光伏系统最大功率点跟踪实现算法比较研究
光伏发电系统最大功率点跟踪算法研究
பைடு நூலகம்
【 关 键 词 】光 伏 发 电 ;MP P T; 恒 压 法 ; 导 纳 法
1 . 引 言 随 着 社 会 经 济 的 不 断 发 展 , 地 球 上 不
可 再 生 资 源 也 在 不 断 的减 少 ,能 源 枯 竭 阻碍 着 人 类 的 发 展 ,对 此 人 们 在 努 力 地 寻 找 新 能 源 。 太 阳 能 是 理 想 的 新 能源 ,它 取 之 不 尽 、 用之不竭 ,而且作 为清洁 能源无大 气和放射 性 污 染 , 具 有 很 好 的应 用 前 景 。 在 对 太 阳 能 应 用 过 程 中 , 由于 光 伏 电池 的 输 出不 稳 定 , 受 环 境 影 响 很 大 ,输 出 效 率 低 , 因此 对 光 伏 电 池 输 出 最 大 功 率 点 的 跟 踪 显 得 重 要 。 光 伏 电 池 可 以 工 作 在 不 同 的 输 出 电 压 ,但 只 有 在 某 一 输 出 电 压 值 时 , 光 伏 电 池的输 出功率才 能到达最 大功率 点。使光伏 电 池 工 作 在 最 大 功 率 点 ,就 是 最 大 功 率 点 跟
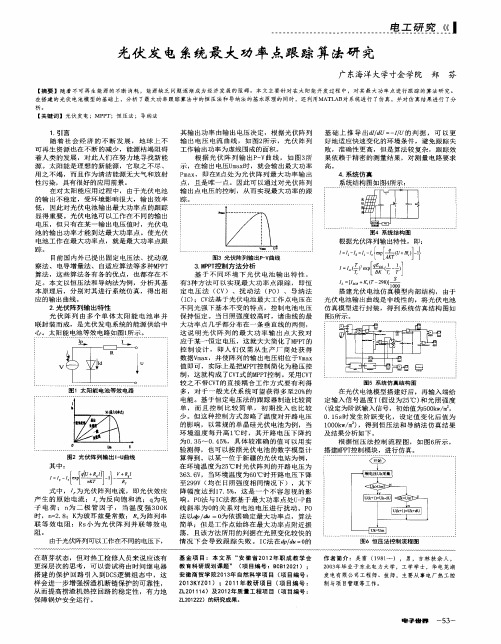
图4 系 统 结 构 图
根 据 光 伏 阵 列 输 出特 性 , 即 :
目前 国 内 外 已提 出 固 定 电压 法 、 扰 动 观 图3光伏阵列输出P - V曲线 察 法 、 电 导 增 量 法 、 自适 应 算 法 等 多 种 M P P T 3 . M P P T 控 制 方 法 分 析 算 法 ,这 些 算 法 各 有 各 的优 点 ,也 都 存 在 不 基 于不 同环 境 下光 伏 电池 输 出特 性 , 足 。本文 以恒压法 和导纳法 为例 ,分析其基 有3 种 方 法 可 以 实 现 最 大 功 率 点 跟 踪 , 即恒 本 原 理 后 , 分 别 对 其 进 行 系 统 仿 真 , 得 出相 定 电 压 法 ( C V) 、扰 动 法 ( P 0 )、 导纳法 应 的输 出 曲 线 。 ( i c ) ;C V 法 基 于 光 伏 电池 最 大 工 作 点 电压 在 2 . 光伏 阵列输出特性 不 同光 强 下 基 本 不 变 的特 点 , 控 制 电池 电压 光 伏 阵 列 由 多 个 单 体 太 阳 能 电 池 串 并 保 持 恒 定 。 当 日照 强 度 较 高 时 , 诸 曲线 的 最 联 封 装 而 成 , 是 光 伏 发 电系 统 的 能 源 供 给 中 大 功 率 点 几 乎 都 分 布 在 一 条 垂 直 线 的 两 侧 , 心 。太 阳 能 电池 等 效 电路 如 图 1 所 示。 这 说 明光伏 阵列 的最 大 功 率输 出 点大 致对 应 于 某 一 恒 定 电压 , 这 就 大 大 简 化 了M P P T 的 控 制 设 计 , 即 人 们 仅 需 从 生 产 厂 商 处 获 得 数据V m a x , 并 使 阵 列 的输 出 电 压 钳 位 于 V m a x 值即可 ,实际上是 把M P P T 控 制 简 化 为 稳 压 控 制 ,这 就 构 成 了C V T 式 的M P P T 控 制 。采 用 C V T 较之不 带C V T 的直接 耦合 工作方 式要 有利得 多 ,对 于 一 般 光 伏 系 统 可 望 获 得 多 至 2 0 % 的 电 能 。基 于 恒 定 电压 法 的 跟 踪 器 制 造 比较 简 单 , 而 且 控 制 比 较 简 单 , 初 期 投 入 也 比较 少 。 但 这 种 控 制 方 式 忽 略 了温 度 对 开 路 电压 的 影 响 , 以 常 规 的单 晶 硅 光 伏 电 池 为 例 , 当 环 境温 度每 升高 l ℃ 时 ,其 开路 电压 下降约 为0 . 3 5 ~0 . 4 5 %,具 体 较 准 确 的 值 可 以 用 实 验 测 得 ,也 可 以按 照 光 伏 电池 的 数 字 模 型 计 算 得 到 。 以某 一 位 于 新 疆 的 光 伏 电 站 为 例 , 在环 境温度为 2 5 ℃ 时 光 伏 阵 列 的开 路 电压 为 3 6 3 . 