采煤机自动调高液压控制系统的优化研究
采煤机滚筒自动调高技术的分析
采煤机滚筒自动调高技术的分析【摘要】采煤机械是进行破煤和装煤的机器,是机械化和综合机械化采煤工作面的主要设备之一。
目前,煤矿井下广泛使用的采煤机械有两类:滚筒式采煤机和刨煤机。
滚筒采煤机是以螺旋滚筒作为工作机构的采煤机械,当滚筒旋转并截入煤壁时,利用安装在滚筒上的截齿将煤破碎,并通过滚筒上的螺旋叶片将破碎下来的煤装入刮板输送机。
刨煤机是一种采用刨削方式落煤的采煤机械,刨刀刨削煤壁将煤刨落,刨落的煤在刨头犁形斜面的作用下被装入输送机送出采煤工作面。
本文主要介绍了滚筒式采煤机的种类、组成、原理和旋转方向,并阐述了滚筒自动调高技术,对于指导采煤机的工作具有重要参考价值。
【关键词】采煤机;滚筒;种类;组成;自动调高;控制条件1 滚筒式采煤机的种类由于滚筒式采煤机的采高范围大,对各种煤层适应性强,能截割硬煤,并能适应较复杂的顶底板条件,因而得到了广泛的应用。
刨煤机要求的煤层地质条件较严,一般适用于煤质较软不粘顶板、顶底板较稳定的薄煤层或中厚煤层,故应用范围较窄。
但是刨煤机结构简单,尤其在薄煤层条件下劳动生产率较高。
滚筒式采煤机的种类较多,按工作机构的数量可分为单滚筒和双滚筒,前者多用于薄煤层,后者多用于中、厚煤层;按牵引方式可分为链牵引与无链牵引采煤机;按牵引部位置可分为内牵引和外牵引;按牵引部动力可分为机械牵引、液压牵引与电牵引;按牵引部的调速方式可分为液压调速、机械调速和电机调速等。
2 滚筒采煤机的主要组成部分滚筒采煤机的类型很多,但基本上以双滚筒采煤机为主,其基本组成部分也大体相同。
2.1 电动机及其电气设备电动机及其电气设备主要包括电动机1和电气控制箱13。
电动机1是采煤机的动力部分,它通过两端出轴驱动滚筒和牵引部。
电动机为防爆型鼠笼式。
电气控制箱13内装有各种电控元件,以实现各种控制及电气保护。
2.2 牵引部牵引部的作用是带动采煤机在工作面作往复移动,以实现采煤机的连续割煤和装煤。
牵引部主要包括牵引部减速器和牵引机构。
井下采煤机自动调高液压系统的应用优化分析

井下采煤机自动调高液压系统的应用优化分析
赵海瑞
【期刊名称】《机械管理开发》
【年(卷),期】2024(39)5
【摘要】为进一步提升井下采煤机运行的自动化与智能化水平,结合某煤矿企业井下采煤机调高工作现状,对井下采煤机自动调高液压系统进行优化设计。
首先对整体方案进行优化设计,而后分别从硬件和软件两个层面着手,探讨了该系统优化设计的要点内容。
最后对该系统进行实际测试,测试结果显示,此次优化设计得到的井下采煤机自动调高液压系统在各项主要指标上均具有一定优势,证明其具有一定应用价值。
【总页数】3页(P245-247)
【作者】赵海瑞
【作者单位】内蒙古同煤鄂尔多斯矿业投资有限公司
【正文语种】中文
【中图分类】TD823.97
【相关文献】
1.采煤机自动调高液压控制系统的优化研究
2.采煤机液压调高系统的优化分析
3.采煤机自动调高液压系统的优化控制研究
4.故障树分析在采煤机调高液压系统中的应用
5.采煤机液压调高系统的外设备用调高系统
因版权原因,仅展示原文概要,查看原文内容请购买。
采煤机滚筒自动调高的液压控制方法

机床与液压
MACHI NE T0OL & HYDRAUL I CS
Fe b . 2 01 3
第4 1 卷 第 4期
Vo 1 . 41 No . 4
D O I : 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 1 — 3 8 8 1 . 2 0 1 3 . 0 4 . 0 2 9
X u z h o u J i a n g s u 2 2 1 1 1 6 ,C h i n a )
Ab s t r a c t :S h e a r e r d r u m a u t o m a t i c h e i g h t a d j u s t m e n t i s o n e o f t h e k e y t e c h n o l o g i e s o f r e a l i z i n g t h e a u t o m a t i o n o f c o a l m i n i n g .
