各种最小二乘法汇总(算例及MATLAB程序)
最小二乘法--计算方法
生活中的计算方法应用实例———最小二乘法,用MATLAB实现1. 数值实例下面给定的是某市最近1个月早晨7:00左右(新疆时间)的天气预报所得到的温度天数 1 2 3 4 5 6 7 8 9 10 温度9 10 11 12 13 14 13 12 11 9 天数11 12 13 14 15 16 17 18 19 20 温度10 11 12 13 14 12 11 10 9 8 天数21 22 23 24 25 26 27 28 29 30 温度7 8 9 11 9 7 6 5 3 1下面用MATLAB编程对上述数据进行最小二乘拟合,按照数据找出任意次曲线拟合方程和它的图像。
2、程序代码x=[1:1:30];y=[9,10,11,12,13,14,13,12,11,9,10,11,12,13,14,12,11,10,9,8,7,8,9,11,9,7, 6,5,3,1];a1=polyfit(x,y,3) %三次多项式拟合%a2= polyfit(x,y,9) %九次多项式拟合%a3= polyfit(x,y,15) %十五次多项式拟合%b1= polyval(a1,x)b2= polyval(a2,x)b3= polyval(a3,x)r1= sum((y-b1).^2) %三次多项式误差平方和%r2= sum((y-b2).^2) %九次次多项式误差平方和%r3= sum((y-b3).^2) %十五次多项式误差平方和%plot(x,y,'*') %用*画出x,y图像%hold onplot(x,b1, 'r') %用红色线画出x,b1图像%hold onplot(x,b2, 'g') %用绿色线画出x,b2图像%hold onplot(x,b3, 'b:o') %用蓝色o线画出x,b3图像%3、数值结果不同次数多项式拟合误差平方和为:r1=67.6659r2=20.1060r3=3.7952r1、r2、r3分别表示三次、九次、十五次多项式误差平方和。
最小二乘法matlab程序
最小二乘法(Least Squares Method,LSM)是一种数值计算方法,用于拟合曲线,求解未知参数的值。
它的基本思想是,通过求解最小二乘误差的最优解,来拟合曲线,从而求得未知参数的值。
本文将介绍最小二乘法在Matlab中的实现原理及程序编写。
一、最小二乘法的原理最小二乘法是一种数值计算方法,它的基本思想是,通过求解最小二乘误差的最优解,来拟合曲线,从而求得未知参数的值。
最小二乘法的基本原理是:给定一组数据点,用直线拟合这组数据点,使得拟合直线与这组数据点的误差的平方和最小。
具体地说,假设有一组数据点,其中每个数据点都可表示为(x_i, y_i),i=1,2,3,...,n,其中x_i和y_i分别表示第i个数据点的横纵坐标。
拟合这组数据点的直线通常用一元线性函数表示,即y=ax+b,其中a和b是未知参数。
最小二乘法的思想是:求出使误差的平方和最小的a和b,即求出最优解。
二、Matlab程序编写1. 准备工作首先,我们需要准备一组数据点,每个数据点都可表示为(x_i, y_i),i=1,2,3,...,n,其中x_i和y_i分别表示第i个数据点的横纵坐标。
例如,我们可以准备一组数据点:x=[1,2,3,4,5];y=[2,4,6,8,10];2. 程序编写接下来,我们就可以开始编写Matlab程序了。
首先,我们需要定义一个一元线性函数,用于拟合这组数据点。
函数的形式为:y=ax+b,其中a和b是未知参数。
%定义函数f=@(a,b,x)a*x+b;然后,我们需要定义一个误差函数,用于计算拟合直线与这组数据点的误差的平方和。
%定义误差函数error=@(a,b)sum((y-f(a,b,x)).^2);最后,我们就可以使用Matlab提供的fminsearch函数,求解最小二乘误差的最优解,即求出最优a和b的值。
%求解最优解[a,b]=fminsearch(error,[1,1]);经过上面的程序编写,我们就可以求得未知参数a和b的最优值。
matlab最小二乘法
4. 设某物理量Y与X 满足关系式Y=aX2+bX+c,实验获得一批数据如下表,试辨识模型参数a,b和c 。