6 V, 当环 境 温 度 为6 0  ̄ C时 开 路 电 压 下 降 至2 9 9 V( 均 在 日照 强 度 相 同情 况 下 ) ,其 下 降幅度 达到 1 7 . 5 %, 这 是 一 个 不 容 忽 视 的 影 响 。P O 法与 I c 法 都基 于最大 功率 点处U — P 曲 线 斜率 为0 的关系 对 电池 电压进行 扰动 。P O 法 以d p/ d .=o 为 依 据 确 定 最 大 功 率 点 , 算 法 简 单 ; 但 是 工 作 点 始 终 在 最 大 功 率 点 附 近 振 荡 .且 该 方 法 所 用 的判 据 在 光 照 变 化 较 快 的 情 况下 会导 致跟 踪 失败 。I c 法 在d p / d . = o 的
光伏电池最大功率点跟踪方法的研究
光伏电池最大功率点跟踪方法的研究
张国荣 ,项若轩
(教育部光伏系统工程研究中心 ,合肥工业大学 能源研究所 ,安徽 合肥 230009 )
摘 要 : 在光伏发电系统中 ,为了提高光伏电池的利用效率 ,需要对光伏电池的最大功率点进行跟踪 。分析了 在跟踪控制中常见的扰动跟踪法和功率数学模型法 ,比较了它们的优缺点 ,并基于这两种方法提出了一种改进 的跟踪方法 ,利用 MATLAB 对该方法进行了仿真研究 ,仿真结果验证了该方法的有效性 。 关键词 : 光伏系统 ; 光伏电池 ; 最大功率点跟踪 中图分类号 : T M914. 4 文献标识码 : A 文章编号 : 1004 - 3950 (2009) 01 - 0013 - 04
f ( x ) 的逼近函数 。 逼近函数则利用 L agrange 插值
公式求得 。 [ 11 ] L agrange插值公式如下 :
n
ω(X ) =
n
∏( X
i =0 n i =0
- Xi )
( 2)
Pn ( X ) =
∑
i =0
L i ( X ) Yi =
∑ (X
[ 11 ]
ω(X ) Y (Xi ) i - X i )ω′
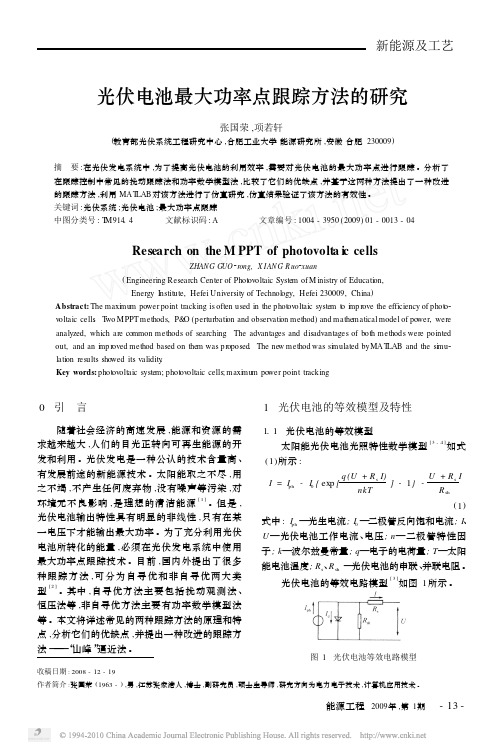
能源工程 2009 年 ,第 1 伏电池的数学模型和电路模型 的分析 ,可以得出光伏电池的输出是一个随光照 条件以及温度等因素变化的复杂量 , 且输出电压 和输出电流存在非线性关系 。 1. 2 光伏电池的输出特性曲线 光伏电池在不同外部条件下的输出曲线 如图 2 所示 : 其中图 2a为同温度 ( T ) 不同日照强 度 ( S ) 时光伏电池的输出 P - U 特性曲线 ; 图 2b 为同日照强度不同温度下光伏电池的输出 P - U 特性曲线 。通过观察可以得出 : 在外部条件变化 时 ,光伏电池输出的最大功率点有很大差异 ,因此 在光伏系统中必须采用最大功率点跟踪技术 。
光伏发电系统中的最大功率追踪算法研究

光伏发电系统中的最大功率追踪算法研究随着全球环境问题的不断加剧和人们对可再生能源的需求不断增长,光伏发电系统得到了广泛的应用。
在光伏发电系统中,最大功率追踪算法是一项重要的技术,它可以实现光伏电池板的最大输出功率,进而提高光伏发电系统的效率。
本文将介绍光伏发电系统中的最大功率追踪算法,并对其研究现状进行分析和讨论。
一、最大功率追踪算法的原理在光伏发电系统中,光伏电池板是获取太阳能并将其转化为电能的核心设备。
然而,光照强度的变化和光伏电池板本身的特性使得其输出电压和电流随时都在变化。
因此,为了提高光伏发电系统的效率,需要实现光伏电池板的最大输出功率追踪。
最大功率追踪算法是通过对光伏电池板输出电压和电流进行测量和监控,进而计算出光伏电池板的输出功率,并实时调整电池板的工作状态,以保证输出功率达到最大。
最常用的最大功率追踪算法包括模拟算法、传统的启发式算法和基于人工智能的算法。
模拟算法是最早被使用的最大功率追踪算法,它根据光伏电池板的电特性建立模型,通过计算机模拟来获取最大功率点。
传统的启发式算法则是通过试错法逐步调整电压和电流,不断接近最大功率点。
基于人工智能的算法则是采用神经网络、遗传算法等技术,通过自学习来找到最大功率点。
二、最大功率追踪算法的研究现状目前,最大功率追踪算法的研究主要集中在以下几个方向:1. 基于模糊控制的最大功率追踪算法基于模糊控制的最大功率追踪算法是利用模糊控制理论来建立光伏电池板最大功率追踪系统的一种方法。
