凸轮机构设计大作业
机械原理大作业二凸轮(完整版) 20
Harbin Institute of Technology机械原理大作业二作业名称:凸轮机构设计设计题目: 20 院系:机电工程学院班级:设计者:学号:指导教师:**设计时间: 2014年5月哈尔滨工业大学一、设计题目如图1所示直动从动件盘形凸轮机构,其原始参数见表1。
表1 凸轮机构参数升程/h mm 升程运动角 0/ϕ 升程运动规律 升程许用压力角[]/α 回程运动角 0/ϕ'回程运动规律 回城许用压力角[]/α'远休止角/s ϕ 近休止角/s ϕ' 110 120 正弦加速度 3590 正弦加速度 65 50 100二、运动方程式及运动线图本实验假设凸轮逆时针旋转。
1.确定凸轮机构推杆升程、回程运动方程(ϕ为凸轮转角,ω为凸轮角速度)。
推程(余弦加速度)(203ϕπ≤≤): 图1远休止段:当21738πϕπ≤≤时,110s h==,0v=,0a=回程(正弦加速度)(171389πϕπ≤≤):近休止段:当1329πϕπ≤≤时,0s=,0v=,0a=2.绘制推杆位移、速度、加速度线图图2三、绘制凸轮机构的ds s d ϕ-线图,并由此确定凸轮的基圆半径和偏距图3图4如图3、图4所示,在ds d ϕ轴正侧(对应于推程),以tan(90[])α-为斜率做ds s d ϕ-曲线的切线1L ,在ds d ϕ轴负侧(对应于回程),以tan(90[])α'+为斜率做ds s d ϕ-曲线的切线2L ,再过点(0,0)O 做斜率为tan(90[])α+的直线3L ,则直线1L 、2L 、3L 与s 轴的夹角分别为[]α、[]α'、[]α。
显然,1L 、2L 、3L 三条直线下方的公共部分即为满足推程压力角不超过[]α和回程压力角不超过[]α'时,凸轮回转中心的可取区域。
记直线1L 与2L 的交点为12P ,直线1L 与3L 的交点为13P ,则最小基圆半径013r OP ==45.79mm ,对应的偏距e =26.27mm (点13P 到s 轴的距离),2200s r e =-=37.51mm 。
机械原理大作业凸轮结构设计
机械原理大作业(二) 作业名称:机械原理设计题目:凸轮机构设计院系: 机电工程学院班级:设计者:学号:指导教师:丁刚陈明设计时间:哈尔滨工业大学机械设计1、设计题目如图所示直动从动件盘形凸轮机构,根据其原始参数设计该凸轮。
表一:凸轮机构原始参数序号升程(mm) 升程运动角(º)升程运动规律升程许用压力角(º)回程运动角(º)回程运动规律回程许用压力角(º)远休止角(º)近休止角(º)12 80 150正弦加速度30 100 正弦加速度60 60 502、凸轮推杆运动规律(1)推杆升程运动方程S=h[φ/Φ0-sin(2πφ/Φ0)]V=hω1/Φ0[1-cos(2πφ/Φ0)]a=2πhω12sin(2πφ/Φ0)/Φ02式中:h=150,Φ0=5π/6,0<=φ<=Φ0,ω1=1(为方便计算)(2)推杆回程运动方程S=h[1-T/Φ1+sin(2πT/Φ1)/2π]V= -hω1/Φ1[1-cos(2πT/Φ1)]a=-2πhω12sin(2πT/Φ1)/Φ12式中:h=150,Φ1=5π/9,7π/6<=φ<=31π/18,T=φ-7π/63、运动线图及凸轮线图运动线图:用Matlab编程所得源程序如下:t=0:pi/500:2*pi;w1=1;h=150;leng=length(t);for m=1:leng;if t(m)<=5*pi/6S(m) = h*(t(m)/(5*pi/6)-sin(2*pi*t(m)/(5*pi/6))/(2*pi));v(m)=h*w1*(1-cos(2*pi*t(m)/(5*pi/6)))/(5*pi/6);a(m)=2*h*w1*w1*sin(2*pi*t(m)/(5*pi/6))/((5*pi/6)*(5*pi/6));% 求退程位移,速度,加速度elseift(m)<=7*pi/6S(m)=h;v(m)=0;a(m)=0;% 求远休止位移,速度,加速度elseif t(m)<=31*pi/18T(m)=t(m)-21*pi/18;S(m)=h*(1-T(m)/(5*pi/9)+sin(2*pi*T(m)/(5*pi/9))/(2*pi));v(m)=-h/(5*pi/9)*(1-cos(2*pi*T(m)/(5*pi/9)));a(m)=-2*pi*h/(5*pi/9)^2*sin(2*pi*T(m)/(5*pi/9));%求回程位移,速度,加速度elseS(m)=0;v(m)=0;a(m)=0;% 求近休止位移,速度,加速度endend推杆位移图推杆速度图推杆加速度图4、确定凸轮基圆半径与偏距在凸轮机构得ds/dφ-s线图里再作斜直线Dt dt与升程得[ds/dφ-s(φ)]曲线相切并使与纵坐标夹角为升程许用压力角[α],则D t d t线得右下方为选择凸轮轴心得许用区。
凸轮机构大作业..
