第3章 摄影测量基础知识汇总
摄影测量基础知识
投影射线平行于某一固定方向的投影的投影称为平行投影
斜投影 投影射 线与投 影平面 斜交
正射投影 投影射线 与投影平 面正交
§3-2
中心投影的基本知识
一 、中心投影与正射投影
1、正射投影、中心投影
航片是地面景物的中心投影; 地形图(包括影像地图)是地面景物的正射投影;
§3-2
中心投影的基本知识
一 、中心投影与正射投影
p p % 100 % l
相邻航线上的像片影像重叠程度。
І-1
旁 向 重 叠 度
l
q
Ⅱ-1
q q % 100 % l
航向相邻两个摄影站间的距离D
摄影基线
B m l (1 p%)
P2
S2
摄 影 基 线
P1
S1
B
D m l (1 q%)
E
§3-1
航空摄影
二 、空中摄影过程
c
V
ho hcC
O E
V
T
重 要 的 点 线
点:摄影中心S 像主点o 地主点O 像底点n 地底点N 等角点c 地面等角点C
面:地面E 像片面P 主垂面W 真水平面Es 线:迹线TT 主光线SoO 主垂线SnN 摄影方向线VV 主纵线vv 等角线ScC 主合线hihi 主横线hoho 等比线hchc
又称为方向余弦。
§3-6
像点的空间直角坐标变换与构像方程
一 、像点的空间坐标变换式
R矩阵为正交矩阵。
x u a1 b1 c1 u y R 1 v a b c v 2 2 2 f w a3 b3 c3 w a1U b1V c1W a2U b2V c2W a3U b3V c3W
摄影测量坐标系ppt课件
像 片 外 方 位Z 角 元 素
D
像片倾角
Z zy Y
x s
o
Y
X
像片旋角
v
N
方位角
A
X
§3.6 像点的空间直角坐标变换 与中心投影构像方程
一
像
点 x x'cos y'sin 的 y x'sin y'cos
y y’
a x’
平 面
o
x
坐 标
x
y
cos sin
sin x
cos
y
变
X A
YA
Z A
Xs Ys Zs
X x a1 a2 a3 x
Y
Z
R y f
bc11
b2 c2
b3 c3
y f
x f a1 ( X A X s ) b1 (YA Ys ) c1 (Z A Z s ) a3 ( X A X s ) b3 (YA Ys ) c3 (Z A Z s )
cos
0
0 sin cos sin 0 cos 0
0 1
a1 a2 a3
b1
b2
b3
c1 c2 c3
2、以X 轴为主轴的’-’-’转角系统的坐标变换
a1 coscos a2 cossin a3 sin b1 cossin sin sin cos b2 coscos sin sin sin b3 sin cos c1 sin sin cossin cos c2 sin cos cossin sin c3 coscos
正交变换矩阵的特点
a2 1
a22
a32
1
b2 1
b2 2
摄影测量坐标系

原点:投影中心S x、y轴:分别平行于o-xy的坐标轴 z轴:主光轴方向(os方向为正)
a(x,y,-f)
像
zy x
空
s
间
直
y ox
角
a
坐
标
系
a(x,y,-f)
返回目录
第三章 摄影测量基础知识
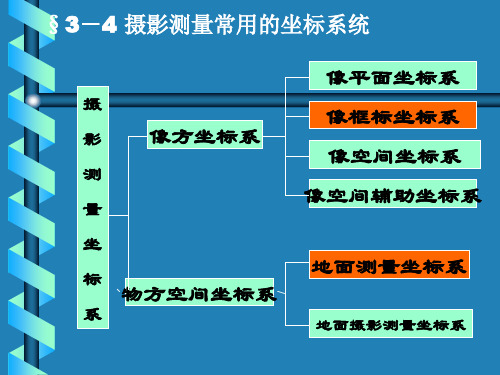
§3-4 摄影测量常用的坐标系统
三、像空间辅助坐标系( S-XYZ )
S
一
像
yf
片 内
o y0
x
p x0
方
位 元
内方位元素(x0,y0,f)可恢复摄影光束
确定摄影瞬间像片在地面坐标系中空间位置和姿态的参数
1、外方位线元素:描述
