基于熵概念机器人动态误差理论主要评价公式的推导
熵理论中熵及熵权计算式的不足与修正

张近乐 , 任
杰 : 熵理论中 熵及熵权计算式的不足与修正
1 与 X 2 相近, 权重相近, 从而缓和了熵值权重 y 1, 即 X 的跳跃现象, 说明 X 越大, 对跳跃现象的修正效果
式后 , 既可解决前述特殊情况下出现的问题, 又将其 对熵权的影响控制在了合理的范围之内 ( 可使其微 变在小数点后 2 位或之后 ) 。 证明 : 传统的熵权计算式出现 / 熵值十分相近 , 熵权存在较大误差0 这种情况的原因在于 : 当 H i y 1 时, 由式 Xi = 1- Hi mi= 1
j= 1
E ac
n
, 且/ 假
三、 熵权计算公式的不足与修正
传统的熵权计算公式为 [ 2] 194 1- Hi 1- H i Xi = m = m E (1 - H i) m - E H i
i= 1 i= 1
ij
定0 : 当 acij = 0, P ij = 0 时 , P ij ln P ij = 0, 这是因为 , 当 P ij = 0 时 , ln P ij 在数学上无意义。 本文对概率计算公式给予了修正, 即: 将 P ij 重新 定义为 P ij = acij + 10
一、 引
言
度 , 也可以用熵值来判断某个指标的离散程度。 100 多年来 , 由于熵概念的泛化 , 经过诸多学者 的不懈钻研和应用, 熵不仅在自然科学中得到广泛 应用, 而且在社会科学和管理科学领域的研究中得 到越来越多的应用, 熵已被许多学者认为是自然科 学与社会科学的交叉点
[ 1] 42- 43
i
m
1, 0 [ Xi [ 1, ( i = 1, 2, 3, ,, m) 。
本文中 , 为了既保证对上述熵权跳跃现象的微 小修正 , 同时又不影响风险值的宏观结果以及对风 险的分 析与 比较 , 取 C = m- 1 , m = 10, 即 : X = 1 (1 - H i)。 之所以 m 取值为 10 , 是因为在实际 10 iE = 1 应用中 , 指标过多、 过少都不利或不便于对系统 ( 或 对象) 进行判断与评估( 指标较少时 , 无法准确反映 系统的判断属性, 而指标过多时 , 会使系统的判断属 性过于复杂) , 现实中通常 m = 3 ~ 10。 而取 C = m 及 m > 10, 会使计算在未改变修正精度的情况 下变得较为复杂。
imu 误差传递公式推导
imu 误差传递公式推导(原创实用版)目录1.引言2.IMU 的概述3.误差传递公式的推导过程4.结论正文1.引言惯性测量单元(IMU)是一种常用于测量物体运动状态的设备,主要包括加速度计和陀螺仪。
IMU 在各种领域都有广泛应用,如无人驾驶、机器人导航、虚拟现实等。
然而,IMU 在测量过程中会引入一定的误差,为了提高测量精度,需要研究误差传递公式。
2.IMU 的概述IMU 主要由加速度计和陀螺仪组成,可以实时测量物体的加速度和角速度。
加速度计用来测量物体在三维空间中的加速度,而陀螺仪则用来测量物体围绕三个正交轴的角速度。
IMU 的测量结果可以用于计算物体的位置、速度和姿态。
3.误差传递公式的推导过程在推导误差传递公式之前,需要先了解一些基本概念。
首先,加速度计的测量误差可以表示为:Δa = a - a_true,其中Δa 表示测量误差,a 表示测量值,a_true 表示真实值。
同样,陀螺仪的测量误差可以表示为:Δω = ω - ω_true。
误差传递公式描述了 IMU 测量误差如何影响物体的姿态。
根据欧拉角和四元数的关系,可以将误差传递公式表示为:ΔT = T_true - T其中,ΔT 表示姿态误差,T_true 表示真实姿态,T 表示测量姿态。
将加速度计和陀螺仪的误差传递公式代入ΔT 的公式中,可以得到:ΔT = [Δa_x, Δa_y, Δa_z, Δω_x, Δω_y, Δω_z]^T * [1, 0, 0, 0, 1, 0]^T其中,^T 表示转置。
根据矩阵乘法,可以计算出各个分量的误差传递:ΔT_x = Δa_z * Δω_y - Δa_y * Δω_zΔT_y = Δa_x * Δω_z - Δa_z * Δω_xΔT_z = Δa_y * Δω_x - Δa_x * Δω_y4.结论通过推导误差传递公式,可以了解到 IMU 测量误差如何影响物体的姿态。
这为进一步研究 IMU 误差补偿方法提供了理论依据。
基于熵概念机器人动态误差理论主要评价公式的推导
于是得到某一 t 时刻输入参数之一 p2 (
t 2)
的概率分布密度:
1, 2, 3, 4,
=
1 3 4
S4 x
y
z
p R [ h1 (
s4,
x , y ) , h3 ( 1, 2 , 3 , S 4, x , y ) , s1 ( s 4 , z ) , ( 1 , 2, 3 , 4) , 1 , x , y , z ] | J | d 1d 3 d 4 d s 4d x dy d z ( 14) t t t 同理可求得 p 3 ( 3) , p 4 ( 4) , p 5 ( s 4 ) 。 因此有:
