实验三 串级控制实验2016
实验三 水箱液位串级控制系统实验
(实验三)水箱液位串级控制系统实验报告班级测控四班学号0800201428 姓名王常玥一、实验目的1.通过实验了解水箱液位串级控制系统组成原理。
2.掌握水箱液位串级控制系统调节器参数的整定与投运方法。
3.了解阶跃扰动分别作用于副对象和主对象时对系统主控制量的影响。
4.掌握液位串级控制系统采用不同控制方案的实现过程。
二、实验原理本实验为水箱液位的串级控制系统,它是由主控、副控两个回路组成。
主控回路中的调节器称主调节器,控制对象为锅炉汽包,其液位为系统的主控制量。
副控回路中的调节器称副调节器,控制对象为上水箱,又称副对象,其液位为系统的副控制量。
主调节器的输出作为副调节器的给定,因而副控回路是一个随动控制系统。
副调节器的的输出直接驱动电动调节阀,从而达到控制液位的目的。
为了实现系统在阶跃给定和阶跃扰动作用下的无静差控制,系统的主调节器应为PI 或PID控制。
由于副控回路的输出要求能快速、准确地复现主调节器输出信号的变化规律,对副参数的动态性能和余差无特殊的要求,因而副调节器可采用P 调节器。
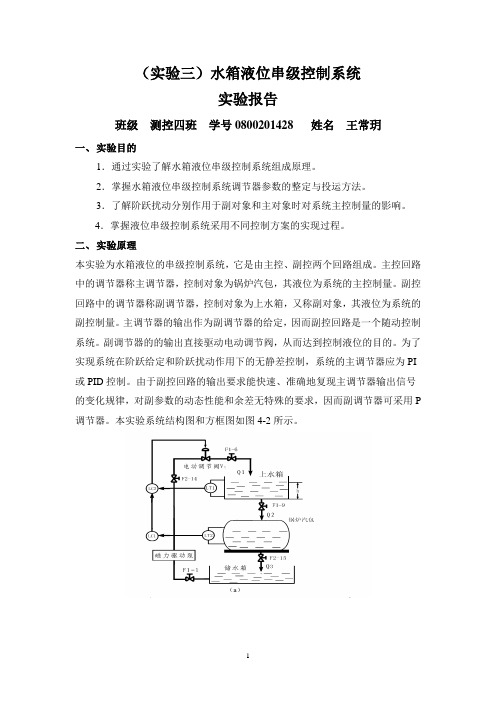
本实验系统结构图和方框图如图4-2所示。
图4-2 水箱液位串级控制系统(a)结构图(b)方框图三、实验设备DDD-Z05-I实验对象及DDD-Z05-IK控制屏、DDD-Z05-III 电源控制柜一台、SA-12挂件一个、SA-13A挂件一个、计算机一台、万用表一个、实验连接线若干。
四、实验内容与步骤本实验选择上水箱和锅炉汽包,实验之前先将储水箱中贮足水量,然后将阀门F1-1、F1-6、F2-14全开,F1-9 、F2-15开适当开度(F1-9﹥F2-15),其余阀门均关闭。
1.按照第一章1-6用网线和交换机连接操作员站和服务器,以及服务器和主控单元,“SA31 FM148现场总线远程I/O模块”、“SA31 FWM158现场总线远程I/O模块”挂件挂到屏幕上,并将挂件的通讯线街头插入屏内Profibus-DP总线接口上,将控制屏左侧Profibus-DP总线连接到主控单元DP口,并按照下面的控制屏接线图连接实验系统。
实验三、串级控制系统仿真

1 m2
0.8 m1
Object 1 Object 1
PV
Out1 1
精品PPT
1.4
1.2
1
0.8
c(t)
0.6
0.4
0.2
0
0
50
100
150
200
250
300
350
400
450
500
Time(Sec) 精品PPT
计算性能参数:
>> tp=spline(y,t,max(y)) >> sigma=max(y)-1= 8.92% >> ess=1-y(length(t))=0
Manual Switch1
Ground
1 SV2
PID Co n tro l l e r Controller 1
Manual Switch
0 Second disturb
PID Co n tro l l e r Controller 2
0 First disturb
Object 2 Object 2
精品PPT
3
2.5
2
0.63c()
1.5
c(t)
1
0.28c()
0.5
0
0
t1 50
t2100
150
200
250
300
Time(Sec)
350
400
450
500
精品PPT
③ 广义对象传函
由式(3-36)
To
3 2
(t2
t1);
(t2
To ) 10
于是,Wo'
2.716 e23.14s 83.323s 1
串级控制实验步骤-给学生