机械原理大作业凸轮机构设计(题号:3-A)学院:机电工程学院目录(一)设计题目及数据(二)推杆运动规律及凸轮廓线方程(三)程序框图(四)计算源程序(五)凸轮机构图(廓线)(六)设计心得及体会(七)参考文献一、设计题目及数据试用计算机辅助设计完成摆动滚子推杆盘形凸轮机构的设计(1)推程运动规律为正弦加速度运动,回程运动规律为等加速等减速运动;(2)打印出原始数据;(3)打印出理论轮廓和实际轮廓的坐标值;(4)打印出推程和回程的最大压力角,以及出现最大压力角时凸轮的相应转角;(5)打印出凸轮实际轮廓曲线的最小曲率半径,以及相应的凸轮转角;(6)打印最后所确定的凸轮的基圆半径。
表一 摆动滚子推杆盘形凸轮机构的已知参数题号 初选的基圆半径R0/mm偏距/mm推杆行程/m m 滚子半径Rr/m m 许用压力角 许用最小曲率半径[ρamin] [α1] [α2] 3-A 15 5 28 10 30˚ 70˚ 0.3Rr计算点数:N=120q1=60; 近休止角δ1q2=120; 推程运动角δ2q3=90; 远休止角δ3q4=90; 回程运动角δ4二、运动规律:1.推程运动规律:正弦加速度运动00=[(/)-sin(2/)/2]S h δδπδδπ2.回程运动规律:等加速等减速运动:2''20=-2/S h h δδ ('0=0-/2S δ)'2'200=2h(-)/S δδδ3近休凸轮转角0°- 60°,推程凸轮转角60°-180°,远休凸轮转角180°-270°二、推杆运动规律及凸轮廓线方程推杆运动规律:(1)近休阶段:0o ≤δ<60 oX L =R L cos (m α-δ) Y L =R L cos (mα-δ) Xs=R 0cos(m α-δ) Y L =R L sin (mα-δ) 其中m α=arctan 220()r e R R e ++ R L= R 0+R r(2)推程阶段:60o ≤δ<180 oX L =R n cos (1αα-) Y L =R n sin (1αα-)1=(R -R )cos(-)s n r X αα 1=(R -R )sin(-)s n r Y αα 22R =(l+s)-e n 220R=(R +R )-e r 1=arccos n e R α 00=[(/)-sin(2/)/2]S h δδπδδπ(3)远休阶段:180o ≤δ<270 oR max=最大的R n max maxarccos e R α= Xs=R max *cos (max αα-) Y L =R max *sin (max αα-)Xs=(R max -10)*cos (max αα-) Ys=(R max -10)*cos (1αα-)(4)回程阶段:270≤δ<360S=h-2h 2'20/δδ S=2h (三、压力角的求法可由220tan [(/]/[ds d e R e αδ=--+s ]求出推程和回程各自的一组值,然后找出推程和回程里各自最大的压力角,然后与[1α] [2α]相比较,若不小于[1α]和[2α]应该改变R 0再重新求压力角直到满足条件为止,最后再求出相应的凸轮转角δ。
机械原理大作业凸轮机构设计
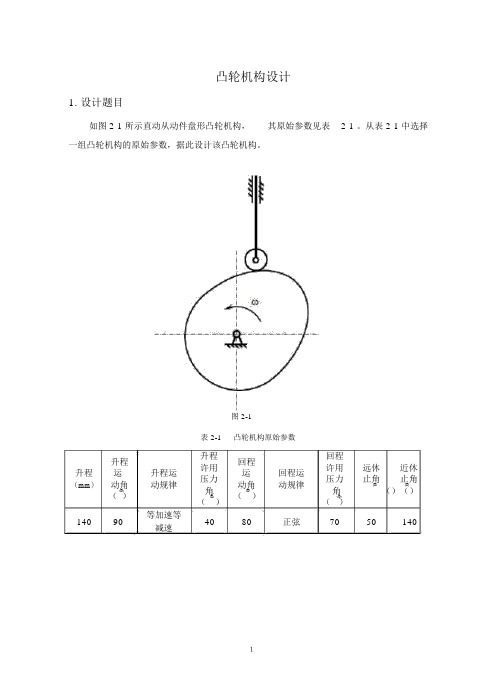
凸轮机构设计1.设计题目如图 2-1 所示直动从动件盘形凸轮机构,其原始参数见表2-1 。
从表 2-1 中选择一组凸轮机构的原始参数,据此设计该凸轮机构。
图 2-1表 2-1凸轮机构原始参数升程升程回程回程许用许用远休近休升程运升程运运回程运压力压力止角止角(mm)动角动规律动角动规律角角()()()()()()14090等加速等4080正弦7050140减速2.凸轮机构的设计要求(1)确定凸轮推杆升程、回程运动方程,并绘制推杆位移、速度、加速度线图;【1】确定推杆的升程回程运动方程对于不同运动规律的凸轮结构,其上升与下降的方式不一,但遵循同样的运动顺序:上升、远休止点恒定、下降、近休止点恒定。
因此设计它仅需确定这四个阶段的角度与位置即可。
推程阶段:1120s22回程阶段:v22401222402a1⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯2s1120(2)21402v2240 1 (2)222402a1⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯2(97)sin(97)s140[1422]23151[1cos(97)]v22(0)4()422835 12 sin(97)711a222⋯⋯⋯⋯⋯ ()99【 2】绘制推杆位移、速度、加速度线图①位移图像程序:i1=(0:0.01:(1/4)*pi);s1=280.*(((2/pi).*i1).^2);i2=((1/4)*pi:0.01:(1/2)*pi);s2=140-1120.*(((pi/2)-i2).^2)/((pi).^2);i3=((1/2)*pi:0.01:(7/9)*pi);s3=140;i4=((7/9)*pi:0.01:(11/9)*pi);s4=140.*(1-((9.*i4-7*pi)/(4*pi))+sin(((9.*i4)-(7*pi))./2)/(2*pi)); i5=((11/9)*pi:0.01:2*pi);s5=0;plot(i1,s1,'b',i2,s2,'b',i3,s3,'b',i4,s4,'b',i5,s5,'b')位移图像②速度图像程序令1 1 则可以得到速度图像的程序i1=(0:0.01:(1/4)*pi);v1=(2240.*i1)/((pi).^2);i2=((1/4)*pi:0.01:(1/2)*pi);v2=(2240.*((pi/2)-i2))/((pi).^2);i3=((1/2)*pi:0.01:(7/9)*pi);v3=0;i4=((7/9)*pi:0.01:(11/9)*pi);v4=-315.*(1-cos(((9.*i4)-(7*pi))./2))/(pi);i5=((11/9)*pi:0.01:2*pi);v5=0;plot(i1,v1,'b',i2,v2,'b',i3,v3,'b',i4,v4,'b',i5,v5,'b')速度图像③加速度程序及其图像a1=2240/((pi).^2);i2=((1/4)*pi:0.01:(1/2)*pi);a2=-2240/((pi).^2);i3=((1/2)*pi:0.01:(7/9)*pi);a3=0;i4=((7/9)*pi:0.01:(11/9)*pi);a4=-2835.*sin(((9*i4)-(7*pi))/2)/(2*pi);i5=((11/9)*pi:0.01:2*pi);a5=0;plot(i1,a1,'b',i2,a2,'b',i3,a3,'b',i4,a4,'b',i5,a5,'b')加速度图像【3】绘制凸轮机构的dss 线图 di1=(0:0.01:(1/4)*pi);s1=(1120.*(i1.^2))/(pi.^2);i2=((1/4)*pi:0.01:(1/2)*pi);ds2=1120/pi-(2240.*i2)/(pi.^2);s2=140-1120.*(((pi/2)-i2).^2)/((pi).