华
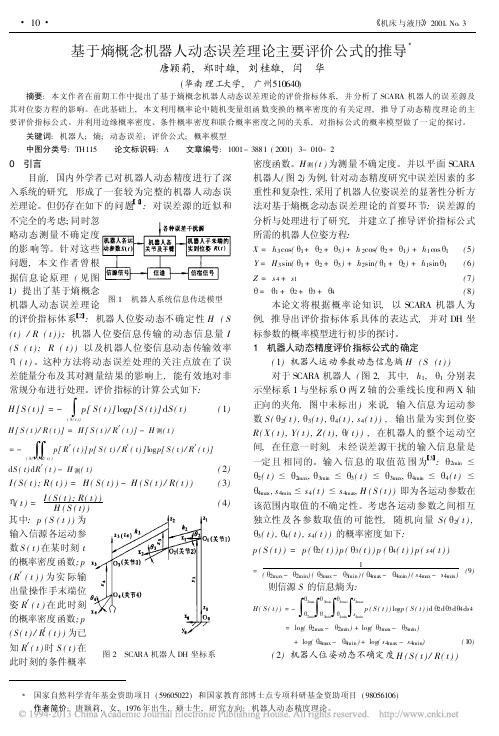
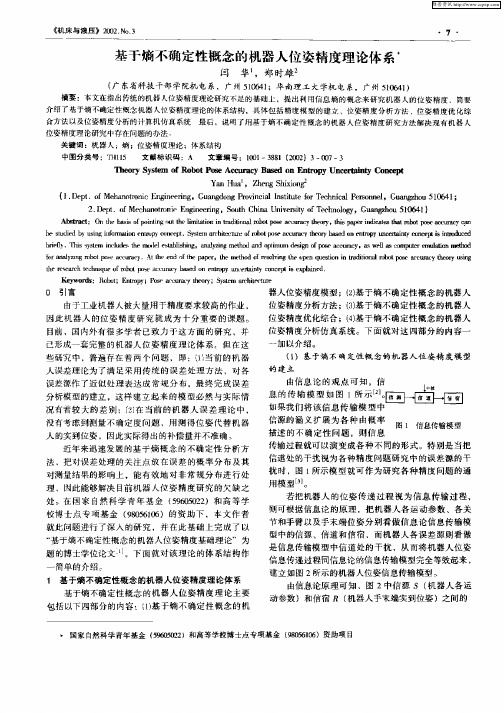
0 引言 目前, 国内外学者已对机器人动态精度进行了深 入系统的研究, 形成了一套较为完整的机器人动态误 差理论。但仍存在如下的问题 1 : 对误差源的近似和 不完全的考虑; 同时忽 略动态测量不确定度 的影 响等。针对这些 问题 , 本文 作者曾根 据信息论原理 ( 见图 1) 提出了基于熵概念 图 1 机器人系统信息传送模型 机器人动态误差理论 的评价指标体系 2 : 机器人位姿动态不确定性 H ( S ( t ) / R ( t ) ) ; 机器人位姿信息传输的动态信息量 I ( S ( t ) ; R ( t ) ) 以及机器人位姿信息动态传输效率 ( t ) 。这种方法将动态误差处理的关注点放在了误 差能量分布及其对测量结果的影响上 , 能有效地对非 常规分布进行处理。评价指标的计算公式如下: H [ S ( t) ] = ( S( t ))
10
机床 与液压 2001 No 3
基于熵概念机器人动态误差理论主要评价公式的推导
唐颖莉, 郑时雄, 刘桂雄, 闫
( 华南理工大学, 广州 510640)
工业机器人运动学标定及误差分析(精)
工业机器人运动学标定及误差分析运动学标定是机器人离线编程技术实用化的关键技术之一,也是机器人学的重要内容,在机器人产业化的背景下有十分重要的理论和现实意义。
机器人运动学标定以运动学建模为基础,几何误差参数辨识为目的,为机器人的误差补偿提供依据。
工业机器人在以示教方式工作时,以重复精度为主要指标;在以离线编程方式工作时,主要工作指标变为绝对精度。
但是,工业机器人重复精度较高而绝对精度较低,难以满足离线编程工作时的精度,所以需要进行运动学标定来提高其绝对精度。
随着机器人离线编程系统的发展,工业机器人运动学标定日益重要。
本文首先综合分析了工业机器人运动学标定的一些基本理论,为之后的运动学建模和标定提供理论基础。
根据ABB IRB140机器人实际结构,本文建立了D-H运动学模型,并讨论了机器人的正运动学问题和逆运动学问题的解;然后指出了该模型在标定中存在的缺陷,结合一种修正后的D-H模型建立了本文用于标定的模型。
并根据最终建立的运动学模型建立了机器人几何误差模型。
本文还在应用代数法求解机器人逆运动学问题的基础上,进行了应用径向基神经网络求解机器人逆解的研究。
该方法结合机器人正运动学模型,以机器人正解为训练样本训练经遗传算法优化后的径向基神经网络(GA-RBF网络),实现从机器人工作变量空间到关节变量空间的非线性映射,从而避免复杂的公式推导和计算。
本文在讨论了两种构造机器人封闭运动链进行运动学标定的方法的基础上,提出了一种新的机器人运动学标定方法——虚拟封闭运动链标定法。
并对该方法的原理、系统构成进行了详细的分析和说明。
该方法通过一道激光束将末端位置误差放大在观测平板上,能够获得更高精度的关节角的值,从而辨识出更为准确的几何参数。
为了验证本文提出的虚拟封闭运动链标定方法的有效性和稳定性,本文以ABB IRB140机器人为研究对象,利用有关数据进行了仿真分析,最终进行了标定试验,得出结论。
同主题文章[1].王金友. 中国工业机器人还有机会吗?' [J]. 机器人技术与应用. 2005.(02)[2].李如松. 工业机器人的应用现状与展望' [J]. 组合机床与自动化加工技术. 1994.(04)[3].赖维德. 工业机器人知识讲座——第一讲什么是工业机器人' [J].机械工人.冷加工. 1995.(02)[4].世界工业机器人产业发展动向' [J]. 今日科技. 2001.(11)[5].人丁兴旺的机器人大家族' [J]. 网络科技时代(数字冲浪). 2002.(01)[6].余力. 工业机器人在西班牙的应用' [J]. 管理科学文摘. 1994.(05)[7].曹祥康. 关于工业机器人产业化问题的思考' [J]. 机器人技术与应用. 2000.(01)[8].李瑞峰. 新一代工业机器人系列产品开发' [J]. 机器人. 2001.(S1)[9].王永林. 工业机器人技术概述与前瞻' [J]. 兵工自动化. 2004.(04)[10].刘远江. 中国工业机器人市场调查' [J]. 机器人技术与应用.2005.(02)【关键词相关文档搜索】:机械制造及其自动化; 工业机器人; 运动学标定; 绝对精度; 误差分析; GA-RBF网络; 虚拟封闭运动链【作者相关信息搜索】:上海交通大学;机械制造及其自动化;杨建国;夏天;。
基于熵不确定性概念的机器人位姿精度理论体系
0 引言 由于工业 机器人被 大量用于精度要 求较 高 的作业 , 因此 机 器人 的位 姿精 度 研 究 就成 为 十 分重 要 的课 题 。 目前 ,国 内外有很 多学者 已致 力 于 这方 面 的研究 ,并 已形成 一套完整 的机器人 位 姿精 度理 论 体系 。但 在这 些研究 中 ,普遍 存在 着两 个 问题 ,即 :( 当前 的 机 器 1 1
.