过程控制系统实验报告姓名:黄佳鑫班级:自动化1201学号:1210410106实验三:利用MATLAB/对串级控制系统进行仿真一、实验目的1.学会利用MATLAB/Simulink 对串级控制系统进行参数整定。
2.学会利用MA TLAB/Simulink 分析串级控制系统的抗干扰能力。
二、实验设备安装Windows 系统和MATLAB 软件的计算机一台。
三、实验内容构成以锅炉温度为主变量,锅炉夹套温度为副变量的串级控制系统,假设主、副对象传递函数分别为试采用串级控制设计主、副PID 控制器的参数,并与等效的简单控制系统进行抗干扰能力的比较。
四、实验步骤1.系统设计和参数整定1)简单控制系统(1) 利用NCD Outport ( 或Signal Constraint )模块,建立如下图所示的简单控制系统的Simulink 结构图。
图一 仿真电路图首先点击Simulation →Configuration Parameters(stop time 设置为100,其余参数采用默认值) 在MA TLAB 窗口中利用以下命令对PID 控制器的初始值进行任意设置:>>Kc=1;Ti=1;Td=1; 然后,双击Signal constraint →g oals →desired response →点击第2个选框→进行设置参数(Settling Time 为25、Rise Time 为15、% overshoot 为12,其余参数采用默认值)单机ok 。
图二11()(301)(31)p G s s s =++221()(101)(1)p G s s s =++注:在图二中应注意把Final value的值改到和给定值相同的值,因为我们控制的最终目的是达到给定要求。
Optimization →T uned Parameters→add(添加需要优化的参数,参数采用默认值)→点击ok。
图三注:在操作图三的过程中,应采取默认值,因为我们实验前不知道参数的准确范围,所以采用默认参数,如若能确定参数的范围,可以进行最大值和最小值的修改,但范围尽量选的较大。
实验三 串级控制实验2016

实验三串级控制实验一、实验目的1.熟悉串级控制系统的结构与特点。
2.掌握串级控制系统的投运与参数整定方法。
3.了解阶跃扰动分别作用于副对象和主对象时对系统主变量的影响。
二、实验设备1.PCS-C型过程控制综合实验装置(DDC控制单元、信号及控制板)。
2.计算机及MCGS组态软件(PCS-C-DDC.MCG)。
3.实验专用线若干及九芯通讯线两根。
三、实验原理本实验采用计算机控制,将下水箱液位控制在设定高度。
串级回路是由内反馈组成的双环控制系统,属于复杂控制范畴。
在计算机中设置了两个虚拟控制器作为主副控制器。
将上水箱的液位信号输出作为主控制器输入,主控制器的输出作为副控制器的输入,在串级控制系统中,两个控制器任务不同,因此要选择控制器的不同调节规律进行控制,副控制器主要任务是快速动作,迅速抵制进入副回路的扰动,至于副回路的调节不要求一定是无静差。
主控制器的任务是准确保持下水箱液位在设定值,因此,主控制器采用PI控制器也可考虑采用PID控制器。
上下水箱液位串级控制系统的方块原理图如图4.2所示。
图4.1 液位串级控制系统块原理图串级控制系统的参数整定参考本章概述部分内容。
四、实验步骤与内容1.了解实验装置中的对象,流程图如图4.2所示。
图4.2 上下水箱液位串级控制系统流程图2.按图4.3接好实验导线和通讯线。
图4.3上下水箱双容串级控制实验接线图(高联实验台)上下水箱双容串级控制实验接线图(云创实验台)3.将控制台背面的通讯口与上位机连接。
