导线测量平差记录
导线测量成果计算表

213° 26′ 25″ -0.8″ 169° 30′ 07″
202° 56′ 32″ -0.8″ 199° 35′ 11″
222° 31′ 43″ -0.8″ 196° 34′ 35″
239° 06′ 18″ -0.8″ 191° 06′ 16″
-176.875 -196.952 -179.838 -35.979 -75.843 -150.099
0.000 0.000 -0.001 -0.001 -0.001 0.000
-251.743 -267.681 -514.410 -421.578 -468.363 -269.668
-0.008 -0.008 -0.014 -0.011 -0.012 -0.008
462056.095 已知点 461804.345 461536.655 461022.231 460600.643 460132.267 459862.591
∑β左 辅=
1266° 46′ 02″ ####
助
fβ=∑β左-((α终-α始)+7×180°)=
计
fβ容=±10√n=±26
算
″
fβ < fβ容
JM30 204° 03′ 27″ -1.5″ 204° 03′ 26″ 269° 35′ 16″ 368.187
JM31 170° 30′ 03″ -1.5″ 170° 30′ 01″ 260° 05′ 17″ 299.244
JM32 166° 20′ 58″ -1.5″ 166° 20′ 57″ 246° 26′ 14″ 297.548
∑△x= -5602.869
∑△y= -6307.703
使用 PA2005 软件进行导线精密平差
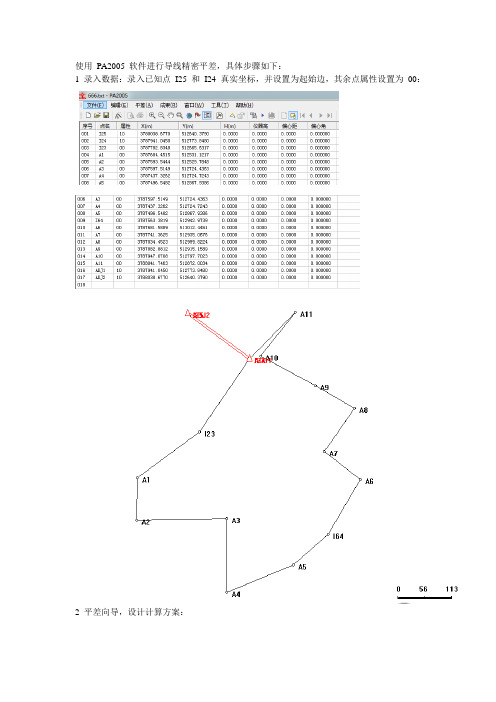
使用PA2005 软件进行导线精密平差,具体步骤如下:1 录入数据:录入已知点I25 和I24 真实坐标,并设置为起始边,其余点属性设置为00:2 平差向导,设计计算方案:3 平差计算:4 闭合差计算:5 控制网平差报告:控制网平差报告计算软件:南方平差易2005网名:计算日期:2015-11-5观测人:王宁宁记录人:王冬计算者:熊猛猛检查者:测量单位:备注:平面控制网等级:城市二级,验前单位权中误差:1.41(s)已知坐标点个数:4未知坐标点个数:13未知边数:14最大点位误差[A5] = 0.0425 (m)最小点位误差[A11] = 0.0206 (m)平均点位误差= 0.0344 (m)最大点间误差= 0.0312(m)最大边长比例误差= 4626平面网验后单位权中误差= 4.21 (s)[边长统计]总边长:1900.251(m),平均边长:135.732(m),最小边长:90.917(m),最大边长:194.692(m)[闭合差统计报告]序号:<1>:附合导线路径:[ADJ2-ADJ1-A11-A10-A9-A8-A7-A6-I64-A5-A4-A3-A2-A1-I23-I24-I25]角度闭合差=-44.00(s),限差=±10.92(s)fx=0.006(m),fy=0.068(m),fd=0.068(m)总边长[s]=1900.251(m),全长相对闭合差k=1/27966,平均边长=135.732(m)[方向观测成果表][平面点位误差表]5.3.7 坐标转换参数计算已知点录入:计算结果:可由DX、DY、R 和DK 值算得四参数为:a=DK*COSR=0.999868617;b=DK*sinR=-0.016392281;c=DX=3788038.6761196m ;d=DY=512640.380192 5588m。
