全部船舶电子性能表
#DF80-8船舶性能表格
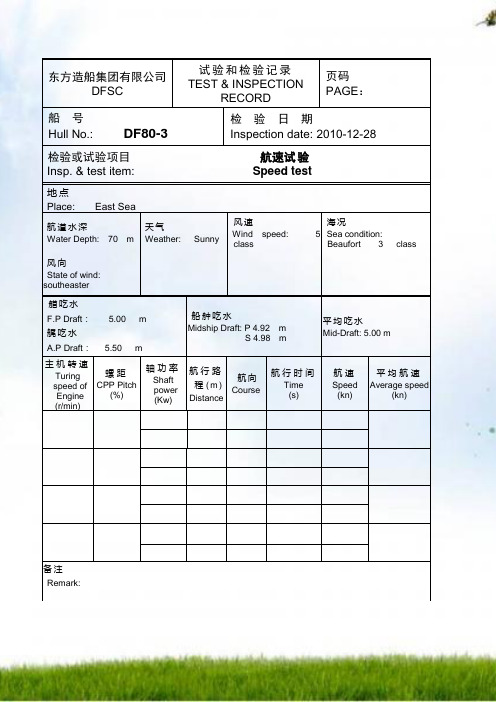
东方造船集团有限公司DFSC试验和检验记录TEST & INSPECTIONRECORD页码PAGE:船号Hull No.: DF80-3检验日期Inspection date: 2010-12-28检验或试验项目航速试验Insp. & test item: Speed test 地点Place: East Sea航道水深Water Depth: 70 m 天气Weather: Sunny风速Wind speed: 5class海况Sea condition:Beaufort 3 class风向State of wind: southeaster艏吃水F.P Draft: 5.00 m 艉吃水A.P Draft: 5.50 m船舯吃水Midship Draft: P 4.92 mS 4.98 m平均吃水Mid-Draft: 5.00 m主机转速Turing speed ofEngine(r/min)螺距CPP Pitch(%)轴功率Shaftpower(Kw)航行路程(m)Distance航向Course航行时间Time(s)航速Speed(kn)平均航速Average speed(kn)备注Remark:检验员:Shipyard surveyor:GL验船师GL Surveyor:船东代表Owner Representative:东方造船集团有限公司DFSC试验和检验记录TEST & INSPECTION RECORD页码PAGE:船号Hull No.: DF80-8检验日期Inspection date: 2010-12-29检验或试验项目紧急停车Insp. & test item: crash stop test地点洞头海域Place: DongTou Sea area航道水深Water Depth: 60 m 天气Weather: Sunny风速Wind speed: 3 m/s海况Sea condition:Beaufort 3 class艏吃水F.P Draft: 5.00 m 艉吃水A.P Draft: 5.50 m船舯吃水Midship Draft: P 4.92 mS 4.98 m平均吃水Mid-Draft: 5.00 m试验内容Test item 初始航速Initialspeed(knots)初始航向Initialheading(deg)结束航速Stopspeed(knot)倒车开始Asternstart全速倒车Fullastern船停止Stop航向偏转Deviation ofheading(deg)距离Distance(m)紧急停车试验Crash stop testFullSpeed12.8 350 0.99 9:21:10 9:22:25 9:24:05 81°749HalfSpeed10.2 290 0.96 9:07:56 9:09:01 9:11:29 84°597备注Remark:检验员:Shipyard surveyor: GL验船师GL Surveyor:船东代表Owner Representative:东方造船集团有限公司DFSC试验和检验记录TEST & INSPECTION RECORD页码PAGE:船号Hull No.: DF80-8检验日期Inspection date: 2010-12-29检验或试验项目惯性试验Insp. & test item: Inertia test地点洞头海域Place: DongTou Sea area航道水深Water Depth: 60 m 天气Weather: Sunny风速Wind speed: 3 m/s海况Sea condition:Beaufort 3 class艏吃水F.P Draft: 5.00 m 艉吃水A.P Draft: 5.50 m船舯吃水Midship Draft: P 4.92 mS 4.98 m平均吃水Mid-Draft: 5.00 m试验内容Test item 初始航向InitialHeading(deg)初始航速InitialSpeed(knot)结束航向StopHeading(deg)结束航速StopSpeed(knot)航向偏转Deviation ofHeading(deg)距离Distance(m)时间Time(s)惯性停车试验Inertia stop test半速HalfSpeed320°9.7 35° 3.96 75°521 151全速ServiceSpeed245°14.0 357° 3.98 112°803 180备注Remark:检验员:Shipyard surveyor: GL验船师GL Surveyor:船东代表Owner Representative:东方造船集团有限公司DFSC试验和检验记录TEST & INSPECTION RECORD页码PAGE:船号Hull No.: DF80-8 检验日期Inspection date: 2010-12-29检验或试验项目航向稳定性试验Insp. & test item: Heading stability test地点洞头海域Place: DongTou Sea area航道水深Water Depth: 60 m 天气Weather: Sunny风速Wind speed: 3m/s海况Sea condition:3 class艏吃水F.P Draft: 5.00 m 艉吃水A.P Draft: 5.50 m船舯吃水Midship Draft: P 4.92 mS 4.98 m平均吃水Mid-Draft: 5.00 m主机转速Main engine turning speed: 