4.将手动阀门1V1、V4、V6打开,将手动阀门1V6、1V7、LV关闭。
5.先打开实验对象的系统电源,然后打开控制台上的总电源,再打开直流电压和DDC控制单元电源。
6.打开计算机上的MCGS运行环境,选择“系统管理”下拉菜单中的“用户登录”,出现如下界面。
图4.4 用户登录界面7.点击“确认”,用户登录完毕。
选择“串级控制实验”下拉菜单中的“上下水箱双容控制实验”。
实验3 串级控制系统实验

实验三串级控制系统实验
一.试验类型:设计型。
二.实验目的:
⒈掌握串级控制系统的组成、结构和设计方法。
⒉掌握串级控制系统的投运步骤。
⒊掌握控制器参数的整定方法。
⒋掌握串级控制系统回路状态的无扰动切换方法。
三.实验内容:
水槽的液位控制系统:
针对过程控制实验装置,设计水槽的液位串级调节系统。
设计并实施控制方案,进行参数整定。
四.实验要求:
⒈根据工艺流程设计控制方案,确定测量点和控制点(调节量和被调量),绘出控
制系统工艺流程图。
⒉绘出控制系统方框图。
⒊画出控制系统电路原理图。
⒋按步骤投运,进行控制器参数整定,加干扰测试,使系统达到4:1衰减过渡过
程。
五.实验设备:
⒈被控对象:水槽液位。
⒉控制装置:PLC。
⒊仪表:液位变送器。
⒋执行器:电动调节阀。
⒌附属设施:变频器,水泵等。
六.预习要求:
预习串级控制系统相关知识。
严格按实验要求中各项内容进行准备,绘制所需图表,描述整定方法,并准备调试过程数据记录表格。
预先确定实验步骤。
七.实验报告要求
⒈控制方案说明,系统方框图和接线图。
⒉参数整定结果及相应过渡过程曲线。
⒊总结PID参数对控制效果的影响。
4.与实验二的结果对比,分析串级控制系统的特点。
八.思考题
⒈串级控制系统的特点。
4。
实验3 串级与单回路控制系统对比实验 实验报告

仲恺农业工程学院实验报告纸自动化 (院、系) 工业自动化 专业 工化 144 班 组 过程控制 课学号06/07/30 姓名 黄国盛、邓炎钊、汤敬麟 实验日期 教师评定串级与单回路控制系统对比实验一、 实验内容某隧道窖炉系统,以烧成带温度为主变量,燃烧室温度为副变量的串级控制系统,见右图。
其主副对象的传递函数G o1,G o2分别为:1)1)(3s (30s 1(s)1o ++=G 22)1)(s 1(10s 1(s)++=o G 调节规律选择:单回路采用PI 控制:串级主控制器采用PI 控制;副控制器采用P 控制。
二、 实验设备PC 一台、MATLAB R2015b三、实验要求1)试分别采用单回路和串级控制设计,画出控制系统原理框图。
2)进行参数整定,并给出整定后系统的阶跃响应曲线,并计算衰减率、调节时间、余 差。
3)分别加一次、二次单位阶跃扰动,给出响应曲线,计算超调量。
4)填写下表,对比实验结果,说明不同控制方案对系统的影响。
表一系统采用单回路控制和串级控制的对比四、实验指导1)用Simulink仿真;2)PID控制器模块的参数分别是比例增益、积分增益、微分增益;五、实验结果和分析1、建立单回路控制系统模型:图1 单回路PI控制系统模型整定结果为:P=1.4143 ; I=0.094741; 其阶跃响应曲线如下图:图2 单回路PI控制系统阶跃响应曲线图2、建立串级控制系统模型:图3 串级控制系统模型整定结果为:主控制器P=2.1877 ,I=0.11102; 副控制器P=4.8299其阶跃响应曲线如下图:图4 串级控制系统阶跃响应曲线图单回路控制和串级控制对比:图5 单回路控制和串级控制对比图因为主环是一个反馈控制,所以串级控制方案具有单回路控制系统的全部功能,但由于串级控制系统在结构上多一个副回路(随动控制),所以串级控制具有其余的一些优点:1、串级控制系统具有更高的工作频率。