二 摄影中心在地面空间直角 s
像 坐标系中的位置(Xs、Ys、 Zs)
片
外
Z
方
Zs
Y
位
元 素
Xs
Ys
D
o
2、外方位角元 素:描述像片在 摄影瞬间的空间
arctg ( b 3 ) c3
arcsin( a 3 ) arctg ( a 2 )
a1
3、以Z 轴为主轴的A--v系统的坐标变换
X
x x
Y
RAR
Rv
y
Ry
Z
z z
R RARRv
cosA sinA 0 1 0
0 cosv sinv 0
sinA cosA 00 cos sinsinv cosv 0
arctg ( a 3 ) c3
arcsin( b 3 ) arctg ( b 1 )
b2
2、以X 轴为主轴的’-’-’转角系统的坐标变换
第3章 摄影测量基础知识(1-4)
第三章 摄影测量基础知识
主要内容
一、航空摄影 二、中心投影与正射投影 三、航片上的点、线、面 四、摄影测量常用坐标系 五、像片的内、外方位元素 六、坐标变换 七、中心投影构像方程 八、像点位移
§3-1 航空摄影
一、摄影比例尺与摄影航高
摄影比例尺:航摄像片上一线段与 地面上相应线段水平距离之比 。
2.像片的重叠 航向重叠:同一航线内相邻像片之间的影像重叠60%-65%,最 小>53%
H = ml f B = ml( 1 − p%) L=l
旁向重叠:相邻航线之间的影像重叠,30%-40%最小>15%
q% L
L
(1 − q %) L
3.像片倾角 摄影机轴与铅直方向的夹角 α 垂直摄影:像片倾角小于<2 ,最大不超过3
作用:描述像点在像空间的位置 原点:摄影中心S 坐标轴:x、y轴与像平面坐标系的轴平行,z轴与摄影机轴重合
(x, y,−f )
三、像空间辅助坐标系(右手直角坐标系) S − uvw
作用:过渡性坐标系 原点:摄影中心S 坐标轴:视需要而定(怎样取? )
1. uvw 轴分别平行于地面 摄影测量坐标系 D − XYZ
•航空摄影时像片不能严格保持水平 •地形起伏
1 l = m L
因此航摄像片上的影像比例尺处处不等,摄影 比例尺是平均比例尺
航高:取摄区内的平均高程面作为 摄影基准面时,摄影机的物镜中心 至该面的距离,一般用H表示。
f 1 = m H
绝对航高:摄影瞬间摄影机物镜中心相对于平均海水面 的航高。 相对航高:摄影瞬间摄影机物镜中心相对于其它某一基 准面或某一点的高度。
2. 以每条航线第一张像片的像空间坐标系作为像空间辅助坐标系
摄影测量课件-摄影测量基础知识
攝影比例尺定義:
嚴格定義: 1 l
mL
航攝像片上影像線段的長 地面上對應線段的水準距離
攝影比例尺是像片的平均比例尺
f
:
攝影機主距
1 m
f H
H:攝影航高,以攝區內的平均高程面作為攝影基
準面,攝影機的物鏡中心至該面的距離。(攝影瞬
間攝影機物鏡中心相對於平均海水面的航高稱為絕
對航高。相對於其他某一基準面或某一點的高度均
航空攝影的過程中,我們所關心的區域往 往是要大於一幅影像所覆蓋的區域,這時 候
想想:攝影基線和像片的重疊度有什麼關係?
如果同樣的像幅大小,採用大比例尺和採 用小比例尺攝影基線長度一樣嗎?
攝影基線B 攝站點 航空攝影略圖
攝影方式
❖ 豎直航空攝影:航攝儀在曝
光瞬間物鏡主光軸與地面垂
直,通常規定像片傾角小於
一般情況下,要求航向重疊度最好為60%-65%,最小不 能少於53%;旁向重疊要求30%-40%,最小不少於15%。
思考:如果像幅是23cm*23cm,攝影比例尺是 1:10000,那麼這個像幅所覆蓋的實地面積是多大?
如果是1:50000的比例尺,面積又是多少?