^2);i3=((1/2)*pi:0.01:(7/9)*pi);ds3=i3-i3;s3=140+i3-i3;i4=((7/9)*pi:0.01:(11/9)*pi);ds4=(315/pi).*(-1+cos(((9.*i4)-(7.*pi))/2));s4=140.*(1-((9.*i4-7*pi)/(4*pi))+sin(((9.*i4)-(7*pi))./2)/(2*pi)); i5=((11/9)*pi:0.01:2*pi);s5=i5-i5;ds5=i5-i5;plot(ds1,s1,ds2,s2,ds3,s3,ds4,s4,ds5,s5,)凸轮机构的【4】确定凸轮基圆半径和偏距d ssd线图由图像可知道凸轮的轴心应该在公共区以下凸轮偏心距取 e 3mm ,s0200mm【 5】凸轮的理论轮廓i1=(0:0.01:(1/4)*pi);x1=(200+280.*(((2/pi).*i1).^2)).*cos(i1)-3.*sin(i1);y1=(200+280.*(((2/pi).*i1).^2)).*sin(i1)+3.*cos(i1);i2=((1/4)*pi:0.01:(1/2)*pi);x2=(200+140-1120.*(((pi/2)-i2).^2)/((pi).^2)).*cos(i2)-3.*sin(i2); y2=(200+140-1120.*(((pi/2)-i2).^2)/((pi).^2)).*sin(i2)+3.*cos(i2); i3=((1/2)*pi:0.01:(7/9)*pi);x3=340.*cos(i3)-3.*sin(i3);y3=340.*sin(i3)+3.*cos(i3);i4=((7/9)*pi:0.01:(11/9)*pi);x4=(200+140.*(1-((9.*i4-7*pi)/(4*pi))+sin(((9.*i4)-(7*pi))./2)/(2*pi))). *cos(i4)-3.*sin(i4);y4=(200+140.*(1-((9.*i4-7*pi)/(4*pi))+sin(((9.*i4)-(7*pi))./2)/(2*pi))). *sin(i4)+3.*cos(i4);i5=((11/9)*pi:0.01:2*pi);x5=200.*cos(i5)-3.*sin(i5);y5=200.*sin(i5)+3.*cos(i5);plot(x1,y1,x2,y2,x3,y3,x4,y4,x5,y5)凸轮的理论轮廓【 6】确定滚子半径的程序v=[];syms i1 i2 i3 i4 i5s0 = 200;e = 20;s1=280*(((2/pi)*i1).^2);t1 = (s1 + s0)*cos(i1)-e*sin(i1);y1 = (s0 + s1)*sin(i1) - e*cos(i1);ti1=diff(t1,i1);tii1=diff(t1,i1,2);yi1=diff(y1,i1);yii1=diff(y1,i1,2);for ii1=(0:0.01:(1/4)*pi);k1=subs(abs((ti1*yii1-tii1*yi1)/(ti1^2+yi1^2)^1.5),{i1},{ii1});v=[v,1/k1];ends2=140-1120.*(((pi/2)-i2).^2)/((pi).^2);t2= (s2 + s0)*cos(i2)-e*sin(i2);y2 = (s0 + s2)*sin(i2) - e*cos(i2);ti2=diff(t2,i2);tii2=diff(t2,i2,2);yi2=diff(y2,i2);yii2=diff(y2,i2,2);for ii2=((1/4)*pi:0.01:(1/2)*pi);k2=subs(abs((ti2*yii2-tii2*yi2)/(ti2^2+yi2^2)^1.5),{i2},{ii2});v=[v,1/k2];ends3=140;t3 = (s3 + s0)*cos(i3)-e*sin(i3);y3 = (s0 + s3)*sin(i3) - e*cos(i3);ti3=diff(t3,i3);tii3=diff(t3,i3,2);yi3=diff(y3,i3);yii3=diff(y3,i3,2);for ii3=((1/2)*pi:0.01:(7/9)*pi);k3=subs(abs((ti3*yii3-tii3*yi3)/(ti3^2+yi3^2)^1.5),{i3},{ii3});v=[v,1/k3];ends4=140.*(1-((9.*i4-7*pi)/(4*pi))+sin(((9.*i4)-(7*pi))./2)/(2*pi)); t4 = (s4 + s0)*cos(i4)-e*sin(i4);y4 = (s0 + s4)*sin(i4) - e*cos(i4);ti4=diff(t4,i4);tii4=diff(t4,i4,2);yi4=diff(y4,i4);yii4=diff(y4,i4,2);for ii4=((7/9)*pi:0.01:(11/9)*pi);k4=subs(abs((ti4*yii4-tii4*yi4)/(ti4^2+yi4^2)^1.5),{i4},{ii4});v=[v,1/k4];Ends5=0;t5 = (s5 + s0)*cos(i5)-e*sin(i5);y4 = (s0 + s5)*sin(i5) - e*cos(i5);ti5=diff(t5,i5);tii5=diff(t5,i5,2);yi5=diff(y5,i5);yii5=diff(y5,i5,2);for ii5=((11/9)*pi:0.01:2*pi);k5=subs(abs((ti5*yii5-tii5*yi5)/(ti5^2+yi5^2)^1.5),{i5},{ii5});v=[v,1/k5];endmin(v)确定之后发现滚子半径是r 2mm【 7】确定凸轮的实际轮廓凸轮的实际轮廓x1=(200+280.*(((2/pi).*i1).^2)).*cos(i1)-3.*sin(i1);y1=(200+280.*(((2/pi).*i1).^2)).*sin(i1)+3.*cos(i1);i2=((1/4)*pi:0.01:(1/2)*pi);x2=(200+140-1120.*(((pi/2)-i2).^2)/((pi).^2)).*cos(i2)-3.*sin(i2); y2=(200+140-1120.*(((pi/2)-i2).^2)/((pi).^2)).*sin(i2)+3.*cos(i2);i3=((1/2)*pi:0.01:(7/9)*pi);x3=340.*cos(i3)-3.*sin(i3);y3=340.*sin(i3)+3.*cos(i3);i4=((7/9)*pi:0.01:(11/9)*pi);x4=(200+140.*(1-((9.*i4-7*pi)/(4*pi))+sin(((9.*i4)-(7*pi))./2)/(2*pi))).*cos(i4)-3.*sin(i4);y4=(200+140.*(1-((9.*i4-7*pi)/(4*pi))+sin(((9.*i4)-(7*pi))./2)/(2*pi))).*sin(i4)+3.