由于副回路的存在,改善了对象的特性,使系统的工作频率得到提高。
《过程控制工程》3 串级控制系统

主 : P G P T ( ) T G T T ( ) e 1 G C 1( ) u 1 e 2 z 2 u . 1 e 2 P G P T ( ) T
b. 干扰进入主回路
R1(s) e1 GCT(s) u1 e2 GCP(s) u2
原料 出口
T2C
T2T
TC TT PC PT
燃料 原料
方框图
R1(s)
R2(s) GCT(s)
Z1(s)
Z2(s)
GCP(s)
温度-压力串级控制
GV(s)
D2(s)
D1(s)
Y2(s)
Y1(s)
GPP(s)
GPT(s)
GTP(s)
GTT(s) . 串级控制系统方框图
3)串级控制主要参数及环节
TC TT
q
P(s)
T(s)
GV(s)
GPP(s)
GPT(s)
(-)
(+)
(+)
GTP(s)
(+)
GTT(s)
(+)
串级控制系统方框图
➢设定元件作用方式:
温度对象:正作用(+) 测量变送器:正作用(+) 压力对象:正作用(+) 压力控制器:正作用(+) 调节阀门:气关阀(-). 温度控制器:副作用(-)
2)动作分析
➢ 副被控变量(副参数) 为稳定主参数而设定的中间(辅助)被控变量。 例如:例中精馏塔再沸器. 加热蒸汽压力。
b. 构成单元环节
TC TT PC PT
R1(s)
R2(s) GCT(s)
Z1(s)
Z2(s)
GCP(s)
GV(s)
D2(s)
D1(s)
计算机控制技术 串级控制算法的研究实验

计算机控制技术串级控制算法的研究实验
计算机控制技术中的串级控制算法是一种常用的控制策略,它通过两个或更多的控制器串联起来,形成一个多层次的控制系统。
这种算法在许多领域都有广泛的应用,例如化工过程控制、电力系统和污水处理等。
为了研究串级控制算法,需要进行实验。
以下是一个可能的实验步骤:
1. 确定实验目标:首先需要明确实验的目标,例如提高系统的稳定性、减小系统的超调量等。
2. 构建控制系统:根据实验目标,设计一个由两个或更多的控制器串联组成的控制系统。
这些控制器可以是比例-积分-微分(PID)控制器、模糊控制器或其他类型的控制器。
3. 模拟实验:使用计算机软件模拟控制系统的工作过程,输入不同的干扰信号,观察系统的响应和性能。
4. 分析实验结果:对实验结果进行分析,比较不同控制算法的性能,找出最优的控制参数和策略。
5. 改进控制系统:根据实验结果,对控制系统进行改进,提高其性能和稳定性。
6. 实际应用:将改进后的控制系统应用到实际场景中,验证其性能和效果。
在进行串级控制算法的研究实验时,需要注意以下几点:
1. 保证实验条件的一致性:在进行实验时,需要保证所有实验条件的一致性,例如输入信号、初始条件和系统参数等。
2. 充分考虑干扰因素:在实际应用中,系统会受到许多干扰因素的影响,因此在实验中需要充分考虑这些因素,模拟真实情况下的系统响应。
3. 比较不同控制算法的性能:在进行串级控制算法的研究实验时,需要与其他控制算法进行比较,找出最优的控制策略和参数。
4. 充分挖掘数据价值:通过分析实验数据,可以深入了解系统的动态特性和性能指标,为控制算法的优化提供依据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验三串级控制实验
一、实验目的
1.熟悉串级控制系统的结构与特点。
2.掌握串级控制系统的投运与参数整定方法。
3.了解阶跃扰动分别作用于副对象和主对象时对系统主变量的影响。
二、实验设备
1.PCS-C型过程控制综合实验装置(DDC控制单元、信号及控制板)。
