平面共轭分度凸轮机构设计计算和运动分析
基于AutoCAD的平面共轭凸轮机构运动仿真与误差分析

基于 A t A u C D的 平面共轭 凸轮机 构运动仿真 与误 差分析 o
口 李 敏
武汉 405 306 江 汉 大 学 化学 与环 境 工 程 学 院
摘
要 :设 计 和 实现 了一 种 基 于 A t A 的共 轭 凸轮 机 构 运 动 仿 真 的方 法 , A t i uo D C 用 u lp函数 绘 制 和 仿 真 共 轭 凸轮 机 os
上 述采 用 数 值计 算 的检 测 方法 不 够 直 观 , 算 得 计
1)主 摆
动 从 动 件 位 置 的 搜 索 方
法
到 的 辅 助 凸轮 理 论 轮 廓 线 和 实 际 轮 廓 线 之 间 的相 位 关
收稿 日期 :0 8 月 20 年3
机械制造4 卷 第 5 9 6 2 期
文 献 标识 码 : B
文 章 编 号 :00—4 9 (0 8 0 10 9 82 0 )9—0 3 0 3—0 3
共 轭 凸 轮 机 构 是 指 由两 组 完 整 的 凸 轮 机 构 , 同类
构 件 相 互 刚 性 连 接 , 别 控 制 同 一 从 动 件 升 程 与 回 程 分
系也 很难 确 定 , 啮合 问 隙位 置 和共 轭 凸轮 机 构运 动 且 之 间 的关 系 不 明 确 , 响 了 检 测 效 果 。 影
为 广 泛 。 图 1 示 如 所
为该 机 构 的 结 构 示 意 图 , 中 主 凸 轮 图
和主摆 动从 动件 控 制 整 个 机 构 的 升
程 , 助 凸 轮 控 制 辅 和辅助 摆 动从 动件
控 制 整 个 机 构 的 回
程 。
工 具 , 用 图 解 法 的原 理 对 图形 进 行 精 确 定 位 和 绘 制 , 采 保 证 各 实 体 的相 对 几 何 关 系 , 后 通 过 改 变 输 入 量 的 然 值 , 断 修 正 图形 中实 体 的 特 征 值 ( 共 轭 凸 轮 旋 转 角 不 如
平面共轭分度凸轮机构设计计算和运动分析

% 共轭分度凸轮机构设计与分析% 相关的函数文件:% 计算凸轮机构运动参数(zhbx_cs.m)% 绘制凸轮机构运动曲线(zhbx_tx.m)% 计算凸轮廓线坐标(zhbx_xyRP.m)% 将凸轮廓线辅坐标转化为动坐标(zhbx_xyRPd.m)disp ' 用键盘输入已知条件:'n=input('凸轮转速(r/min) n = ');C=input('机构中心距(mm) C = ');disp '选择凸轮头数H、转盘分度数I与凸轮分度期转角theta_f的对应关系:'disp ' H=1时,I=6、8、10、12、16,theta_f=60、75、90、120、150度'disp ' H=2时,I=3、4、5、6、8,theta_f=90、120、150、180、210、240、270度' disp ' H=3时,I=2、4,theta_f=150、180、210、240、270度'disp ' H=4时,I=1、2、3,theta_f=180、210、240、270度'H=input('凸轮头数H = ');I=input('转盘分度数I = ');theta_f=input('凸轮分度期转角(度) theta_f = ');% 1-共轭分度凸轮机构运动分析% 凸轮角速度omega_1=pi*n/30;% 转盘滚子数z=H*I;% 凸轮停歇期转角if H<2theta_d=180-theta_f;elsetheta_d=360-theta_f;end% 转盘分度期转位角phi_f=360/I;% 机构分度期时间t_f和停歇期时间t_dhd=pi/180.0; % 角度转换为弧度的系数t_f=theta_f*hd/omega_1;t_d=theta_d*hd/omega_1;% 机构动停比k和运动系数tauk=t_f/t_d;tau=t_f/(t_f+t_d);disp '======== 共轭分度凸轮机构基本数据========'fprintf(' 凸轮转速n = %3.4f r/min \n',n)fprintf(' 机构中心距 C = %3.4f mm \n',C)fprintf(' 凸轮头数H = %3.0f \n',H)fprintf(' 转盘分度数I = %3.0f \n',I)fprintf(' 转盘滚子数z = %3.0f \n',z)fprintf(' 凸轮角速度omega_1 = %3.4f 1/s \n',omega_1)fprintf(' 凸轮分度期转角theta_f = %3.4f 度\n',theta_f)fprintf(' 凸轮停歇期转角theta_d = %3.4f 度\n',theta_d)fprintf(' 转盘分度期转角phi_f = %3.4f 度\n',phi_f)fprintf(' 机构分度期时间t_f = %3.4f s \n',t_f)fprintf(' 机构停歇期时间t_d = %3.4f s \n',t_d)fprintf(' 机构动停比k = %3.4f \n',k)fprintf(' 机构运动系数tau = %3.4f \n',tau)计算结果:======== 共轭分度凸轮机构基本数据========凸轮转速n = 100.0000 r/min机构中心距 C = 100.0000 mm凸轮头数H = 2转盘分度数I = 4转盘滚子数z = 8凸轮角速度omega_1 = 10.4720 1/s凸轮分度期转角theta_f = 180.0000 度凸轮停歇期转角theta_d = 180.0000 度转盘分度期转角phi_f = 90.0000 度机构分度期时间t_f = 0.3000 s机构停歇期时间t_d = 0.3000 s机构动停比k = 1.0000机构运动系数tau = 0.5000% 计算凸轮机构运动参数(调用组合摆线运动M文件:zhbx_cs.m)bc=0.5; % bc是转角分度单位[zhbx,i_zhbx]=zhbx_cs(theta_f,phi_f,hd,omega_1,bc);fprintf(' 组合摆线运动参数数组行数i_zhbx = %3.0f \n',i_zhbx)% 输出共轭分度凸轮机构运动参数[' 凸轮转角',' 转盘角位移',' 角速度',' 角加速度',' 跃度',' 角速度比',' 角加速度比'][zhbx(:,1),zhbx(:,2)/hd,zhbx(:,3),zhbx(:,4),zhbx(:,5),zhbx(:,6),zhbx(:,7)]计算结果:凸轮转角转盘角位移角速度角加速度跃度角速度比角加速度比0 0 0 0 3.5192 0 030.0000 3.8787 0.3345 0.8664 -0.6111 0.0319 0.007960.0000 20.1752 0.7254 0.5655 -2.6959 0.0693 0.005290.0000 45.0000 0.8798 0.0000 -3.5192 0.0840 0.0000120.0000 69.8248 0.7254 -0.5655 -2.6959 0.0693 -0.0052150.0000 86.1213 0.3345 -0.8664 -0.6111 0.0319 -0.0079180.0000 90.0000 0 -0.0000 3.5192 0 -0.0000% 绘制凸轮机构运动曲线(调用组合摆线绘图M文件:zhbx_tx.m)zhbx_tx(zhbx,hd,theta_f)% 备注:绘制的凸轮机构运动曲线形态正常(见图12-9)。
凸轮机构的设计和计算详解

凸轮机构的设计和计算详解1. 引言凸轮机构是一种常见的机械传动装置,通过凸轮的运动来实现对其他部件的控制和驱动。