矿井下实验证 明:采ห้องสมุดไป่ตู้该方法 时 ,在 自动跟 踪采煤 机记忆 切割 路径 的基础上 能够 有效识 别 出滚 筒切 割到 岩石 时的异 常状
态 ,并对滚筒高度做 自动液压调节 ,能够满足复杂地质条件下采煤机滚筒 自动调高的控制要求 。
关键词 :采煤机 ; 自动调高 ;液压控制 ;记忆截割 ;煤岩分界
中 图分 类 号 :T I M2 1 . 6+1 文献 标 识 码 :A 文 章 编 号 :1 0 0 1— 3 8 8 1( 2 0 1 3 )4—1 0 0— 2
A Hy d r a u l i c C o n t r o l Me t h o d o f A u t o ma t i c He i g h t Ad j u s t me n t f o r S h e a r e r Dr u m
《基于自适应预见控制的采煤机摇臂自动调高控制方法研究》范文

《基于自适应预见控制的采煤机摇臂自动调高控制方法研究》篇一一、引言随着煤炭开采技术的不断进步,采煤机作为煤炭开采的核心设备,其自动化、智能化水平已成为衡量煤炭开采效率与安全性的重要指标。
采煤机摇臂的自动调高控制作为采煤机作业过程中的关键环节,其控制方法的优化对于提高采煤效率、保障作业安全具有重要意义。
本文将针对基于自适应预见控制的采煤机摇臂自动调高控制方法进行研究,旨在提高采煤机的工作效率和安全性。
二、采煤机摇臂自动调高控制现状及问题目前,采煤机摇臂的调高控制主要依赖于传统的PID控制方法。
然而,在实际应用中,由于煤炭开采环境的复杂性和多变性,传统PID控制方法往往难以满足高精度、高效率的作业需求。
此外,传统控制方法对于突发情况的处理能力较弱,容易引发设备故障,影响煤炭开采的安全性和效率。
因此,有必要对采煤机摇臂的自动调高控制方法进行优化。
三、基于自适应预见控制的采煤机摇臂自动调高控制方法为了解决传统控制方法在煤炭开采过程中的不足,本文提出基于自适应预见控制的采煤机摇臂自动调高控制方法。
该方法通过引入自适应控制和预见控制技术,实现对采煤机摇臂的精确控制和智能预测。
(一)自适应控制技术自适应控制技术能够根据采煤机摇臂的工作状态和环境变化,实时调整控制参数,以适应不同的工作条件。
通过建立摇臂动态模型,实时获取摇臂的位置、速度、加速度等状态信息,结合环境因素进行控制参数的在线调整,提高控制系统的适应性和鲁棒性。
(二)预见控制技术预见控制技术通过预测采煤机摇臂的未来运动状态,实现对摇臂的预见性控制。
通过对历史数据和实时数据的分析,结合工作面的地质条件和煤层分布,预测摇臂未来的运动轨迹和工况,提前调整控制参数,使摇臂能够更好地适应工作面的变化。
(三)基于自适应预见控制的控制策略基于自适应预见控制的采煤机摇臂自动调高控制策略将自适应控制和预见控制相结合,形成一种智能化的控制方法。
通过实时调整控制参数和预见性调整策略,实现对采煤机摇臂的高精度、高效率控制。
MG2×300W型采煤机调高液压系统的改进

MG2×300W型采煤机调高液压系统的改进
杨晓民;孙臣君;薛元成;吴书胜
【期刊名称】《煤矿机械》
【年(卷),期】1998()8
【摘要】自1990年使用MG2×300W型采煤机以来,我们在使用中除发现该采煤机机械传动部分存在着行走箱滚轮爬齿顶压馈齿条、行走箱联接件结构和强度不足等问题外,还经常出现摇臂不升降故障。
造成摇臂不升降的主要原因是调高液压系统经常出故障所致。
因此,下面就调高液...