750 rpm(Initial speed is 12.98/13.24 knots ) 初始航向Initial heading: see ”0” line水流横流current: crosscurrent时间T i m e(S)0306090 120150180210240270300航向H e a d i n ga n g l e(d e g)73.8 74.2 74.3 74.5 74.4 74.3 74.6 74.6 74.7 74.5 74.3时间T i m e(S)0 306090 120150180210240270300航向H e a d i n ga n g l e(d e g)245.3244.7244.3 244.1 244.5 244.2 244.6 244.7 244.9 244.6 244.9备注Remark:检验员:Shipyard surveyor:GL验船师GL Surveyor:船东代表Owner Representative:东方造船集团有限公司DFSC试验和检验记录TEST & INSPECTION RECORD页码PAGE:船号Hull No.: DF80-8 检验日期Inspection date: 2010-12-29检验或试验项目回转试验Insp. & test item: Turning circle test地点洞头海域Place: DongTou Sea area航道水深Water Depth: 60 m 天气Weather: Sunny风速Wind speed: 3 m/s海况Sea condition:Beaufort 3 class艏吃水F.P Draft: 5.00 m 艉吃水A.P Draft: 5.50 m船舯吃水Midship Draft: P 4.92 mS 4.98 m平均吃水Mid-Draft: 5.00 m初始航速(左)12.3 Initial Speed(P):knots 初始航向Initial heading:270°结束航速(左) 4.5Final Speed(P):knots初始航速(右)12.2 Initial Speed(S):knots 初始航向Initial heading: 270°结束航速(右) 4.9Final Speed(S):knots转舵方向(满舵)Steering dir. (full rudder) 左35oP 35o右35oS 35o最大横倾角度Max. heeling angle8 8回转角度Turning circle angle 回转时间Time回转时间Time90 66 62 180 125 129 360 273 272540 424 429稳定回转直径Dia. of turning circle D (m)197228检验员:Shipyard surveyor:GL验船师GL Surveyor:船东代表Owner Representative:东方造船集团有限公司DFSC试验和检验记录TEST & INSPECTIONRECORD页码PAGE:船号Hull No.: DF80-8检验日期Inspection date: 2010-12-29检验或试验项目威廉姆斯试验Insp. & test item: Williamson Turn test 地点Place: East Sea航道水深Water Depth: 70 m 天气Weather: Sunny风速Wind speed: 3 m/s海况Sea condition:Beaufort 3 class风向State of wind:southeaster 初始航向Initial heading: 153°水流方向State of sea: °初始航速(右)Initial Speed(S):13.7knots 结束航向Final heading: 333°结束航速(右)Final Speed(S):9.5knots艏吃水F.P Draft: 5.00 m 艉吃水A.P Draft: 5.50 m船舯吃水Midship Draft: P 4.92 mS 4.98 m平均吃水Mid-Draft: 5.00 m满舵开始Rudder start:08:14:57 回到原点时间Return Time:444S回转直径:Return Dia.:316m 返回距离Return Dis.:42m备注Remark:检验员:Shipyard surveyor:GL验船师GL Surveyor:船东代表Owner Representative:东方造船集团有限公司DFSC试验和检验记录TEST & INSPECTION RECORD页码PAGE:船号Hull No.: DF80-8检验日期Inspection date: 2010-12-29检验或试验项目Z-操纵试验Insp. & test item: Z-manoeuvre test 地点洞头海域Place: DongTou Sea area航道水深Water Depth: 65 m 天气Weather: Sunny风速Wind speed: 3 m/s海况Sea condition:Beaufort 3 class艏吃水F.P Draft: 5.00 m 艉吃水A.P Draft: 5.50 m船舯吃水Midship Draft: P 4.92 mS 4.98 m平均吃水Mid-Draft: 5.00 m only one pump for this testing报验者Test Personal:服务工程师Service Engineer:GL验船师GL Surveyor:船东代表Owner Representative:东方造船集团有限公司DFSC试验和检验记录TEST & INSPECTION RECORD页码PAGE:船号Hull No.: DF80-8检验日期Inspection date: 2010-12-28检验或试验项目锚装置航行试验记录Insp. & test item:Sea Trail Record for Anchoring Test 地点Place: East Sea水深Water Depth: 85 m 天气Weather: Sunny风速Wind speed: 3 m/s海况Sea condition: 3 class艏吃水F.P Draft: 5.00 m 艉吃水A.P Draft: 5.50 m船舯吃水Midship Draft: P 4.92 mS 4.98 m平均吃水Mid-Draft: 5.00 m测试项目Test item左锚Port anchor右锚Stbd. anchor起每节锚链时间Time for raise anchor shackle (s)3-2: 1562-1: 1563-2: 1582-1: 157平均起锚速度Mean hoisting velocity (m/min)10.57 10.47 泵压Pump pressure (bar)130 130 电压Voltage (V)440 440电流Current (A) 工作状态Work condition36.6 35.8 破土时Leavinganchor from ground42.6 41.7绝缘Insulation after testing(MΩ)200 200 备注:Remark:检验员:Shipyard surveyor:GL验船师GL Surveyor:船东代表Ow ner’sRepresentative:东方造船集团有限公司DFSC 试验和检验记录TEST & INSPECTION RECORD页码PAGE:船号Hull No.: DF80-8检验日期Inspection date: 2010-12-29检验或试验项目操舵试验记录Insp. & test item:Record for Steering Test地点洞头海域Place: DongTou Sea area 风速:Wind velocity: 3 m/s海况:Sea Condition: 3 class艏吃水F.P Draft: 5.00 m 艉吃水A.P Draft: 5.50 m船舯吃水Midship Draft: P 4.92 mS 4.98 m平均吃水Mid-Draft: 5.00 m船速:Ship speed: 13.2 Kn. 主机工况ME condition: 750 r/s水深:Water Depth: 60 mSteering test操舵角Steering Angle 右35︒→左30︒S 35︒→P 30︒左35︒→右30︒P 35︒→S 30︒转舵时间Time of turning(s)泵号Pump No.1 17 222 20 24Both 9 10工作压力Working pressure(bar)泵号Pump No.1 80 1002 140 100Both 80 90电流Current (A)泵号Pump No.1 8.7 8.42 8.5 8.5Both 8.5 8.5Emergency steering操舵角Steering Angle 左15︒→右15︒P 15︒→S 15︒右15︒→左15︒S 15︒→P 15︒转舵时间Time of turning rudder (s)泵号Pump No.1 10 82 11 10工作压力Working pressure (bar)泵号Pump No.1 40 402 45 40电流Current (A)泵号Pump No.1 9.4 9.42 9.3 9.2检验员:Shipyard surveyor: GL验船师GL Surveyor:船东代表Owner’s Representative:东方造船集团有限公司DFSC试验和检验记录TEST & INSPECTION第页PAGE船号Hull No. : DF80-8检验日期Inspection date: 2010-12-28检验或试验项目噪声测试Insp. & test item: Measurement of noise 测量单位Measuring unit: dB(A)序号部位区域Area实测值measured value序号部位区域Area实测值measured value1 Wheelhouse 64 4 Ship's Office 552 Bridge Wing (P&S) P: 75 5 OFF. MESS 57 S: 74.5 6 CREW MESS 603 Private Rooms: 7 Galley 64CAPTAIN/B.R 50/54 8 DISPENSARY 60 PILOT 51 9 ENGINE CONTROL ROOM 68 OWNER/B.R 52/54 10 ER. WORKSHOP 76 CHIEF ENGINEER/B.R 54/50 9 FITNESS ROOM 64 2/ENGINEER(0606) 52 10 STEERING GEAR ROOM 82 CHIEF OFFICER/B.R 54/53 11 ER.ROOM 991 Crew (0503) 53 12 LAUNDRY(0210) 701 Crew (0505) 552/OFFICER(0507) 551 Crew (0509) 541 Crew (0511) 531 Crew (0403) 551 Crew (0404) 541 Crew (0405) 55检验员Surveyor:GL验船师GL Surveyor:船东代表Owner’s