,所以在地铁区间施工中得到广泛应用。
盾构施工测量是盾构施工中最重要的环节之一。
现以合肥市地铁一号线9标南宁路站~贵阳路站盾构区间(以下简称南贵区间)介绍盾构施工人工测量方法。
一、控制测量1、地面控制测量地面控制测量分为地面平面控制测量和地面高程控制测量,本工程控制点是合肥轨道公司提供的覆盖线路的整体控制网。
2、联系测量首先测设近井点。
根据地面控制点在贵阳路站区间布设两个近井点,形成闭合导线,导线变数4条。
高程按照二等水准进行加密。
通过近井点用两井定向把控制点加密到贵阳路站底板。
为提高精度,盾构始发点采用强制对中装置(如图1所示)。
高程传递采用吊钢尺的方法。
从始发到接收共做了三次联系测量,三次测量方位角差值不到1″(表1所示)。
3、洞内导线测量本工程隧道长度582米,则隧道导线加密采用支导线往返测的方法进行。
二、盾构机始发前测量1、在盾构机始发前利用联系测量控制点,满足盾构机组装、反力架、轨道安装的需要。
其三维坐标值测设值与设计值较差小于3毫米。
2、盾构机姿态测量。
在盾构始发前测设盾构机初始位置和盾构机姿态。
盾构机自身导向系统成果必须和人工测量结果一致。
本工程使用的是力信RMS-D导向系统。
盾构初始姿态我们利用特征点发和分中发分别独立测量了,两次结果一致。
盾构初始姿态测量,是盾构测量独有的测量。
三、盾构管片测量盾构机在推进过程中,利用力信RMS-D导向系统,控制盾构机本身姿态。
但是管片测量也不可忽视。
可以利用管片测量结果观察隧道推进情况。
做到多重复合。
人工测量管片使用的是标尺法(如图2所示),测设出反射片的三维坐标,根据隧道半径算出隧道中心。
现已310环隧道导向系统测量姿态和人工测量管片姿态为例进行比较。
盾构新型自动导向测量系统研究
为保 障地 铁 隧道施 工 中盾 构机 的 导 向精度 , 2 0 世纪9 O 年 代初 我 国施 工 人
员 已经掌 握 了一 套人 工测 量 、 计 算盾 构 姿态 的有 效方 法 。这 套 方法 虽 然 随测
量仪 器 升级换 代 有 了很 多变 化 , 仍然 是 隧道 施工 的 必要 和不 足
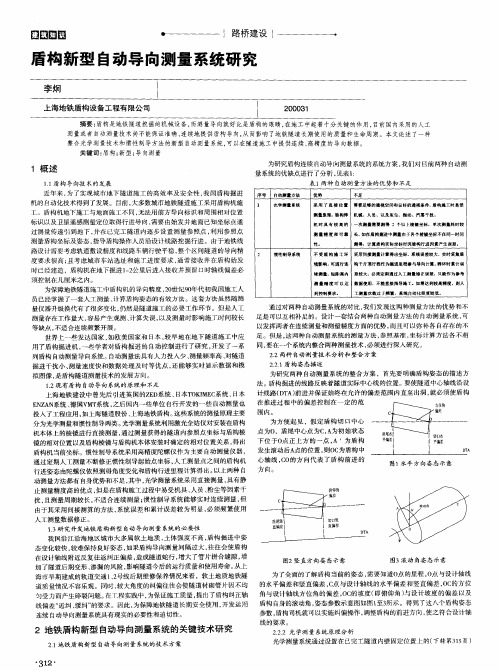
序号 冉动涮量方法 优势 不 足
近年 来 , 为 了实现 城 市 地 下隧 道 施工 的高 效率 及 安全 性 , 我 国 盾构 掘 进 机的 自动 化技 术 得到 了发 展 。 目前 , 大 多数城 市 地铁 隧 道施 工采 用 盾构 机 施 工 。盾构 机地 下 施工 与地 面施 工 不 同 , 无法 用前 方导 向标识 和 周 围相对 位 置 标识 以 及卫 星遥 感测 量 定位 取得 行进 导 向 , 需要 由始发 井 地面 已 知坐标 点通
1 . 2 现 有盾 构 自动 导 向 系统 的 原理 和 不足
2 . 2两种 自动测 量技 术分析 和 整合 方案
2 . 2 1盾 构姿 态描 述
为 研究 两 种 自动 测 量 系统 的 整 合方 案 ,首 先 要 明确 盾 构姿 态 的 描述 方 法 。盾构 掘 进的 线路 反 映着 隧道 实 际 中心线 的位 置 。 要 使 隧道 中心 轴线 沿设
须 控制 在 几厘 米 之内 。
性.