【总页数】3页(P36-38)
【关键词】采煤机;调高液压系统;结构改造
【作者】杨晓民;孙臣君;薛元成;吴书胜
【作者单位】鹤岗矿务局
【正文语种】中文
【中图分类】TD421.606
【相关文献】
1.电牵引采煤机喷雾系统及液压调高系统的改进 [J], 周新建
2.电牵引采煤机喷雾系统及液压调高系统的改进 [J], 周新建
3.MG2×125/560采煤机调高系统改造研究 [J], 赵志宙
4.MG500/1130-WD型采煤机调高液压系统维护与保养的改进建议 [J], 张海英;
杨娜
5.MG2×132/630-WD采煤机液压制动与调高系统设计 [J], 王先锋
因版权原因,仅展示原文概要,查看原文内容请购买。
采煤机截割滚筒自适应液压调高系统设计

25 液压与气动
采煤机截割滚筒自适应液压调高系统设计
周晓谋,张岩军,王忠宾
Design of Adaptive Height Adjustment Hydraulic System for Shearer Drum
往往是不一样的, 利用煤层与岩石层硬度的不同, 在采 煤机截割头安装压力传感器, 当采煤机截割头碰触到 煤岩分界层时, 安装在采煤机截割头的压力传感器就 会将截割头压力和应变的变化情况反馈给控制系统 。 通过控制系统将采集到的压力变化信号与内部数据库 数据进行对比, 就能很好的识别出煤层厚度。 采煤机
参考文献: [ 1] 于励民. 煤 矿 机 械 液 压 传 动[M] . 北 京: 煤 炭 工 业 出 版 2008. 社, [ 2] 张修荣. 采煤机滚筒自适应液压调高系统研究究[ D] .陕 2009. 西: 西安科技大学, [ 3] 刘士阁, J] .煤 刘文东, 张锋. 采煤机液压调高系统改进[ 2011 , ( 6 ) : 184 - 185. 矿机械,
2012 年第 3 期 26 液压与气动
过多, 采煤机截割部容易触碰到顶板和底板, 造成冲 , , 。 击 长期如此 对采煤机的危害极大 为解决上述问 采煤机截割滚筒自适应调高控制系统成为当下热 题, 点研究问题。下面对采煤机截割滚筒自适应液压调高 系统做一下简要分析与研究。 1 采煤机截割滚筒液压调高系统基本原理 采煤机截割滚筒的调高主要是通过调高油缸来实 现的, 典型的调高系统原理图如下图 1 所示。
ZHOU Xiaomou,ZHANG Yanjun,WANG Zhongbin
( 中国矿业大学 机电工程学院,江苏 徐州 221116 )
பைடு நூலகம்
要: 采煤机截割滚筒的自适应调高对煤矿井下综采工作面的自动化和高效化生产有着重要的影响 , 该文提出了一种采煤机截割滚筒自适应液压调高系统的实现方法 , 该方法能够解决采煤机摇臂在正常工作 摘 中根据煤层厚度的变化进行自动调高的问题 。 关键词: 采煤机; 滚筒; 液压系统; 自适应调高; 控制系统 中图分类号: TH137 0 引言 文献标识码: B 4858 ( 2012 ) 03002502 文章编号: 1000环境, 加之工作面粉尘大, 噪声大,单靠人眼很难判断 底板的准确位置, 采煤机切割过 煤层的厚度和顶板、 少, 煤层不能充分开采, 造成对资源的极度浪费,切割
MG5001130-WD 型采煤机调高液压系统维护与保养的改进建议
1引言MG500/1130-WD 型采煤机调高液压系统由电动机、双联齿轮泵、摇臂调高油缸、吸油过滤器、精滤油器组件、多路换向阀组件、2个电磁阀组件、制动电磁阀、冷却器、空气滤清器、压力表及油箱、管路系统等组成。
所有的元、部件都要进行定期维护与保养,这样才能保证采煤机的正常工作。
设备只有在完好状态下才能确保人员的安全和可靠稳定的生产工作。
2MG500/1130-WD 型采煤机简介2.1采煤机简介采煤机是煤矿综合机械化采煤的重要设备之一,综合机械化采煤可以减轻工人的体力劳动、提高生产安全性,达到高产量、高效率、低消耗的目的,相对炮采来说既提高生产的安全性,又提高产量,是现代化煤矿建设的主要采煤方法。
MG500/1130-WD 型电牵引采煤机是一种多电机驱动,电机横向布置,交流变频调速无链双驱动电牵引采煤机。