(50分)X 1.01 2.03 3.02 4.015 6.027.038.049.0310Y9.6 4.1 1.30.40.050.10.7 1.8 3.89.0单,最后给出结果及分析。
(1) 问题描述:由题意知,这是一个已知模型为Y=aX2+bX+c,给出了10组实验输入输出数据,要求对模型参数a,b,c进行辨识。
这里对该模型参数辨识采用递推最小二乘法。
(2) 参数估计原理对该模型参数辨识采用递推最小二乘法,即RLS(recurisive least square),它是一种能够对模型参数进行在线实时估计的辨识方法。
其基本思想可以概括为:新的估计值=旧的估计值+修正项下面将批处理最小二乘法改写为递推形式即递推最小二乘参数估计的计算方法。
批处理最小二乘估计为,设k时刻的批处理最小二乘估计为:令K时刻的最小二乘估计可以表示为==;式中,因为要推导出P(k)和K(k)的递推方程,因此这里介绍一下矩阵求逆引理:设A、(A+BC)和(I+)均为非奇异方阵,则通过运用矩阵求逆引理,把复杂的矩阵求逆转化为标量求倒数,大大减小了计算量。
与间的递推关系。
最终得到递推最小二乘参数递推估计公式如下:(3)程序流程图 (如右图1所示)递推最小二乘法(RLS)步骤如下:已知:、和d。
Step 1 :设置初值和P(0),输入初始数据;Step2 :采样当前输出y(k)、和输入u(k)Step3 :利用上面式计算、和;Step4 :kk+1,返回step2,继续循环。
图1 程序流程图(4) Matlab仿真程序、输出参数估计值、参数估计变化轨迹图像、结果分析仿真程序如下:X=[1.01 2.03 3.02 4.01 5 6.02 7.03 8.04 9.03 10]; Y=[9.6 4.1 1.3 0.4 0.05 0.1 0.7 1.8 3.8 9.0];%实验输入数据、实验输出数据syms a b c % 定义待辨识参数theta=[a;b;c]; %theta包含待辨识参数a,b,ctheta1=zeros(3,1); %对象参数初始化P=10^6*eye(3) %构造初始P阵for k=1:10 %仿真步长范围1到10phi=[X(k)*X(k);X(k);1];%y=aX*X+bX+c=phi'*theta%theta=[a;b;c];phi=[X(k)*X(k);X(k);1]K=P*phi/(1+phi'*P*phi); %递推最小二乘法K阵的递推公式theta=theta1+K*(Y(k)-phi'*theta1); %theta的递推公式P=(eye(3)-K*phi')*P; %递推最小二乘法P阵的递推公式theta1=theta; %theta的最终估计向量theta2(:,k)=theta; %theta估计向量矩阵化,目的是为了%下面的plot仿真图像输出endtheta1 %输出参数估计值plot([1:10],theta2) %输出参数逐步递推估计的轨迹图像xlabel('k'); %设置横坐标为步长kylabel('参数估计a,b,c'); %纵坐标为估计参数a,b,c legend('a','b','c'); %标示相应曲线对应的参数axis([1 10 -10 20]); %设置坐标轴范围P =1000000 0 00 1000000 00 0 1000000输出参数估计值、参数估计变化轨迹图像:theta1 =0.4575-5.073413.3711图 2 参数估计逐步变化轨迹图像结果分析:通过matlab仿真可知,由递推最小二乘法辨识到的参数为:a=0.4575;b=-5.0734;c=13.3711所以Y=0.4575-5.0734X+13.3711 。
matlab function编程最小二乘法
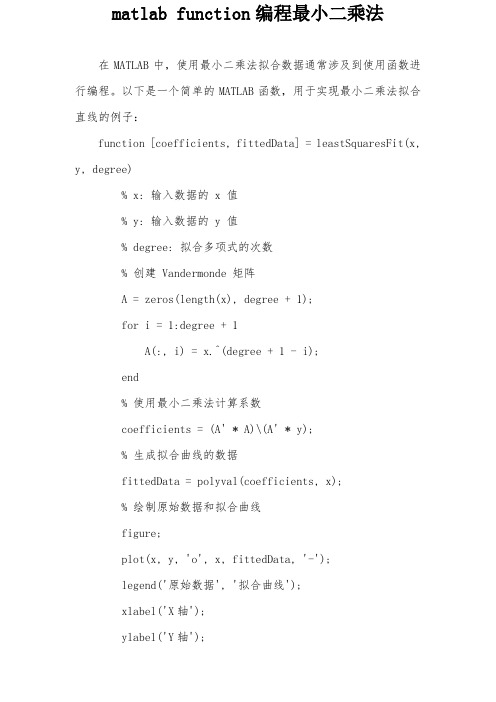
matlab function编程最小二乘法在MATLAB中,使用最小二乘法拟合数据通常涉及到使用函数进行编程。