这种方法的优点是具有较强的适应性和鲁棒性,能够在光照变化频繁、天气复杂的环境下实现高效的最大功率追踪。
2. 基于人工智能的最大功率追踪算法基于人工智能的最大功率追踪算法是通过利用神经网络、遗传算法等技术来实现最大功率追踪。
这种方法能够有效地解决光伏电池板的输出功率经常变化的问题,具有自适应性强、稳定性好的优点。
3. 基于无线传感器网络的最大功率追踪算法基于无线传感器网络的最大功率追踪算法是利用物联网技术来实现光伏电池板最大功率追踪的方法。
光伏发电系统最大功率点跟踪算法研究

Ke y wo r d s :p r i ma r y e n e r g y; p h o t o v o l t a i c s y s t e m ; ma x i mu m p o we r p o i n t t r a c k i n g ( MP P T) ; b i n a r y
d uc e t he s y s t e m o s c i l l a t i o n n e a r t he ma xi mu m p ow e r p oi n t a nd i mp r ov e t he o ut pu t e f f i c i e nc y .
摘
要 :提 出新 的光 伏 发 电最 大功 率 点 跟 踪 控 制 算 法 ,从 数 值 分 析 出 发 用 恒 定 电压 法 的原 理 选 取 包 含 最
大 功率 点 的 有效 区 间 ,利 用二 分搜 索 法 不 断 搜 索 最 大 功 率 点 。仿 真 结 果 表 明 此 算 法 动 态 响 应 速 度 快 ,能 准 确 地 跟 踪 光 伏 阵列 的最 大 功 率点 ,减 小 了 在最 大 功 率 点 振 荡 ,提 高 了 输 出 效率 。
i n t e r v a l t o s e a r c h t h e ma x i mu m p o we r p o i nt .The s i mul a t i on r e s ul t s s h ow t he s ys t e m' s r a pi d d y na mi c r e — s p on s e s p e e d a nd s h ow t h a t t h e a l g or i t hm c a n a c c ur a t e l y t r a c k t he ma x i mu m p o we r p oi n t o f PV a r r a y,r e —
光伏发电系统的MPPT控制算法研究

光伏发电系统的MPPT控制算法研究随着可再生能源的重要性日益凸显,太阳能光伏发电系统作为一种清洁、可持续的能源供应方式,受到了广泛关注。
然而,光伏发电系统中存在一个重要的问题,即太阳能电池组的最大功率点(Maximum Power Point,简称MPPT)跟踪控制。
本文将探讨不同的MPPT控制算法,并分析其优缺点。
一、传统的光伏发电系统MPPT控制算法传统的MPPT控制算法主要包括开环控制和闭环控制两种形式。
开环控制算法主要依赖于模糊控制、PID控制和全局搜索等方式,通过调整光伏电池组的电压和电流来实现最大功率点跟踪。
然而,开环控制算法具有很大的局限性,容易受环境变化和外界干扰的影响,难以保持稳定的跟踪效果。
闭环控制算法通过监测光伏电池组的电压和电流,并将其与期望值进行比较,然后调整光伏电池组的工作状态,以实现最大功率点跟踪。
闭环控制算法具有更好的稳定性和鲁棒性,能够适应各种环境条件和外界干扰,但在一些特定情况下可能无法有效跟踪最大功率点。
二、改进的MPPT控制算法为了解决传统MPPT控制算法存在的问题,研究者们提出了许多改进的算法,如模型预测控制算法、人工智能算法和混合算法等。
模型预测控制算法通过建立光伏发电系统的动态数学模型,预测未来一段时间内的光照条件,并根据预测结果调整光伏电池组的工作状态,以实现最大功率点跟踪。
该算法具有较好的响应速度和适应性,但对模型的准确性要求较高,且计算量大。
人工智能算法,如神经网络和遗传算法等,通过训练和优化模型来实现光伏发电系统的MPPT控制。