凸轮机构广泛应用于发动机、机械加工、自动化设备等领域。
在本文中,我们将详细介绍凸轮机构的设计和计算方法。
2. 凸轮机构的基本原理凸轮机构由凸轮、从动件和控制件组成。
凸轮通过旋转或移动的方式,驱动从动件进行线性或旋转运动。
不同凸轮形状和运动方式将实现不同的功能。
3. 凸轮的设计要点凸轮的设计涉及凸轮形状、凸轮面积、凸轮运动规律等方面。
在进行凸轮设计时,需要考虑以下要点:•运动要求:根据从动件需要的运动类型(线性或旋转)、速度和加速度要求,确定凸轮的形状和运动规律。
•动态负载:凸轮在运动过程中所承受的动态负载应被考虑在内,以确保凸轮的强度和耐久性。
•材料选择:根据凸轮的工作条件和负载要求,选择适当的材料来制造凸轮,以保证其可靠性和寿命。
4. 凸轮机构的计算方法4.1 凸轮剖面的计算凸轮剖面的计算是凸轮机构设计中的重要一环。
根据凸轮的运动规律和从动件的运动要求,可以进行凸轮剖面的计算。
常用的凸轮剖面计算方法有:•凸轮剖面生成法:根据从动件的运动要求,通过几何构造和插值计算,生成凸轮剖面。
•凸轮运动分析法:通过分析凸轮的运动规律和从动件的运动要求,推导出凸轮剖面的数学表达式。
4.2 凸轮机构的运动学分析凸轮机构的运动学分析是确定凸轮机构各部件的运动规律和参数的过程。
通过运动学分析,可以计算凸轮机构的几何关系、速度和加速度等。
常用的凸轮机构运动学分析方法有:•图形法:通过绘制凸轮机构的运动示意图和运动曲线,分析凸轮机构的运动规律。
•解析法:通过建立凸轮机构的运动学方程,推导出各部件的运动参数,并进行计算。
4.3 凸轮机构的强度计算凸轮机构的强度计算是为了确定凸轮所承受的载荷是否安全,并选择适当的材料和结构来满足设计要求。
在强度计算中,需要考虑凸轮的静载荷、动载荷和疲劳载荷等。
常用的凸轮机构强度计算方法有:•静态强度计算:通过分析凸轮在静态载荷下的应力和变形情况,确定凸轮的强度和刚度。
平行分度凸轮机构设计方案专家系统的开发及三维运动仿真
平行分度凸轮机构设计专家系统的开发及三维运动仿真文章来源:大中小]本文所述的该系统给出了界面友好的参数输入对话框,能够完成机构参数的自动综合和凸轮轮廓的自动生成,实现了直接在Pro/E环境下进行仿真。
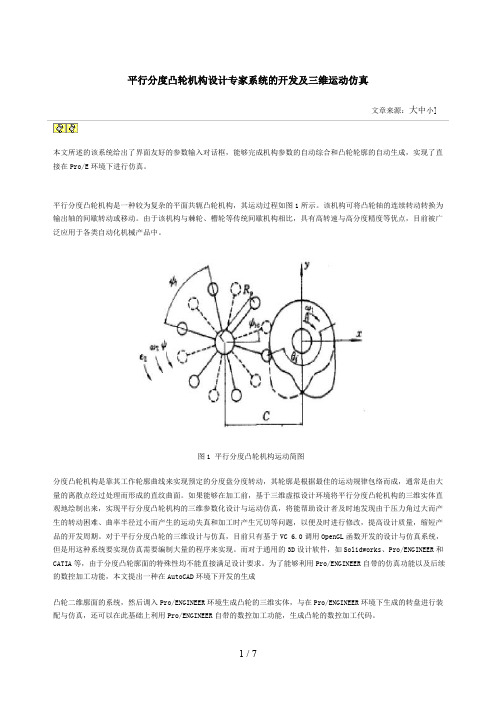
平行分度凸轮机构是一种较为复杂的平面共轭凸轮机构,其运动过程如图1所示。
该机构可将凸轮轴的连续转动转换为输出轴的间歇转动或移动。
由于该机构与棘轮、槽轮等传统间歇机构相比,具有高转速与高分度精度等优点,目前被广泛应用于各类自动化机械产品中。
图1 平行分度凸轮机构运动简图分度凸轮机构是靠其工作轮廓曲线来实现预定的分度盘分度转动,其轮廓是根据最佳的运动规律包络而成,通常是由大量的离散点经过处理而形成的直纹曲面。
如果能够在加工前,基于三维虚拟设计环境将平行分度凸轮机构的三维实体直观地绘制出来,实现平行分度凸轮机构的三维参数化设计与运动仿真,将能帮助设计者及时地发现由于压力角过大而产生的转动困难、曲率半径过小而产生的运动失真和加工时产生冗切等问题,以便及时进行修改,提高设计质量,缩短产品的开发周期。
对于平行分度凸轮的三维设计与仿真,目前只有基于VC 6.0调用OpenGL函数开发的设计与仿真系统,但是用这种系统要实现仿真需要编制大量的程序来实现。
而对于通用的3D设计软件,如Solidworks、Pro/ENGINEER和CATIA等,由于分度凸轮廓面的特殊性均不能直接满足设计要求。
为了能够利用Pro/ENGINEER自带的仿真功能以及后续的数控加工功能,本文提出一种在AutoCAD环境下开发的生成凸轮二维廓面的系统,然后调入Pro/ENGINEER环境生成凸轮的三维实体,与在Pro/ENGINEER环境下生成的转盘进行装配与仿真,还可以在此基础上利用Pro/ENGINEER自带的数控加工功能,生成凸轮的数控加工代码。
一、平行分度凸轮设计专家系统的结构本专家系统主要由知识库、推理机、综合数据库、方法库和知识库管理系统组成。
基于Autodesk Inventor的共轭凸轮设计与运动仿真
基于Autodesk Inventor的共轭凸轮设计与运动仿真笔者结合工作中的实际案例——一位使用Inventor产品多年的印刷机械设备用户,困惑于如何借助3D软件提升设计能力——分析其设计难题,例如比较普遍的凸轮设计问题,其中一个共轭凸轮的机构设计尤为难以实现。
本文就是基于解决用户共轭凸轮设计难题的真实案例,介绍了借助Autodesk Inventor设计共轭凸轮的方法及思路。
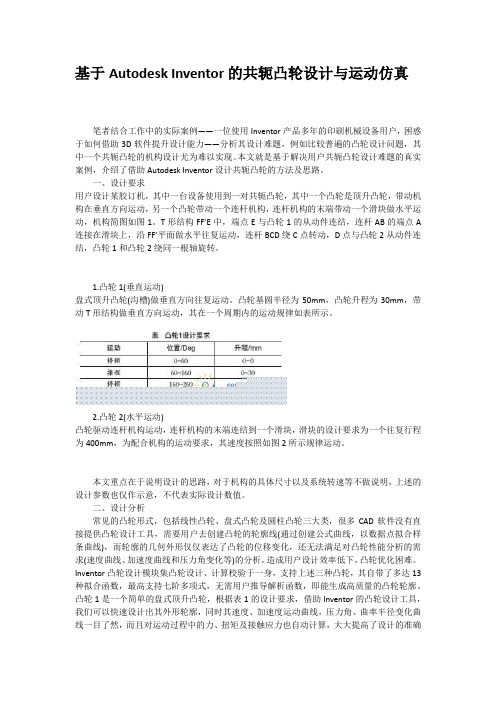
一、设计要求用户设计某胶订机,其中一台设备使用到一对共轭凸轮,其中一个凸轮是顶升凸轮,带动机构在垂直方向运动,另一个凸轮带动一个连杆机构,连杆机构的末端带动一个滑块做水平运动,机构简图如图1。
T形结构FF’E中,端点E与凸轮1的从动件连结,连杆AB的端点A 连接在滑块上,沿FF’平面做水平往复运动,连杆BCD绕C点转动,D点与凸轮2从动件连结,凸轮1和凸轮2绕同一根轴旋转。
1.凸轮1(垂直运动)盘式顶升凸轮(沟槽)做垂直方向往复运动。
凸轮基圆半径为50mm,凸轮升程为30mm,带动T形结构做垂直方向运动,其在一个周期内的运动规律如表所示。
2.凸轮2(水平运动)凸轮驱动连杆机构运动,连杆机构的末端连结到一个滑块,滑块的设计要求为一个往复行程为400mm,为配合机构的运动要求,其速度按照如图2所示规律运动。
本文重点在于说明设计的思路,对于机构的具体尺寸以及系统转速等不做说明,上述的设计参数也仅作示意,不代表实际设计数值。
二、设计分析常见的凸轮形式,包括线性凸轮、盘式凸轮及圆柱凸轮三大类,很多CAD软件没有直接提供凸轮设计工具,需要用户去创建凸轮的轮廓线(通过创建公式曲线,以数据点拟合样条曲线),而轮廓的几何外形仅仅表达了凸轮的位移变化,还无法满足对凸轮性能分析的需求(速度曲线、加速度曲线和压力角变化等)的分析,造成用户设计效率低下,凸轮优化困难。
Inventor凸轮设计模块集凸轮设计、计算校验于一身,支持上述三种凸轮,其自带了多达13种拟合函数,最高支持七阶多项式,无需用户推导解析函数,即能生成高质量的凸轮轮廓。
毕业论文-凸轮机构建摸,受力分析和运动仿真与分析研究

摘要凸轮是一具有曲面轮廓的构件,一般多为原动件(有时为机架);当凸轮为原动件时,通常作等速连续转动或移动,而从动件则按预期输出特性要求作连续或间隙的往复运动、移动或平面复杂运动。
本文主要介绍凸轮的大体概念与凸轮廓线的设计计算,以及后期使用Pro/E软件仿真其廓线。
凸轮轮廓曲线是凸轮机构设计的关键,常用的设计方法有解析法和图解法。
本文将对这两这种方法进行大致分析与应用设计,利用Pro/E软件绘制凸轮机构实体模型,并用Pro/E软件自带的Pro/MECHANICA Motion插件设计凸轮机构运动模型,进行机构运动学仿真分析,可以较准确掌握机械产品零部件的位移、速度和加速度等动力学参数,进而可分析机构动作的可靠性。
主要技术要求为:熟悉凸轮设计基本原理及相关理论计算;凸轮机构运动仿真及受力分析;指定内容的翻译和Pro/E软件的熟练应用。
本文将重点研究凸轮机构建摸,受力分析和运动仿真与分析。
通过理论上的计算和研究,结合图解以及解析的方法,算出凸轮廓线的大致数据,用Pro/E软件将其绘制出,进行运动仿真,记录和研究其位移、速度和加速度等动力参数,最后分析出机构动作的可靠性。
使以后工作中,可以更准确掌握机械产品零部件的动力方面个参数,减少事故的发生,降低设计的难度。
关键词:凸轮;廓线设计;Pro/E;三维造型;仿真。