涮得.计 算腐绚安酥坐标 时曝后构 行进因素产生 误差。
惯性制导蕉 坑
受 腊 梅 施 工王 f = 采用间接 测量计算褥 出 坐 标. 囊 绕误基投 犬. 实对采羹 盾
境影 响, 可进 行涟 掏千 斤 顶 行程作为掘进 壁程参 与导向计算 . 辞环时 曼 诗 误 续蠢量, 醺雕 寓内 差较 大, 必须 定期通过人 工 铡 曩捧 正 撰差 ,只 齄作 为参考 灏 量精 度 可 以选 教据使 用.不能直接指导 艟工.妞搿选到 较离精度,则人 到掩制要求 . 工涮 量次数过 r频繁.系统 内动化程度段 低.
试论隧道盾构法施工中的测量技术

试论隧道盾构法施工中的测量技术盾构法在应用的过程中不会对周围的土壤环境造成较大的影响、不用消耗太多人力、施工安全高效、不影响地面交通、整体的适应性比较强,所以在隧道施工中应用的较为普遍。
但是隧道在施工的过程中整体的距离比较长,前方路段设备比较多,整体施工环境较为复杂,在开展测量工作的过程中就存在着许多困难,想要保证各方面测量数据的精准性,则需要选择合理的测量手段,为隧道盾构法施工的安全、高效提供保障。
一、主要工程阶段测量1、联系测量在盾构隧道贯通测量中竖井联系测量是重要的组成部分,在所有检测缓解当中占据重要地位。
竖井联系测量主要作用是将地面控制点的坐标、方位角和高程传递到地下隧道当中,这样一来地上和地下的控制网就被联系在同一个平面和高程系统当中,从而测算出隧道施工的相关数据,指导盾构机的推进,保证隧道的正确贯通。
2、始发测量(1)测量盾构机安装。
盾构机安装主要包括两个部分,即反力架和始发台,两者可以在盾构机始发时提供初始推力以及初始的空间姿态。
在安装反力架和始发台时,需要注意以下几点:反力架左右偏差应控制在±10mm之内,高程偏差应控制在±5mm之内,上下偏差应控制在±10mm之内。
始发台水平轴线的垂直方向与反力架的夹角偏差应在±2‰范围内,盾构姿态与设计轴线竖直趋势偏差应小于±2‰,水平趋势偏差应在±3‰范围内,轴线方位角误差应控制在合理范围内。
注意一定要保证如上几点,不然会影响盾构机的正常运行,影响工作状态甚至发生危险。
(2)测量定位盾构机导轨。
测量定位盾构机导轨注意点很多,主要注意事项有:保证原设计的隧道中线与施工中控制导轨的中线偏差不能超限,保证坚实平整的导轨基面。
(3)测量初始盾构机姿态。
在测量初始盾构机姿态时重点测量盾构机刀盘中心三维坐标以及俯仰角、横摆角、扭转角等方面。
盾构机姿态控制是盾构机应用过程中的重要内容,其对后续的测量结果有着直接影响,对其进行质量上的控制可以保证施工精度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
盾构施工人工测量与自动测量技术探讨
发表时间:2018-09-17T09:47:03.810Z 来源:《基层建设》2018年第20期作者:王强1 毛俊涛2
[导读] 摘要:随着城市建设的飞速发展,我国在各大城市都开展了地铁建设,为了满足盾构掘进按设计要求贯通(贯通误差必须小于
±50mm),必须研究每一步测量工作所带来的误差,包括地面控制测量,竖井联系测量,地下导线测量,盾构机姿态定位测量4个阶段。
1浙江省大成建设集团有限公司 310012;2杭州市地铁集团有限责任公司运营分公司 310014
摘要:随着城市建设的飞速发展,我国在各大城市都开展了地铁建设,为了满足盾构掘进按设计要求贯通(贯通误差必须小于
±50mm),必须研究每一步测量工作所带来的误差,包括地面控制测量,竖井联系测量,地下导线测量,盾构机姿态定位测量4个阶段。
关键词:盾构施工;人工测量;自动测量技术
盾构法具有施工速度快、机械化程度高、人员配备少、不影响地面交通等优点,所以在地铁区间施工中得到广泛应用。
盾构施工测量是盾构施工中最重要的环节之一。
1工程概况