Representative:东方造船集团有限公司DFSC 试验和检验记录TEST & INSPECTION第页PAGE船号Hull No. : DF80-8检验日期Inspection date: 2010-12-28检验或试验项目振动测试Insp. & test item: Vibration measurement 测量单位Measuring unit: HZ mm/s序号部位区域Area单位Unit: HZ mm/s序号部位区域Area单位Unit: HZ mm/s1 Wheelhouse驾驶室 1.3 23 ECR 1.82 3 Bridge Wing (P&S)桥楼两翼P: 1.4 24 Engine Workshop 1.8S: 1.9 25 FITNESS ROOM 2.64 CAPTAIN/B.R 0.8 26 Steering Gear RM舵机房 2.15 OWNER/B.R 1.0 27 Engine Room:fore 2.06 CHIEF ENGINEER 1.0 28 Engine Room:aft 3.07 2/ENGINEER(0606) 1.3 29 CHIEF ENGINEER/B.R 1.28 CHIEF OFFICER/B.R 1.4 30 DISPENSARY(0303) 1.99 PILOT 1.4 37 LAUNDEY(0210) 1.310 1 Crew (0503) 0.9 38 主机座 1.311 1 Crew (0505) 0.8 3912 1 Crew (0507) 0.8 4013 1 Crew (0509) 0.9 4114 1 Crew (0511) 0.9 4215 1 Crew (0403) 1.2 4316 1 Crew (0404) 1.1 4417 1 Crew (0405) 0.7 4518 Ship’s office (0409) 1.0 4619 0312 1.4 4720 0313 1.5 4821 Galley 1.2 4922 DISPENSARY 1.9 52检验员Surveyor: GL验船师GL Surveyor:船东代表Owner’s Representative:扭振测量报告Result of Torsion Virbration一、船名_________________________________ 制造厂___________________________Ship name Manufactory测试单位及人员______________________________________________________________Test department and personnel测试时间_____________________________ 地点_____________________________ Test time Place测试目的____________________________________________________________________ Test intent测量仪器_____________________________ 仪器放大比例_____________________ Measure apparatus Zoom in scale of the apparatus二、测点布置简图:Test point arrangement diagram:三、测试记录分析及结果(见下页):Test record analyzing and result(To the next page):四、轴系扭振应力(扭矩)- 转速及许用值曲线:Shafting torque stress-rev and allowance value curve五、典型实测记录图(波形或者幅值谱):Representative actual record diagram (waveform or amplitude value diagram)六、结论:Conclusion:试验员______________ 检验员______________Tester: Checker:船东________________ 验船师______________Ship-owner: GL Surveyor:东方造船集团有限公司DFSC试验和检验记录TEST & INSPECTION RECORD第页PAGE船号Hull No.: DF80-8检验日期Inspection date:检验或试验项目航行试验-消防效用试验记录Insp. & test item:Sea Trail Record for Fire Pump Test 地点Place:航道水深Water Depth: m 天气Weather: Raining风速Wind speed: m/s海况Sea condition:Beaufort 5 class艏吃水F.P Draft: 5.00 m 艉吃水船舯吃水Midship Draft: P 4.92 mS 4.98 m平均吃水Mid-Draft: 5.00 m测试项目Test item消防泵出口压力fire pump outlet pressurue (MPa)主机海水泵出口压力M/A sea water pump outlet pressure(MPa)消防泵工作电流Current of fire pump (A)绝缘Insulation (MΩ)备注Remark:报验者Test Personal:GL 验船师GL Surveyor:船东代表Owner’sRepresentative:东方造船集团有限公司DFSC试验和检验记录TEST & INSPECTION RECORD页码PAGE:船号Hull No.: DF80-8检验日期Inspection date:检验或试验项目艏侧推航行试验Insp. & test item: Bow thruster sea trial test 地点洞头海域Place: DongTou Sea area航道水深WaterDepth: m 天气Weather: Cloudy风向Wind direction:风速Wind speed: m/s海况Sea condition:Beaufort 5 class艏吃水F.P Draft: 5.00 m 艉吃水A.P Draft: 5.50 m船舯吃水Midship Draft: P 4.92 mS 4.98 m平均吃水Mid-Draft: 5.00 m左->右P->S转动角度T. Degree10︒20︒30︒40︒50︒60︒70︒80︒90︒压力Pressure(Mpa)时间Time(s)转速T.Speed右->左S->P转动角度T. Degree压力Pressure(Mpa)时间Time(s)转速T. SpeedT. Degree= Turning Degree(︒); T. Speed=Turning speed(rpm)检验员:Shipyard surveyor: GL验船师GL Surveyor:船东代表Owner Representative: 航行试验记录SEA TRIAL RECORD 1.航速试验Speed test2.紧急停车crash stop test3. 惯性试验Inertia test4. 锚装置航行试验记录Sea Trail Record for Anchoring Test 5. 操舵试验记录Record for Steering Test6. 噪声测试Measurement of noise7. 消防效用试验记录Fire Pump Test。
船舶电子设备的故障诊断与恢复策略

船舶电子设备的故障诊断与恢复策略在当今的航运领域,船舶电子设备的重要性日益凸显。
从导航系统到通信设备,从动力控制系统到安全监测装置,这些电子设备的正常运行对于船舶的安全航行、高效运营以及船员的生命安全都起着至关重要的作用。
然而,由于船舶工作环境的复杂性和恶劣性,电子设备不可避免地会出现各种故障。
因此,掌握有效的故障诊断与恢复策略成为了船舶运营管理中的关键环节。
一、船舶电子设备常见故障类型船舶电子设备的故障类型多种多样,大致可以分为硬件故障和软件故障两大类。
硬件故障通常表现为电子元件的损坏、线路的断路或短路、连接器的松动等。
例如,船舶导航系统中的 GPS 接收器可能会因为受到强烈的电磁干扰而出现信号丢失的问题;动力控制系统中的传感器可能会由于长期的振动和高温环境而失效,导致无法准确监测设备的运行参数。
软件故障则主要包括程序错误、系统崩溃、病毒感染等。
比如,船舶通信系统中的软件可能会因为版本不兼容或者漏洞而出现通信中断的情况;船舶自动化控制系统中的程序可能会由于错误的逻辑设置而导致设备误操作。
二、故障诊断的方法与技术(一)直观检查法直观检查法是最基本也是最直接的故障诊断方法。
维修人员通过观察设备的外观、指示灯的状态、闻设备是否有异味、听设备是否有异常声音等方式,初步判断设备是否存在故障。
例如,如果发现设备外壳有明显的烧焦痕迹,或者闻到刺鼻的焦糊味,很可能是设备内部发生了短路故障。
(二)仪器检测法当直观检查法无法确定故障原因时,就需要借助专业的仪器进行检测。
常用的检测仪器包括示波器、万用表、频谱分析仪等。
示波器可以用来检测电信号的波形和幅度,帮助判断电路是否正常工作;万用表可以测量电压、电流、电阻等参数,确定电路中的元件是否损坏;频谱分析仪则可以分析信号的频谱特性,用于诊断通信设备中的故障。
(三)替换法替换法是一种简单有效的故障诊断方法。
当怀疑某个元件或部件出现故障时,可以用一个已知正常的元件或部件进行替换,如果设备恢复正常工作,那么就可以确定被替换的元件或部件存在故障。
150T轮船起重(全配重)起重性能表

150T轮船起重(全配重)起重性能表
载重量(T) 工作半径
(m)
主钩起升
速度
(m/min)
主钩最大
速度
(m/min)
辅钩起升
速度
(m/min)
辅钩最大
速度
(m/min)
150 5 15 25 20 30
150 10 7.5 15 15 20
150 15 3.3 6.5 10 13
150 20 2.3 4.5 8 10
150 25 1.8 3.5 7 8.5 该文档列出了150T轮船起重(全配重)的起重性能表,包含不同载重量和工作半径下的主钩和辅钩的起升速度和最大速度。
该信息可以用于评估船舶起重设备的效能和灵活性。
请注意,以上数据仅供参考,具体的起重性能可能会受到其他因素的影响,例如工作条件、气候环境等。
在实际使用前,建议根据具体情况进行详细测试和评估。
如需了解更多关于150T轮船起重(全配重)的起重性能和技术规格,请参阅相关文件或咨询专业人士。
电子海图系统(ECS)功能、性能和测试要求(暂行)

国内航行船舶船载电子海图系统(ECS)功能、性能和测试要求(暂行)Electronic chart system (ECS)-Operational,performance and test requirements海船舶[2010]74号1 范围本要求规定了ECS的最低性能标准和测试要求。
ECS可作为中国国内航行船舶的主要导航手段。
当ECS作为主要的导航手段时,为确保ECS失效时的航行安全,船舶应有足够的后备布置。
ECS分类如下:•“A”类ECS,可作为国内航行船舶的主要导航手段,也可作为ECDIS设备的后备布置,但需符合 MSC.232(82)附录6和IEC 61174(见附录B)的要求。