2.计算机及MCGS组态软件(PCS-C-DDC.MCG)。
3.实验专用线若干及九芯通讯线两根。
三、实验原理
本实验采用计算机控制,将下水箱液位控制在设定高度。
串级回路是由内反馈组成的双环控制系统,属于复杂控制范畴。
在计算机中设置了两个虚拟控制器作为主副控制器。
将上水箱的液位信号输出作为主控制器输入,主控制器的输出作为副控制器的输入,在串级控制系统中,两个控制器任务不同,因此要选择控制器的不同调节规律进行控制,副控制器主要任务是快速动作,迅速抵制进入副回路的扰动,至于副回路的调节不要求一定是无静差。
主控制器的任务是准确保持下水箱液位在设定值,因此,主控制器采用PI控制器也可考虑采用PID控制器。
上下水箱液位串级控制系统的方块原理图如图4.2所示。
图4.1 液位串级控制系统块原理图
串级控制系统的参数整定参考本章概述部分内容。
四、实验步骤与内容
1.了解实验装置中的对象,流程图如图4.2所示。
图4.2 上下水箱液位串级控制系统流程图
2.按图4.3接好实验导线和通讯线。
图4.3上下水箱双容串级控制实验接线图(高联实验台)
上下水箱双容串级控制实验接线图(云创实验台)
3.将控制台背面的通讯口与上位机连接。
4.将手动阀门1V1、V4、V6打开,将手动阀门1V6、1V7、LV关闭。
5.先打开实验对象的系统电源,然后打开控制台上的总电源,再打开直流电压和DDC控制单元电源。
6.打开计算机上的MCGS运行环境,选择“系统管理”下拉菜单中的“用户登录”,出现如下界面。
图4.4 用户登录界面
7.点击“确认”,用户登录完毕。
选择“串级控制实验”下拉菜单中的“上下水箱双容控制实验”。
出现如下的“上下水箱双容串级控制实验”界面。
8.点击“参数设置”,出现如下界面。
图4.6 参数设置界面
9.将AI0、AI1都设置为0–50。
点击退出,参数设置完毕。
10.按本章第一节中的整定法,选择控制规律,并按整定后的PID参数进行调节器参数设置。
Ts=1 (参考值)SV=20 (参考值)Kc1=5 (参考值)Ti1=100 (参
考值)
Td1=0 (参考值)Kc2=1.5 (参考值)Ti2=100 (参考值)Td2=0 (参考值)
11.选择计算机控制方式。
12.在信号板上打开电动调节阀输入信号、上水箱1输出信号、下水箱输出信号。
13.在控制板上打开水泵1、电动调节阀。
14.观察计算机上的实时曲线和历史曲线。
15.待系统稳定后,给定加个阶跃信号,观察其液位变化曲线。
16.再等系统稳定后,给系统加个干扰信号,观察液位变化曲线。
五、实验建议
调节器的PID参数可以反复凑试,逐步逼近达到最佳的整定,实际中,采用串级调节系统是为了提高主被调量(下水箱)精度和改善动态特性而设置的,因此对副调回路的质量指标没有要求。
而对主回路的质量指标要求高。
牺牲副回路的质量,保证主回路的调节质量。
所以副调节器比例作用强一些,取消积分作用,主调节器设置P、I、D参数即可。
六、实验报告要求
1.写出常规实验报告,画出液位串级控制系统的结构框图。
2.用实验方法整定控制器的相关参数,写出整定过程。
3.根据扰动分别作用于主、副对象时系统输出的响应曲线,分析系统在阶跃扰动作用下的静、动态性能。
4.分析主、副控制器采用不同PID参数时对本实验系统性能的影响。
七、思考题
1.试述串级控制系统为什么对主扰动(二次扰动)具有很强的抗扰能力?如果副对象的时间常数与主对象的时间常数大小接近时,二次扰动对主控制量的影响是否仍很小,为什么?
2.当一次扰动作用于主对象时,试问由于副回路的存在,系统的动态性能比单回路系统的动态性能有何改进?。