嵌入式ARM平台下的Linux字符设备驱动实例
嵌入式Linux下GPIO驱动程序的开发及应用

第28卷第4期增刊 2007年4月仪 器 仪 表 学 报Chinese Jour nal of Scientif ic InstrumentVol.28No.4Apr.2007 嵌入式L inux 下GPIO 驱动程序的开发及应用3何 泉,贺玉梅(北京化工大学信息科学与技术学院 北京 100029)摘 要:嵌入式Linux 是一种适用于嵌入式系统的源码开放的占先式实时多任务操作系统,是目前操作系统领域中的一个热点,其重点与难点是驱动程序的开发。
开发嵌人式Linux 下的设备驱动程序,可以更好地利用新硬件特性,提高系统访问硬件的效率,改善整个应用系统的性能。
驱动程序修改非常方便,使应用系统非常灵活。
本文简要论述了基于A TM E L 公司嵌入式ARM 处理器芯片的嵌入式Linux 的GP IO 驱动程序的开发原理及流程。
关键词:嵌入式Linux ;ARM ;驱动程序;设备文件;GPIOInvest igat ion an d a pplicat ion of GP IO dr iver in t he embedded L inuxHe Quan ,He YuMei(School of I nf orma tion Science and Tec hnology BU CT ,Beij ing 100029,China )Abstract :Embedded Linu x ,w hich i s a full y real 2time kernel and applicable to embedded syst ems ,has bec o me a hot s 2po t in t he do main of op erati ng system at present.It s out line and difficult y is to investigat e drivers.Developi ng device dri vers o n embedded Lin ux can help using t he new devices ,and imp rovi ng t he e fficiency of access to t he new devices and t he p erformance cap abilit y.As drivers can be changed easil y ,t he system is very convenient and flexi ble.Thi s p a 2p er simpl y point s o ut t he element s and flow of t he GPIO driver in t he embedded Linux based o n t he A RM proces sor of A TMEL system.Key words :embedded Li nux ;A RM ;driver ;device file ;GPIO 3基金项目国家自然科学基金(6)、北京化工大学青年教师自然科学研究基金(QN 58)资助项目1 引 言随着半导体技术的飞速发展,嵌入式产品已经广泛应用于军事、消费电子、网络通信、工业控制等各个领域,这是嵌入式系统发展的必然趋势。
基于嵌入式ARM-Linux无线ZigBee协调器驱动设计

协调器是整个网络的核心部分,负责完成整个网络的无线接入和组建,是维持路由器和终端节点之间的数据通信的关键。在田间固定放置协调器节点会浪费大量的资源,若动态地测量田间任意位置的数据,把协调器作为移动设备动态地测量数据则是最好的选择,并且可以减少田间协调器的放置,降低设计难度的成本。2 嵌入式Linux驱动开发环境的搭建 Linux操作系统环境的搭建。
嵌入式Linux下ADC的驱动程序实现与应用