导线测量平差实例
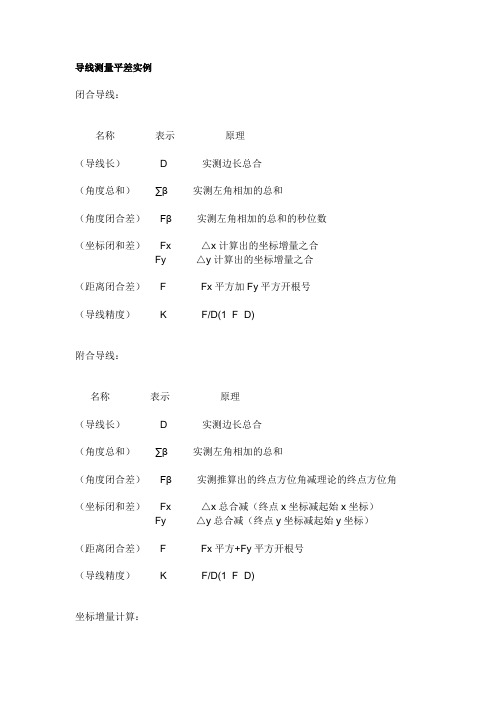
导线测量平差实例
闭合导线:
名称表示原理
(导线长) D 实测边长总合
(角度总和)∑β 实测左角相加的总和
(角度闭合差)Fβ 实测左角相加的总和的秒位数
(坐标闭和差)Fx △x计算出的坐标增量之合
Fy △y计算出的坐标增量之合
(距离闭合差) F Fx平方加Fy平方开根号
(导线精度)K F/D(1÷F×D)
附合导线:
名称表示原理
(导线长) D 实测边长总合
(角度总和)∑β 实测左角相加的总和
(角度闭合差)Fβ 实测推算出的终点方位角减理论的终点方位角
(坐标闭和差)Fx △x总合减(终点x坐标减起始x坐标)
Fy △y总合减(终点y坐标减起始y坐标)
(距离闭合差) F Fx平方+Fy平方开根号
(导线精度)K F/D(1÷F×D)
坐标增量计算:
△x12=D12×cosa12
△y12=D12×sina12
D :实测两点间的距离。
a :实测两点间的方位角。
近似平差方法:①将角度闭合差除以测站数:Fβ÷N(N表示测站数)=∩(角度均值),然后将角度均值加到实测右角中。
②将Fx平方加Fy平方开根号,得出距离闭合差,用距离闭合差除以观测边长数得出距离均值,然后将距离均值加到每一条实测边长中。
③从起测点开始,再通过公式△x12=D12×cosa12 、△y12=D12×sina12求出坐标增量。
用上一测站的坐标加上坐标增量就得出平差后的坐标。
罗盘仪林地测量—罗盘仪林地面积测量(森林调查课件)
安装仪器2点处
对中2点
整平
放下磁针
量仪器高
瞄准1点
读方位角
读倾斜角
测返距离
记录
3
同一导线边的正、反磁方位角应相差180°,
若差值不等于180°,岂不符值(即正方位角之
差值与180°相比较)不得大于±1°,并以平均
方位角作为该导线边的方位角。即:
平均
正
反
2
180
如果超出限差,应查明原因加以改正或重
51 4 23 1 2′ 3′ 4′ 5′ 1′
图解平差
在图上,过2′、3′、4′、5′各点,分别沿1′-1方向作闭 合差1′-1的平行线,并从各点起分别在平行线上截取相应 的改正值,得改正后的各导线点位置,如图中的1、2、3、 4、5点,再将它们按顺序连接,即得到平差后的闭合导线 图形,如图(实线部分)所示。
表示正测 表示反测
N
A
N B
N
N C
N D
数据记录表
罗盘仪导线测量数据记录表
测目 站标
方位角°(精确到′)
正
反
平均
1 2 49°30′ 229°00′ 49°15′
2 3 138°00 318°30′ 138°15
3 4 198°00 19°00′ 198°30
倾斜角°
7°30′ 8°00′
6°00′ 6°00′
罗盘仪导线测量(内业)
目录
1 导线点展绘 2 图解平差 3 面积计算
一
导线点展绘