•“B”类ECS,可用于未要求配备“A”类ECS的国内航行船舶,并可作为其导航手段。
•“C”类型ECS,适用于辅助导航,用于船位标绘和监视。
在每项要求的开始处对三种类型ECS的适用性进行了标示。
标记“(A、B、C)”的要求适合所有类型;标记“(A、B)”或“(B、C)”的仅适合其标记括号中的类型;标记“(A)”、“(B)”或“(C)”的仅适合于括号内的单一类型。
测试指南见附录A。
2 规范性引用文件下列文件中的条款通过本要求的引用而成为本要求的条款。
凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本要求,然而,鼓励根据本要求达成协议的各方研究是否可使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本要求。
IEC 60945 海上导航和无线电通信设备及系统—通用要求—测试方法和要求的测试结果IEC 61162-1 海上导航和无线电通信设备及系统-数字接口-第1部分:单发和多收IEC 61162-2 海上导航和无线电通信设备及系统-数字接口-第2部分:高速率单发和多收IEC 61162-3 海上导航和无线电通信设备及系统-数字接口-第3部分:串行数据设备网络IEC 61174 海上导航和无线电通信设备及系统—电子海图显示和信息系统—工作和性能要求、测试方法和要求的测试结果IEC 61993-2 海上导航和无线电通信设备及系统—自动识别系统(AIS) —第二部分:通用自动识别系统(AIS)A类船载设备—工作和性能要求、测试方法和要求的测试结果IEC 62287-1 海上导航和无线电通信设备及系统— B级船载自动识别系统(AIS)- 第一部分:载波侦听时分多址技术(CSTCDMA)IEC 62288 海上导航和无线电通信设备及系统—船载导航显示导航相关信息的表示—通用要求、测试方法和要求的测试结果IEC 62388 海上导航和无线电通信设备和系统-船载雷达-性能要求-测试方法和要求的测试结果IMO MSC.232(82)-2006 电子海图显示和信息系统(ECDIS)性能标准IHO S-52ECDIS 海图内容和显示特性技术要求IHO S-52附录2 ECDIS的颜色和符号规范IHO S-52附录2 附件A IHO ECDIS表示库IHO S-57IHO 数字航道测量数据传输标准IHO S-60 WGS84坐标变换用户手册IHO S-61 光栅航海图产品规范IHO S-63 IHO 数据保护方案ISO 19379 船舶和航海技术-ECS数据库-内容、质量、更新和测试。
浙江海洋学院船舶静水力性能及稳性计算
课程设计成果说明书题目:船舶静水力性能及稳性计算学生姓名:学号:学院:船舶与建筑工程学院班级:指导教师:浙江海洋学院教务处2012年 12月 25 日浙江海洋学院课程设计成绩评定表2012 —2013学年第一学期《船舶静力学》课程设计指导书一、设计目的《船舶静力学》是船舶与海洋工程专业的一门重要专业课,在课程中学习船体几何形体的表达方法;学习船舶安全漂浮水面保持一定稳性和浮态的基本原理和计算方法以及抗沉性能的研究。
根据教学大纲要求的重点内容,本课程设计包括两方面内容★:一是运用所学基本方法和知识完成某一条船的静水力性能计算并绘制出静水力曲线图,使学生在了解和掌握基本原理的前提下实践计算流程;二是采用变排水量法计算并完成某一条船的静、动稳性曲线绘制。
通过该课程设计环节达到对课程重点内容的消化和吸收,提高学生的工程技术素养,为后续课程学习和今后从事船舶设计、建造和开发等科研工作打下结实的理论基础。
注★:第一部分内容大部分学生完成,第二部分内容指定学生完成。
1班10,2班12二、内容1、静水力性能计算。
依据提供的船型图纸资料,完成以下设计任务:选取合适方法计算并绘制浮性和稳性曲线包括:(1) 型排水体积曲线(2) 排水量曲线(3) 浮心纵向坐标x B曲线(4) 浮心垂向坐标z B(或KB)曲线(5) 水线面面积Aw曲线(6) 漂心纵向坐标x F曲线(7) 每厘米吃水吨数TPC曲线(8) 横稳心半径BM曲线(9) 纵稳心半径BM L曲线(10) 每厘米纵倾力矩MTC曲线(11) 水线面系数C wP曲线(12) 中横剖面系数C M曲线(13) 方形系数C B曲线(14) 棱形系数C P曲线2、依据提供的船型图纸资料,完成以下设计任务:采用变排水量计算法计算并绘制设计排水量时对应的静、动稳性曲线,计算后得出稳性衡准数K值。
三、要求1.静水力性能采用excel 电子表格计算,静水力曲线图用AUTOCAD在计算机上完成。
MSC192(79) 雷达新性能标准(中文)
海安会MSC.192(79)决议(2004年12月6日通过)通过经修订的雷达设备性能标准海上安全委员会,忆及国际海事组织公约第28(b)条关于本委员会的职能,还忆及A.886(21)决议,大会决定应由海上安全委员会代表本组织履行通过性能标准和技术规则及其修正案的职能,注意到A.222(VII)决议、A.278(VIII)决议、A.477(VII)决议、MSC.64(67)决议附件4、A.820(19)决议和 A.823(19)决议包括适用于现在正在生产以及在过去不同时间段安装的船用雷达的性能标准,还注意到船用雷达是与船上要求配备的其他导航设备(例如自动目标跟踪设备、ARPA、AIS、ECDIS和其他)一起使用的,认识到需要在总体上统一船用雷达的标准,尤其是与航行相关信息图像显示的标准,审议了航行安全分委会在其第50次会议上提出的经修订的雷达设备性能标准建议案,1.通过经修订的雷达设备性能标准建议案,其文本载于本决议附件中;2.建议各国政府确保2008年7月1日或以后安装的雷达设备符合不低于本决议附件中所规定的性能标准。