*cos(i4);i5=((11/9)*pi:0.01:2*pi);x5=200.*cos(i5)-3.*sin(i5);y5=200.*sin(i5)+3.*cos(i5);dx1=(2240.*i1.*cos(i1))/((pi).^2)+(200+1120.*((i1).^2)/((pi).^2)).*sin(i 1)-3.*cos(i1);dy1=(2240.*i1.*sin(i1))-(200+1120.*((i1).^2)/((pi).^2)).*cos(i1)-3.*sin( i1);dx2=(-(1120.*(2.*i2-pi).*cos(i2)/((pi).^2)))-(340-1120.*((2.*i2-pi).^2)) .*sin(i2)-3.*cos(i2);dy2=-(1120.*(2.*i2-pi).*sin(i2)/((pi).^2))+(340-1120.*((2.*i2-pi).^2)).* cos(i2)-3.*sin(i2);dx3=-340.*sin(i3)-3.*cos(i3);dy3=340.*cos(i3)-3.*sin(i3);dx4=((-315/pi)+630.*cos((9.*i4-7.*pi)/2)).*cos(i4)-(200+140.*(1-((9.*i4-7*pi)/(4*pi))+sin(((9.*i4)-(7*pi))./2)/(2*pi))).*sin(i4)-3.*cos(i4);dy4=((-315/pi)+630.*cos((9.*i4-7.*pi)/2)).*sin(i4)+(200+140.*(1-((9.*i4-7*pi)/(4*pi))+sin(((9.*i4)-(7*pi))./2)/(2*pi))).*cos(i4)-3.*sin(i4);dx5=-200.*sin(i5)-3.*cos(i5);dy5=200.*cos(i5)-3.*sin(i5);X1=x1+3.*dy1/sqrt(dy1.^2+dx1.^2);Y1=y1-3.*dx1/sqrt(dy1.^2+dx1.^2);X2=x2+3.*dy2/sqrt(dy2.^2+dx2.^2);Y2=y2-3.*dx2/sqrt(dy2.^2+dx2.^2);X3=x3+3.*dy3/sqrt(dy3.^2+dx3.^2);Y3=y3-3.*dx3/sqrt(dy3.^2+dx3.^2);X4=x4+3.*dy4/sqrt(dy4.^2+dx4.^2);Y4=y4-3.*dx4/sqrt(dy4.^2+dx4.^2);X5=x5+3.*dy5/sqrt(dy5.^2+dx5.^2);Y5=y5-3.*dx5/sqrt(dy5.^2+dx5.^2);plot(X1,Y1,X2,Y2,X3,Y3,X4,Y4,X5,Y5)。
机械原理大作业2_凸轮机构设计

机械原理⼤作业2_凸轮机构设计1. 设计题⽬第32题:升程/mm 升程运动⾓/。
升程运动规律升程许⽤压⼒⾓/。
回程运动⾓/。
回程运动规律回城许⽤压⼒⾓/。
远休⽌⾓/。
近休⽌⾓/。
150120余弦加速度 35 90 正弦加速度65 55 952.运动⽅程式及运动线图本实验假设凸轮逆时针旋转。
(1)确定凸轮机构推杆升程、回程运动⽅程,并绘制推杆位移、速度、加速度线图。
(设定⾓速度为ω= 2π/3.)升程:( 0 <φ< 2π/3)由公式:;v =πh ω/(2)sin(); a = /(2) cos().由此得:s = 75*(1 - cos(1.5*φ));v=0.225/2 * ω * sin(1.5 *φ); a = 0.675/4 *φ^2 .* cos(1.5*φ);回程:( 35*π/36 <φ< 53*π/36)由公式 s = h[1 – T/ + 1/2πsin(2πT/)];v = - h ω/[1 –cos(2πT/)];a = -2πh sin(2πT/) ; T = φ–()得到s= 0.150*(53/18 - 2*φ/π + 1/(2*π)*sin (4*φ- 35* π/9)); v = -0.300/π * ω* (1 - cos(4*φ- 35*π/9)); a = -1.200 *φ^2/π*sin(4*φ- 35*π/9);由上述公式通过编程得到位移、速度、加速度曲线如下:(编程见附录)1. 凸轮机构的sd ds-?线图及基圆半径和偏距的确定2.凸轮机构的s d ds-?线图如下图所⽰(代码详见附录):确定凸轮基圆半径与偏距:见下页:基圆半径为r 0 = 142mm ,偏距e = 20mm 。
3. 滚⼦半径的确定及凸轮理论廓线和实际廓线的绘制得到的理论轮廓曲线为:求其最⼩曲率半径 = 90.0051= 10mm。
这⾥取半径为 rr程序代码见附录3.凸轮轮廓绘制得到的外包络轮廓,得到图线为:得到的内包络线图为:这⾥取内包络线图。
学士学位论文—-机械原理大作业二凸轮机构设计

H a r b i n I n s t i t u t e o f T e c h n o l o g y机械原理大作业(二)作业名称:凸轮机构设计作业题号:06院系:机械设计制造及其自动化班级:班姓名:学号:指导教师:一、设计题目图示直动从动件盘形凸轮机构,选择一组凸轮机的原始参数,据此设计该凸轮机构。
序号升程升程运动角升程运动规律升程许用压力角回程运动角回程运动规律回程许用压力角远休止角近休止角06 60mm 150°正弦加速度30°100°等减加速60°50°60°二、凸轮推杆升程、回程运动方程(设定角速度为ω=10 rad/s)1、推程0< Φ < 5pi/6:s=60·[6Φ/5pi-s in(12Φ/5)/2pi];v=360/5pi·[1-cos(12/5Φ)];a=864/5pi·cos(12/5pi);2、远休止5pi/6< Φ < 10pi/9:s=60;v=0;a=0;3、回程9pi/10< Φ < 25pi/18:s=60-1944/pi2 (Φ– 10pi/9)2 ;v= –3888ω1/pi2 [Φ– 10pi/9];a=–3888ω1 2 /pi225pi/18< Φ < 5pi/3:s=1944/pi2 [2pi/3 –Φ]2v= –3888ω1/pi2 [2pi/3–Φ];a=3888ω1 2 /pi24、近休止5pi/3< Φ < 2pi:s=0;v=0;a=0;二、推杆位移、速度、加速度图1、推杆位移曲线代码:%推拉位移曲线;x=0:(pi/1000):(5*pi/6);s1=60*(1.2*x/pi-sin(2.4*x)/(2*pi));y=(5*pi/6):(pi/1000):(10*pi/9);s2=60;z=(10*pi/9):(pi/1000):(25*pi/18);s3=60-388.8*(z-10*pi/9).^2/(pi*pi);m=(25*pi/18):(pi/1000):(5*pi/3);s4=388.8*(5*pi/3-m).