这些算法具有较强的自学习和优化能力,能够适应光照条件和光伏电池组参数的变化,但其计算复杂度较高,运行速度慢。
混合算法结合了不同的MPPT控制算法,旨在克服各自算法的局限性,提高最大功率点跟踪效果。
例如,将模型预测控制算法和人工智能算法相结合,利用神经网络预测光照条件,然后通过遗传算法优化控制策略,可以提高系统的鲁棒性和精确性。
光伏发电技术中的最大功率点跟踪算法分析与优化

光伏发电技术中的最大功率点跟踪算法分析与优化光伏发电作为一种清洁、可再生的能源形式,在近年来得到了广泛的应用和推广。
然而,由于太阳光照强度的时空变化以及光伏电池的非线性特性,光伏发电系统中存在着一个重要的问题,即如何寻找到最大功率点(MPPT)来提高光伏发电系统的效率和发电量。
因此,光伏发电技术中的最大功率点跟踪算法成为了研究的热点。
最大功率点跟踪算法是光伏发电系统中的核心部分,其作用是通过不断调整光伏电池的工作点,使得光伏发电系统输出功率达到最大值。
目前常用的最大功率点跟踪算法主要有传统的Perturb and Observe算法(P&O算法)、Incremental Conductance算法(INC算法)以及改进的模糊控制算法等。
Perturb and Observe算法是目前应用最广泛的最大功率点跟踪算法之一。
该算法通过不断增加或减小电池电压来观察功率变化的方向,以找到最大功率点。
然而,P&O算法在光伏电池功率曲线出现多个最大功率点或者光照强度变化过快的情况下容易出现震荡现象,导致功率跟踪效果不佳。
Incremental Conductance算法是另一种常用的最大功率点跟踪算法。
该算法通过计算电池电压变化率与电池电流变化率的比值,并与光伏电池的导电率进行比较,来确定功率变化的方向。
INC算法相对于P&O算法来说,能够更准确地找到最大功率点,但仍然存在一定的误差。
除了上述两种传统的最大功率点跟踪算法之外,还有一些新型的改进算法被提出来。
例如,模糊控制算法结合了模糊控制理论和最大功率点跟踪算法,通过模糊控制器来调节光伏电池的工作点,以实现最大功率输出。
模糊控制算法相对于传统算法来说,具有更优的性能和稳定性。
针对这些算法存在的问题,一些研究者提出了一系列的优化方法。
例如,利用人工智能算法如神经网络、遗传算法等来优化最大功率点跟踪算法的调节参数,以提高算法的精确性和效率。
光伏发电系统最大功率点跟踪算法研究及实现
参考内容
摘要
本次演示旨在研究光伏发电系统中最大功率点跟踪算法的问题。通过文献综 述和实验研究,本次演示分析了最大功率点跟踪算法的原理、优缺点及在不同情 况下的性能表现。实验结果表明,采用合适的最大功率点跟踪算法可以有效提高 光伏发电系统的效率。本次演示的研究为优化光伏发电系统的性能提供了有益的 参考。
因此,针对现有方法的不足,本次演示将采用一种改进的扰动观察法来实现 最大功率点跟踪。
方法与算法
本次演示采用改进的扰动观察法来实现光伏发电系统最大功率点跟踪。该方 法通过在扰动电压或电流的基础上,引入一个动态调节因子,以改善系统的响应 速度和跟踪精度。具体实现步骤如下:
1、初始化:设定初始电压或电流值,以及动态调节因子的初始值。
引言
随着环境问题和能源短缺问题的日益严重,可再生能源的开发和利用逐渐成 为人们的焦点。光伏发电作为一种重要的可再生能源,具有清洁、可分散式布局 等优势,但也面临着转换效率低、稳定性差等问题。其中,最大功率点跟踪 (MPPT)算法是提高光伏发电系统效率的关键技术之一。因此,本次演示旨在深 入探讨光伏发电系统中最大功率点跟踪算法的研究。
结果与讨论
实验结果表明,MPPT-PID和MPPT-扰动观察法在电能产量方面表现出色,但 在稳定性方面存在一定欠缺。DC-DC变换器法和MPPT-恒压法在稳定性方面表现良 好,但电能产量相对较低。此外,不同算法在不同环境和光照条件下的性能也存 在差异。例如,在低光照条件下,MPPT-PID和MPPT-扰动观察法的表现较好;而 在高光照条件下,DC-DC变换器法和MPPT-恒压法的表现相对较好。
研究方法
本研究采用实验对比的方法,分别对基于数学模型的MPPT-PID和MPPT-扰动 观察法,以及基于电路理论的DC-DC变换器法和MPPT-恒压法进行实验测试。实验 中,通过调整不同算法的参数,观察其在不同环境和不同光照条件下的性能表现。 同时,为了更准确地评估算法的性能,引入了电能产量和系统稳定性两个评价指 标。