AbstractCam is a component with a surface profile is generally more dynamic pieces of the original (sometimes for the rack), when the cam piece to its original form, it is usually in a row for the constant rotation or move, and the follower output characteristics according to the requirements expected for continuous or reciprocating motion of the space, move, or the complexity of sports plane. This paper mainly introduces the general concept of the cam and cam profile design and calculation, and the latter the use of Pro / E software simulation of its profile.Cam cam curve design is the key to the design of methods commonly used analytical method and graphical method. In this paper, two such methods will be more or less analysis and application design, use of Pro/E software cam solid model rendering, and Pro / E software comes with the Pro/MECHANICA Motion cam plug design movement model, the kinematics Simulation can b a more accurate knowledge of machinery parts and components of displacement, velocity and acceleration, such as kinetic parameters, which can analyze the reliability of body movement.The main technical requirements are:familiar with the basic principles of cam design and related theoretical calculation; cam mechanism motion simulation and stress analysis; specify the contents of the translation and Pro/e application software proficiency.This article will focus on cam modeling, stress analysis and motion simulation and analysis. Through theoretical calculations and research, combined with graphical and analytical methods, calculate the approximate convex contour data, using Pro/E software to draw, simulation exercise, record and study the displacement, velocity and acceleration and other dynamic parameters, Finally, the reliability of the agency action. So after work, can be more accurate machinery parts and components of the dynamic parameters, to reduce accidents, reduce the difficulty of design.Keywords:Cam, Profile Design ,Pro/E, Three-dimensional shape,Simulation.目录1绪论 (1)1.1选题意义 (1)1.2 仿真技术的发展 (3)1.3 Pro/Engineer在机械制造中的应用 (5)1.3.1 Pro/Engineer软件介绍 (5)1.3.2Pro/E在我国机械行业中的应用 (8)2凸轮轮廓线的设计 (10)2.1绪论 (10)2.2 凸轮机构的分类 (11)2.2.1 按两活动构件之间的相对运动特性分类 (11)2.2.2 按从动件运动副元素形状分类 (11)2.2.3 按凸轮高副的锁合方式分类 (11)2.3从动件运动规律 (12)2.3.1 基本运动规律 (12)2.4 凸轮轮廓线的设计 (14)2.4.1凸轮轮廓曲线的计算 (14)2.5凸轮机构基本尺寸的确定 (17)2.5.1凸轮机构的压力角及许用值 (17)2.6.2凸轮理论轮廓的外凸部分。
凸轮机构的设计计算和运动分析

% ******** 偏置移动从动件盘形凸轮设计绘图和运动分析******** disp ' ######## 已知条件########'disp ' 凸轮作逆时针方向转动,从动件偏置在凸轮轴心的右边'disp ' 从动件在推程作等加速/等减速运动,在回程作余弦加速度运动' % 基圆半径;滚子半径;从动件偏距;从动件升程rb=40;rt=10;e=15;h=50;% 推程运动角;远休止角;回程运动角;推程许用压力角;凸轮转速ft=100;fs=60;fh=90;alpha_p=35;n=200;% 角度和弧度转换系数;机构尺度hd=pi/180;du=180/pi;se=sqrt(rb^2-e^2);w=n*pi/30; omega=w*du; % 凸轮角速度(°/s)fprintf(' 基圆半径rb = %3.4f mm \n',rb)fprintf(' 滚子半径rt = %3.4f mm \n',rt)fprintf(' 推杆偏距 e = %3.4f mm \n',e)fprintf(' 推程升程h = %3.4f mm \n',h)fprintf(' 推程运动角ft = %3.4f 度\n',ft)fprintf(' 远休止角fs = %3.4f 度\n',fs)fprintf(' 回程运动角fh = %3.4f 度\n',fh)fprintf(' 推程许用压力角alpha_p = %3.4f 度\n',alpha_p) fprintf(' 凸轮转速n = %3.4f r/min \n',n) fprintf(' 凸轮角速度(弧度) w = %3.4f rad/s \n',w)fprintf(' 凸轮角速度(度) omega = %3.4f 度/s \n',omega) disp ' 'disp ' @@@@@@ 计算过程和输出结果@@@@@@' disp ' '% (1)---校核凸轮机构的压力角和轮廓曲率半径'disp ' *** 计算凸轮理论轮廓的压力角和曲率半径***'disp ' 1 推程(等加速/等减速运动)'for f=1:ftif f<=ft/2s(f)=2*h*f^2/ft^2;s=s(f); % 等加速-位移方程ds(f)=4*h*f*hd/(ft*hd)^2;ds=ds(f);d2s(f)=4*h/(ft*hd)^2;d2s=d2s(f);vt(f)=4*h*omega*f/ft^2; % 