以下是一个简单的MATLAB函数,用于实现最小二乘法拟合直线的例子:function [coefficients, fittedData] = leastSquaresFit(x, y, degree)% x: 输入数据的 x 值% y: 输入数据的 y 值% degree: 拟合多项式的次数% 创建 Vandermonde 矩阵A = zeros(length(x), degree + 1);for i = 1:degree + 1A(:, i) = x.^(degree + 1 - i);end% 使用最小二乘法计算系数coefficients = (A' * A)\(A' * y);% 生成拟合曲线的数据fittedData = polyval(coefficients, x);% 绘制原始数据和拟合曲线figure;plot(x, y, 'o', x, fittedData, '-');legend('原始数据', '拟合曲线');xlabel('X轴');ylabel('Y轴');title('最小二乘法拟合');end你可以通过调用这个函数并提供你的数据和拟合多项式的次数来进行最小二乘法拟合。
例如:x = [1, 2, 3, 4, 5];y = [2.1, 2.8, 3.4, 3.7, 4.2];degree = 1;[coefficients, fittedData] = leastSquaresFit(x, y, degree);disp('拟合系数:');disp(coefficients);这是一个简单的线性拟合的例子。
你可以根据需要修改该函数,以适应高次多项式的情况。
各种最小二乘法汇总(算例及MATLAB程序)
u(400)
⎟ ⎠
Matlab程序见附录 1。
1.2. 递推最小二乘算法
递推最小二乘算法公式:
^
^
^
θ (k) = θ (k −1) + K (k)[z(k) − h' (k)θ (k −1)]
K (k) = P(k −1)h(k)[h' (k)P(k −1)h(k) + 1 ]−1
(1.2)
Λ(k)
b2 a1 50 100 150 200 250 300 350 400 450
图 1 一般最小二乘参数过渡过程
4
盛晓婷 最小二乘算法总结报告
估计方差变化过程
100
90
80
70
60
50
40
30
20
10
0
0
50 100 150 200 250 300 350 400 450
图 2 一般最小二乘方差变化过程
1.1. 一次计算最小二乘算法
⎛ ⎜
^
a1
⎞ ⎟
⎛ -1.4916 ⎞
^
θ
LS
=
⎜^ ⎜ a2 ⎜^ ⎜ b1
⎟ ⎟ ⎟ ⎟
=
(
H
T L
H
L
)−1
H
T L
Z
L
=
⎜ ⎜
0.7005
⎟ ⎟
⎜1.0364 ⎟
⎜
⎟
(1.1)
⎜⎜⎝
^
b2
⎟⎟⎠
⎝ 0.4268 ⎠
⎛ Z (3) ⎞
⎛ hT (3) ⎞ ⎛ −Z (2) −Z (1)
图 1 一般最小二乘参数过渡过程 .....................................................4 图 2 一般最小二乘方差变化过程 ....................................................5 图 3 遗忘因子法参数过渡过程 ........................................................7 图 4 遗忘因子法方差变化过程 ........................................................8 图 5 限定记忆法参数过渡过程 ......................................................10 图 6 限定记忆法方差变化过程 ......................................................10 图 7 偏差补偿最小二乘参数过渡过程 ..........................................12 图 8 偏差补偿最小二乘方差变化过程 ..........................................12 图 9 增广最小二乘辨识模型 ..........................................................13 图 10 增广最小二乘参数过渡过程 ................................................14 图 11 广义最小二乘参数过渡过程 ................................................16 