*(5*pi/3-m)/(pi*pi);n=(5*pi/3):(pi/1000):(2*pi);s5=0;plot(x,s1,'b',y,s2,'b',z,s3,'b',m,s4,'b',n,s5, 'b'); xlabel('角度(rad)');ylabel('行程(mm)');title('推杆位移曲线');grid;推杆位移图2、推杆速度曲线代码:%推杆速度曲线;w=1;x=0:(pi/1000):(5*pi/6);v1=72*(1-cos(2.4*x))/pi;y=(5*pi/6):(pi/1000):(10*pi/9);v2=0;z=(10*pi/9):(pi/1000):(25*pi/18);v3=-777.6*w*(z-10*pi/9)/(pi*pi);m=(25*pi/18):(pi/1000):(5*pi/3);v4=-777.6*w*(5*pi/3-m)/(pi*pi);n=(5*pi/3):(pi/1000):(2*pi);v5=0;plot(x,v1,'r',y,v2,'r',z,v3,'r',m,v4,'r',n,v5, 'r'); xlabel('角度(rad)');ylabel('速度(mm/s)');title('推杆速度曲线(w=1rad/s)');grid;推杆速度图3、推杆加速度曲线代码:%凸轮推杆加速度曲线;w=1;x=0:(pi/1000):(5*pi/6);a1=172.8*w*w*sin(2.4*x)/pi;y=(5*pi/6):(pi/1000):(10*pi/9);a2=0;z=(10*pi/9):(pi/1000):(25*pi/18);a3=-777.6*w^2/(pi^2);m=(25*pi/18):(pi/1000):(5*pi/3);a4=777.6*w^2/(pi^2);n=(5*pi/3):(pi/1000):(2*pi);a5=0;plot(x,a1,'m',y,a2,'m',z,a3,'m',m,a4,'m',n,a5, 'm'); xlabel('角度(rad)');ylabel('加速度(mm/s^2)');title('凸轮推杆加速度曲线(w=1rad/s)');grid;推杆加速度图三、绘制凸轮机构/−线图代码:x=0:(pi/1000):(5*pi/6);s1=60*(1.2*x/pi-sin(2.4*x)/(2*pi));ns1=72*(1-cos(2.4*x))/pi;y=(5*pi/6):(pi/1000):(10*pi/9);s2=60;ns2=0;z=(10*pi/9):(pi/1000):(25*pi/18);s3=60-388.8*(z-10*pi/9).^2/(pi*pi);ns3=-777.6*w*(z-10*pi/9)/(pi*pi);m=(25*pi/18):(pi/1000):(5*pi/3);s4=388.8*(5*pi/3-m).*(5*pi/3-m)/(pi*pi);ns4=-777.6*w*(5*pi/3-m)/(pi*pi);n=(5*pi/3):(pi/1000):(2*pi);s5=0;ns5=0;xlabel('ds/dψ');ylabel('s');plot(ns1,s1,ns2,s2,ns3,s3,ns4,s4,ns5,s5); title('凸轮机构图');grid四、并依次确定凸轮机构的基圆半径和偏距代码:x=0:(pi/1000):(5*pi/6);s1=60*(1.2*x/pi-sin(2.4*x)/(2*pi));ns1=72*(1-cos(2.4*x))/pi;y=(5*pi/6):(pi/1000):(10*pi/9);s2=60;ns2=0;z=(10*pi/9):(pi/1000):(25*pi/18);s3=60-388.8*(z-10*pi/9).^2/(pi*pi);ns3=-777.6*w*(z-10*pi/9)/(pi*pi);m=(25*pi/18):(pi/1000):(5*pi/3);s4=388.8*(5*pi/3-m).*(5*pi/3-m)/(pi*pi);ns4=-777.6*w*(5*pi/3-m)/(pi*pi);n=(5*pi/3):(pi/1000):(2*pi);s5=0;ns5=0;j1=diff(ns1);k1=diff(s1);q1=k1./j1;q2=tan(60*pi/180);on1=find(abs(q1-q2)<0.014)s1x=s1(on1);ns1x=ns1(on1);j2=diff(ns4);k2=diff(s4);p1=k2./j2;p2=-tan(30*pi/180);on2=find(abs(p1-p2)<0.00157)s4x=s4(on2);ns4x=ns4(on2);x1=-80:0.001:60;y1=tan(pi/3)*(x1-ns1x)+s1x;x2=-80:0.001:80;y2=tan(pi/6)*(x2-ns4x)+s4x;x3=0:0.001:80;y3=tan(-pi/3)*x3;xlabel('ds/dψ');ylabel('s');plot(ns1,s1,ns2,s2,ns3,s3,ns4,s4,ns5,s5,x1,y1.x2,y2,x3,y3); grid图五、滚子半径的确定代码:v=[ ];syms x1 x2 x3 x4 x5s0=150;e=90;s1=60-60*cos(1.5*x1);t1=(s1+s0).*cos(x1)-e*sin(x1);y1=(s0+s1).*sin(x1)-e*cos(x1);tx1=diff(t1,x1);txx1=diff(t1,x1,2);yx1=diff(y1,x1);yxx1=diff(y1,x1,2);for xx1=0:(pi/100):(2*pi/3);k1=subs(abs((tx1*yxx1-txx1*yx1)/(tx1^2+yx1^2)^1.5),{x1},{xx1});v=[v,1/k1];ends2=120;t2=(s2+s0).*cos(x2)-e*sin(x2);y2=(s0+s2).*sin(x2)-e*cos(x2);tx2=diff(t2,x2);txx2=diff(t2,x2,2);yx2=diff(y2,x2);yxx2=diff(y2,x2,2);for xx2=(2*pi/3):(pi/100):(10*pi/9);k2=subs(abs((tx2*yxx2-txx2*yx2)/(tx2^2+yx2^2)^1.5),{x2},{xx2});v=[v,1/k2];ends3=60+60*cos(2*x3-20*pi/9);t3=(s3+s0).*cos(x3)-e*sin(x3);y3=(s0+s3).*sin(x3)-e*cos(x3);tx3=diff(t3,x3);txx3=diff(t3,x3,2);yx3=diff(y3,x3);yxx3=diff(y3,x3,2);for xx3=(10*pi/9):(pi/100):(29*pi/18);k3=subs(abs((tx3*yxx3-txx3*yx3)/(tx3^2+yx3^2)^1.5),{x3},{xx3});v=[v,1/k3];ends4=0;t4=(s4+s0).*cos(x4)-e*sin(x4);y4=(s0+s4).*sin(x4)-e*cos(x4);tx4=diff(t4,x4);txx4=diff(t4,x4,2);yx4=diff(y4,x4);yxx4=diff(y4,x4,2);for xx4=(29*pi/18):(pi/100):(2*pi);k4=subs(abs((tx4*yxx4-txx4*yx4)/(tx4^2+yx4^2)^1.5),{x4},{xx4});v=[v,1/k4];endmin(v)编写程序算出最小曲率半径,程序输出结果为ans = 15.0041,即最小曲率半径为ρ=15.0041mm;则滚子半径可以取r=ρ/2≈7.5mm。