光伏发电系统中的最大功率点跟踪算法研究
光伏发电系统中的最大功率点跟踪算法研究光伏发电系统是一种利用太阳光能直接转换成电能的系统,在可再生能源领域具有广泛的应用前景。
而在光伏发电系统中,最大功率点跟踪算法是一种关键技术,能够实现光伏电池阵列输出功率的最大化。
本文将针对光伏发电系统中的最大功率点跟踪算法进行深入研究,探讨其原理和应用。
首先,我们先来介绍一下光伏发电系统中的最大功率点。
光伏电池的I-V特性曲线中存在一个最大功率点,该点的电流和电压使得光伏电池阵列能够输出最大的功率。
而光伏发电系统中的最大功率点跟踪算法,即MPPT算法,就是通过调节光伏电池阵列的工作状态,使得系统输出功率达到最大化。
目前,常见的最大功率点跟踪算法包括传统的Perturb and Observe(P&O)算法、一种改进的P&O算法和模型预测控制(MPC)算法等。
首先是传统的P&O算法。
该算法通过调节光伏电池阵列的工作电压,使得系统实时功率与前一时刻功率进行比较,根据差值调整电压的增减方向,并逐步趋近于最大功率点。
然而,该算法存在着震荡问题,当环境条件变化较大时,系统可能无法稳定在最大功率点附近。
为解决传统P&O算法的问题,研究人员提出了一种改进的P&O算法。
该算法引入了一种自适应的步长参数,根据当前功率值与前一时刻功率值的比较结果动态调整步长,使得系统更加稳定地跟踪到最大功率点。
改进的P&O算法相比传统P&O算法具有更好的性能,能够在环境条件变化较大的情况下实现更稳定的功率跟踪。
另一种常见的最大功率点跟踪算法是模型预测控制(MPC)算法。
该算法通过建立光伏发电系统的数学模型,利用最优控制策略进行功率跟踪。
MPC算法基于系统模型和预测性能指标,通过迭代计算得到一个最优的控制策略,从而实现最大功率点跟踪。
相比于P&O算法,MPC算法具有更高的精度和稳定性,但是其计算复杂度较高,需要较长的计算时间。
除了传统的P&O算法、改进的P&O算法和MPC算法,还有一些其他的最大功率点跟踪算法在实际应用中得到了研究和应用。
光伏系统最大功率点跟踪算法的研究与实现
光伏系统最大功率点跟踪算法的研究与实现引言随着可再生能源的发展和应用,光伏发电系统逐渐成为清洁能源的重要代表之一、然而,光伏系统的发电效率受到诸多因素的影响,如天气、温度等。
为了最大限度地提高光伏系统的发电效率,研究和实现最大功率点跟踪算法显得尤为重要。
本文旨在探讨光伏系统最大功率点跟踪算法的研究与实现。
一、最大功率点及其重要性最大功率点是指在给定的光照强度和温度条件下,光伏系统能够输出的最大功率的电压和电流点。
最大功率点的确定对于光伏系统的发电效率影响巨大。
1.传统最大功率点跟踪算法传统的最大功率点跟踪算法主要包括蒙特卡洛模拟法、等效电路法和经验公式法等。
这些算法基于数学模型进行功率点的估计,可以取得一定的效果。
但是,由于光伏系统的非线性特性和复杂性,传统算法在实际应用中效果有限。
2.基于模糊控制的最大功率点跟踪算法模糊控制算法是一种基于模糊逻辑的控制策略,可用于光伏系统最大功率点的跟踪。
模糊控制算法利用模糊规则对输入和输出之间的关系进行建模,并通过模糊推理来确定最大功率点。
该算法具有较好的鲁棒性和适应性,能够在复杂的环境下实现最大功率点的跟踪。
二、基于模糊控制的最大功率点跟踪算法的实现1.建立数学模型首先,需要建立光伏系统的数学模型,包括光照、温度、电压和电流之间的关系。
通过测量和采集实际的光伏系统数据,可以利用曲线拟合等方法得到系统的数学模型。
2.设计模糊控制器设计模糊控制器的关键是确定输入变量、输出变量和模糊规则。
输入变量可以选择光照和温度等,输出变量为电压或电流。
根据实际情况,可以确定适当的输入和输出变量,以及相应的模糊规则。
3.实时调整参数模糊控制器的性能受到模糊规则和参数的影响。
通过实时调整参数,可以优化模糊控制器的性能。
常用的参数调整方法包括遗传算法和粒子群算法等。
4.实验验证通过在光伏系统实验平台上搭建实验模型,可以验证最大功率点跟踪算法的性能。
通过调节模糊控制器的参数,比较实际输出功率与理论模型的输出功率,评估算法的有效性。