等加速-速度方程elses(f)=h-2*h*(ft-f)^2/ft^2;s=s(f); % 等减速-位移方程ds(f)=4*h*(ft-f)*hd/(ft*hd)^2;ds=ds(f);d2s(f)=-4*h/(ft*hd)^2;d2s=d2s(f);vt(f)=4*h*omega*(ft-f)/ft^2; % 等减速-速度方程endalpha_t(f)=atan(abs(ds-e)/(se+s)); % 推程压力角(弧度)alpha_td(f)=alpha_t(f)*du; % 推程压力角(度)pt1=((se+s)^2+(ds-e)^2)^1.5;pt2=abs((se+s)*(d2s-se-s)-(ds-e)*(2*ds-e));rho_t(f)=pt1/pt2; % 推程曲率半径st(f)=s;endalpha_tm=max(alpha_td);fprintf(' 推程最大压力角alpha_tm = %3.4f 度\n',alpha_tm)for f=1:ftif alpha_td(f)==alpha_tm;ftm=f;break;endendfprintf (' 对应的位置角ftm = %3.4f 度\n',ftm)if alpha_tm>alpha_pfprintf(' * 凸轮推程压力角超过许用值,需要增大基圆!\n')endrho_tn = min(rho_t);fprintf (' 最小曲率半径rho_tn = %3.4f mm\n',rho_tn)for f=1:ftif rho_t(f)==rho_tn;ftn=f;break;endendfprintf(' 对应的位置角ftn = %3.4f 度\n',ftn)if rho_tn<rt+5fprintf(' * 凸轮推程轮廓曲率半径小于许用值,需要增大基圆或减小滚子!\n') enddisp ' 2 回程(余弦加速度运动-简谐运动)'d1=ft+fs;d2=ft+fs+fh; % 回程运动角范围for f=d1:d2k=f-d1;s(f)=0.5*h*(1+cos(pi*k/fh));s=s(f); % 简谐运动-位移方程ds(f)=-0.5*pi*h*sin(pi*k/fh)/(fh*hd);ds=ds(f);d2s(f)=-0.5*pi^2*h*cos(pi*k/fh)/(fh*hd)^2;d2s=d2s(f);alpha_h(f)=atan(abs(ds+e)/(se+s)); % 回程压力角(弧度)alpha_hd(f)=alpha_h(f)*du; % 回程压力角(度)ph1=((se+s)^2+(ds-e)^2)^1.5;ph2=abs((se+s)*(d2s-se-s)-(ds-e)*(2*ds-e));rho_h(f)=ph1/ph2; % 回程曲率半径sh(f)=s;vh(f)=-0.5*pi*h*omega*sin(pi*f/fh)/fh; % 简谐运动-速度方程ah(f)=-0.5*pi^2*h*omega^2*cos(pi*f/fh)/fh^2; % 简谐运动-加速度方程endalpha_hm = max(alpha_hd(d1:d2));fprintf(' 回程最大压力角alpha_hm = %3.4f 度\n',alpha_hm)for f=d1:d2if alpha_hd(f)==alpha_hm;fhm=f;break;endendfprintf(' 对应的位置角fhm = %3.4f 度\n',fhm)rho_hn=min(rho_h(d1:d2));fprintf(' 最小曲率半径rho_hn = %3.4f mm\n',rho_hn)for f=d1:d2if rho_h(f)==rho_hn;fhn=f;break;endendfprintf(' 对应的位置角fhn = %3.4f 度\n',fhn)if rho_hn<rt+5fprintf(' * 凸轮回程轮廓曲率半径小于许用值,需要增大基圆或减小滚子!\n') enddisp ' '% (2)---计算凸轮机构的从动件运动参数'disp ' *** 计算凸轮机构从动件的运动参数***'disp ' 1 推程(等加速/等减速运动)'disp ' 凸轮转角位移s(mm) 速度v(mm/s)'for f=10:10:ftydcs_t=[f st(f) vt(f)];disp(ydcs_t)endat_1=4*h*omega^2/ft^2;at_2=-4*h*omega^2/ft^2;fprintf(' 等加速上升的加速度at_1 = %3.4f (mm/s^2) \n',at_1)fprintf(' 等减速上升的加速度at_2 = %3.4f (mm/s^2) \n',at_2)disp ' 2 回程(余弦加速度运动-简谐运动)'disp ' 凸轮转角位移s(mm) 速度v(mm/s) 加速度a(mm/s^2)'for f=d1:10:d2ydcs_h=[f sh(f) vh(f) ah(f)];disp(ydcs_h)end% (3)---绘制凸轮机构的从动件运动线图figure(1);subplot(3,2,1) % 推程位移线图f=1:ft;plot(f,st);xlabel ('凸轮转角\it \phi / \rm( °)')ylabel ('\it s / \rm(mm)')title('从动件推程位移线图');subplot(3,2,2) % 回程位移线图f=d1:d2;plot(f,sh(d1:d2));xlabel ('凸轮转角\it \phi / \rm( °)')ylabel ('\it s / \rm(mm)')title('从动件回程位移线图');subplot(3,2,3) % 推程速度线图f=1:ft;plot(f,vt);xlabel ('凸轮转角\it \phi / \rm( °)')ylabel ('\it v / \rm(mm/s)')title('从动件推程速度线图');subplot(3,2,4) % 回程速度线图f=d1:d2;plot(f,-vh(d1:d2));xlabel ('凸轮转角\it \phi / \rm( °)')ylabel ('\it v / \rm(mm/s)')title('从动件回程速度线图');subplot(3,2,5) % 推程加速度线图line([0,ft/2],[at_1,at_1]);line([ft/2,ft/2],[at_1,at_2]); % 等加速等减速之间的突变垂线line([ft/2,ft],[at_2,at_2]);xlabel ('凸轮转角\it \phi / \rm( °)')ylabel ('\it a / \rm(mm/s^2)')title('从动件推程加速度线图');subplot(3,2,6) % 回程加速度线图f=d1:d2;plot(f,-ah(d1:d2));xlabel ('凸轮转角\it \phi / \rm( °)')ylabel ('\it a / \rm(mm/s^2)')title('从动件回程加速度线图');disp ' '% (4)---计算凸轮理论廓线与实际廓线的直角坐标和向径'disp ' ****** 凸轮理论轮廓与实际轮廓的直角坐标******'nd=360;for f=1:ndif f<=ft/2 % 等加速运动s(f)=2*h*f^2/ft^2;s=s(f);ds(f)=4*h*f*hd/(ft*hd)^2;ds=ds(f);elseif f>ft/2 & f<=ft % 等减速运动s(f)=h-2*h*(ft-f)^2/ft^2;s=s(f);ds(f)=4*h*(ft-f)*hd/(ft*hd)^2;ds=ds(f);elseif