图 12 广义最小二乘方差变化过程 ................................................16 图 13 辅助变量法参数过渡过程 ....................................................18 图 14 辅助变量法方差变化过程 ....................................................18 图 15 二步法参数过渡过程 ............................................................20 图 16 二步法方差变化过程 ............................................................20
ESPRIT算法(最小二乘法)matlab程序
%基本ESPRIT算法,第二种方法最小二乘法clear all;close all;clc;c=3*10^8;f=3*10^9;%% 求得信号的波长lamda=c/f;%%阵元的间距d=lamda/2;%% (n-1)为子阵列的个数即阵元数n=10;%% 信号的数目signal_number=3;%% 三个信号的角度值thita1=-25;thita2=30;thita3=65;%% 三个信号的中心频率f1=40;f2=20;f3=70;%% 在时域来说,是快拍数(一段时间内对阵列数据采样的个数);在频域来说,是DFT的时间子段的个数。
snapshot=1:2000;%% S是信号空间,有三个信号组成S1=2.72*exp(j*2*pi*f1*snapshot/length(snapshot));S2=4.48*exp(j*2*pi*f2*snapshot/length(snapshot));S3=7.37*exp(j*2*pi*f3*snapshot/length(snapshot));S=[S1;S2;S3];%% 子阵1A1=exp(-j*2*pi*d*[0:n-1]*sin(thita1*pi/180)/lamda).';A2=exp(-j*2*pi*d*[0:n-1]*sin(thita2*pi/180)/lamda).';A3=exp(-j*2*pi*d*[0:n-1]*sin(thita3*pi/180)/lamda).';A=[A1,A2,A3];%% 噪声假设为高斯白噪声,均值为零的N= wgn(10,2000,3);%% 求信噪比的S1,S2,S3信噪比依次是10 20 30s_power1=10*log(2.72^2/2);s_power2=10*log(4.48^2/2);s_power3=10*log(7.37^2/2);snr1=s_power1-3;snr2=s_power2-3;snr3=s_power3-3;%% 整个阵列接收到的数据0-n-1为阵列1;1-n为阵列2的X=A*S+N;%% 协方差矩阵Rxx=X*X'/length(snapshot);%% 对整个数据的协方差矩阵进行特征分解,从而得到特征值向量D和特征向量V[V,D]=eig(Rxx);%[Y,I]=sort(diag(D));Us=V(:,n-signal_number+1:n);%% 两个方阵张成的两个子空间U1=Us(1:n-1,:);U2=Us(2:n,:);%% 利用最小二乘法求得旋转不变关系矩阵,然后进行特征分解[p,q]=eig(inv(U1'*U1)*U1'*U2); %张贤达《矩阵分析与应用》第528页%% 利用上面求得的矩阵来获得角度for i=1:signal_number;alpha(i)=real(asin(-j*(log(q(i,i)))*lamda/(-2*pi*d))*180/pi);end;%% 作图stem(alpha,ones(1,signal_number),'r--');grid;axis([-90 90 0 2]);text(alpha(1)-4,1.1,num2str(alpha(1)));text(alpha(1)-15,1.4,'信号1,信噪比为10'); text(alpha(2)-4,1.1,num2str(alpha(2)));text(alpha(2)-15,1.4,'信号2,信噪比为20'); text(alpha(3)-4,1.1,num2str(alpha(3)));text(alpha(3)-15,1.4,'信号3,信噪比为30'); ylabel('DOA估计的角度值');xlabel('角度');title('ESPRIT算法DOA估计');。