光伏发电系统及其最大功率点跟踪控制方法比较
光伏发电系统及其最大功率点跟踪控制方法比较光伏发电系统是一种利用光能转化为电能的可再生能源系统,具有环保、可持续等优点。
光伏发电系统中的最大功率点跟踪(MPPT)控制方法是为了获取光伏数组的最大功率输出而采用的一种控制策略。
下面将对光伏发电系统及其最大功率点跟踪控制方法进行比较。
光伏发电系统主要由光伏电池组成,光伏电池可以分为单晶硅、多晶硅和薄膜电池等。
不同类型的光伏电池具有不同的特性,如单晶硅电池具有较高的转换效率,而薄膜电池则具有较低的成本。
因此,在选择光伏电池时需要综合考虑转换效率、成本、可靠性等因素。
光伏发电系统的最大功率点跟踪是为了使光伏数组输出的功率达到最大而进行的控制。
最大功率点的位置取决于光照强度和温度等因素。
最常用的最大功率点跟踪方法有固定步长扫描法、开环观测法、闭环观测法和模糊控制法等。
下面将对这几种方法进行详细介绍和比较。
固定步长扫描法是最简单、最常用的最大功率点跟踪方法之一、该方法通过改变光伏数组输入电压或电流的大小,以固定的步长扫描整个I-V 曲线,然后测量相应的功率输出,找出对应的最大功率点。
这种方法适用于光照条件变化较小时,但在光照条件变化较大时,可能无法准确找到最大功率点。
开环观测法是通过测量光伏电池输出电压和电流,计算功率并比较不同点的功率值,从而确定最大功率点的位置。
该方法需要精确测量电压和电流值,并进行计算,相对比较复杂。
此外,该方法对光照强度和温度的变化较为敏感,需要进行实时调整。
因此,在实际应用中,该方法一般会结合模糊逻辑控制等方法进行优化。
闭环观测法是一种通过反馈控制的方式实现最大功率点跟踪的方法。
该方法通过在光伏数组输出端引入一个反馈环节,将测得的输出功率与期望功率进行比较,并调节输入电压或电流的大小,使得实际输出功率接近期望功率。
闭环观测法具有较好的稳定性和动态响应性能,适用于光伏发电系统在不同光照和温度条件下的最大功率点跟踪。
模糊控制法是一种基于模糊逻辑理论的最大功率点跟踪方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
嚣塑。
苎凰.光伏系统最大功率点跟踪实现算法比较研究黄克亚(南京铁道职业技术学院,江苏苏州215137;苏州大学电子信息学院,江苏苏州215021)【摘要】为使太阳能光伏系统在不同外界条件-l:劈J能工作在最大功率点,以获得足够多的电能,需要对光伏系统的最大功点进行跟踪(M axi m um PowerPointt raci ng简称,M删,本论文主要讨论最大功率点跟踪实现基本原理,典型最大功率点跟踪技术算法。
蚌每—种控制算法均说明其跟踪原理,分讦其优钝占’,并说明其主要应用场所。
鹾盏建词M PPT;恒定电压法;扰动观察法;电导增量法在绿色再生能源得到广泛应用的今天,太阳能因为其j虫持的优势而得到青睐。
但因为光伏电池的输出特性受外界环境因素影响大,而且,光伏电池的光电转换效率低且价格昂贵,光伏发电系统的初期投入较大,为有效利用太阳能,需要对光伏发电系统加以有效的控制。
众所周知,光伏阵列在工作时有一个最大功率点(简称M PP),并且M PP 会随环境的变化而变化。
为了获得最大的输出功率,需要进行最大功率点跟踪。
1M PPT实现原理光伏组件的输出存在着功率最大点,在特定的温度和光照条件下,组件能否工作在最大功率点取决于光伏组件和所带的负载是否相互匹配。
在光伏发电系统中,虽然光伏电池和D C/D C变换电路均为非线性,但在较短时间内,两者均可以看为线性电路。
因此可以把光伏阵列等效看成直流电源,D C/D C变换电路看成外部负载。
调节D C/D C变换电路的等效电阻,—般是指变换器的占空比,使之在不同的外部环境下始终跟随光伏阵列的内阻变化,两者动态负载匹配时就可以获得D C/D C变换器的最大输出功率,实现太阳能电池的M P PT o2M PPT控制的常用算法最大功率点跟踪(M PP n是光伏系统必需具有的功能之一,目前已有多种M P PT控制算法,主要分为非自寻优算法、自寻优算法以及基于智能处理算法,下面将分别讨论各种算法的基本实现原理,并比较优缺点,分析其适用场A o21C V T(cor I st al l t vo kag e t r acki ng)控制算法仔细观察光伏系统P—V关系曲线图,发现在一定的温度下,当日照强度较高时,诸曲线的最大功率点几乎都分布在一条垂直线的两侧,这说明光伏阵列的最大功率输出点大致对应于某—恒定电压,这就大大简化了M PP T的控制设计,即人们仅需从生产厂商处获得数据V。