23cm*10000* 23cm*10000=2.3km*2.3km 影:以飛機作為主要工作平
臺,把航攝儀安裝在航攝飛機上,
從空中一定角度對地面物體進行攝
影,飛行航線一般為西東方向,航
攝機在攝影曝光的瞬間物鏡主光軸
保持垂直地面。
而在攝影測量學中我們講的航空攝 影是主要是我們高精度的測繪地形 圖或者是進行4D產品的生產所進行 的空中攝影稱為航空攝影。我們研 究的範圍比較窄一些,而且主要指 的是針對地面進行攝影。
三、攝影測量生產對攝影資料的基本要求
3摄影测量基本知识
a3 a1 b3 ⋅ a2 c3 a3
摄影测量基本知识
五、中心投影构像方程(共线方程)
n 旋转矩阵R中方向余弦的关系
Ø 同一行(列)的各元素自乘之和为1; Ø 任意两行(列)对应元素互乘之和为0; Ø 行列式为1
S f
y
x0
O y0
x
摄影测量基本知识
四、航摄像片的内外方位元素
w S φ Zs o v u y κ x
三个线元素
X S、 YS、 Z S
ω
ϕ、ω、κ
Z Y D D Ys Xs X
三个角元素
摄影测量基本知识
四、航摄像片的内外方位元素
1)以Y轴为主轴的ϕ、 ω 、 κ Z Y S y Zs Z Y Ys N A Xs ϕ κ x ω ox X o X 航向倾角ϕ 旁向倾角ω 像片旋角κ
P T
基准面E 投影面P 透视轴TT 投影中心S 主光轴SO 像主点o 地面主点O 像底点n 地底点N 航高H
l l l l l l l l
像片倾角a 等角点c 地面等角点C 主垂面W 主纵线vv 基本方向线VV 循点J 合面、合线、主合 点I l 主横线 l 等比线
理解主合点和像底点的意义
航摄像片上特殊的点、线、面
摄影测量基本知识
一、航空摄影基本知识
1、摄影比例尺(像片比例尺)
n 摄影比例尺的定义 S f a P
l
1 m
=
l L
=
f H
H
n 航摄像片上处处不相等
Ø 像片非水平拍摄 Ø 地面地形起伏
L
第3章 摄影测量基础知识

§3-3航摄像片上特殊的点、线、面
重 要 的
等角点特性
在倾斜像片和水 平地面上,由等 角点c和C所引出 的一对透视对应 线无方向偏差, 保持着方向角相 等
点 线 特 征
c
C
§3-3航摄像片上特殊的点、线、面
重 要 的
点 线 特 征 等比线特性
等比线的构像比例尺等于水平像片上的摄影比 例尺,不受像片倾斜影响
S
H
A B
C D
§3-1 航空摄影 复杂性:像片上每一个位置的比例尺都可能不同。
数学工具:微 分
f S H d c a b P0 P
A B
C D
§3-1 航空摄影 1、像点比例尺的概念和一般公式 • 像点比例尺的概念 点比例尺定义:为像片上 某点在某一方向上的无穷 小线段与地面上相应线段 长度比的极限。
•
•
§3-3航摄像片上特殊的点、线、面
透视变换中的特别点、线、面 基本要素(S、P、E) 特殊面(3): 主垂面(W) 真水平面/合面(G) R 遁面(R)
G
S
P
W E
§3-3航摄像片上特殊的点、线、面
1、透视变换定义 (Definition of the Perspective Transform )
投影中心
Center of Projection (COP). -摄站
S
S
S
§3-2中心投影的基本知识
2、平行投影与中心投影
阳位与阴位之间的 关系及转换 f S f
b'
a'
主距 Principal distance
a
A
b
B
§3-2中心投影的基本知识
2、平行投影与中心投影
摄影测量学基础知识点

摄影测量学基础知识点一、摄影测量学的基本概念。
1. 摄影测量学定义。
- 摄影测量学是对研究的对象进行摄影,根据所获得的构像信息,从几何方面和物理方面加以分析研究,从而对所摄对象的本质提供各种资料的一门学科。
简单来说,就是利用摄影像片来测定物体的形状、大小和空间位置的学科。
2. 摄影测量的分类。
- 按距离远近分。
- 航天摄影测量:利用航天器(卫星、航天飞机等)上的摄影机对地球表面进行摄影,获取大面积的影像数据,主要用于地形测绘、资源调查、环境监测等全球性或大区域的项目。