b t i yui frai n oy ocp. ye r ic r bt oeac ay hoy ae ' n oy ne a t cnetsn d c es d db n bom tnet p net Ss m ac t t eor ops t c er bsd 1etp ea my ocp iir ue ue sg o r c t h eu fo cw t O r u 1 t o d
关键词 :机器人 ;熵 ;位姿精度理论 ;体 系结构 中图分 类号 :]1 1 315 文献 标识谒 :A 文章 编号 :10 —38 2O )3 0 7 0 1 8 1【02 — 0 —3
Un e t i t n e t c ra n y Co c p
T e r y tm fRo o o eAc u a y Ba e n En h o y S se o b tP s c rc s do Y n Hu Z e g Sf in 2 a a , h n txo g i
Ab t a t On te b s f on ig o t h m al i d t n l o o oe a ㈣ sr c : h a i o i t u el k t  ̄ n t i o a b t s c s p n t l o a r i r p
u5 04 ; 16 1
基于熵权系数与TOPSIS集成评价决策方法的研究

基于熵权系数与TOPSIS集成评价决策方法的研究一、本文概述本文旨在探讨和研究基于熵权系数与TOPSIS集成评价决策方法的应用和实践。
该方法作为一种有效的多属性决策分析方法,已经在多个领域得到了广泛的应用。
熵权系数法通过引入信息熵的概念,对评价指标的权重进行客观赋值,从而避免了主观因素的影响。
TOPSIS 法则是一种逼近于理想解的排序方法,通过计算评价对象与理想解和负理想解的距离,进行优劣排序。
将熵权系数法与TOPSIS法相结合,可以充分发挥两者在权重确定和方案排序方面的优势,提高评价决策的科学性和准确性。
本文首先将对熵权系数法和TOPSIS法的基本原理进行介绍,然后详细阐述基于熵权系数与TOPSIS集成评价决策方法的步骤和流程。
接着,本文将通过具体案例,对该方法在实际应用中的效果进行验证和分析。
本文还将探讨该方法在不同领域中的适用性,并分析其优缺点。
本文将对未来研究方向进行展望,以期为相关领域的决策分析和评价提供有益的参考和借鉴。
二、熵权系数法原理及应用熵权系数法是一种基于信息熵理论的决策分析方法,它通过对评价对象各项指标的信息熵进行计算,以确定各指标在评价过程中的权重,进而实现多指标决策问题的定量化分析。
熵权系数法的基本原理和应用如下所述。
熵是热力学中的一个概念,后来在信息论中被引申为衡量信息无序度的量度。
在信息论中,熵越大,表明系统越混乱,携带的信息越少;熵越小,表明系统越有序,携带的信息越多。
借鉴这种思想,可以将熵权系数法应用于多指标决策分析中。
在多指标评价体系中,每个指标都有其特定的取值范围和变化区间,这些指标值的变化反映了评价对象在不同方面的表现。
熵权系数法通过计算各指标的信息熵,来衡量各指标在评价过程中所包含的信息量。
信息熵越小,说明该指标在评价过程中起到的作用越大,因此其权重也应该越大。
熵权系数法在多指标决策问题中具有广泛的应用价值。
它可以用于评价对象的综合性能、比较不同方案之间的优劣、进行风险评估等。
基于熵不确定性概念的机器人位姿精度理论(六)——位姿精度分析的计算机仿真系统
基于熵不确定性概念的机器人位姿精度理论(六)——位姿精度
分析的计算机仿真系统
闫华;郑时雄
【期刊名称】《机床与液压》
【年(卷),期】2002(000)004
【摘要】基于熵不确定性概念的机器人位姿精度评价指标的大小同机器人各参数误差的大小及其概率分布有密切的关系.本文将建立机器人位姿精度分析的计算机仿真系统,利用统计模拟方法,通过改变由机器人机构误差源误差引起的各参数的大小及概率分布,考察评价指标的相应变化,找出影响评价指标的因素.
【总页数】4页(P28-31)
【作者】闫华;郑时雄
【作者单位】广东省科技干部学院机电系,广州,510641;华南理工大学机电系,广州,510641;广东省科技干部学院机电系,广州,510641;华南理工大学机电系,广州,510641
【正文语种】中文
【中图分类】TH115
【相关文献】
1.基于熵不确定性概念的机器人位姿精度理论(5) --评价指标的计算机数值计算方法 [J], 闫华;郑时雄
2.基于熵不确定性概念的机器人位姿精度理论(一)——评价指标体系的建立 [J],
阎华;刘桂雄;郑时雄
3.基于熵不确定性概念的机器人位姿精度理论体系 [J], 闫华;郑时雄
4.基于熵不确定性概念的机器人位姿精度理论(Ⅲ)--机器人DH参数误差概率分布数学模型 [J], 闫华;刘桂雄;郑时雄
5.基于熵不确定性概念的机器人位姿精度理论(Ⅳ)——测量不确定性H_m 的计算(英文) [J], 刘桂雄;闫华;郑时雄
因版权原因,仅展示原文概要,查看原文内容请购买。
云模型
多分辨率分析逆向云发生器X条件云发生器云模型模糊性聚类诊断云模型模糊性轮式机器人单片机泛概念树兴趣层自治域云模型电压耐受曲线模糊性激光扫描Dijkstra算法能量函数最小化BP神经网络网络安全分类算法定性概念正态云模型峰度图像分割信任声誉分类增量学习数值优化空气质量预报云模型云模型综合评价知识共享知识评价云模型云发生器云发生器不确定性阈值生成算法免疫优化算法量子免疫算法环境适应性模型可靠性云模型灰色关联度法信息融合神经网络状态评估学习质量评价教学质量评估相似性分段聚合近似云模型自适应定点直流电机逼近性推理法向量度量公式量子遗传算法函数优化数据场云模型PID交通信号自适应控制正态分布云模型云模型控制器DDE逆云模型移动最小二乘法正态分布期望曲线科技奖励云滴数字特征不确定性规则发生器轮式机器人单片机绩效结构熵权法稳健性云模型不确定性定性概念用户信用评价承包商选择评价方法云模型交通流