上海市轨道交通12号线顾戴路站~东兰路站区间:区间出顾戴路站端头井后下穿顾戴路北侧规划公园,自顾戴路折向万源路,然后沿万源路下向北进行,下穿万源路地块后,线路左、右线分离,分别从东西侧绕僻万源路桥桩基,下穿漕河泾港。
过东兰路后进入东兰路站。
本段区间较长,里程范围为SK+411.527~SK5+080.520,长度为1668.993。
上行线有5段曲线,曲线半径依次为370m、1200m、650m、
1000m、1000m。
线路纵断面最小坡度2‰,最大坡度25‰。
隧道覆土最小为10.0m,最大为22.2m。
本区间为双线单圆盾构区间,在最低点设置旁通道(兼排水泵站)1座。
2盾构掘进测量
2.1人工测量
(1)盾构测量标志的安装及测定测量标志由前靶、后靶、横向坡度、纵向坡度组成,具体实物为前后测量徕卡反射贴片和坡度板(纵向和横向坡度都可测),进行安装时,先测量出盾构的轴线,并把贴片和坡度板固定在盾构中心线上,前标后标应具有足够的长度,前靶距切口越近越好。
测量出前靶、后靶到盾构中心线的距离以及前靶到切口的距离、后靶到盾尾距离,以确定前后靶与切口盾尾坐标归算的几何关系。
为确保整个施工期间不被破坏,设置保护记号,此项工作应有原始记录和校核记录,以免盾构标志数据中存在系统误差。
初次测量时,用仪器照准前、后占牌各测量一个测回,再根据坡度板的数值确定盾构的初始姿态,方便盾构始发及时纠正。
(2)人工测量的相关计算确定好前后靶与切口盾尾坐标归算的几何关系后,编制相关计算器程序,人工测量主要测设前标水平角,后标水平角,前标垂直角,后标垂直角,坡度和转角。
人工测量仪器为经纬仪和坡度板。
测设完相关数据后进行计算。
①盾构计算:坡度W和转角U在坡度板上直接读出;设W=2.546m为前标至盾构中心轴线的距离,Z=2.391为后标至盾构中心轴线的距离;G、H为经纬仪所在测站X、Y坐标,L为测站到后标方位角,R为经纬仪棱镜高程;I=1.2×T-x:I为经纬仪所在测站到前标的平距,T为当前环号,根据所测当前环号,反算得x,x是测站到第一环的距离。
每次转站都要更新。
N=1.2×T-y:N为经纬仪所在测站到后标的平距,原理同上;K=测站里程+I+5.308:K为切口里程,5.308是前标到切口的距离。
测站的里程,是从第一个测站开始累加起来,每次加上新测站到上一测站的平距;E=X-arcsin ((sinU×Z)÷N)+L-180:X为后标水平角,E为修正过的测站到后标的水平方位角;F=Y-arcsin((sinU×W)÷I)+L-180:Y为前标水平角,F为修正过的测站到前标的水平角;A=G+I×cosF:B=H+I×sinF:C=G+N×cosE:D=H+N×sinE;"QKZ"=R+I×cosQ+(1-cosU)×W-W+5.3082"DWZ"=R+I×cosQ+(1-cosU)×W-W-3.8252Q为前标垂直角;POL(C-A,D-B):
E=J+180"QKX"=A+5.308×cosE"QKY"=B+5.308×cosE"DWX"=C+1.326×cosE"DWY"=D+1.326×cosE得出三维坐标与设计轴线比较即可得出偏差。
②管片姿态测量管片姿态=盾构轴线上管片拼装位置的偏离值计算+管片偏离盾构轴线计算的叠加。
A、B、C、D分别为管片拼装完成后上右下左与盾壳之间间隙;E、O为切口平偏和高偏,G、Q为盾尾平偏和高偏;K=测站里程+I+5.308-6.73;K为管片里程,6.73为切口至当前环拼装好的管片的距离;"SPZJ"=5550-A-C;为水平直径"CZZJ"=5550-B-D;为垂直直径"GPC"=(L-S)
÷L×G+S÷L×E+(C-A)÷2000"GGC"=S÷L×O+(L-S)÷L×Q+(B-D)÷2000L为盾构长度,S为管片前端至盾尾的距离。
2.2自动测量
为了做到对盾构机姿态的实时控制,盾构机掘进中采用盾构姿态自动监测系统。