f>ft & f<=d1 % 远休止角s=h;ds=0;elseif f>d1 & f<=d2 % 简谐运动k=f-d1;s(f)=0.5*h*(1+cos(pi*k/fh));s=s(f);ds(f)=-0.5*pi*h*sin(pi*k/fh)/(fh*hd);ds=ds(f);elseif f>d2 & f<=nds=0;ds=0;endxx(f)=(se+s)*sin(f*hd)+e*cos(f*hd);x=xx(f); % 理论轮廓横坐标yy(f)=(se+s)*cos(f*hd)-e*sin(f*hd);y=yy(f); % 理论轮廓纵坐标dx(f)=(ds-e)*sin(f*hd)+(se+s)*cos(f*hd);dx=dx(f);dy(f)=(ds-e)*cos(f*hd)-(se+s)*sin(f*hd);dy=dy(f);xp(f)=x+rt*dy/sqrt(dx^2+dy^2);xxp=xp(f); % 实际轮廓横坐标yp(f)=y-rt*dx/sqrt(dx^2+dy^2);yyp=yp(f); % 实际轮廓纵坐标r(f)=sqrt(x^2+y^2); % 理论轮廓向径rp(f)=sqrt(xxp^2+yyp^2); % 实际轮廓向径enddisp ' 1 推程(等加速/等减速运动)'disp ' 凸轮转角理论x 理论y 实际x 实际y'for f=10:10:ftnu=[f xx(f) yy(f) xp(f) yp(f)];disp(nu)enddisp ' 2 回程(余弦加速度运动)'disp ' 凸轮转角理论x 理论y 实际x 实际y'for f=d1:10:d2nu=[f xx(f) yy(f) xp(f) yp(f)];disp(nu)enddisp '*** 凸轮理论轮廓与实际轮廓的向径***'disp ' 1 推程(等加速/等减速运动)'disp ' 凸轮转角理论r 实际r'for f=10:10:ftnu=[f r(f) rp(f)];disp(nu)enddisp ' 'disp ' 2 回程(余弦加速度运动)'for f=d1:10:d2nu=[f r(f) rp(f)];disp(nu)end% (5)---绘制凸轮的理论轮廓和实际轮廓figure(2);plot(xx,yy,'r-.') % 理论轮廓(红色,点划线)axis ([-(rb+h-10) (rb+h+10) -(rb+h+10) (rb+rt+10)]) % 横轴和纵轴的下限和上限axis equal % 横轴和纵轴的尺度比例相同text(rb+h+3,0,'X') % 标注横轴text(0,rb+rt+3,'Y') % 标注纵轴text(-5,5,'O') % 标注直角坐标系原点title('偏置移动从动件盘形凸轮轮廓') % 标注图形标题hold on; % 保持图形plot([-(rb+h) (rb+h)],[0 0],'k') % 横轴(黑色)plot([0 0],[-(rb+h) (rb+rt)],'k') % 纵轴(黑色)plot([e e],[0 (rb+rt)],'k--') % 初始偏置位置(黑色,虚线)ct=linspace(0,2*pi); % 画圆的极角变化范围plot(rb*cos(ct),rb*sin(ct),'g') % 基圆(绿色)plot(e*cos(ct),e*sin(ct),'c--') % 偏距圆(青色,虚线)plot(e + rt*cos(ct),se + rt*sin(ct),'m') % 滚子圆(品红色)plot(xp,yp,'b') % 实际轮廓(蓝色)******** 偏置移动从动件盘形凸轮设计绘图和运动分析********######## 已知条件########凸轮作逆时针方向转动,从动件偏置在凸轮轴心的右边从动件在推程作等加速/等减速运动,在回程作余弦加速度运动基圆半径rb = 40.0000 mm滚子半径rt = 10.0000 mm推杆偏距 e = 15.0000 mm推程升程h = 50.0000 mm推程运动角ft = 100.0000 度远休止角fs = 60.0000 度回程运动角fh = 90.0000 度推程许用压力角alpha_p = 35.0000 度凸轮转速n = 200.0000 r/min凸轮角速度(弧度) w = 20.9440 rad/s凸轮角速度(度) omega = 1200.0000 度/s@@@@@@ 计算过程和输出结果@@@@@@*** 计算凸轮理论轮廓的压力角和曲率半径***1 推程(等加速/等减速运动)推程最大压力角alpha_tm = 34.2666 度对应的位置角ftm = 50.0000 度最小曲率半径rho_tn = 35.2303 mm对应的位置角ftn = 51.0000 度2 回程(余弦加速度运动-简谐运动)回程最大压力角alpha_hm = 30.9248 度对应的位置角fhm = 213.0000 度最小曲率半径rho_hn = 30.3591 mm对应的位置角fhn = 250.0000 度*** 计算凸轮机构从动件的运动参数***1 推程(等加速/等减速运动)凸轮转角位移s(mm) 速度v(mm/s)10 1 24020 4 48030 9 72040 16 96050 25 120060 34 96070 41 72080 46 48090 49 240100 50 0等加速上升的加速度at_1 = 28800.0000 (mm/s^2)等减速上升的加速度at_2 = -28800.0000 (mm/s^2)2 回程(余弦加速度运动-简谐运动)凸轮转角位移s(mm) 速度v(mm/s) 加速度a(mm/s^2) 160 50 673 -33602170 48 358 -41220180 44 0 -43865190 37 -358 -41220200 29 -673 -33602210 21 -907 -21932220 12.5 -1031.3 -7617.1230 5.8 -1031.3 7617.1240 2 -907 21932250 0 -673 33602****** 凸轮理论轮廓与实际轮廓的直角坐标******1 推程(等加速/等减速运动)凸轮转角理论x 理论y 实际x 实际y 10.0000 21.3848 34.8977 18.7440 25.2527 20.0000 28.1459 33.4732 26.5660 23.5988 30.0000 36.0309 32.4073 34.7788 22.4860 40.0000 45.6105 31.0206 43.9004 21.1679 50.0000 57.1986 28.4142 54.4870 18.7889 60.0000 69.0579 22.5501 63.1030 14.5165 70.0000 78.5024 12.6099 70.2060 7.0270 80.0000 84.4235 -0.3453 74.7846 -3.008390.0000 86.0810 -15.0000 76.0894 -14.5890 100.0000 83.1533 -29.8936 73.7429 -26.51052 回程(余弦加速度运动)凸轮转角理论x 理论y 实际x 实际y 160.0000 15.6881 -86.9597 13.9127 -77.1185 170.0000 0.0875 -86.8780 1.9206 -77.0474 180.0000 -15.0000 -81.2321 -9.9808 -72.5829 190.0000 -27.7230 -70.8432 -20.2897 -64.1539 200.0000 -36.8131 -57.2861 -27.8219 -52.9092 210.0000 -41.8603 -42.5041 -32.0770 -40.4336 220.0000 -43.3607 -28.3394 -33.3609 -28.2733 230.0000 -42.5280 -16.1041 -32.6176 -17.4398 240.0000 -40.9188 -6.3040 -31.0634 -7.9985 250.0000 -39.9750 1.4129 -29.9813 1.0597*** 凸轮理论轮廓与实际轮廓的向径***1 推程(等加速/等减速运动)凸轮转角理论r 实际r10.0000 40.9287 31.449020.0000 43.7338 35.533930.0000 48.4609 41.414840.0000 55.1597 48.737350.0000 63.8674 57.635560.0000 72.6465 64.751270.0000 79.5088 70.556880.0000 84.4242 74.845190.0000 87.3781 77.4754100.0000 88.3634 78.36342 回程(余弦加速度运动)160.0000 88.3634 78.3634170.0000 86.8780 77.0714180.0000 82.6054 73.2660190.0000 76.0745 67.2859200.0000 68.0948 59.7783210.0000 59.6564 51.6121220.0000 51.8003 43.7302230.0000 45.4750 36.9872240.0000 41.4015 32.0766250.0000 40.0000 30.0000。
平行分度凸轮机构设计专家系统的开发及三维运动仿真

数 字化 设计
平行分度 凸轮机构设计专家 系统的
开发 及 三维 运 动仿 真
口 天 津工业大 学机械 电子学院 郝彩红 尹明富
平 行分 度 凸轮 机构 是 一 种 较 凸轮的三维设计与仿真 ,目前只有 为复杂 的平面共轭 凸轮机构 ,其运 基 于 V ++ 60 用 O e G 函 数 开 C .调 pn L
维 实 体 , 与 在 P OE G N E 环 境 下 r/ N I E R
二 、计 算和 绘 制 凸轮轮 廓 曲线
在平行分度 凸轮设计 系统 中, 理论轮廓 线、压 力角和实际廓线按
以 下公 式 设 计 。 1凸轮 理 论 工 作廓 面 方 程 为 : .
的 系 统 给 出 了 界 面 友 好 的 参 数输入对话框 。 能 够 完 成 机 构 参 数 的 自 动 综 合
有高转速与高分度精度等优点 ,目 C TA ,其分度凸轮廓面的特殊性 A I等
前 被 广 泛 应 用 于 各 类 自 动 化 机 械 均 不 能 直 接 满 足 设 计 要 求 。 为 了能
产 行 分度 凸轮 机 构 专家 系统 结构框 图
够利用P oE G N E 自带 的仿 真功 r/N I E R 能以及 后续的数控加工功能 ,本文 提 出一种在A t C D u o A 环境 下开发 的 生成 凸轮二维廓 面的系统 ,能够调 入 PoE G N E 环境 生成 凸轮 的三 r/N IE R
、
本 专 家系 统 主 要 由知 识 库 、
2凸 轮 的 压 力 角为 : .
经过处理 而形成 的直纹曲面。如果 推理机 、综合数据库 、方 法库和知 能够在加 工前 ,基 于三维 虚拟设计 识 库管 理 系统 组成 。系 统 结构 如
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
% 共轭分度凸轮机构设计与分析% 相关的函数文件:% 计算凸轮机构运动参数(zhbx_cs.m)% 绘制凸轮机构运动曲线(zhbx_tx.m)% 计算凸轮廓线坐标(zhbx_xyRP.m)% 将凸轮廓线辅坐标转化为动坐标(zhbx_xyRPd.m)disp ' 用键盘输入已知条件:'n=input('凸轮转速(r/min) n = ');C=input('机构中心距(mm) C = ');disp '选择凸轮头数H、转盘分度数I与凸轮分度期转角theta_f的对应关系:'disp ' H=1时,I=6、8、10、12、16,theta_f=60、75、90、120、150度'disp ' H=2时,I=3、4、5、6、8,theta_f=90、120、150、180、210、240、270度' disp ' H=3时,I=2、4,theta_f=150、180、210、240、270度'disp ' H=4时,I=1、2、3,theta_f=180、210、240、270度'H=input('凸轮头数H = ');I=input('转盘分度数I = ');theta_f=input('凸轮分度期转角(度) theta_f = ');% 1-共轭分度凸轮机构运动分析% 凸轮角速度omega_1=pi*n/30;% 转盘滚子数z=H*I;% 凸轮停歇期转角if H<2theta_d=180-theta_f;elsetheta_d=360-theta_f;end% 转盘分度期转位角phi_f=360/I;% 机构分度期时间t_f和停歇期时间t_dhd=pi/180.0; % 角度转换为弧度的系数t_f=theta_f*hd/omega_1;t_d=theta_d*hd/omega_1;% 机构动停比k和运动系数tauk=t_f/t_d;tau=t_f/(t_f+t_d);disp '======== 共轭分度凸轮机构基本数据========'fprintf(' 凸轮转速n = %3.4f r/min \n',n)fprintf(' 机构中心距 C = %3.4f mm \n',C)fprintf(' 凸轮头数H = %3.0f \n',H)fprintf(' 转盘分度数I = %3.0f \n',I)fprintf(' 转盘滚子数z = %3.0f \n',z)fprintf(' 凸轮角速度omega_1 = %3.4f 1/s \n',omega_1)fprintf(' 凸轮分度期转角theta_f = %3.4f 度\n',theta_f)fprintf(' 凸轮停歇期转角theta_d = %3.4f 度\n',theta_d)fprintf(' 转盘分度期转角phi_f = %3.4f 度\n',phi_f)fprintf(' 机构分度期时间t_f = %3.4f s \n',t_f)fprintf(' 机构停歇期时间t_d = %3.4f s \n',t_d)fprintf(' 机构动停比k = %3.4f \n',k)fprintf(' 机构运动系数tau = %3.4f \n',tau)计算结果:======== 共轭分度凸轮机构基本数据========凸轮转速n = 100.0000 r/min机构中心距 C = 100.0000 mm凸轮头数H = 2转盘分度数I = 4转盘滚子数z = 8凸轮角速度omega_1 = 10.4720 1/s凸轮分度期转角theta_f = 180.0000 度凸轮停歇期转角theta_d = 180.0000 度转盘分度期转角phi_f = 90.0000 度机构分度期时间t_f = 0.3000 s机构停歇期时间t_d = 0.3000 s机构动停比k = 1.0000机构运动系数tau = 0.5000% 计算凸轮机构运动参数(调用组合摆线运动M文件:zhbx_cs.m)bc=0.5; % bc是转角分度单位[zhbx,i_zhbx]=zhbx_cs(theta_f,phi_f,hd,omega_1,bc);fprintf(' 