预测交通优化云模型模糊控制信息融合不确定性鲁棒性评估边界曲线孔洞检测噪声鲁棒云分布云混合模型水质变化趋势分析宁海县云模型云变换云模型区间数满意度云相似度云模型P2P技术智能优化算法云模型云模型遥感影像熵权法云模型云模型免疫危险理论云核多阈值图像分割客户价值客户聚类自适应初始化语言值转换拓展云动态仿真云模型云模型Mann-Kendall检验A3000系统液位搬运机器人ARM云模型评价月销售量预测聚类云模型云c-均值聚类定性贝叶斯批调度自适应参数调整MPU方法布尔操作拥塞度云模型效能评估度量滑模控制平行单级双倒立摆综述威胁识别关联度分析隶属云正态云不确定性复杂系统信任决策信任变化数字水印版权保护实物期权预期现金流收益云模型暂态稳定数据挖掘交通流量数据不确定性云模型综合决策综合云效能评估裕度抢占阈值云模型关联分析云模型规则约简运营成本蒙特卡罗随机数云模型综合评判相似云度量主观信任信任云物料需求计划聚类分析振动参数云模型正态云正态云模型网络安全云模型数字参考咨询服务质量符号化统计特征矢量云模型状态评估项目相似性云发生器模糊性多属性评价军事信息网络定量转化有限状态机状态评估统计分析云模型映射定性评价指标合作伙伴云模型模糊性云模型综合评价云模型增加采样曲率自适应蚁群算法相似因子数据填充云模型矢量神经网络云模型谱聚类效能评估雷达模拟器指标权重作战方案优选云模型土遗址前件云发生器Q-学习信任评估云模型元胞自动机多信息融合云模型蠕滑QoC指标体系云模型云模型云变换效能评估灰云内部威胁感知遗传算法仿真动态模型相似度云模型产业转型战略风险预警空气质量环境评价变权综合评价云模型东江流域图像水印版权保护模糊综合评价电力市场云模型正态云知识本体数字特征隶属度指标体系改进的层次分析法能量价格上限容量价格云发生器高等院校预测云模型智能控制球棒系统云模型关联分析数据离散化概念跃升云模型灰关联驾驶状态二维云定性推理多媒体结构安全决策表云模型数据挖掘隶属度层次分析法线性加权云模型熵权雨模拟三维显示坐标变换非线性系统控制梯度下降法水质评价水体联盟评价云模型正向正态云模型云模型ET0云模型威胁影响因子权重系数特征选择入侵检测资源型城市土地适用性评价指标体系航迹关联信任云综合评判云模型数字特征小波分析云模型增量学习云模型云模型软件过程绩效隶属度模糊概念风险等级信任云理论研究综述评估词汇量云选取判优云模型刀库抛掷爆破综合评价层次分析法保障评价云模型遥感影像客户细分系统设计衰减因子相似度供应链正态云模型AHP云模型信息融合量子计算函数优化承接优势云模型企业管理匹配修复交通状态评价故障模式危害性分析质量评价数字海图质量评估云模型模糊数学云模型入侵检测检测率借阅偏好不确定性图书推荐动态均衡蓄积量Yamaguchi四分量分解遗传算法攻击区云模型云发生器预测云云模型不确定性推理层次分析法熵值法雾化因子误差分析视点特征直方图激光测距仪(LRF)人工免疫原理数据概要结构入侵检测逆向云生成评估模型云模型混合量子计算函数优化云模型幂律数字特征可靠性差异演化粒子群模型正态模糊事故树云模型正态分布云模型云模型云权重逆向云发生器红外图像弱小目标检测评分聚类属性聚类双重置乱置乱程度实数编码全局优化云模型支持向量机信任管理模糊理论云模型TOPSIS方法多因素综合评价模型内蒙古迁移相似度云模型不确定性控制蚁群算法服务选择REST架构云模型正态云评价逆向云发生器峰值法云变换云模型预警私有云负载均衡云模型网络仿真可编程控制器随机数物流服务质量大坝变形数据分析词汇化结构预测评价SWRL故障预测指标土地集约利用综合云词汇化结构预测数据包络分析云模型不完全可信性应力-强度干涉模型CIMS环境云神经网络效能评估评价云模型短时交通流预测模型不确定性推理滑模控制云模型岷江流域指标因素分析法协方差矩阵投影情境建模路径规划自适应参数调整云模型Pareto最优解云模型蒙特卡罗方法自主性评价方法云模型云模型故障诊断灰云NSGA-Ⅱ算法函数优化云模型Web服务虚拟角色模糊性粒子群优化适应度测评方法雷达图函数优化不确定性变量半定量效能评估云模型灵敏度分析云模型不确定性云模型遗传算法云模型多属性评价神经网络综合素质评价彩色图像分割云变换运作管理雷达辐射源信号识别云模型肥尾云模型坡面水毁云模型度量方法条件约束云雾化风险预测动态数据交换液位搬运机器人ARM逆向云发生器定性评价协同过滤项目相似性覆盖算法云模型以约束为中心云模型云模型维护策略评价一致性评价可信度评估效能评估LabVIEW网格任务调度项目的评分相似度时间修正证据理论发散型研讨度量一致性储能系统功率平滑云模型进化算法物元理论评教指标量化健康状态评估偏航控制风电机组探究图像云模型VIKOR方法励磁推理器多机无穷大云模型流媒体业务不确定性四叉树不确定性确定度云模型云运算评估模型店铺选址研究文化评价云模型公交电子站牌灰云聚类变权理论极大似然法飞行器辨识粗糙直方图HSV MapReduce子树同构CIELab彩色空间网格点情感分类云模型云推理确定度映射LabVIEW云模型确定度云理论灰色关联度云模型阿克苏地区云模型层次分析法云模型业绩评价云模型地表水源地不确定性推理风险评价碍航性综合评价D-S证据理论辐射源识别入侵容忍入侵识别有效传输距离评价指标边界曲线孔洞检测并行蚁群算法支持向量机风险评价定性推理板形控制云模型模糊综合评判法云模型Theil指数不确定性托肯入侵检测词袋模型不确定性概念表示云模型云模型云模型有偏好熵权电压分区中枢母线胀缩性云模型聚类查询扩展复合图书馆实体馆藏云模型控制器灾害预警云模型改进非支配排序双语教学应用图像阈值化白细胞核提取分布式传感器融合用户特征属性相似性打分偏好灰色预测模型信任向量混沌优化供应商选择AHP云重心效能评估云模型驾驶状态无线传感器网络状态估计平均无故障时间故障树分析法异常检测异常阈值云模型安全评价云相似度反精确分析灰色理论文本云相似度文本特征提取云模型文摘单元选取灾害损失评估模糊综合评价二维云模型聚类分析简化点云模型云模型情境建模CIMS推理映射评价指标体系云模型评价方法云模型项目分类云模型云理论不