最小二乘法圆拟合及matlab程序

Q(a,b, c)
a
2( X i2 Yi2 aX i bYi c) X i 0
①
Q(a,b, c)
b
2( X i2 Yi2 aX i bYi c)Yi 0 ②
Q(a,b, c)
c
2( X i2 Yi2 aX i bYi c) 0 ③
最小二乘法圆拟合
1
最小二乘法拟合圆曲线: R2 (x A)2 ( y B)2
R2 x2 2Ax A2 y2 2By B2
令a=-2A,b=-2B, c A2 B2 R2
则:圆的另一形式为:
x2 y2 ax by c 0
2
A a 只需求出参数a,b,c即可以求的圆半径参数: 2
A a 2
B b 2
R 1 a2 b2 4c 2
9
t=0:0.01:pi; a=20;%设定圆心X轴数值 b=30;%设定圆心Y轴数值 r=5;%设定圆半径数值 x=a+r*cos(t)+randn(1,315); y=b+r*sin(t)+randn(1,315); plot(x,y); hold on; x=x(:); y=y(:); m=[x y ones(size(x))]\[-(x.^2+y.^2)]; xc = -.5*m(1)%拟合圆心X轴数值 yc = -.5*m(2)%拟合圆心Y轴数值 R = sqrt((m(1)^2+m(2)^2)/4-m(3))%拟合半径数值 plot(xc,yc,'r-x',(xc+R*cos(t)),(yc+R*sin(t)),'r-'); axis equal;
(完整word版)最小二乘法拟合圆公式推导及matlab实现
2009-01-17 |最小二乘法(least squares analysis) 是一种数学优化技术,它通过最小化误差的平方和找到一组数据的最佳函数匹配。
最小二乘法是用最简的方法求得一些绝对不可知的真值,而令误差平方之和为最小。
小二乘法通常用于曲线拟合(least squares fitti ng) 。
这里有拟合圆曲线的公式推导过程和vc实现。
最小二乘法拟會圆曲线;= (x- +R2 = +- 2By4-B2令a=-2J4b = -2Bc = J^ +矿-0可得圆曲线方程的另一个册式Ix2 -\-y3十切十u = 0只要求出参数就可以求得圆心半径的参教;d)样本集(禺<并e (123…N)中点到圆心的距离为a:打=(禺・4)2+(E傢点(耳乙)到圆边嫌的距离的平方与和半径平方的差为:@=£2_衣=(圣.4)2+(込.8)2_氏2=血2+込2+込+&乙+卍令Q(a,b,c)为Q的平方和:Q(aM = Z^2=工【(*/ + §2 + 込+b 齐+C)]2求参数a f b,c使得Q(a,g的值最小值。
解・PTT •平方差Qgg大于0,因此函数存在大于或等于0的极小值,极大值为无穷大.F(a,M)对a,吐求偏导,令偏导等于0,得到极值点,比较所有极值点的函数值即可得到最小值.绘仏"疋)=工2窗 +里+込+埒+c)Xjda —=0 迤(a,bQ =匸2阳+貯+込+坷+训=0範仏上疋)=工2(禺2+乙2+込 +空+° = 0 d解这个方程组。
(2)(3)(4)di(诵先消去c(2) W ⑷*工扎得:Ng 代'+Y-+aX +bY + c)X -工莎‘ +严 +aX +bY+c)x^X = 0 N^(X 2 +Y : +bY)X -^(X : +Y : +aX +bY)x^X =0("工禺2_工兀工兀)a + (“Y*占一工禺工齐仏(*+ + M 工*必2 -工牡丁 +去2)工禺=0(3) *N_⑷*工£得:N 工(X’ + y' + oZ +bY+c)Y-^(X 2 +Y- +aX +bY + c)x^Y =Q 吧(/+护 +aX +bY)Y +Y : +aX +dK)xVy =o (N'X 必一工禺工齐归+ (“丫呼一工§工齐)3 +“Y+N 工厅一 g af +严)三齐=o C =〔NgQ -gX 二X)D = (N 工尤F -工龙三卩)E-N^X 、+N^XY -工疔+丫‘)工XG = (NM 旷-三丫工丫)H =NW