- 航空摄影测量:通过飞机等航空飞行器上的航空摄影机对地面进行摄影,是地形测绘、城市规划等中常用的测量手段,它可以获取较高分辨率的影像,覆盖范围相对航天摄影测量小,但精度较高。
- 地面摄影测量:将摄影机安置在地面上,对目标物进行摄影测量。
常用于近景摄影测量,如建筑变形监测、文物保护中的三维建模等。
- 按用途分。
- 地形摄影测量:主要目的是测绘地形图,获取地面的地形地貌信息,包括等高线、地物位置等。
- 非地形摄影测量:用于测定物体的外形、大小和运动状态等,在工业制造(如汽车外形检测)、生物医学(如人体骨骼测量)等领域有广泛应用。
3. 摄影测量的发展历程。
- 早期的摄影测量主要基于模拟摄影测量仪器,如立体测图仪等。
通过光学机械的方法,将摄影像片进行模拟处理,实现地形测绘等功能。
- 随着计算机技术的发展,进入解析摄影测量阶段。
通过建立数学模型,利用计算机解算像片上像点的坐标,提高了测量的精度和效率。
- 现在,数字摄影测量成为主流。
它以数字影像为基础,利用计算机视觉、图像处理等技术,实现自动化、智能化的摄影测量处理,如数字高程模型(DEM)生成、正射影像图制作等。
二、摄影测量的基本原理。
1. 中心投影原理。
- 摄影测量中,摄影机的镜头相当于一个中心投影的投影中心。
地面上的点在像片上的成像过程是中心投影。
- 设地面点A,摄影中心S,像点a,在中心投影下,A点发出的光线通过镜头S 后,在像平面上成像为a点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
相邻像片间具有一定的重叠。
以测图为目的进行的航空摄影多取用竖直摄影 方式 。
三、摄影测量生产对摄影资料的基本要求
1.影像色调的要求 像片清晰、色调一致、反差适中
2. 对像片倾斜角的要求
航空摄影时,一般要求倾角不大于2度,最大不超过3度。
3.对像片重叠的要求
• 航向重叠与旁向重叠
航向重叠:同一航线内 相邻像片应有一定范围 的影像重叠
三、中心投影的正片位置与负片位置
负片位置(阴位):投影平面与物点在投影中 心的两侧 正片位置(阳位):投影平面与物点在投影中 心的同侧
S
S
阳位与阴位之间 的关系及转换
b' a'
f S
f
主距 Principal distance
ab A
B
无论正片位置还是负片位置,像点与物点的几何 关系不变,数学表达式不变
1:500 1:1000
1:8000—1:12000 1:2000
中比例尺 小比例尺
1:15000—1:20000 (23cm×23cm)
1:10000—1:25000 1:25000—1:35000 (23cm×23cm) 1:20000—1:30000
1:35000—1:55000
1:5000
1:10000 1:25000 1:50000
3.3 航摄像片上特殊的点、线、面
透视变换定义 (Definition of the Perspective Transform)
P S
两个平面之间 的中心投影变换, 称为透视变换。
在透视变换的 情况下,投影中心 称为透视中心。
T
1.航摄像片上的重要点、线、面
ES S
hi P v
i
hi o
c T
旁向重叠:相邻航线的 相邻像片上应具有一定 范围的影像重叠
像片的重叠是进行立体观察、量测及像片连接的必须条件。
航向重叠:同一航线内相邻像 片应有一定范围的影像重叠 航向重叠度:
p px 100 % lx
一般情况,要求航向重叠度为60%-65%,最小不能少于 53%
地面平坦、像片保持水平飞行时,可求得摄影 基线的长度:
n
J
V(v) N
C
OV
E
T
透视变换: 两个平面间的中心投影变换。 像主点O: 投影中心S在投影面P上的垂足(主光轴
投影中心
Center of
Projection
(COP).
-摄站
S
中心投影
斜投影
正射投影(垂直投影)
地形图是地面的什么投影?
AB
D C
地形图 a0 b0 c0 d0
地形图是地面的正射投影! 航摄像片??