在导线点展绘之前,应再次检查罗盘仪导线测量记录 ,检查各边距离与角度测量是否符合精度要求,整理计算 出各边的磁方位角、水平距,最后根据测区的大小与测量 的要求选择适当比例尺,用量角器和带有比例尺的直尺将 导线点依次展绘在毫米方格纸上。
拓普康全站仪导线测量与平差示例

TOPCON 北京技术中心 86-10-67802799
6、在主菜单选择[测量],点击[BS/FS测量]开始测量。
显示的对话框如下:
TOPCON 北京技术中心 86-10-67802799
7、确认后视点点号(b),在盘左状态下照准该后视点
按下面板上的[ENT]键观测并记录数据。
TOPCON 北京技术中心 86-10-67802799
TOPCON 北京技术中心 86-10-67802799
TOPCON 北京技术中心 86-10-67802799
其中限差设置部分,
Hz表示水平角限差:[盘左-(盘右-180)] VA表示垂直角限差:[盘左+盘右-360]
D表示距离限差:[盘左-盘右]
测量方法中“盘左-〉盘右”表示的观测顺序为: 盘左 BS -〉盘左 FS,盘右 FS-〉盘右 BS 注:以上限差应该根据所测导线的等级,按对应的规范 要求来设置。
按下[ENT]键测量,如果限差超限,会显示如下对话框:
点击[重测],重新照准,再次按[ENT]进行测量;点击[采用]则保留 当前测量值。
TOPCON 北京技术中心 86-10-67802799
10、盘右观测后视点(b)
盘右观测完前视点后,TopSURV自动切换到后视点盘右观 测界面:
按[ENT] 观测并记录数据(如果超限也会有提示窗口出现)。
TOPCON 北京技术中心 86-10-67802799
5、点击[坐标平差],显示坐标改正结果
点击[保存报表],可以将此次平差的相关数据 保存到文件中。
TOPCON 北京技术中心 86-10-67802799
6、以下是一个闭合导线的示例(在TopSURV中仍称为 附合导线,并按附合导线进行平差处理)
导线平差计算表格及解析

闭合导线坐标计算
注:黄色部分为外业测量出的或者是已知的;
“n”:多边形内角的个数;
“ƒβ容”:图根导线角度闭合差的容许值为±60″√n,当图根导线作为测区的首级控制网时为±40″√n;
β=β测-ƒβ n;
在这儿坐标方位角的计算就不说了;
△x i,1+i=D i,1+i*cosαi,1+i; △y i,1+i=D i,1+i*sinαi,1+i;
ƒx=Ʃ△x,ƒy=Ʃ△y;
导线全长闭合差ƒ=√(ƒ2x+ƒ2y),相对闭合差K=ƒ∕ƩD,图根导线的容许相对闭合差K容=1∕2000,当K<K容时则说明符合精度要求,可以进行调整,
υ△xi,1+i=-(ƒx∕ƩD)*D i,1+i,υ△yi,1+i=-(ƒy∕ƩD)*D i,1+i;
△x △y x y
υ△xi,1+i υ△yi,1+i ±±
△x i,1+i
△y i,1+i
Ʃ
ƩD ƒx ƒy
辅助计算
观测角 (β测) ′ ″改正数
(β) 改正后角度 ′ ″
坐标方位角 ′ ″
56序号1234△x′△y′ƒβ角度闭合差=Ʃβ测-Ʃβ
理=Ʃβ测-(n-2)*180; ƒβ
≤ƒβ容;
ƒx=Ʃ△x,ƒy=Ʃ△y; ƒD =√(ƒ2x +ƒ2y )
注:1、附合导线和闭合导线的差别在于两个方面:①角度闭合差的计算和调整,②坐标增量闭合差的计算;(怎么计算就不一一说了,见谅!)