机械原理大作业-凸轮作业24题(作业试题)

Harbin Institute of Technology机械原理大作业二课程名称:机械原理设计题目:凸轮机构设计院系:能源科学与工程学院班级:设计者:学号:指导教师:设计时间: 2013/05/261.设计题目如图2-1所示直动从动件盘形凸轮机构,其原始参数见表2-1。
从表2-1中选择一组凸轮机构的原始参数(第24小题),据此设计该凸轮机构。
表2-1 凸轮机构原始参数升程(mm)升程运动角( )升程运动规律升程许用压力角( )回程运动角( )回程运动规律回程许用压力角( )远休止角( )近休止角( )图2-12.凸轮推杆升程,回程运动方程及推杆位移,速度,加速度,运动线图(1)推杆升程,回程方程运动方程如下: A.推杆升程方程:πϕ650<<6112120[sin ]525s ϕϕππ=-14412[1cos]5v ϕωπ=-2172812sin()55a ϕωπ=B.推杆回程方程:10593ππϕ<<91060[1cos ()]59s πϕ=+- 910108sin[()]59v πϕω=-- 2972910cos[()]559a πϕω=--(2)推杆位移,速度,加速度线图如下:A.推杆位移线图Matlab 程序:120 150正弦加速度40 100余弦加速度60 50 60x1=0:0.001:5*pi/6;y1=144*x1/pi-60*sin(12*x1/5)/pi; x2=5*pi/6:0.001:10*pi/9;y2=120;x3=10*pi/9:0.001:5*pi/3;y3=60+60*cos(9*(x3-10*pi/9)/5); x4=5*pi/3:0.001:2*pi;y4=0;plot(x1,y1,x2,y2,x3,y3,x4,y4);B.推杆速度线图Matlab程序:x1=0:0.001:5*pi/6;y1=156/pi-156*cos(12*x1/5)/pi; x2=5*pi/6:0.001:pi;y2=0;x3=pi:0.001:14*pi/9;y3=-117*sin(1.8*x3-1.8*pi);x4=14*pi/9:0.001:2*pi;y4=0;plot(x1,y1,x2,y2,x3,y3,x4,y4);C.推杆加速度线图Matlab程序:x1=0:0.001:5*pi/6;y1=1728*sin(12*x1/5)/(5*pi);x2=5*pi/6:0.001:10*pi/9;y2=0;x3=10*pi/9:0.001:15*pi/9;y3=-972*cos(9*(x3-10*pi/9)/5)/5; x4=15*pi/9:0.001:2*pi;y4=0;plot(x1,y1,x2,y2,x3,y3,x4,y4);3、凸轮机构的ds/dφ-s线图,并以此确定凸轮基圆半径和偏距(1)凸轮机构的ds/dφ-s线图t=0:0.001:5*pi/6;x= 144/pi-144*cos(12*t/5)/pi;y= 144*t/pi-60*sin(12*t/5)/pi;hold onplot(x,y,'-r');t= 5*pi/6:0.01:10*pi/9;x=0;y=120;hold onplot(x,y,'-r');t=10*pi/9:0.001:15*pi/9;x=-108*sin(9*(t-10*pi/9)/5);y=60+60*cos(9*(t-10*pi/9)/5);hold onplot(x,y,'-r');t=15*pi/9:0.01:2*pi;x=0;y=0;hold onplot(x,y,'-r')(2)按许用压力角确定凸轮的基圆半径和偏距a.求升程切点升程许用压力角[α1]=400求得转角t=1.0287, 进而求得切点坐标(x,y)=(81.6870,35.2516)b. 求回程切点回程许用压力角[α]=6002求得转角t=4.7890,进而求得切点坐标(x,y)=(-77.822,18.3975)c. 确定直线方程推程:y= tan(5*pi/18)*(x-81.6870)+35.2615回程:y=-tan(pi/6)*(x+77.8223)+18.3975d. 绘图确定基圆半径和偏距x=-125:1:150;y= tan(5*pi/18)*(x-81.6870)+35.2615;hold on220103.08r x y +=plot(x,y); x=-125:1:150;y=-tan(pi/6)*(x+77.8223)+18.3975; hold on plot(x,y); x=0:1:150;y=-cot(2*pi/9)*x; hold on plot(x,y);t=0:0.001:5*pi/6;x= 144/pi-144*cos(12*t/5)/pi; y= 144*t/pi-60*sin(12*t/5)/pi; hold on plot(x,y,'-r');t= 5*pi/6:0.01:10*pi/9; x=0; y=120; hold on plot(x,y,'-r');t=10*pi/9:0.001:15*pi/9; x=-108*sin(9*(t-10*pi/9)/5); y=60+60*cos(9*(t-10*pi/9)/5); hold on plot(x,y,'-r');t=15*pi/9:0.01:2*pi; x=0; y=0; hold on plot(x,y,'-r'); grid on hold off如上图所示,在这三条直线所围成的公共许用区域,只要在公共许用区域内选定凸轮轴心O 的位置,凸轮基圆半径r 0和偏距e 就可以确定了。
机械原理大作业二凸轮机构设计18

机械原理大作业二课程名称:机械原理设计题目:凸轮机构设计题号:18院系:机电工程学院班级:*******设计者:********学号:***********指导教师:赵永强唐德威设计时间:2015年6月哈尔滨工业大学一、设计题目(18题)设计如图1所示直动从动件盘形凸轮机构。
其原始参数见表1。
图1 直动从动件盘形凸轮机构表1 原始参数凸轮推杆运动规律(1)推程运动规律方程(正弦加速度):位移方程s=h[φΦ0−12πsin(2πΦ0φ)], 0≤φ≤Φ0速度方程v=hωΦ0[1-cos(2πΦ0φ), 0≤φ≤Φ0加速度方程a=2πhω12Φ02sin(2πΦ0),0≤φ≤Φ0(2)回程运动规律方程(等加等减速):位移方程{s=h−2hΦ0′2(φ−Φ0−Φs)2,Φ0+Φs≤φ≤Φ0+Φs+Φ0′2s=2hΦ0′2(Φ0+Φs+Φ0′−φ)2,Φ0+Φs+Φ0′2<φ≤Φ0+Φs+Φ0′速度方程{v=−4hω1Φ0′2(φ−Φ0−Φs),Φ0+Φs≤φ≤Φ0+Φs+Φ0′2v=−4hω1Φ0′2(Φ0+Φs+Φ0′−φ),Φ0+Φs+Φ0′2<φ≤Φ0+Φs+Φ0′加速度方程{a=−4hω1Φ0′2,Φ0+Φs≤φ≤Φ0+Φs+Φ0′a=4hω1Φ0′2,Φ0+Φs+Φ0′2<φ≤Φ0+Φs+Φ0′式中,Φ0——推程运动角;Φs——远休止角;Φ0′——回程运动角。