二、航片是地面的中心投影
Q
S‘
Q’
S
Q
S
摄影测量成图的主要任务之一是将中心投影的像片 转化成正射投影
• 航线弯曲度:航线两端像片的像主点间的直线距离l
与偏离该直线最远的像主点到直线的距
300
5.对像片旋角的要求
像片旋角:相邻两像片的主点的连线与像幅沿航线方 向的两框标连线之间的夹角
像片旋角过大 会减少立体像 对的有效范围
一般情况小于6度,个别不应大于8度,而且不能有连续 三张像片的旋角超过6度的情况。
第三章 摄影测量基础知识
3.1 航空摄影 3.2 中心投影的基本知识 3.3 航摄像片上特殊的点、线、面 3.4 摄影测量常用的坐标系统 3.5 航摄像片上的内、外方位元素 3.6 像点的空间直角坐标变换 3.7 中心投影构像方程 3.8 航摄像片上的像点位移
3.1 航空摄影
一、航空摄影前的准备工作
B=ml*(1-p%)
旁向重叠:
相邻航线的相邻像片上应具有一定范围的影像重叠
旁向重叠度:
q qy 100% ly
一般情况下,旁向重叠度不得少于15%,保持在30%-40%
之间。
地面平坦,飞机保持水平飞行,可求得航线间距:
D=ml*(1-q%)
4.对航线弯曲的要求
• 航线弯曲:把一条航线内的像片根据地物的影像叠拼 起来,各张像片的像主点连线不在一条直线上,而呈 现为弯弯曲曲的折线
1l mL
平均比例尺
1 f mH
H为摄影瞬间摄影机物镜中心相对于摄区平均 高程面的距离
摄影比例尺的选择
必须考虑成图比例尺、测图方法、成图精度, 另外还要考虑经济性以及航摄像片往后的使用 可能性
航摄比例尺与成图比例尺的关系
比例尺类型
航摄比例尺
成图比例尺
大比例尺
1:2000—1:3000 1:4000—1:6000
确定摄区范围
制
选择航摄仪
定
航
确定摄影比例尺
摄
计
确定摄影航高
划
需要的像片数、日期等
1. 确定摄区范围
摄区面积较大或摄区地形复杂时,要进行 分区,按分区进行摄影
2. 航摄仪的选择
平坦地区大比例尺测图
综合法测图 长焦距窄角
非平坦地区 全能法测图
中焦距常角或宽角
3.摄影比例尺(像片比例尺)的确定
摄影比例尺定义 严格定义:
4. 摄影航高的确定
航高:摄影机相对某一水准面的高度。
相对航高:相对于某一基准面的高度 摄影航高:当取摄区内的平均高程面作为摄影基 准面时,摄影机的物镜中心至该面的距离
H m f
绝对航高:相对于平均海平面的高度
二、空中摄影
在曝光瞬间,摄影机物镜所处的空间位置称为摄站点。 航线方向相邻两摄站点的空间连线称为摄影基线, 通常用B表示。
6.对航高差的要求 航高差:空中摄影时飞行航高的变化量
航摄分区内实际航高与设计航高之差不应大于 设计航高的5%
H 5%H
同一航线相邻航片航高差不得大于30米,最大 航高与最小航高之差不得大于50米。
四、空中摄影质量的评定
(1)负片上影像是否清晰、框标影像是否齐全、像幅 四周指示器件的影像(如水准气泡等)是否清晰可辨; (2)由于太阳高度角的影响,地物阴影长度是否超过 摄影规范的规定,地物阴暗和明亮部分的细部能否辨 认清楚; (3)航摄负片上是否存在云影、划痕、乳剂层脱落等 现象; (4)负片上的黑度是否符合要求,影像反差等不得大 于规范要求; (5)航带的直线性、航带间的平行性、像片影像的重 叠度、航高差和摄影比例尺等等都要检查评定,并不 得超出规定的技术指标。
3.2 中心投影的基本知识
摄影测量是通过量测像片来获得地面目标的几何 信息,这就要研究像片和地面之间的几何投影关系。
a
A
一、中心投影与正射投影
投影:用一组假想的直线将物体形状向几何面上 投射成像
中心投影:所有投射线或其延长线都通
投影
过一个固定点的投影。
平行投影:投射线互相平行的投影。 分为斜投影与正射投影。