本机总装机功率1130kW ,机面高度1576mm ,适用于采高2240~4500mm ,适应倾角≤20°(工作面倾斜方向),±10°(工作面走向方向)的中厚煤层综采工作面,要求煤层顶板中等稳定,底板起伏大,过于松软,煤质硬或中硬,能截割一定的矸石夹层。
该型号采煤机的电气设备符合矿用防爆(防爆是指能够抵抗爆炸的冲击力的热量而不受损失仍能正常工作称为防爆)规程的要求,《煤矿安全规程》中所规定的安全含量的矿井中使用,并可在空气湿度大于95%(在+25℃时)的情况可靠地工作。
2.2采煤机型号的组成3MG500/1130-WD 型采煤机调高液压系统的组成及工作原理3.1调高液压系统的主要元件及其作用调高泵,属于动力元件,为系统提供压力能,把电动机输出的机械能转化为液体的压力能。
换向阀和平衡阀,属于控制元件,控制系统中工作介质的流向、压力及流量,从而控制执行元件的方向、压力和速度。
粗、精过滤器,属于辅助元件,过滤油液中的杂质颗粒。
油缸,属于执行元件,将系统中的机械能转化为压力能。
采煤机电液比例自动调高系统研究
采煤机电液比例自动调高系统研究随着煤炭工业的发展,采煤机已经成为煤炭生产过程中不可或缺的设备之一。
在采煤机的操作过程中,为了保证采煤效率和安全性,需要控制采煤机的工作状态。
采煤机电液比例自动调高系统是一种目前被广泛应用的采煤机控制系统,该控制系统可以自动调节液压系统的压力来控制采煤机的工作状态,从而实现更加稳定和高效的煤炭采集过程。
1. 采煤机电液比例自动调高系统的原理采煤机电液比例自动调高系统的原理是通过对传感器监测到的信号进行处理来控制液压系统的压力,从而实现采煤机的自动调节。
系统主要包括传感器、控制器和执行器三部分。
(1)传感器:采煤机电液比例自动调高系统的传感器主要是液压传感器和位移传感器。
液压传感器可以用来监测液压系统的压力信号,而位移传感器则可以测量采煤机的行进距离和相对位置。
(2)控制器:采煤机电液比例自动调高系统的控制器是系统的核心组成部分,主要负责对传感器和执行器的控制。
通过对传感器信号的分析处理,控制器会自动调节执行器的信号输出,从而控制液压系统的压力,实现采煤机的自动调节。
(3)执行器:执行器是采煤机电液比例自动调高系统中的核心组成部分,它可以实现液压系统的调控。
执行器可以根据控制器的信号,实现对液压系统的压力进行调节,从而控制采煤机的工作状态,实现更加稳定和高效的煤炭采集过程。
2. 采煤机电液比例自动调高系统的优点采煤机电液比例自动调高系统有很多优点:(1)稳定性强:采煤机电液比例自动调高系统通过对液压系统的自动调控,可以实现采煤机在工作过程中的稳定性,从而有效提高工作效率。
(2)灵活性好:采煤机电液比例自动调高系统采用电液比例阀,可以根据不同的工作状态自动调节液压系统的压力,从而实现采煤机的灵活调控。
(3)自动化程度高:采煤机电液比例自动调高系统采用自动调节机制,可以根据采煤机在工作过程中的需要自动调节液压系统的压力,从而实现自动化操作。
(4)提高采煤效率:采煤机电液比例自动调高系统可以实现对采煤机在工作过程中的自动调节,从而提高采煤效率,减少能耗和人力成本。
采煤机牵引部的自动调速机理与自动控制系统分析
采煤机牵引部的自动调速机理与自动控制系统分析摘要:本文将结合真实的煤矿案例,对采煤机牵引部的自动调速机理、自动控制系统进行详细的分析与探究,旨在能够进一步优化采煤机的系统,降低其结构的复杂性,进而提高工作效率,缓解工人的压力。
关键词:采煤机牵引部;自动调速;自动控制中图分类号:TD67 文献标识码:B 文章编号:前言对于采煤机而言,牵引部是其重要的组成部分之一,但在实际应用中很容易被损坏,影响着煤矿开采的进度。
由于煤矿开采的环境较为恶劣、复杂,所以就需要进一步提高采煤机牵引部力量、速度,增强其自身对煤矿环境的适应性,为解决采煤工作的问题提供保障。
对此,相关的研究人员、设计人员就应该加大研究与分析的力度,研制出性能更佳的零部件,进而增强采煤机牵引部的可靠性。
一、煤矿矿井概述该煤矿所处的位置属于向斜构造,其轴向为东西走向,长度在10千米左右,宽度为2.2千米,北翼的倾角在2度至5度之间,南翼的倾角在8度至12度之间,整体构造相对简单。
在本煤矿中,共包含2、3、4-1、4-2号煤层,为了提高开采效率,均采用,采煤机开展相关工作。