坐标增量 m 改正后增量 m
坐标值 m 距离 m。
三、四等导线测量规范
导线测量规范(Ⅰ)导线测量的主要技术要求各等级导线测量的主要技术要求,应符合表3.3.1的规定。
注:1 表中n为测站数。
2 当测区测图的最大比例尺为1:1000时,一、二、三级导线的导线长度,、平均边长可适当放长,但最大长度不应大于表中规定相应长度的2倍。
3.3.2 当导线平均边长较短时,应控制导线边数不超过表3.3.1相应等级导线长度和平均边长算得的边数;当导线长度小于表3.3.1规定长度的1/3时,导线全长的绝对闭合差不应大于13㎝。
3.3.3 导线网中,结点与结点、结点与高级点之间的导线段长度不应大于表3.3.1中相应等级规定长度的0.7倍。
(Ⅲ)水平角观测3.3.7 水平角观测所使用的全站仪、电子经纬仪和光学经纬仪,应符合下列相关规定:1 照准部旋转轴正确性指标:管水准器气泡或电子水准器长气光在各位置的读数较差,1秒级仪器不应超过2格,2秒级仪器不应超过1格,6秒级仪器不应超过1.5格。
2 光学经纬仪的测微器行差及隙动差指标:1秒级仪器不应大于1秒,2秒级仪器不应大于2秒。
3 水平轴不垂直于垂直轴之差指标;1秒级仪器不应超过10秒,2秒级仪器不应超过15秒,6秒级仪器不应超过20秒。
4 补偿器的补偿要求:在仪器补偿器的补偿区间,对观测成果应能进行有效补偿。
5 垂直微动旋转使用时,视准轴在水平方向上不产生偏移。
6 仪器的基座在照准部施转时的位移指标:1秒级仪器不应超过0.3秒,2秒级仪器不应超过1秒,6秒级仪器不应超过1.5秒。
7 光学(或激光)对中器的视轴(或射线)与竖轴的重合度不应大于1㎜。
3.3.8 水平角观测宜采用方向观测法,并符合下列规定:1 方向观测法的技术要求,不应超过表3.3.8的规定。
表3.3.8水平角方向观测法的技术要求注;1 全站仪、电子经纬仪水平角观测时不受光学测微器两次重合读数之差指标的限制。
2 当观测方向的垂直角超过±30的范围时,该方向2C互差可按相邻测回同方向进行比较,其值应满足表中一测回内2C互差的限值。
全站仪坐标导线测量的平差方法
随着全站仪在工程测量中应用的逐渐普及,采用导线作为测量的平面控制越来越广泛,导线一般多布设成单一导线。
应用全站仪观测导线,可以通过机内的微处理器,直接得到地面点的平面近似坐标,因此在成果处理时可以应用这些近似坐标直接按坐标平差(即间接平差)法进行平差。
本文主要针对采用全站仪观测导线的近似平差和严密平差方法进行探讨。
导线的近似坐标平差导线测量用于图根控制等低精度测量中,往往采用近似平差即可。
由于全站仪直接测定各导线点的近似坐标值,平差计算就不用像传统的导线近似平差计算那样,先进行角度闭合差计算和调整,然后推算方位角,再进行坐标增量闭合差的计算和调整,最后根据平差后的坐标增量计算导线点的坐标。
全站仪观测导线直接按坐标平差计算,将更为简便。
直接按坐标平差法计算步骤如下:假设有一条附合导线,由于存在观测误差,最后测得的一点(假设为C)坐标与该点已知坐标(xc,yc)不一致,其差值即为纵、横坐标增量闭合差,即(1)导线全长闭合差为f:(2)导线全长相对闭合差为:(3)此时若满足要求的精度,就可以直接根据坐标增量闭合差来计算各个导线点的坐标改正数,各导线点的坐标改正值计算公式为:(4)改正后各点坐标xi、yi为:(5)式中,∆x1、∆x2、∆x i、∆y1、∆y2、∆y i、分别为第一、第二和第i条边的近似坐标增量;x i’、y i’为各待定点坐标的观测值(即全站仪外业直接观测的导线点的坐标)。
采用坐标法进行导线近似平差,直接在已经测得导线点的坐标上进行改正,方法简单,易于掌握,避免了传统近似平差法的方位角的推算和改正,以及坐标增量的计算和改正,能大大提高工作效率,而且不易出错。
同时可以看出传统附和导线测量需要两条已知边,作为方位角的检核条件,而直接坐标法,只需要一条已知边和一个已知点即可,使导线的布网更加灵活。
导线的严密坐标平差采用全站仪观测导线的优势高等级平面控制测量对精度的要求较高,需要严密平差。
全站仪观测的导线采用严密坐标平差法较为适宜。
导线测量平差记录表