X'Y 七NT H -工 2’ +K-)YK可解得:|G? + Db + 5 = 0Da+Gb + H = 0HD-EG a = r CG-D 、v HC- ED o =D' _GC 工(疔+齐2)+幺工兀+c ―― ---------------------------------------------- N得A 、B 、R 的估计拟合值:R= - Ja‘ +2?' -牡 2(6)matlab 实现:function [R,A,B]=circ(x,y,N)x1 = 0;x2 = 0;x3 = 0;y1 = 0;y2 = 0;y3 = 0;x1y1 = 0;x1y2 = 0;x2y1 = 0;for i = 1 : Nx1 = x1 + x(i);x2 = x2 + x(i)*x(i);x3 = x3 + x(i)*x(i)*x(i);y1 = y1 + y(i);y2 = y2 + y(i)*y(i);y3 = y3 + y(i)*y(i)*y(i); x1y1 = x1y1 + x(i)*y(i); x1y2 = x1y2 +x(i)*y(i)*y(i); x2y1 = x2y1 + x(i)*x(i)*y(i); endC = N * x2 - x1 * x1;D = N * x1y1 - x1 * y1;E = N * x3 + N * x1y2 - (x2 + y2) * x1;G = N * y2 - y1 * y1;H = N * x2y1 + N * y3 - (x2 + y2) * y1;a = (H * D - E * G)/(C * G - D * D);b = (H * C - E * D)/(D * D - G * C);c = -(a * x1 + b * y1 + x2 + y2)/N;A = a/(-2); %x 坐标B = b/(-2); %y 坐标R = sqrt(a * a + b * b - 4 * c)/2;void CViewActionImageTool::LeastSquaresFitting(){if (m_nNum<3){ return; } int i=0;double X1=0;double Y1=0;double X2=0;double Y2=0;double X3=0;double Y3=0;double X1Y1=0;double X1Y2=0;double X2Y1=0;for (i=0;i<m_nNum;i++){X1 = X1 + m_points[i].x;Y1 = Y1 + m_points[i].y;X2 = X2 + m_points[i].x*m_points[i].x;Y2 = Y2 + m_points[i].y*m_points[i].y;X3 = X3 + m_points[i].x*m_points[i].x*m_points[i].x;Y3 = Y3 + m_points[i].y*m_points[i].y*m_points[i].y;X1Y1 = X1Y1 + m_points[i].x*m_points[i].y;X1Y2 = X1Y2 + m_points[i].x*m_points[i].y*m_points[i].y;X2Y1 = X2Y1 + m_points[i].x*m_points[i].x*m_points[i].y; } double C,D,E,G ,H,N;double a,b,c;N = m_nNum;C = N*X2 - X1*X1;D = N*X1Y1 - X1*Y1;E = N*X3 + N*X1Y2 - (X2+Y2)*X1;G = N*Y2 - Y1*Y1;H = N*X2Y1 + N*Y3 - (X2+Y2)*Y1;a = (H*D-E*G)/(C*G-D*D);b = (H*C-E*D)/(D*D-G*C);c = -(a*X1 + b*Y1 + X2 + Y2)/N;double A,B,R;A = a/(-2);B = b/(-2);R = sqrt(a*a+b*b-4*c)/2; m_fCenterX = A; m_fCenterY = B;m_fRadius = R; return;}。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。