第461页附 件经修订的雷达设备性能标准建议案目 录1 设备范围2 标准的适用范围3 参考资料4 定义5 雷达系统的操作要求6 人–机工程学衡准7 设计和安装8 界面9 备份和后备装置第462页1 设备范围通过指示与本船相关的其他水面船只、障碍物和危险物、航行目标和海岸线的位置,雷达设备应能有助于安全航行和避免碰撞。
为此,雷达应综合并显示雷达图像、目标跟踪信息,源自本船位置的位置数据(EPFS)以及地理参照数据。
应提供AIS信息的综合和显示以补充雷达信息。
可提供显示电子导航海图所选部分和其他矢量海图信息的功能以协助航行和监控位置。
如果符合以下功能要求,雷达及其他传感器或报告信息(例如AIS)应能通过协助船舶有效航行和保护环境,提高船舶的航行安全:- 沿岸航行和进港时,清晰显示陆地和其他固定危险物;- 作为提供更清晰的航行图像和增强对现场情况的意识的方法;- 以船对船模式协助避免发现和报告的危险物碰撞;- 发现小型漂浮和固定危险物时,避免碰撞并确保自身船舶安全;和- 发现漂浮和固定导航装置(见表2,注3)。
电子海图系统(ECS)操作和性能要求、测试方法和要求的结果
电子海图系统(ECS)性能和测试要求(征求意见稿)目录1范围ﻩ错误!未定义书签。
2规范性引用文件ﻩ错误!未定义书签。
3术语和定义......................................................... 错误!未定义书签。
3.1ﻩ错误!未定义书签。
3.2.................................................................... 错误!未定义书签。
3.3ﻩ错误!未定义书签。
3.4ﻩ错误!未定义书签。
3.5................................................................. 错误!未定义书签。
3.6ﻩ错误!未定义书签。
3.7 (2)3.8ﻩ错误!未定义书签。
3.9ﻩ错误!未定义书签。
3.10.................................................................. 错误!未定义书签。
3.11ﻩ错误!未定义书签。
3.12................................................................. 错误!未定义书签。
3.13............................................................... 错误!未定义书签。
3.14ﻩ错误!未定义书签。
3.15................................................................... 错误!未定义书签。
3.16................................................................... 错误!未定义书签。
3.17................................................................... 错误!未定义书签。
我国ECS功能,性能、测试要求
4.我国关于船载电子海图系统的功能、性能和测试要求
《国内航行船舶船载电子海图系统和自动识别系统设备管理规定》中规定中 国海事局负责船载电子海图系统的统一管理、类型认可(也称型式认可) 和产 品检验管理。各地诲事管理机构负责对船舶配备船载电子海图系统实施监督 检查。各船检机构负责设备配备及安装情况的检验。中国籍国内航行船舶配 备的船载电子海图系统设备应符合《国内航行船舶船载电子海图系统(ECS)功 能、性能和测试要求( 暂行) 》中的A 级设备要求。
4.我国关于船载电子海图系统的功能、性能和测试要求
该要求将ECS 分为A、B、C 三类,其中“A”类ECS 可作为国内航 行船舶的主要导航手段,也可作为ECDIS 设备的备用装置,但需符合 MSC. 232(82) 附录6 和IEC 61174 的要求;“B”类ECS 可用于未要求 配备“A”类ECS 的国内航行船舶,并可作为其导航手段;“C”类型 ECS 适用于辅助导航,用于船位标绘和监视。对三类ECS 的最低性能标 准和测试要求分别作了详细规定,规定了电子导航的一般要求及导航显 示器上导航相关信息的显示,规定了ECS 工作和性能要求,包括海图信 息、位置监视、航线设计、航行监视、航行记录、计算和精度、接口。 该要求有四个附录,如下:
4.我国关于船载电子海图系统的功能、性能和测试要求
中国交通部海事局在参考相关国际标准的基础上,于2010 、性能和测试要求 (暂行)》,规定了船载电子海图系统(ECS) 的功能、性能技术要求、 相应的试验方法和要求的检验结果。
该要求指出,ECS 可作为中国国内航行船舶的主要导航手段。当 ECS 作为主要的导航手段时,为确保ECS 失效时的航行安全,船舶应 作出足够的备用装置。
4.我国关于船载电子海图系统的功能、性能和测试要求
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
液压驱动×2 500KN
0-20RPM 56MM
液压驱动×2 500KN
0-20RPM 52MM
液压驱动×2 450KN 0-12RPM 44MM
液压驱动×2 100KN 0-20RPM 24MM
原动机功率
钢桩直径
钢 桩
钢桩长度
钢桩重量
1600MM 45M 65T
液压缸数 推力 压力
2/桩 1500KN