组合摆线运动参数数组行数i_zhbx = %3.0f \n',i_zhbx)% 输出共轭分度凸轮机构运动参数[' 凸轮转角',' 转盘角位移',' 角速度',' 角加速度',' 跃度',' 角速度比',' 角加速度比'][zhbx(:,1),zhbx(:,2)/hd,zhbx(:,3),zhbx(:,4),zhbx(:,5),zhbx(:,6),zhbx(:,7)]计算结果:凸轮转角转盘角位移角速度角加速度跃度角速度比角加速度比0 0 0 0 3.5192 0 030.0000 3.8787 0.3345 0.8664 -0.6111 0.0319 0.007960.0000 20.1752 0.7254 0.5655 -2.6959 0.0693 0.005290.0000 45.0000 0.8798 0.0000 -3.5192 0.0840 0.0000120.0000 69.8248 0.7254 -0.5655 -2.6959 0.0693 -0.0052150.0000 86.1213 0.3345 -0.8664 -0.6111 0.0319 -0.0079180.0000 90.0000 0 -0.0000 3.5192 0 -0.0000% 绘制凸轮机构运动曲线(调用组合摆线绘图M文件:zhbx_tx.m)zhbx_tx(zhbx,hd,theta_f)% 备注:绘制的凸轮机构运动曲线形态正常(见图12-9)。
% 2-共轭分度凸轮机构几何尺寸计算disp ' 图12-10:根据机构最大压力角45~60度和转盘滚子数z,确定径距比RpC'disp ' 图12-11:凸轮理论廓线的形成条件,根据theta_f/H和转盘滚子数z,径距比最大允许值(Rp/C)max'disp ' 图12-12:凸轮理论廓线不发生自交,根据转盘分度数I和凸轮分度期转角theta_f度,径距比最大允许值(Rp/C)max'RpC=input('确定径距比RpC = ');% 转盘节圆半径Rp=C*RpC;% 凸轮基圆半径(与转盘节圆半径相切)Rb=C-Rp;% 转盘的基准起始位置角phi_10=180/z;% 凸轮的基准起始向径R_10=sqrt(C^2+Rp^2-2*C*Rp*cos(phi_10*hd));% 凸轮的基准起始位置角theta_10=asin(Rp*sin(phi_10*hd)/R_10);% 转盘滚子中心角phi_z=360/z;% 转盘滚子半径fprintf('转盘滚子半径最小值Rrmin=%3.4f mm \n',round(0.4*Rp*sin(phi_z*hd/2)))fprintf('转盘滚子半径最大值Rrmax=%3.4f mm \n',round(0.6*Rp*sin(phi_z*hd/2)))Rr=input('确定滚子半径(mm) Rr = ');% 转盘滚子宽度fprintf('转盘滚子宽度最小值bmin = %3.4f mm \n',round(1.0*Rr))fprintf('转盘滚子宽度最大值bmax = %3.4f mm \n',round(1.4*Rr))b=input('确定滚子宽度(mm) b = ');% 共轭凸轮安装相位角(前后两片凸轮两条基准起始向径的夹角)if H<2theta_p=pi-theta_f*hd-2*theta_10;elsetheta_p=2*pi-theta_f*hd-2*theta_10;end% 滚子中心Fn0的起始位置角phi_20=360*(1.5-2)/z; % 安装在转盘后侧的2号滚子phi_30=360*(1.5-3)/z; % 安装在转盘前侧的3号滚子phi_40=360*(1.5-4)/z; % 安装在转盘后侧的4号滚子% 滚子中心Fn0到凸轮轴心O1的距离R_20=sqrt(C^2+Rp^2-2*C*Rp*cos(phi_20*hd)); % 安装在转盘后侧的2号滚子R_30=sqrt(C^2+Rp^2-2*C*Rp*cos(phi_30*hd)); % 安装在转盘前侧的3号滚子R_40=sqrt(C^2+Rp^2-2*C*Rp*cos(phi_40*hd)); % 安装在转盘后侧的4号滚子% 滚子中心到凸轮轴心的向径Fn0-O1与凸轮滚子中心的连线O1-O2之间的夹角theta_20=asin(Rp/R_20*sin(phi_20*hd)); % 安装在转盘后侧的2号滚子theta_30=asin(Rp/R_30*sin(phi_30*hd)); % 安装在转盘前侧的3号滚子theta_40=asin(Rp/R_40*sin(phi_40*hd)); % 安装在转盘后侧的4号滚子disp ' ======== 共轭分度凸轮机构几何尺寸========'fprintf('机构径距比RpC = %3.4f \n',RpC)fprintf('凸轮基圆半径Rb = %3.4f mm \n',Rb)fprintf('转盘节圆半径Rp = %3.4f mm \n',Rp)fprintf('转盘滚子半径Rr = %3.4f mm \n',Rr)fprintf('转盘滚子宽度 b = %3.4f mm \n',b)fprintf('滚子中心角phi_z = %3.4f 度\n',phi_z)fprintf('凸轮基准起始向径(F10-O1) R_10 = %3.4f mm \n',R_10)fprintf('滚子中心F20到凸轮中心的距离R_20 = %3.4f mm \n',R_20)fprintf('滚子中心F30到凸轮中心的距离R_30 = %3.4f mm \n',R_30)fprintf('滚子中心F40到凸轮中心的距离R_40 = %3.4f mm \n',R_40)fprintf('转盘基准起始位置角(F10) phi_10 = %3.4f 度\n',phi_10)fprintf('滚子中心F20的起始位置角phi_20 = %3.4f 度\n',phi_20)fprintf('滚子中心F30的起始位置角phi_30 = %3.4f 度\n',phi_30)fprintf('滚子中心F40的起始位置角phi_40 = %3.4f 度\n',phi_40)fprintf('凸轮基准起始位置角(F10) theta_10 = %3.4f 度\n',theta_10/hd) fprintf('滚子中心F20向径与中心连线夹角theta_20 = %3.4f 度\n',theta_20/hd) fprintf('滚子中心F30向径与中心连线夹角theta_30 = %3.4f 度\n',theta_30/hd) fprintf('滚子中心F40向径与中心连线夹角theta_40 = %3.4f 度\n',theta_40/hd) fprintf('共轭凸轮安装相位角theta_p = %3.4f 度\n',theta_p/hd)计算结果:======== 共轭分度凸轮机构几何尺寸========机构径距比RpC = 0.4600凸轮基圆半径Rb = 54.0000 mm转盘节圆半径Rp = 46.0000 mm转盘滚子半径Rr = 10.0000 mm转盘滚子宽度 b = 12.0000 mm滚子中心角phi_z = 45.0000 度凸轮基准起始向径(F10-O1) R_10 = 60.1357 mm滚子中心F20到凸轮中心的距离R_20 = 60.1357 mm滚子中心F30到凸轮中心的距离R_30 = 92.7109 mm滚子中心F40到凸轮中心的距离R_40 = 125.0467 mm转盘基准起始位置角(F10) phi_10 = 22.5000 度滚子中心F20的起始位置角phi_20 = -22.5000 度滚子中心F30的起始位置角phi_30 = -67.5000 