确定性法向计算最小二乘拟合供应链绩效评价监测系统数据采集云模型控制器ARM指标体系云模型理论云模型数据认证融合最近迭代点云模型信任二维正态云发生器反馈机制进化策略正态云不确定性推理云模型混沌理论关系数据库数值优化软硬件划分水质评价小波分析云模型信息安全风险评估检修策略云模型移动AdHoc网络评价云模型云模型实例分析视距云变换云模型指数平滑法云模型学习效果评价嵌入式SOPC系统云模型控制器数据挖掘可信推荐节点信誉模型离散微粒群批调度励磁控制汽门控制推理映射非线性映射云发生器工期-费用模型云模型计算机模拟模糊推理系统不确定性正态云云模型无线传感器网络云模型理论权重几何属性光顺去噪云变换多维关联规则轮式机器人单片机不确定语言群体一致性指标体系效能评估隶属云LQR控制串并联系统加权云状态评估故障诊断协同过滤云模型K近邻二向八叉树增量三角网格化离散小波变换数字水印REST架构云模型多属性评价决策方法人工智能云模型云发生器信任度评估声誉信任分类器癌症相关基因云模型驾驶员反应时间汽车运行工况文本分类文本聚类云模型概念客户特征知识发现云模型对称性检测模型表面分割粒化粒层次结构云模型地表水源地云模型模糊隶属函数TSP定性推理板形控制无线传感器网络状态估计PM2.5Favour排序云模型云生成器信息粒概念抽取云模型SAR评估评估AHP正态分布熵正态云云模型评价指标体系路径规划自适应参数调整水印容量云模型环域分割聚类分析云控制器不确定性聚类云模型数据融合云模型展延云模型不确定性推理评价准则异常检测异常阈值云模型映射器不确定性推理正态云熵相似度云模型效能评估云模型区域生长图像分割电磁频谱保障能力QoS参数归约调度算法定性控制二维云模型云模型要点评价去噪特征保持认知科学概念空间模型形式化云模型理论任务调度案例推理路径规划机器人特征增强谷云遗传算法公共交通蚁群优化点云特征点预测模型云模型协方差矩阵配准误差态势预测预测规则时间集中性可信度云人工鱼群算法函数优化云模型隐马尔科夫模型工程造价定性定量古建筑智能控制云理论定性推理云控制器云层次分割二维云变换分割云模型功耗约束逆云模型逆云隶属度语言评价云模型云模型效能评估多蚁群算法路由优化驾驶行为不确定性网络课程评价模型分割区域生长熵权评价最速下降法板形不确定性分析云模型心电信号ST段基于信任网络推荐冷启动推荐云模型数据场量子云旋转门量子云变异与云纠缠点聚类自适应迭代实物期权定价鉴评模糊神经网络反导作战通道多车道智能控制证据距离指标体系模型节点部署传感器模糊C均值(FCM)聚类图像增强最近的N个离散点平衡二叉树效果评估能力云图像阈值化图像分割云发生器LabVIEW变异操作云模型供水管网抗震功能指标体系云模型参数化方法几何图正态云模型区间数逆向云发生器贝叶斯分类小波变异克隆选择算法植被散射水云模型特征辐射源信息平台目标识别云变换RBF神经网络云遗传算法云模型云模型质量综合评价最小生成树K邻域逆向云变换认知计算霍夫曼树逆云模型云模型图像分割证据距离评价遗传算法云模型隶属云模型隶属云定性规则故障树蒙特卡洛云模型行为评判模型复杂网络环境各向异性图像去噪可视化云核图像分割直觉正态云模型建设项目经济评价D-S理论评价安全评价熵图像分割对数量化量化索引调制(QIM)云模型贝叶斯网络云模型服务能力多维信任云不确定因子云模型可拓学云模型数据场云模型权衡函数主观性云模型云模型模糊性多维信任云直接信任云云模型差量云模型保性能容错控制剖面图工业设备云模型粗集录井关键参数生物量水稻投篮命中率投篮角度数字水印鲁棒性效能云模型云模型危险信号最小二乘支持向量机温度补偿数据挖掘安全评价云模型运行情况监测状态检修云模型物元理论故障诊断目标识别姿态估计云模型矿井涌水量情报效能效能评估云模型云模型物元理论云模型matlab仿真警务信息处理云模型环境条件指挥控制效能云模型云重心评估法作战能力二维云规则层次分析云重心评判法云模型微粒群算法信任认知安全监控N维云模型特征速度熵权评价云模型一维正态云全局优化群体智能云模型风险评价云模型熵权云模型动力学互关因子指数法模型简化路径规划机器人故障诊断水轮机组Wiener模型系统辨识云模型变异策略隶属度判定算法点云融合三维重建云模型典型小概率法云模型自适应遗传算法云模型网络入侵云模型路径跟踪个性化推荐云模型云模型神经网络短时频率估计特征提取折线生长恶意节点信任模型变异信任决策评价方法云模型云模型理想方案ANP云模型正向云算法逆向云算法云模型层次分析法云模型比例积分微分粒聚类分析机器鱼云模型火电机组免疫克隆算法云模型不确定推理云化计算性谱聚类Laplacian矩阵云模型QoS/QoE综合评价电子电气员不确定性语义Web云模型隶属度云重心评判法目标可满足性推理云模型空域质量评估质量变化云遗传算法配煤调度遗传算法云模型路网级配数据处理三角网格用户相似性云模型LK算法旅行商问题帧缓冲深度裁剪自适应算法参数优化虚拟人摇头动作控制扩展云云发生器特征点检测k近邻物流节点物流配送槽多属性决策不确定性相似性可信模型信息可信评价规则发生器数据融合计算机模拟蚁群聚类算法标准BP算法神经网络云模型建模与仿真步进电机数字水印fact cell path query