在煤矿中,4-2号煤层的特征如表1所述:表 1 4-2号煤层的特征二、采煤机牵引部的自动调速机理(一)自动调速的必要性分析(1)增加采煤机的牵引速度、力量和截割功率;(2)优化采煤机的自动调节特性,从而适应各种不同煤矿环境的需求,充分发挥其自身生产力优势。
由于在采煤的过程中,采煤机的司机无法准确估计工作面的实际变化,仅仅凭借自身的经验调节开采的速度,因此具有较强的盲目性,对此便需要将自动调速系统安装在牵引部上[1]。
对于采煤机而言,自动调速就是在根据牵引力、电动机功率的变化而自动调节速度,从而使采煤机能够一直处于满载的运行状态,保证采煤的工作质量与效率,同时还能够避免牵引机发生破坏。
在牵引机中,截割电机的实际负载受多方面因素的影响,如牵引速度、截深、采高、夹矸硬度、煤层硬度等。
《采煤机智能调高控制理论与技术》范文
《采煤机智能调高控制理论与技术》篇一一、引言采煤业作为国家经济发展的重要支柱,随着技术的进步,传统的人工操作模式逐渐向智能化和自动化方向转变。
在采煤过程中,智能调高控制技术尤为重要,因为它直接影响着煤炭的开采效率和安全。
本文将探讨采煤机智能调高控制的理论基础、技术发展及其在实践中的应用。
二、采煤机智能调高控制理论基础1. 控制系统架构采煤机智能调高控制系统主要由传感器、控制器和执行器三部分组成。
传感器负责实时感知采煤机的位置、速度、负载等信息;控制器则根据这些信息做出决策,并通过执行器实现控制。
这种闭环控制系统可以保证采煤机在各种工况下都能稳定运行。
2. 控制算法智能调高控制算法是采煤机控制系统的核心。
常见的算法包括PID控制、模糊控制、神经网络控制等。
这些算法可以根据采煤机的实际工况,实时调整控制参数,以达到最佳的开采效果。
三、采煤机智能调高控制技术发展1. 传感器技术传感器是采煤机智能调高控制系统的关键组成部分。
随着技术的发展,传感器逐渐向高精度、高稳定性的方向发展。
例如,激光雷达、红外传感器等的应用,使得采煤机能够更准确地感知周围环境。
2. 控制器技术控制器是采煤机智能调高控制系统的“大脑”。
随着计算机技术和人工智能技术的发展,控制器逐渐向高性能、高集成度的方向发展。
例如,采用FPGA(现场可编程门阵列)的控制器可以实现更快的处理速度和更高的可靠性。
3. 执行器技术执行器是采煤机智能调高控制系统的“手脚”。
随着电机和液压技术的进步,执行器逐渐向高效、低能耗的方向发展。
例如,采用永磁直流电机的执行器具有较高的效率和较长的寿命。
四、实践应用采煤机智能调高控制在实践中有着广泛的应用。
通过实时感知采煤机的位置、速度、负载等信息,控制系统可以自动调整采煤机的切割高度,以保证煤炭的开采效率和安全。
此外,智能调高控制还可以实现远程监控和故障诊断,进一步提高采煤机的可靠性和维护效率。
五、未来展望随着技术的不断进步,采煤机智能调高控制技术将进一步向高效、智能、环保的方向发展。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
引言目前,多数采煤机调高控制系统所采用的均为基于电磁阀的调高液压系统,其仅具备简单的开关执行操作,受液压系统工作压力影响较大,在综采过程中,常出现负载不足导致采煤机无法及时调整滚筒的工作高度满足对厚煤层的落煤需求,同时极大地增加了采煤机滚筒的调高时间,降低了采煤机综采时的工作效率[1],当采煤机滚筒幅度调整较小时又易导致出现流量过大、无法精确控制采煤机滚筒的运行轨迹等缺点。
因此如何提高采煤机调高系统工作的安全性和可靠性,对确保煤炭生产企业提高采煤机工作的自动化程度及综采效率具有十分重大的意义。
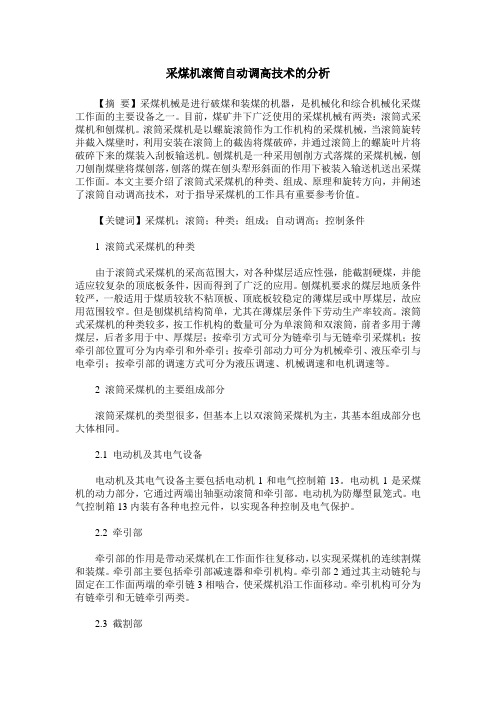
1采煤机调高液压控制系统的工作原理采煤机自动调高液压控制系统的结构如图1所示,其主要由摇臂、滚筒、执行油缸、液压泵站及控制系统等组成。
当采煤机需要根据巷道高度对滚筒的高度进行调节时,液压泵站的驱动电机带动液压泵开始工作,从油箱内将液压油传递到执行油缸内。
在驱动滚筒升降时,控制液压泵站内电磁换向阀的工作状态,使液压油通过电磁换向阀进入到执行油缸内,推动执行油缸的活塞杆伸出,直到达到指定的升高高度[2]。