二、建立凸轮轮廓设计计算数学模型1、建立坐标系图2 建立坐标系2、按许用压力角[α]确定凸轮机构的基本尺寸根据从动件运动规律可以作出从动件位移、速度和加速度线图。
以从动件的位移s 为纵坐标(相当于从动件导路),以类速度dsdφ为横坐标。
给定一系列的凸轮转角φ,则根据已知的运动规律,可求得相应的s 和ds dφ的值,从而作出ds/d φ-s 曲线。
其中ds dφ=dsdt d φdt=v ω,ω为凸轮转动角速度,取ω=1rad/s,则ds dφ=v 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
大作业(二) 凸轮机构设计(题号:8) 班级:姓名、学号:成绩:完成日期:目录1.凸轮机构大作业题目 (2)2.推杆运动规律及凸轮廓线方程 (3)3.程序流程图 (3)4.源程序…………………………………………………^55.计算结果 (14)6.凸轮机构图 (16)7.体会及建议 (19)8.参考资料 (20)一、凸轮机构大作业题目试用计算机辅助设计完成下列摆动滚子推杆盘形凸轮机构的设计,已知数据如下表所示,凸轮沿着逆时针方向做匀速转动。
表1 凸轮机构的推杆运动规律表2 两种凸轮机构的推杆在近休、推程、远休及回程阶段的凸轮转角表3 摆动滚子推杆盘形凸轮机构的已知参数要求:每组(每三人为一组,每人一题)至少打印出一份源程序,每人打印出原始数据;凸轮理论轮廓与实际轮廓的坐标值;推程与回程的最大压力角,以及出现最大压力角时凸轮的相应转角;凸轮实际轮廓曲线的最小曲率半径,以及相应的凸轮转角;与最后说确定的基圆半径。
计算点数N=72~120。
绘出凸轮的理论轮廓与实际轮廓(可用计算机绘图)。
二、推杆运动规律及凸轮廓线方程:推程(正弦加速度):s=h[(δ/δ0)-sin(2πδ/δ0)/(2π)]回程(等加速段):s=h-2hδ2/δ'02回程(等减速段):s=2h(δ'0-δ)2/δ'02凸轮理论廓线方程:x=l OA sinδ-l AB sin(δ+φ+φ0)y=l OA cosδ-l AB cos(δ+φ+φ0)式中,φ0为推杆的初始位置角,其值为:φ四、源程序clear;r0=22;%初选的基圆半径dr0=0、05;a=72; %机架长度L=68;%摆杆长度rr=18;%滚子半径fai=28*pi/180;%推杆摆角PI=3、141592653;alpha1=45;%许用压力角α1alpha2=65;%许用压力角阿尔法2lambda=6、3;%许用最小曲率半径N=120;%取用点的个数delta1=180*pi/180;%推程凸轮最大转角delta2=70*pi/180; %远休凸轮最大转角delta3=80*pi/180;%回程凸轮最大转角delta4=30*pi/180;%近休凸轮最大转角alphamax1=0;% 推程最大压力角初值alphamax2=0; %回程最大压力角初值roumin=100; %凸轮最小曲率半径初值X=ones(1,121);Y=ones(1,121);XP=ones(1,121);YP=ones(1,121);FAI=ones(1,121);I=0;%初始化while(I<=N)F0=acos((a*a+L*L-r0*r0)/(2*a*L));delta=3*I*pi/180;if(delta<180*pi/180&delta>=0) %正弦推程F0=acos((a*a+L*L-r0*r0)/(2*a*L));F=fai* ((delta/delta1)-sin(2*pi*delta/delta1)/(2*pi));x=a*sin(delta)-L*sin(delta+F+F0);y= a*cos(delta)-L*cos(delta+F+F0);dF= fai*(1/delta1-cos(2*pi*delta/delta1)/delta1);ddF=fai*2*pi*sin(2*pi*delta/delta1)/(delta1*delta1);dx=a*cos(delta)-L*cos(delta+F+F0)*(1+dF);ddx=-a*sin (delta)+L* sin(delta+F+F0)*(1+dF)^2-L*cos(delta+F+F0)*ddF;dy=-a*sin(delta)+L*sin(delta+F+F0)*(1+dF);ddy=-a*cos (delta)+L* cos(delta+F+F0)*(1+dF)^2+ L*sin(delta+F+F0)*ddF;stheta=dx/sqrt(dx*dx+dy*dy);ctheta=-dy/sqrt(dx*dx+dy*dy);xp=x-rr*ctheta;yp=y-rr*stheta;alpha=atan((L*abs(dF)+(a*cos(F+F0)-L))/(a*sin(F+F0)))*180/pi;alpha=abs(alpha);if (alpha>alphamax1)alphamax1=alpha;deltamax1=delta*180/pi;endendif(delta>=180*pi/180&delta<250*pi/180)%远休F0=acos((a*a+L*L-r0*r0)/(2*a*L));F=fai;x=a*sin(delta)-L*sin(delta+F+F0);y= a*cos(delta)-L*cos(delta+F+F0);dF=0;ddF=0;dx=a*cos(delta)-L*cos(delta+F+F0)*(1+dF);ddx=-a*sin (delta)+L* sin(delta+F+F0)*(1+dF)^2-L*cos(delta+F+F0)*ddF;dy=-a*sin(delta)+L*sin(delta+F+F0)*(1+dF);ddy=-a*cos (delta)+L* cos(delta+F+F0)*(1+dF)^2+ L*sin(delta+F+F0)*ddF;stheta=dx/sqrt(dx*dx+dy*dy);ctheta=-dy/sqrt(dx*dx+dy*dy);xp=x-rr*ctheta;yp=y-rr*stheta;endif(delta>=250*pi/180&delta<290*pi/180)%等加速回程F0=acos((a*a+L*L-r0*r0)/(2*a*L));F=fai-2*fai*(delta-250*pi/180)*(delta-250*pi/180)/(delta3*delta3);x=a*sin(delta)-L*sin(delta+F+F0);y=a*cos(delta)-L*cos(delta+F+F0);dF=-4*fai*(delta-250*pi/180)/(delta3*delta3);ddF=-4*fai/(delta3*delta3);dx=a*cos(delta)-L*cos(delta+F+F0)*(1+dF);ddx=-a*sin (delta)+L* sin(delta+F+F0)*(1+dF)^2-L*cos(delta+F+F0)*ddF;dy=-a*sin(delta)+L*sin(delta+F+F0)*(1+dF);ddy=-a*cos (delta)+L* cos(delta+F+F0)*(1+dF)^2+ L*sin(delta+F+F0)*ddF;stheta=dx/sqrt(dx*dx+dy*dy);ctheta=-dy/sqrt(dx*dx+dy*dy);xp=x-rr*ctheta;yp=y-rr*stheta;alpha=atan((L*abs(dF) -(a*cos(F+F0)-L))/(a* sin(F+F0))) *180/pi;alpha=abs(alpha);if (alpha>alphamax2)alphamax2=alpha;deltamax2=delta*180/pi;endendif(delta>=290*pi/180&delta<330*pi/180)%等减速回程F0=acos((a*a+L*L-r0*r0)/(2*a*L));F=2*fai*(delta3-(delta-250*pi/180))*(delta3-(delta-250*pi/180))/(d elta3*delta3);dF=-4*fai*(delta3-(delta-250*pi/180))/(delta3*delta3);ddF=4*fai/(delta3*delta3);x=a*sin(delta)-L*sin(delta+F+F0);y=a*cos(delta)-L*cos(delta+F+F0);dx=a*cos(delta)-L*cos(delta+F+F0)*(1+dF);ddx=-a*sin (delta)+L* sin(delta+F+F0)*(1+dF)^2-L*cos(delta+F+F0)*ddF;dy=-a*sin(delta)+L*sin(delta+F+F0)*(1+dF);ddy=-a*cos (delta)+L* cos(delta+F+F0)*(1+dF)^2+ L*sin(delta+F+F0)*ddF;stheta=dx/sqrt(dx*dx+dy*dy);ctheta=-dy/sqrt(dx*dx+dy*dy);xp=x-rr*ctheta;yp=y-rr*stheta;alpha=atan((L*abs(dF)-(a*cos(F+F0)-L))/(a*sin(F+F0)))*180/pi;alpha=abs(alpha);if (alpha>alphamax2)alphamax2=alpha;deltamax2=delta*180/pi;endendif(delta>=330*pi/180&delta<=360*pi/180) %近休F0=acos((a*a+L*L-r0*r0)/(2*a*L));F=0;x=a*sin(delta)-L*sin(delta+F+F0);y=a*cos(delta)-L*cos(delta+F+F0);dF=0;ddF=0;dx=a*cos(delta)-L*cos(delta+F+F0)*(1+dF);ddx=-a*sin (delta)+L* sin(delta+F+F0)*(1+dF)^2-L*cos(delta+F+F0)*ddF;dy=-a*sin(delta)+L*sin(delta+F+F0)*(1+dF);ddy=-a*cos (delta)+L* cos(delta+F+F0)*(1+dF)^2+ L*sin(delta+F+F0)*ddF;stheta=dx/sqrt(dx*dx+dy*dy);ctheta=-dy/sqrt(dx*dx+dy*dy);xp=x-rr*ctheta;yp=y-rr*stheta;endif (alphamax1>alpha1)||(alphamax2>alpha2) %优化条件r0=r0+dr0;I=0;alphamax1=0;alphamax2=0;continueendrou=((dx^2+dy^2)^(3/2))/(dx*ddy-dy*ddx); %计算曲率半径if (rou<0)rou=-rou;if ((rou-rr)<(0、35*rr)) %优化条件r0=r0+dr0;I=0;alphamax1=0; alphamax2=0;continueendif(rou<roumin)roumin=rou;deltamin=delta *180/pi; roumina=roumin-rr;endendX(I+1)=x;Y(I+1)=y;XP(I+1)=xp;YP(I+1)=yp;I=I+1;endfigure(1);axis equalhold ont=0:3:360;X_1=r0*cosd(t); %画基圆Y_1=r0*sind(t);X_2=rr*cosd(t)+X(10); %画滚子Y_2=rr*sind(t)+Y(10);plot(X_1,Y_1,'m--',X,Y,':',XP,YP,'k',X_2,Y_2,'c--'); legend('基圆','理论轮廓','实际轮廓');plot(0,0,'ko'); %固定凸轮点plot(X(10),Y(10),'ko'); %固定滚子点title('凸轮轮廓曲线图');xlabel('X/mm');ylabel('Y/mm');hold offdisp('推程最大压力角:');alphamax1disp('推程最大压力角相应转角:'); deltamax1disp('回程最大压力角:');alphamax2disp('回程最大压力角相应转角:'); deltamax2disp('凸轮最小曲率半径:');roumindisp('凸轮最小曲率半径相应转角:');rouminadisp('最后确定的凸轮基圆半径:');r0五、计算结果A组:推程最大压力角:alphamax1 =34、9492推程最大压力角相应转角: deltamax1 =45回程最大压力角:alphamax2 =46、7626回程最大压力角相应转角: deltamax2 = 255凸轮最小曲率半径:roumin =15、0000凸轮最小曲率半径相应转角: roumina =5、0000最后确定的凸轮基圆半径:r0 =19、7000B组:推程最大压力角:alphamax1 =24、2568推程最大压力角相应转角: deltamax1 = 177、0000回程最大压力角: alphamax2 = 51、9666回程最大压力角相应转角: deltamax2 = 291、0000凸轮最小曲率半径:roumin = 24、3000凸轮最小曲率半径相应转角: roumina =6、3000最后确定的凸轮基圆半径: r0 =32、8000C组:推程最大压力角: alphamax1 =24、2568推程最大压力角相应转角: deltamax1 = 177、0000回程最大压力角: alphamax2 = 51、9666回程最大压力角相应转角: deltamax2 = 291、0000凸轮最小曲率半径:roumin = 24、3000凸轮最小曲率半径相应转角: roumina =6、3000最后确定的凸轮基圆半径: r0 =32、8000六、凸轮机构图A组:B组:C组:七、体会及建议本次凸轮机构的设计,我们熟悉了解析法在机构设计中的应用,锻炼了编程能力。