parallel协同过滤算法零水印版权保护不确定性控制云模型种群适应度函数优化函数优化迭代最近点算法加权轮式机器人单片机正态云发生器特征选择入侵检测云相似性算法区间私有云虚拟化云自适应遗传BP算法神经网络马赛克算法概念格云模型亲疏系数云模型层次分析法炮兵营线性回归模型云模型代理体系结构调度算法云理论模糊模式识别模糊理论云计算鲁棒性云模型云分类器交叉验证EM算法重建算法蚁群遗传算法正态云模型点云模型位移细分曲面旅行商问题模型识别改进云模型变异收敛性二维正态云拟合云云模型云物元分析原理数据融合动态定价生鲜食品数字线划图云模型人工免疫模型云模型自学习进化算法个体能动性云模型改进蚁群算法云计算网格FY-2C云图关联规则云模型经济车速规划条件云模糊理论云模型物元理论Fréchet距离自适应C-measure算法路由问题多目标路由问题云模型压缩感知方向场阴影线影响范围网格计算任务调度数据包络分析主成分分析数据场搜寻区域变权理论云模型特征提取点云简化云模型电网企业云模型组合评价云模型定性规则类别相似性综合相似性遗传算法云模型LSF调度算法抢占阈值联机分析处理云模型可信评价构件疲劳人耳分割3D姿态归一化业主招投标数据融合云模型并行技术农田采集优先变量模糊神经网络模糊性随机性粗糙-云模型矿山变压器意图识别模糊控制法向估算上采样高度差K-邻近点信任模型集对分析风险评估多属性评价粒子群算法支持向量回归机内脏脂肪面积健康评价过程改进CMNI主观Bayes方法云模型故障诊断熵理论人工智能技术遗传算法测点选择故障字典刀轨修改刀轨生成评价模型熵权法云模型熵权法人力资源管理外包风险安全评价云模型Clifford-Fourier变换3D点云径向基函数神经网络故障诊断云模型信任向量云理论云重心评价法模糊信息设计方案云模型故障停电云综合p阶逆向云变换分形矩阵风险评估科技奖励评价评价非一致性云模型评价指标体系综合指数评价云模型综合评估大数据云计算云推理云模型权重云推理知识共享服务质量最大最小贴近度算术平均最小贴近度Bootstrap方法雷达辐射源信号信用卡信用评价云模型改善云模型RBF神经网络线性四叉树多分辨率模型软测量云模型云模型QNN云模型RT-LAB发动机运行云模型云理论风险评估云模型指数平滑法云模型评价体系认知无线网络参数优化数字水印K近邻丢包队长信任等级定量评估概念提升定性评价云重心评估移动最小二乘法点云模型独立成分分析云模型云模型变权理论云理论效能评估年龄分布评价不确定性点云模型分水岭轮廓算法损益云模型损益比云模型惯性权重正态云模型正向正态云发生器云模型风险评估体系框架云模型工程项目质量成本预测信任模型云模型粒粒编码方式数学模型航迹控制Ad Hoc网络移动意图检测前跟踪动态规划差分进化合作式协同进化支持向量机增量学习云模型神经网络位置估计云模型指标气象相似性点云配准融合神经网络粒子群语义描述三维模型库态势提取态势感知评价云模型云模型层次分析法项目的评分相似度时间修正云模型蚁群算法参数辨识PID控制指标体系云模型评价指标云模型概念数字特征概念跃升云模型特征项线性四叉树多分辨率模型云模型确定度红外图像弱小目标检测并行蚁群算法支持向量机移动最小二乘法点云模型云理论效能评估电压分区中枢母线关联关系无监督学习云模型D-S证据合成云模型D-S证据合成云模型云重心富营养化评价水环境粒子群优化模糊逻辑粒子群优化模糊逻辑评价不确定性质量评价云模型信任传递数字特征判定矩阵对称性检测PCA分析均匀云云综合变形基函数高斯分布云模型云重心灰度服务质量绩效评价特征提取线性相关性粒子群优化模糊逻辑层次分析法模糊计算测点识别人体尺寸数字特征判定矩阵对称性检测PCA分析特征提取二叉树云计算网格蚁群算法推荐技术兴趣发现智能群体算法盘式绝缘子云模型最优判别差分进化算法云模型二元语义云模型孔洞边界点可编程控制器变频器云模型绩效评价云模型功耗约束点云简化点云分割BP网络板形预测三维重建图像改进的云神经网络T-S云推理网络透明加密双缓存价值评估模型云模型层次分析法云模型演化建模趋势预测云模型图像分割云化概念遗传算法粒子群算法综合评价云模型互动发展发展策略乘客行为云模型评价指标体系云模型灰色预估模糊控制QoS/QoE相似性度量云变换相似性度量层次聚类云模型评价体系云模型遗传算法故障诊断危险理论移动Ad Hoc网络云模型云模型可信路由概念扩展查询词权重综合评价云模型小波变换关联规则云模型等距对合谱分析主观信任模型风险评估多目标化记忆策略多样化搜索集中化搜索人件服务软件服务边缘对偶帧差法图割检测感知多边形网格实时绘制时间资源分配网络特征曲率光顺案例推理云模型可信性一体化校核与验证过程事故模式云模型云模型推理机制径向基神经网络核密度估计主观信任云模型云模型核主分量分析重构运行机制合作机制影响机制云模型云模型离群释义子空间云模型区间直觉模糊理论数字航空摄影质量元素特征选择不平衡文本云模型云安全架构区域生长图像分割信任云行为预测合作博弈云模型电力大客户运营环境信任卫星系统设计设计优化遗传算法云模型云理论泛概念树兴趣群组信任模型云计算图形处理器云模型矢量云故障诊断云模型蒙特卡洛仿真最优概率粒子群算法差分进化绩效结构云模型云模型组合预测RS特征抽取遗传算法风力机模糊推理点云模型体积计算预期现金流收益B-S公式煤与瓦斯预测云发生器本体知识服务质量评价云模型发展审计信息化审计评价模糊神经网络交通信号控制策略切片法矢量轨迹获取逆向工程多媒体信息检索时空相关性粒子群优化主成分分析植物形态重建特征匹配SFM算法EM算法证据理论贝叶斯概率推理网可视化意见综合山茶属植物数值分类人工髓核生物力学模拟计算点云切片用户评分可信度用户推荐可信度吸积盘太阳星云二维图像旋转轴网格模型体素模型指标体系评标模型。
比例减压阀数学模型辨识_尹妍萍
ωT 2
+jsin
ω2T]
N-1
N-1
P(jω)=ΔTn=0P (n ΔT)co s(ωn ΔT)-jn=0P (n ΔT)sin(ωn ΔT)
=Re(ω)+jIm(ω)
N 为采样点数 , ΔT 为采样周期 。
考虑比例减压阀的数学模型为如下型式 :
G
*(s)=
UP( (ss))=B
1
A0 +A1 s2 +B2 s
【2】 吴根茂·实用电液比例技术·浙江大学出版社 , 1993
收稿时间 :2000 -08 -10
(上接第 11 页)
性变形误差 , 且相互关联 。假设由间隙误差和构件弹
性变形引起的的 h3 的误差分别为 Δh3j 和 Δh3t , 则 h3 总的误差为 :
Δh3 =Δh3j +Δh 3t
(17)
根据概率论原理【5】, 参数 h3 误差 Δh3 的概率密度
ec
=K
1 +1i
k
=1
1
-DDmm-(1(ωωi)i)
m 为迭代次数 , 误差 ec ≤0.05 次迭代终止
实验时 选取 的方 波
脉 冲 A =2.0V , T =
0.02s , 压 力 传 感 器 放
大系数为 Kp =2.1MPa/
V , 测得的响应曲线如