,并使阵列的输出电压钳位于V。
值即可,实际上是把M PPT控制简化为稳压控制,这就构成了C V T式的M PP T控制。
采用C V T较之不带C、丌的直接耦合工作方式要有利得多,对于一般光伏系统可望获得多至20%的电能。
但这种控制方式忽略了温度对开路电压的影响,特别是在环境温度变化比较大的场合,会产生较大的偏差,从而浪费较大的电能。
C V T控制的优点是:控制简单,易实现,可靠性高;系统不会出现振荡,有很好的稳定性;可以方便地通过硬件实现。
缺点是:控制精度差,特别是对于早晚和四季温度变化剧烈的地区:必须人工干预才能良好运行,更难预料风、沙等影响。
2.2扰动观察法(pert urbat i on&O bs ervat i on p&Q)扰动观察法的原理是在每个控制周期用较小的步长改变太阳能电池阵列的输出,改变的步长是一定的,方向可以是增加也可以是减少,控制对象可以是太阳能电池阵列的输出电压或电流,这—过程称为“扰动4;然后,通过比较干扰周期前后太阳能电池阵列的输出功率,如果输出功率增加,那么继续按照上一周期的方向继续。
干扰”过程,如果检测到输出功率减少,则改变“干扰”的方向。
当扰动达到稳态后,光伏阵列的实际工作点在其最大功率点附近的—个小范围内来回振荡,从而导致部分功率损失:其次,难以选择合适的变化步长,步长过小,跟踪的速度缓慢,太阳能电池阵列可能长时间运行刊氐功率输出区,步长过大,太阳能电池阵列在最大功率点附近的振荡又会加大,跟踪精度下降,从而导致更多的功率损失。
由上可归纳出扰动观察法具有以卜优缺点:1)优点:跟踪方法简单,被测参数少,传感器精度要求不高,从而易于实现:2)缺点:太阳能电池阵列只能在最大功率点附近振荡运行,导致一定的功率损失:跟踪步长对跟B宗精度和跟踪速度无法兼顾;在外部环境突然变化时会出现误判现象。
所以,扰动观察法适合于日照强度变化比较缓慢场合。
23电导增量法由光伏电池的P—U曲线可以看出,在最大功率点处的斜率为零。
通过简单的数学推导好如下:求功率对电压的导数:罢告I+U x善kD口U aU最大功率点右边时有下式成立:{竿<oaU达到最大功率点时有下式成立:—导b一士口U U最大功率点左边时有下式成立:{车>0aU上面推导表明当太阳能电池阵列工作在最大功率点的条件是:输出电导的变化量等于输出电导的负值。
若不相等,则要判断D P/D U大于零还是小于琴,判断其处于最大功率的左边还是右边,然后决定下一步扰动的方向。
电导增量法的优点是:在日照强度发生变化时,太阳能电池阵列输出电压能以平稳的方式追随其变化,而且稳态的电压振荡也较扰动观察法小。
电导增量法的缺点是:太阳能电池阵列可能存在一个局部的最大功率点,这种算法可能导致系统稳定在一个局部的最大功率点,如同扰动观察法—样,增量电导法的变化步长也是固定的。
电导增量法适合用于光强变化快速和缓慢的各种场合,但是它对于控制器硬件要求相对较高,从而导致控制器的成本增加,因而并不适用小功率的光伏发电场合。
24基于数据库的M PPT算法从光伏电池的曲线可以看到,功率P是电压V的单值函数P=f…即每—个光伏电池的电压都对应着—个功率点Po因此,对于任意一条功率曲线,其最大功率点所对应的电压值只有一个。
根据这—特点,可以给光电池在各种状态下的最大功率点对应的电压U。
设定一个数据库,数据库包括阵列光照强良,阵列温度以及与之相对应的最大功率点电压。
系统周期性地检测光伏阵列的状态(温度,光照强度等参数),再到数据库中读取在此状态下的电压值,将此电压值作为目标给定,即可控制系统浏速跟踪到最大功率点。
这种控制算法思路简单,控制也较简单,无需多步逼近最大功率点,而是单步跟踪,所以控制速度较快,可以实现真正的最大功率点跟踪。
但是基—于经验数据的M P P T算法本身也存在如下一些缺陷:比方说所需处理和存储的数据量巨大,增加了系统成本,对光伏阵列中的太阳能电池一致性要求较高,最好使用同一厂家同一型号电碎板,否则,也可能会产生一定的误差。