当为执行调高换向时,采煤机的驱动滚筒的高度保持不变,此时液压油控制对液压系统回路的调节,使阀门保持在关闭状态,从而确保系统处于保压状态,维持驱动滚筒的高度。
在整个控制过程中,调高换向阀的阀芯在电磁力的控制下,不断地根据采煤机滚筒的工作高度要求进行调节,使液压油从不同的油口进入到执行油缸的有杆腔或者是无杆腔,使活塞杆执行伸出或者收缩,从而完成对于滚筒升降过程的调节控制[2]。
在整个液压控制系统中,安全阀用于确保滚筒位置的稳定性,溢流阀用于控制系统的工作压力,防止系统过载。
2执行油缸的数学模型根据对采煤机液压调高控制系统的分析,采煤机工作时执行油缸的平衡方程可表示为[3]:m d 2x d t 2+b d x d t=P 1A 1-P 2A 2-F f .(1)式中:A 1为执行油缸有杆腔的截面积;F f 为执行油缸活塞杆端部的负载;P 1为执行油缸有杆腔工作压力;P 2为执行油缸无杆腔工作压力;x 为执行油缸活塞杆位移变化量;A 2为执行油缸无杆腔的横截面积;m 为活塞杆上负载的等效当量;b 为活塞杆运行阻尼系数。
执行油缸无杆腔内的流量方程可表示为:采煤机自动调高液压控制系统的优化研究杨东生(长治市煤矿安全技术培训中心,山西长治046000)摘要:针对现有采煤机调高控制系统存在的流量控制不精确、动作滞后性大、实际调高与要求调高差距大的缺点,提出了一种新的自动调高控制系统。
该系统实现了对采煤机滚筒调高的精确控制和稳定微调,降低了系统调整的工作时间,提高了系统性能和响应速度。
关键词:采煤机调高系统优化AMESim 中图分类号:TD355文献标识码:A文章编号:1003-773X (2018)08-0205-03DOI:10.16525/14-1134/th.2018.08.091总第184期2018年第8期机械管理开发MECHANICAL MANAGEMENT ANDDEVELOPMENTTotal 184No.8,2018收稿日期:2018-06-29作者简介:杨东生(1968—),男,本科,毕业于太原理工大学采矿工程专业,中级工程师,从事煤矿安全教育培训工作。
1—油箱;2—油液过滤装置;3—驱动电机;4—液压泵;5—电磁换向阀;6—安全阀;7—执行油缸;8—驱动滚筒;9—摇臂装置;10—电磁溢流阀;11—液压锁;12—溢流阀图1采煤机液压调高系统123456798101112自动化技术与设计Q 1=A 1d x d t +C 1(P 1-P 2)+V 1βe d P 1d t.(2)式中:Q 1为执行油缸有杆腔内的流量;V 1为无杆腔与换向阀间的油液量;C 1为执行油缸的泄露系数;βe 为执行油缸油液的体积弹性模量。
执行油缸有杆腔内的流量方程可表示为:Q 2=A 2d x d t +C 2(P 1-P 2)-C 2P 2+V 2βe d P 2d t.(3)式中:Q 2为执行油缸有杆腔的流量;C 2为执行油缸的泄露系数;V 2为有杆腔与换向阀间的油液量。
对以上公式进行拉氏变换,则求出如下所示的传递函数[2]。
Q (s )=[(bC 1A +A )s +(mC 1A +bL 4βe )s 2]X(s )+(C 1A+L 4βes )F f (s ).(4)式中:A 为执行油缸有杆腔与无杆腔的平均截面积;L 为液压缸活塞杆行程;F f (s )为外力扰动系数;X (s )为内力扰动系数;s 为时间。
根据图1所示采煤机液压调高系统的结构图,可推出采煤机滚筒高度的调节量与液压系统执行油缸活塞杆伸出长度的数学关系模型,表示为[3]:H =L 2sin φ+L 2[sin(2arcsin ΔL 2L 1+φ)-sin φ].(5)式中:ΔL 为执行油缸活塞杆的行程;H 为滚筒高度;L 1为滚筒摇臂的长度;Δφ为执行油缸运行时角度的变化量;L 2为采煤机摇臂的长度。
由此,便建立起了采煤机滚筒高度与采煤机液压控制系统执行油缸活塞杆长度的数学关系模型。
3基于电液比例控制的采煤机调高液压系统的建模在对现有采煤机调高液压控制系统的控制缺点进行分析的基础上,本文用新型的电液比例控制阀代替原有控制系统中的电磁控制阀。