船用组装 型号: CJKR-93 式空调器 江苏兆胜空调有限公司
生活污水 型号: WCX-36 处理装置 江苏南极机械有限责任公司
横移锚(Flipper Delta锚 ) 锚
7T(3个,其中一只备用)
艉锚(短杆霍尔锚) 3.3T(1个)
附注
2008.3.28 12396kw 约1.5亿
非自航
927.73m³ 242.16m³
泰豪科技 800kw×1500rpm
400Vx1443A 50HZ
380C淡水冷却 MP-H-300-4×1
泰豪科技 300kw×1500rpm
400Vx541A 无刷自励 2台 1台 W 2台
台
天鸥1#/天虎2#
总吨位 净吨位 船 总长 柱间长
2861 858 108m 86.1m
船类
绞吸式挖泥船
航区
沿海施工近海调遣
建造厂 南通港闸船舶制造有限公司
满载吃 平均
水
船艉
3.7M 3.7M
平均 空载吃水
船艉
2.632M 3.022M
出厂日
装期机功
率
造价
自
航速
航 拖 航 施
工 续航力
2008.3.28 12396kw 约1.5亿
1#舱内泵封水泵:HDS-100MA-C55*2 n=2950 Q=60m3/h H=128m W=43KW 1台
2#舱内泵封水泵:HDS-100MA-C110*2 n=2950 Q=60m3/h H=220m W=90KW 2台
绞刀冲水水泵:EHC-150ME-C22 n=1450 Q=60m3/h H=40m W=17KW 1台
绞刀电机
绞
刀
桥
架
绞 类型 刀 台数
系 转速(rpm) 统 常用工况功
率 型号
液压马达 1
额定22,最大33
1100KW
MB2400-1725SN
型式 直径 转速 重量
2330MM 0-20-30RPM
12T
长×宽×高
总重量 最大升速 最大倾角
起桥绞车
横移绞车
起锚绞车
锚杆绞车
挖 型式×台数 泥 拉力
绞 速度 车 绳径
主 生产厂及日期
发 额定功率×转速 0kw×1500rpm
159×159MM KTA38-G5(M)
生产厂及日期 容量×转速 电压×电流
频率
泰豪科技 800kw×1500rpm
400Vx1443A 50HZ
燃油
轻油
冷却方式
380C淡水冷却
柴油机型号×台数 付 发 生产厂及日期
泵 闸阀冲水泵:TMC-50MB-C4*2 n=2950 Q=16m3/h H=30m W=2.95KW 1台 主海水泵:EMC-200MC-C15 n=1450 Q=200m3/h H=18m W=13.1KW 3台
低温淡水泵:EMC-200MC-15 n=1450 Q=180m3/h H=20m W=13KW 2台
型宽 体 总宽
18.2m 18.2m
满载 排水量
空载
4965.3t 3537.35t
燃油舱容 淡水舱容
型深 定员
5.2m 22人
空船重量 床位
3537.35t 31
最高建筑距基 线高
公称生产量
3500m³
吸排泥管径
800mm
挖宽
公称排距
3km
挖深
26.5m
排距
舱内泥泵
水下泥泵
舱内泵柴油机
型式
双壳卧式离心泵 单壳卧式离心泵
应急消防水泵: 型号:65CWY-30 25 m3/h 0.3Mpa
油水分离 ZYFM-1 Q=1m3/h 器 上海势久船舶设备有限公司
2007.05
杂用空压机LSHC-20B P=3Mpa n=100rpm Q=5m3/h W=2.2KW 1台 空压机
启动空压机LSHC-50A P=3Mpa n=1500rpm Q=45m3/h W=11KW 2台
电 额定功率×转速
机
缸径×行程
组
燃油
KTA19-G2×1 重庆康明斯 330kw×1500rpm 159×159MM
轻柴油
发电机型号×台数 生产厂及日期 容量×转速 电压×电流 类型
MP-H-300-4×1 泰豪科技
300kw×1500rpm 400Vx541A 无刷自励
水下泵封水泵:HDS-100MA-C18.5 n=1450 Q=60m3/h H=55m W=15.2KW 2台
空调海水泵:EMC-100MC-C5.5 n=1500 Q=40m3/h H=20m W=3.8KW 1台
缸套水预热泵:TMC-32N-1.5*2 n=2950 Q=4m3/h H=30m W=1.21KW 2台
总用泵:EMCE-100MD-C22*2 n=2950 Q=70m3/h H=49m W=18KW 2台 类 污油水泵:EMCE-65MD-C4*2 n=2950 Q=27m3/h H=3.2m W=18KW 1台
25.2M
100m 6km 水下泵电动机 交流异步 YKS630-6×1 湘潭电机 1800kw 993rpm
210.1Ax6000V
桥
架
45.2x6.6x3.8
500T 20RPM 50° 三缆绞车
2/桩 1000KN
0.7Mpa 0.735Mpa 三杰锅炉厂
SB-HW4.D-800W1R-BL-WG4.34×1
型式
V型4冲程
泥 台数 泵 流量
机 压头 组 转速
2 11000
58 338rpm
1 11000
33 258rpm
型号×台数 制造厂及日期
功率 转速
16V240ZC×2 大连北车集团
3240kw 1000rpm
叶轮直径
1900mm
1900MM
缸径×行程
240×257mm
叶轮宽度
535mm
535mm
电流×电压
锁紧缸数 推力 压力
型号×台数 FLY0.8/140-0.7x1
锅 类型 燃油-废气锅炉
炉
用途
全船蒸汽供应
燃油蒸发量 废气蒸发量
重量
800kg/h 1200kg/h
12.5t
工作压力
安全阀开启压 力
厂家
柴油机型号×台数
KTA38-G5(M)×1
发电机型号×台数 SB-HW4.D-800W1R-BL-WG4.34×1