该系统是盾构机自动导向测量系统,采用ROBOTEC 隧道导向系统,具有国际先进水平,适用于隧道工程施工控制的自动测量系统。
采用该系统能够确保实时、准确地控制隧道掘进,保证贯通的精度。
(1)自动测量导向系统本自动测量系统安装了3个棱镜,前靶一个,后靶两个(只用一个,一个备用),安装测定与人工测量相同。
在盾构始发前,对整条隧道每一米的三维坐标计算出来,输入自动测量系统,方便实测数据与其对比计算偏差。
(2)自动测量盾构姿态计算原理盾构机作为一个近似的圆柱体,在开挖掘进过程中我们不能直接测量其刀盘及盾尾的中心坐标,只能用间接法来推算出中心的坐标。
A点是盾构机刀盘中心,E点是盾构机盾尾断面中心点,即AE连线为盾构机的中心轴线,布置三个自动棱镜B、C、D。
由A、B、C、D、四点构成一个四面体,在盾构始发前测量出B、C、D三个角点的三维坐标(xi,yi,zi)和刀盘盾尾中心的三维坐标,建立几何关系。
根据三个点的三维坐标(xi,yi,zi)分别计算出LAB,LAC,LAD,LBC,LBD,LCD,四面体中的6条边长,作为以后计算的初始值,在盾构机掘进过程中Li是不变的常量,通过对B、C、D三点的三维坐标测量来计算出A点的三维坐标。
同理,B、C、D、E四点也构成一个四面体,相应地求得E点的三维坐标。
由A、E两点的三维坐标就能计算出盾构机刀盘中心的水平偏航,垂直偏航,由B、C、D三点的三维坐标就能确定盾构机的仰俯角和滚动角,从而达到检测盾构机姿态的目的。
3两套测量控制技术的比较
两套测量系统、相互校核,不断修正,主要相互验证测量数据计算的准确性和测量仪器的误差。
通过比较两者最大相差在2厘米左右,在规定的容许范围之内。
依据自动测量系统提供的数据进行推进,管片脱出盾尾后对管环进行复测,可发现偏差基本都在5cm之内,所以本工程大部分数据依据自动测量系统,节省大量劳动力。
4总结
上海市轨道交通12号线顾戴路站~东兰路站区间区间长度为1668.993m,是一般隧道的2倍左右,且曲线多、部分曲线急且长,导致导线边数多且部分导线长度较短,而这些导线又不能闭合,直接导致盾构贯通误差的增大。
在半径为350m的小曲线推进时,由于隧道曲率大,前方可视距离短,导致自动与人工测量移站频繁。
在本工程中,在R=350m的圆曲线隧道上,平均要20环(24m)换站一次。
每次换站
完成后,进行一次测量复核,调整自动与人工测量的相关数据。
由于测量距离短,测量站安装在尚未完全稳定的管片上,所以每次换站完成后,高程数据总有一定的变化。
为了保证测量数据的准确性,每天进行一次复核,及时调整相关数据。
这些因素给本区间的盾构推进导向测量工作增加了很大的难度,为了本区间盾构的顺利推进和准确进洞贯通,就必须制订周密的导向测量方案,并且在导向测量技术应用中采取合理有效的措施。
5结论
把计算得出的盾构机姿态与自动导向系统在计算机屏幕上显示的姿态作比较,根据实践经验,只要两者的差值不大于10mm,就可以认为自动导向系统是正确的。
在某地铁六号线某盾构标段已推进的300多米隧道中,曾多次采用棱镜法检核盾构机姿态,两者的偏差值较差均不大于10mm,证明了该方法在检核自动导向系统的正确性是可靠有效的。
参考文献: [1]邱明明,杨果林,吴镇清,姜安龙,林宇亮.双孔平行地铁隧道盾构施工地表沉降分布规律研究[J].现代隧道技术,2017,54(02):96-105.
[2]胡长明,陆征宇,梅源,张文萃,张钰.软土地层地铁盾构施工风险可拓评估方法研究[J].安全与环境学报,2017,17(01):21-26.
[3]陈鑫超.地铁盾构施工引起的地表沉降研究[D].南京理工大学,2017.
[4]王志良,瞿嘉安,申林方,徐则民,丁祖德.泥炭质土层盾构施工扰动引起隧道长期沉降的研究[J].岩土工程学报,2017,39(08):1416-1424.。