在工作时,首先位移传感器对滚筒的位置进行监测,并将监测结果以电压信号的方式与指定的输入的电压信号进行对比,将电压进行放大后得到控制电压,从而控制成比例的驱动电流,进而调节电液比例阀的节流口打开程度,实现对活塞杆伸出量的调节。
将原始的液压控制系统及改进后的液压控制系统分别导入到AMESim 仿真分析软件中[4],对仿真分析结果进行对比分析,改进后的液压系统仿真原理如图2所示。
4两种液压调高控制系统的仿真分析对比本文分别对优化前的调高控制系统和优化后的调高控制系统进行仿真分析对比。
由图3可知,在输入相同控制信号、相同负载的情况下,控制活塞杆伸出到0.5m 的位置时,优化后的液压控制系统比优化前的液压控制系统能更快地达到目标位置。
由图4可知,在加入相同的负载干扰情况下,优化前的控制系统因采用了电磁换向阀结构,其对液压油流量的控制精确性差,因此在启动初期会产生较大的波动。
优化后的液压系统采用了电液比例控制阀,能够根据电流信号实现对阀口大小的精确调节,因此在启动时相对较为平稳,其平稳性比优化前的系统要提高20%以上。
5结论本文在对采煤机自动调高控制系统缺点进行分析的基础上,提出了一种新的采用电液比例控制阀的采煤机自动调高液压控制系统,通过建立采煤机滚筒高度与液压控制系统活塞杆伸出长度关系的数学模型,并利用AMESim 仿真分析软件对优化前和优化后的液压控制系统对采煤机滚筒高度调节情况进行仿真分析,结果表明优化后的液压系统对执行图2电液比例控制的采煤机液压调高系统原理图图3不同控制系统活塞杆位移曲线对比图4不同控制系统活塞杆速度曲线对比0.10.20.30.40.50.60.0时间/s0.010.020.030.040.050.060.00时间/s电磁阀控制系统电液比例阀控制系统▲第33卷机械管理开发jxglkfbjb@206··信号的响应速度更快,对外在负载变化的适应性更高,抗干扰能力更强,从而确保采煤机在工作中能够平稳、精确、快速地将滚筒抬高到指定的高度。
参考文献[1]程昆鹏,李军霞.管路对液压断带保护装置控制系统特性的影响[J].机床与液压,2015,43(17):50-53.[2]常钰,冯永保.电液比例方向阀控缸速度控制系统的建模与仿真[J].液压气动与密封,2011(8):23-27.[3]代彩彩,刘英林.基于虚拟样机技术的采煤机调高液压系统的仿真[J].机械工程与自动化,2011(2):76-78.[4]江玲玲,张俊俊.基于AMESim 的液压位置伺服系统动态特性仿真[J].机械工程与自动化,2007(1):35-37;40.(编辑:张卓娅)Study on Optimization of Hydraulic Control System for AutomaticHeight Adjustment of ShearerYang Dongsheng(Changzhi Coal Mine Safety Technology Training Center,Changzhi Shanxi 046000)Abstract:In this paper,a new automatic height control system is put forward in view of the shortcomings of the existing height control system of the shearer,including imprecise flow control,large lag in action and wide gap between actual and required height adjustment.The system realizes accurate control and stable fine adjustment of the height of the shearer drum,and reduces the working time of the system adjustment.Improve system performance and response speed.Key words:shearer;height adjustment system;optimization;AMESimStudy