图3 所示。
计算频率 特性 时 ,
ΔT =0.02s , N =60 。
s +1
其中 :A0 , A1 , B1 , B2为待辨识的模型参数 , 则理论
频率特性为 :
G
*(j ω)=(1
A0 +jA1 ω -B1 ω2)+jB2
熵值法的原理及实例讲解
熵值法1.算法简介熵值法是一种客观赋权法,其根据各项指标观测值所提供的信息的大小来确定指标权重。
设有m 个待评方案,n 项评价指标,形成原始指标数据矩阵n m ij x X ⨯=)(,对于某项指标j x ,指标值ij X 的差距越大,则该指标在综合评价中所起的作用越大;如果某项指标的指标值全部相等,则该指标在综合评价中不起作用。
在信息论中,熵是对不确定性的一种度量。
信息量越大,不确定性就越小,熵也就越小;信息量越小,不确定性就越大,熵也越大.根据熵的特性,我们可以通过计算熵值来判断一个方案的随机性及无序程度,也可以用熵值来判断某个指标的离散程度,指标的离散程度越大,该指标对综合评价的影响越大!因此,可根据各项指标的变异程度,利用信息熵这个工具,计算出各个指标的权重,为多指标综合评价提供依据!2.算法实现过程2.1 数据矩阵mn nm n m X X X X A ⨯⎪⎪⎪⎭⎫ ⎝⎛=1111其中ij X 为第i 个方案第j 个指标的数值 2.2 数据的非负数化处理由于熵值法计算采用的是各个方案某一指标占同一指标值总和的比值,因此不存在量纲的影响,不需要进行标准化处理,若数据中有负数,就需要对数据进行非负化处理!此外,为了避免求熵值时对数的无意义,需要进行数据平移:对于越大越好的指标:m j n i X X X X X X X X X X X nj j j nj j j nj j j ij ij ,,2,1;,,2,1,1),,,min(),,,max(),,,min(212121' ==+--=对于越小越好的指标:m j n i X X X X X X X X X X X nj j j nj j j ijnj j j ij ,,2,1;,,2,1,1),,,min(),,,max(),,,max(212121' ==+--=为了方便起见,仍记非负化处理后的数据为ij X2.3 计算第j 项指标下第i 个方案占该指标的比重),2,1(1m j XX P n i ijij ij ==∑= 2.4 计算第j 项指标的熵值1e 0,ln 10ln ,0,)log(*1≤≤=≥>-=∑=则一般令有关,与样本数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
t) ) p(
3( t ) ) p
(
4(
t ) ) p ( s 4( t ) )
( 9)
1
2min) ( 3max 3 min ) ( 4max 4min ) ( s 4max - s 4min )
则信源 S 的信息熵为:
2ma x 3 ma x 4max
s4max s4min
1+ 2+ 3+ 4=
m1 + m2 + m3 + m4
因此: pm ( m 1 , m 2 ,
, m 8) , m 8 ) ] | J | ( 13)
= p R [ R 1 ( m 1, , m 8 ) , , R 8( m 1, 其中: | J | 为雅各比行列式。 dR 1 d m1 | J |= dR 1 d m2 dR 2 d m1 dR 2 d m2 dR8 dm 1 dR8 dm 2 dR8 dm 8
S( 2( t), 3( t ), 4( t) , S4( t ))
p (S( t)/ R (t ) logp (S( t)/ R ( t ) dS ( 16)
m6sin( m1 + m2 + m3) - m7cos(m 1+ m2 + m3)- h2sinm3) sin( m2 + m 3)
再对所有的 R 求积分有: H ( S ( t) | R ( t) ) =R (x ( t ), y ( t ), z (t ), ( t ))
华
0 引言 目前, 国内外学者已对机器人动态精度进行了深 入系统的研究, 形成了一套较为完整的机器人动态误 差理论。但仍存在如下的问题 1 : 对误差源的近似和 不完全的考虑; 同时忽 略动态测量不确定度 的影 响等。针对这些 问题 , 本文 作者曾根 据信息论原理 ( 见图 1) 提出了基于熵概念 图 1 机器人系统信息传送模型 机器人动态误差理论 的评价指标体系 2 : 机器人位姿动态不确定性 H ( S ( t ) / R ( t ) ) ; 机器人位姿信息传输的动态信息量 I ( S ( t ) ; R ( t ) ) 以及机器人位姿信息动态传输效率 ( t ) 。这种方法将动态误差处理的关注点放在了误 差能量分布及其对测量结果的影响上 , 能有效地对非 常规分布进行处理。评价指标的计算公式如下: H [ S ( t) ] = ( S( t ))
X = h 3 cos( Y = H 3 sin( Z = s 4 + s1 =
1+ 2+ 3+ 4 1+ 1+ 2+ 2+ 3) + 3)
h 2cos(
2+ 1+
1) 2)
+ h 1 cos + h 1sin
1 1
( 5) ( 6) ( 7) ( 8)
+ h 2sin (
本论文将根据概率论知识, 以 SCARA 机器人为 例, 推导出评价指标体系具体的表达式, 并对 DH 坐 标参数的概率模型进行初步的探讨。 1 机器人动态精度评价指标公式的确定 ( 1) 机器人运动参数动态信息熵 H ( S ( t ) ) 对于 SCARA 机器人 ( 图 2, 其中, h1 , 1 分别表 示坐标系 1 与坐标系 O 两 Z 轴的公垂线长度和两 X 轴 正向的夹角, 图中未标出 ) 来说, 输入信息为运动参 数 S( 2( t ) , 3 ( t ) , 4 ( t ) , s 4 ( t ) ) , 输出量为实到位姿 R( X ( t ) , Y( t ) , Z( t) , ( t ) ) , 在机器人的整个运动空 间, 在任意一时刻, 未经误差源干扰的输入信息量是 一定且 相同的。输入 信息的 取值范 围为 3 : 2( t ) 2 max, 3min 3( t ) 3max, 4min