3基于智能的处理算法目前随着控制技术的发展,还新增添了部分基于智能处理的控制算法。
主要包括模糊控制法、神经网络法等。
模糊控制最大的特点是将专家的经验和知识表示成语言控制规则,再用这些规则去控制系统,模糊控制跟踪迅速,达到最大功率点后基本没有波动,即具有较好的动态和稳态性能。
神经网络法是基于神经网络的M P PT控(下转第210页)缕塑监般磨削加工的表面温度高达500—60a℃,某些情况下甚至达到700l℃以上,在无冷却液刃磨车刀时温度更高,这样就在车刀表面生产了金相组织复杂的变化(即烧伤),车刀表面层的硬度也相应发生了很大的变化,从而直接影响车刀的使用寿命。
图3刃屠区温度与磨粒削点温度车刀刃磨表面的金相组织变化程度与车刀材料,磨削温度,受热时间等因素有关。
就高速钢W侣Cr4V而言,由于以铁碳化物形式存在的W和V溶解温度很高,而未溶的Fe4W2C和V4C3能阻止高温下的奥氏体晶粒长大,因此它的淬火温度高为1270℃一12806(2。
在刃磨时磨削区—般不易达到这个温度,因而刃磨高速钢车刀很难得到淬火组织,这样我1门就不讨论它的淬火组织对车刀寿命的影响。
^’,1【I/}\\/1I-——图4W18Cr4V钢t艘与回火温度的关系当刃磨区温度超过高速钢车刀材料中马氏体转变温度(约250—30a℃),车刀表面原来的马氏体组织转化为回火索氏体、屈氏体等回火组织。
如图4所示为W18C r4V钢硬度与受热;跛的关系,温度在600℃内对车刀硬度无明显的下降,当温度超过60a℃时随温度的升高,硬高显著下降,当温度在70a℃左右时其硬度仅为H R C26—32,使车刀耐磨性大大下降,导致车刀寿命显著缩短。
在不同磨削条件下得到的表面的金相组织不同,在轻刃磨条件下,刃磨温度较低,表面层金相组织回火马氏体有弱化现象,与刃磨时塑性变形产生的加工硬化现象综合作用产生了比基体W18Cr4V硬度稍低的部分,里层由于刃磨时的加工起了主要作用产生了比基体W18C r4V硬度高的部分;中等刃磨条件下,车刀表面刃磨温度达500—600℃时,表面层可得到硬度最高的回火组织而产生了比基体W18C r4V硬度高的部分,里层温度较低可得到弱化的回火组织,硬度逐渐喇氏,再往深处,硬度又逐渐上升直至未受磨削熟影响的基体W18Cr4V:在重刃磨条件下,刃磨温度超过700℃,使表面得到硬度大大降低的回火组织而产生硬度严重不足的W18C r4V部分,里层随受热影响的减小硬度逐渐上升,到温度为570℃左右的位置再往深处,又得到与中等刃磨条件时的组织(如图5所示)。
上述情况中,轻刃磨和中等刃磨条件下刃磨W l8C r4V所产生的硬度变化不大,而目绍织变化层深度为几微米,在车刀切削的初期磨损阶段中就可去除,因此对车刀的影响很小:而在重刃磨条件下,车刀表面得到的回火组织硬度大大刚氏而且组织变化层深度显著加大,使组织变化层进入车刀正常磨损阶段,影响车刀正常磨损阶段的耐用度。
因此在刃磨车刀时磨削力应小些,若是刃磨高速钢车刀时还应经常浸入水中进行冷却。
706560s s504s星40茔35薹30龅袭咖深度(p-)图5刃磨表面的硬度分布3刃磨时产生表面层残余应力车刀刃磨过程中表面层相对基体材料发生形状,体积变化及金相组织变化时在刃磨后车刀表面层将残留有应力,它产生原因主要是:1)刃磨时在磨削力的作用下,刃磨表面层受拉应力产生塑性变形,表面积趋向增大,此时里层处于弹性变形状态。
当磨削力去除后里层趋向复原,但受到已产生塑性变形的表面层的限制,回复不到原状,而产生表面层的压应力,里层则为拉应力。
2)车刀表面层在磨削热的作用下产生热膨胀,此时基体温度较低并未膨胀,因而表面层熟膨胀受基体的限制产生热压缩应力。
当表面层的温度超过材料的弹性变形温度范围时,就会产生热塑性变形(在压应力作用下材料相对缩小)。
刃磨结束后,温度下降至与基体温度一致时,已产生热塑性变形的表面层要收缩,但受到基体的限制产生了残余拉应力,里层则产生了压应力。
3)刃磨时产生的高温引起表面层的相变。
由于不同的金相组织有不同的比重一各种金相组中马Pd*比重最小(p马=7.75)奥氏体比重最大(p奥=796)而珠光体比重为=7.780表面金相变化的结果造成了体积变化。