导线测量平差最近更新导线测量平差最近发布4.2版,主要增加或更新了以下功能:(如表格显示不正常,请刷新)一、表格输出。
表格输出到WORD,支持表格中的列向下错开半行(如方位角、边长),所有表格输出到WORD后与软件中显示的样式一样。
如下表:导线严密平差计算表工程名称:附合及水准示例等级:城市二级计算者:杨运英校核者:日期:2003.08.28二、导线采用近似平差且方位角边长不进行反算时的表格样式。
原表格中显示的是坐标增量改正数,现增加了一个选项,可以选择显示改正后的坐标增量,以满足一些工程要求格式统一的要求。
导线平差计算表工程名称:附合及水准示例等级:城市二级计算者:杨运英校核者:日期:2003.08.28、坐标导线平差。
指使用全站仪直接观测坐标、高程的闭、附合导线,其中平面坐标完全差的分配方式可以选用“按边长”、“按坐标增量”、“坐标转换”等方式。
坐标导线平差计算表工程名级:城市二级:杨运英校核者:日期:200四、单面单程水准记录计算已知点较密时线路中间也可以穿过已知点。
当含有中视时可以用于中平测量等,表格形式如下:水准测量记录计算表测线:仪器:观测:天气:地点:记录:计算者:校核者:日期:不含有中视时可用于五等、等外水准等的记录、计算。
表格形式如下:水准测量记录计算表测线:仪器:观测:天气:地点:记录:计算:校核:日期:部测量知点设站,后视另一已知点,观测各碎部点,计算其坐标、高程,绘制图形并可输出到CAD。
方式可以选用“斜距+天顶距”、“平距+高差”或“视距+天顶距”。
距+高差”方式表格如下:碎部测量记录后视:B 测站高程:仪高:气:复核:距”(或“斜距+天顶距”)表格如下:碎部测量记录后视:B 测站高程:指标差:0" 天气:记录:日期:坐标转换于同椭球的不同坐标系间进行转换。
比如同椭球的国家坐标系与工程独立坐标系的转换。
坐标转换计算表工程名第页计算:复核:日期:支导线计算里指输入方位角与边长计算坐标的支导线,如需输入水平角、边长计算各点坐标,请使用“平差计算”模块中的支导线进行计算。
导线测量平差教程
计算方案得设置一、导线类型:1、闭、附合导线(图1)2、无定向导线(图2)3、支导线(图3)4、特殊导线及导线网、高程网(见数据输入一节),该选项适用于所有得导线,但不计算闭合差。
而且该类型不需要填写未知点数目。
当点击表格最后一行时自动添加一行,计算时删除后面得空行。
5、坐标导线。
指使用全站仪直接观测坐标、高程得闭、附合导线。
6、单面单程水准测量记录计算。
指仅进行单面读数且仅进行往测而无返测得水准测量记录计算。
当数据中没有输入“中视”时可以用作五等、等外水准等得记录计算。
当输入了“中视”时可以用作中平测量等得记录计算。
说明: 除“单面单程水准测量记录计算”仅用于低等级得水准测量记录计算外,其它类型选项都可以进行平面及高程得平差计算,输入了平面数据则进行平面得平差,输入了高程数据则进行高程得平差,同时输入则同时平差。
如果不需进行平面得平差,仅计算闭、附合高程路线,可以选择类型为“无定向导线”,或者选择类型为“闭附合导线”但表格中第一行及最后一行数据(均为定向点)不必输入,因为高程路线不需定向点。
二、概算1、对方向、边长进行投影改化及边长得高程归化,也可以只选择其中得一项改正。
2、应选择相应得坐标系统,以及Y坐标就是否包含500KM。
选择了概算时,Y坐标不应包含带号。
三、等级与限差1、在选择好导线类型后,再选择平面及高程得等级,以便根据《工程测量规范》自动填写限差等设置。
如果填写得值不符合您所使用得规范,则再修改各项值得设置。
比如现行得《公路勘测规范》得三级导线比《工程测量规范》得三级导线要求要低一些。
2、导线测量平差4、2及以前版本没有设置限差,打开4、2及以前版本时请注意重新设置限差。
四、近似平差与严密平差得选择及近似平差得方位角、边长就是否反算1、近似平差:程序先分配角度闭合差再分配坐标增量闭合差,即分别平差法。
2、严密平差:按最小二乘法原理平差。
3、《工程测量规范》规定:一级及以上平面控制网得计算,应采用严密平差法,二级及以下平面控制网,可根据需要采用严密或简化方法平差。