d S ( t) d R ( t ) - H t ) ) = H ( S( t ) ) - H ( S( t ) / R( t ) ) ( t ) = I ( S( t ) ; R( t ) ) H ( S ( t) ) 其中: p ( S ( t ) ) 为 输入信源各运动参 数 S ( t ) 在某时刻 t 的概率密度函数 ; p ( R ( t ) ) 为实 际输 出量操作手末端位 姿 R ( t ) 在此时刻 的概率密度函数 ; p ( S( t ) / R ( t ) ) 为已 知 R ( t) 时 S ( t) 在 此时刻的条件概率
图 2 SCARA 机器人 DH 坐标系
( 2) ( 3) ( 4)
s4( t )
s 4max, H ( S ( t ) ) 即为各运动参数在
该范围内取值的不确定性。考虑各运动参数之间相互 独立性及各参数取值的可能性, 随机向量 S( 2( t ) , 3 ( t ) , 4 ( t ) , s 4( t ) ) 的概率密度如下: p( S ( t) ) = p(
10
机床 与液压 2001 No 3
基于熵概念机器人动态误差理论主要评价公式的推导
唐颖莉, 郑时雄, 刘桂雄, 闫
( 华南理工大学, 广州 510640)
摘要 : 本文作者在前期工作中提出了基于熵概念机器人动态误差理论的评价指标体系 , 并 分析了 SCARA 机器人的误 差源及 其对位姿方程的影响。在此基础上 , 本文利用概率论中随机变量组函 数变换的 概率密度的 有关定理 , 推 导了动态精 度理论 的主 要评价指标公式。并利用边缘概率密度、条件概率密度和联合概率密度之间的关系 , 对指标公式的概率模型做了一 定的探讨。 关键词 : 机器人 ; 熵 ; 动态误差 ; 评价公式 ; 概率模型 中图分类号 : TH115 论文标识码 : A 文章编号 : 1001- 3881 ( 2001) 3- 010- 2
H( S ( t) ) = 2min 3 m in 4min
p ( S ( t) ) log p ( S ( t) ) d 2 d 3 d 4 ds 4
3min )
= log( 2max + log( 4max -
2min ) + log( 3max -
4 min ) + log( s 4max - s 4min)
机床与液压
2001 No 3
11
m 8) ] | J | d m 1 d m3 d m8
2
机器人位姿动态不确定度由残留熵 H (S(t )/ R( t)) 来表示, 由式 ( 2) 可知, 要想求 H ( S( t ) / R ( t ) ) , 首 先 要 求 p ( R ( t) ) 、 p( S ( t) | R ( t) ) 和 H测 ( t) 。 p ( R ( t ) ) 和 H 测( t ) 可以根据测得的机器人实到手部 位姿 R 和测量的实际情况求出, 则关键之处在于求 p ( S ( t ) | R ( t ) ) 。为此, 运用概率论中求随机变量组 函数变换的概率密度的有关定理 4 。对于任一时刻, 将位姿公式 ( 5) ~ ( 8) 中的 X , Y, Z, 分别用 X , Y , Z , 代替, 根据前期 工作的分析, 只考虑 d 1 , ds 1 , d h1 , d h 3 对末端位姿的影响, 做如下假设: m1 = m2 = m3 = m4 =
- h2 sin m2 - m6 sin m1 + m 7cos m1 R2 = h3 = sin( m 2 + m 3) R3 =
1
p ( R ( t ) )H t1d R
( 17)
= m1 ( 12)
R 4 = s 1 = m8 - m5 R 5 = x = m6 R 6 = Y = m7 R 7 = z = m8 R8 =
( 10)
( 2) 机器人位姿动态不确定度 H ( S( t ) / R( t ) )
国家自然科学青年基金资助项目 ( 59605022) 和国家教育部博士点专项科研基金资助项目 ( 98056106) 作者简价 : 唐颖莉 , 女 , 1976 年出生 , 硕士生 , 研究方向 : 机器人动 态精度理论。
4max , s 4min 2min 4( t )
p [ S( t ) ] log p [ S ( t ) ] d S( t )
( 1)
H [ S ( t ) / R ( t ) ] = H [ S ( t ) / R ( t ) ] - H 测( t ) =( S( t ), R( t) )
p[ R ( t ) ] p[ S ( t) / R ( t) ] log p[ S ( t ) / R ( t ) ]
密度函数。H 测 ( t ) 为测量不确定度。并以平面 SCARA 机器人( 图 2) 为例, 针对动态精度研究中误差因素的多 重性和复杂性 , 采用了机器人位姿误差的显著性分析方 法对基于熵概念动态误差理论的首要环节: 误差源的 分析与处理进行了研究, 并建立了推导评价指标公式 所需的机器人位姿方程:
p( S( t) = p( 2( t),
3( t) , 4( t), s4( t))
= p 2( 2) p 3( 3) p 4( 4) p 5( s4)
t
t
t
t
= f 1 ( x , y , h 1, h 2, h 3) = f 2 ( x , y , h 1, h 2, h 3) = f 3 ( x , y , h 1, h 2, h 3) = f 4( x , y , , h 1 , h 2 , h3 ) ( 11)
1 2 3 4
于是得到某一 t 时刻输入参数之一 p2 (
t 2)
的概率分布密度:
1, 2, 3, 4,
=
1 3 4
S4 x
y
z
p R [ h1 (