度滚子中心F40的起始位置角phi_40 = -112.5000 度凸轮基准起始位置角(F10) theta_10 = 17.0214 度滚子中心F20向径与中心连线夹角theta_20 = -17.0214 度滚子中心F30向径与中心连线夹角theta_30 = -27.2838 度滚子中心F40向径与中心连线夹角theta_40 = -19.8684 度共轭凸轮安装相位角theta_p = 145.9573 度% 3-共轭分度凸轮廓线计算% 1)与1号滚子相啮合的凸轮廓线坐标% 计算理论廓线辅助角lambda_10=atan2((C*cos(phi_10*hd)-Rp),(C*sin(phi_10*hd)));lambda=lambda_10;phi=phi_10;% 变量初始化alpha=zeros(i_zhbx,1);phii=zeros(i_zhbx,1);xt=zeros(i_zhbx,1);yt=zeros(i_zhbx,1);xk=zeros(i_zhbx,1);yk=zeros(i_zhbx,1);Rt=zeros(i_zhbx,1);Pt=zeros(i_zhbx,1);Rk=zeros(i_zhbx,1);Pk=zeros(i_zhbx,1);% 计算凸轮廓线坐标(调用计算凸轮廓线坐标M文件:zhbx_xyRP.m)[alpha,phii,xt,yt,xk,yk,Rt,Pt,Rk,Pk]=zhbx_xyRP(lambda,phi,zhbx,C,Rp,Rr,hd,i_zhbx);% 变量代换alpha_10=alpha;phii_1=phii;xt_1=xt;yt_1=yt;xk_1=xk;yk_1=yk;Rt_1=Rt;Pt_1=Pt;Rk_1=Rk;Pk_1=Pk;% 输出计算结果:fprintf(' 凸轮理论廓线计算辅助角lambda_10 = %3.4f 度\n',lambda_10/hd) disp ' ===== 与1号滚子相啮合的凸轮理论廓线和工作廓线的直角坐标和极坐标====='[' 凸轮转角',' xt_1',' {理论} yt_1',' xk_1', ' {工作} yk_1',' Rt_1',' {理论} Pt_1',' Rk_1', ' {工作} Pk_1'][zhbx(:,1),xt_1,yt_1,xk_1,yk_1,Rt_1,Pt_1/hd,Rk_1,Pk_1/hd]计算结果:凸轮理论廓线计算辅助角lambda_10 = 50.4786 度===== 与1号滚子相啮合的凸轮理论廓线和工作廓线的直角坐标和极坐标=====凸轮转角xt_1 {理论} yt_1 xk_1 {工作} yk_1 Rt_1 {理论} Pt_1 Rk_1 {工作} Pk_10 60.1357 -0.0000 50.1357 -0.0000 60.1357 -0.0000 50.1357 -0.000030.0000 55.0310 29.0779 46.1106 24.5583 62.2409 27.8516 52.2427 28.039560.0000 45.2475 57.4870 38.7456 49.8892 73.1580 51.7940 63.1677 52.165990.0000 16.5170 91.2277 14.3300 81.4698 92.7109 79.7376 82.7205 80.0241120.0000 -43.1924 103.0709 -39.5608 93.7536 111.7550 112.7364 101.7585112.8781150.0000 -101.9683 68.2359 -93.7089 62.5983 122.6934 146.2101 112.6938 146.2567180.0000 -124.8924 6.2110 -114.9047 5.7143 125.0467 177.1530 115.0467 177.1530% 2)与3号滚子相啮合的凸轮廓线坐标% 在辅助坐标系O1x'y'(x'轴与动坐标系x轴的夹角是:theta_10+theta_30)中计算% 计算理论廓线辅助角lambda_30=atan2((C*cos(phi_30*hd)-Rp),(C*sin(phi_30*hd)));lambda=lambda_30;phi=phi_30;% 变量初始化alpha=zeros(i_zhbx,1);phii=zeros(i_zhbx,1);xt=zeros(i_zhbx,1);yt=zeros(i_zhbx,1);xk=zeros(i_zhbx,1);yk=zeros(i_zhbx,1);Rt=zeros(i_zhbx,1);Pt=zeros(i_zhbx,1);Rk=zeros(i_zhbx,1);Pk=zeros(i_zhbx,1);% 计算凸轮廓线坐标(调用计算凸轮廓线坐标M文件:zhbx_xyRP.m)[alpha,phii,xt,yt,xk,yk,Rt,Pt,Rk,Pk]=zhbx_xyRP(lambda,phi,zhbx,C,Rp,Rr,hd,i_zhbx);% 变量代换(辅助动坐标系O1x'y'中的坐标用_p标识)alpha_p=alpha;phii_p=phii;xt_p=xt;yt_p=yt;xk_p=xk;yk_p=yk;Rt_p=Rt;Pt_p=Pt;Rk_p=Rk;Pk_p=Pk;% 输出计算结果:fprintf(' 凸轮理论廓线计算辅助角lambda_30 = %3.4f 度\n',lambda_30/hd)disp ' ===== 与3号滚子相啮合的凸轮理论廓线和工作廓线的辅助动坐标系坐标====='[' 凸轮转角',' xt_p',' {理论} yt_p',' xk_p', ' {工作} yk_p',' Rt_p',' {理论} Pt_p',' Rk_p', ' {工作} Pk_p'][zhbx(:,1),xt_p,yt_p,xk_p,yk_p,Rt_p,Pt_p/hd,Rk_p,Pk_p/hd]计算结果:凸轮理论廓线计算辅助角lambda_30 = -175.2162 度===== 与3号滚子相啮合的凸轮理论廓线和工作廓线的辅助动坐标系坐标=====凸轮转角xt_p {理论} yt_p xk_p {工作} yk_p Rt_p {理论} Pt_p Rk_p {工作} Pk_p0 92.7109 0.0000 82.7109 0.0000 92.7109 0.0000 82.7109 0.000030.0000 77.5197 44.9344 68.9515 39.7784 89.6014 30.0988 79.6029 29.980860.0000 39.6229 65.6497 34.8047 56.8870 76.6802 58.8869 66.6895 58.540890.0000 10.7136 59.1737 9.3567 49.2662 60.1357 79.7376 50.1468 79.2464120.0000 -0.6970 54.0656 -0.6151 44.0659 54.0701 90.7386 44.0702 90.7997150.0000 -18.1293 55.3981 -15.1534 45.8512 58.2891 108.1209 48.2903 108.2883180.0000 -43.0350 42.0036 -35.8787 35.0188 60.1357 135.6949 50.1357 135.6949% 检查与3号滚子相啮合的凸轮廓线之间区段的压力角figure(3);plot(zhbx(:,1),alpha_p/hd)title('与3号滚子相啮合凸轮廓线区段的压力角变化线图') % 标注图形标题grid;xlabel('凸轮转角\theta (^。