on Technical Improvement of Shearer and Scraper Conveyorin Large Inclined Coal SeamMa Qiang(Shuangliu Coal Preparation of Fenxi Coal Industry Co.,Ltd.,Liulin Shanxi 033300)Abstract:Based on the present mining situation of coal face with large dip angle and medium thick coal seam,the application effect of shearer and scraper conveyor in fully mechanized mining practice is analyzed,and some parts of shearer and scraper conveyor which need to be further improved under the condition of large dip angle mining are introduced.It is found that the improvement of shearer and scraper conveyer should not be restricted by the traditional mining idea,and the aim should be to improve the reliability and adaptability of shearer and scraper conveyor under the condition of large inclination angle,and finally put forward reasonable and efficient improvement measures.Key words:large inclination;shearer;scraper conveyor;fully mechanized mining;technical improvement(上接第169页)Design of Supporting Type Selection System for Fully MechanizedMining Face Equipment in Coal MineXin Liang(Xiegou Coal Mine of Jinxing Energy Co.,Ltd.,Lyuliang Shanxi 033602)Abstract:The supporting principles of fully mechanized mining face are briefly described,and the relationship between the hydraulic support,scraper conveyor and the "three machine"of the shearer is analyzed.Finally,the SolidWorks software is used to establish the 3D solid model of the assembly body according to the fully mechanized face.The AutoCAD software and the SolidWorks software can be transferred.It can ensure the complete correlation between 2D engineering drawings and 3D solid models of assemblies.Key words:fully mechanized mining face;three machines;equipment selection;full relevance(上接第21页)杨东生:采煤机自动调高液压控制系统的优化研究2018年第8期207··。