嵌入式Linux下ADC的驱动程序实现与应用作者:孙德辉梁鑫杨扬来源:《现代电子技术》2008年第22期摘要:详细介绍S3C2410芯片ADC模块以及Linux的驱动模型,并且通过S3C2410内置的ADC驱动程序设计说明字符型设备驱动开发方法;将驱动编译为模块的方式,单独加载入内核,便于调试。
以MINICOM为操作台,控制驱动模块的加载和应用程序的运行。
并通过实例介绍ADC驱动程序在电阻、电压等测试中的实际应用;从实验结果可以看出ADC驱动可以被成功加载和调用;该驱动可以测试电压、电流等标准工程量信号,或作为工业传感器接口的一部分对现场标准工程量信号进行采集处理。
关键词:S3C2410;ADC;Linux;字符设备驱动程序中图分类号:TP311文献标识码:B文章编号:1004373X(2008)2203303Implement and Application of ADC Driver about Embedded-LinuxSUN Dehui,LIANG Xin,YANG Yang(Key Laboratory of Beijing Municipality,The FAT Laboratory,North China University of Technology,Beijing,100041,China)Abstract:The module of ADC in S3C2410 CMOS chip and the model about Linux drivers are expounded,the method of developing character device drivers are illuminated by realizing an ADC driver.As convenient to debug,compiling the drivers into module and "insmod" it into kernel.Updating the drivers module and application by MINICOM,one kind of consoles.Application on testing resistance and voltage using ADC driver are introduced through an example.In the end,it is obviously that ADC drivers module could be "insmoded"and called successful from the result of ing the drivers testing resistance,voltage and many other standard signal.ADC drivers can collect the standard signal of plants as one part of interface of industrial sensor.Keywords:S3C2410;ADC;Linux;character device driver1 引言S3C2410开发板制造商提供了绝大部分的驱动程序,但有时出于实际开发的需要、应用程序的稳定性考虑,用户往往需要开发一个自己需要的接口驱动程序。
ARM板TL_WN725N usb wifi Linux Driver 移植
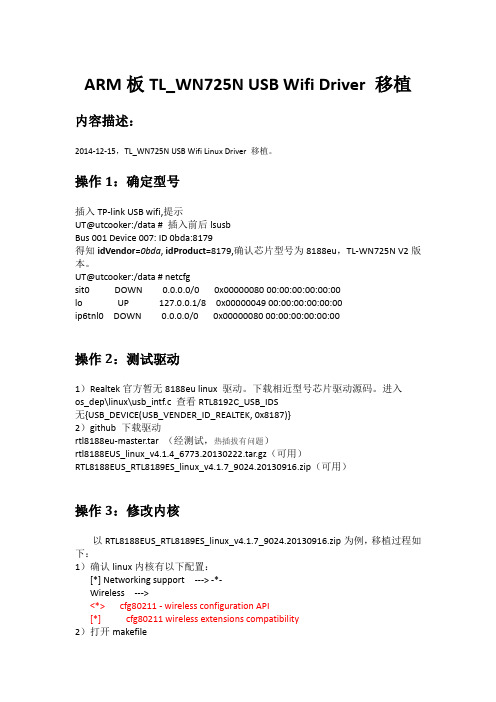
ARM板TL_WN725N USB Wifi Driver 移植内容描述:2014-12-15,TL_WN725N USB Wifi Linux Driver 移植。
操作1:确定型号插入TP-link USB wifi,提示UT@utcooker:/data # 插入前后lsusbBus 001 Device 007: ID 0bda:8179得知idVendor=0bda, idProduct=8179,确认芯片型号为8188eu,TL-WN725N V2版本。
UT@utcooker:/data # netcfgsit0 DOWN 0.0.0.0/0 0x00000080 00:00:00:00:00:00lo UP 127.0.0.1/8 0x00000049 00:00:00:00:00:00ip6tnl0 DOWN 0.0.0.0/0 0x00000080 00:00:00:00:00:00操作2:测试驱动1)Realtek官方暂无8188eu linux 驱动。
下载相近型号芯片驱动源码。
进入os_dep\linux\usb_intf.c 查看RTL8192C_USB_IDS无{USB_DEVICE(USB_VENDER_ID_REALTEK, 0x8187)}2)github 下载驱动rtl8188eu-master.tar (经测试,热插拔有问题)rtl8188EUS_linux_v4.1.4_6773.20130222.tar.gz(可用)RTL8188EUS_RTL8189ES_linux_v4.1.7_9024.20130916.zip(可用)操作3:修改内核以RTL8188EUS_RTL8189ES_linux_v4.1.7_9024.20130916.zip为例,移植过程如下:1)确认linux内核有以下配置:[*] Networking support --->-*-Wireless ---><*> cfg80211 - wireless configuration API[*] cfg80211 wireless extensions compatibility2)打开makefileCONFIG_PLATFORM_I386_PC = y 改为CONFIG_PLATFORM_I386_PC = nCONFIG_PLATFORM_ARM_S3C2K4 =n 改CONFIG_PLATFORM_ARM_S3C2K4 = y 配置编译链及内核源码地址ifeq ($(CONFIG_PLATFORM_ARM_S3C2K4), y)EXTRA_CFLAGS += -DCONFIG_LITTLE_ENDIANARCH := armCROSS_COMPILE := /opt/FriendlyARM/gcc-toolschain/4.5.1/bin/arm-linux-KSRC := /svn/pengdonghui/Android_maize/linux-3.5-newEndif3)make –j32后得到8188eu.ko放入开发板:adb push 8188eu.ko /data加载驱动模块:UT@utcooker:/data # insmod 8188eu.ko[18668.230000] bFWReady == _FALSE call reset 8051...[18668.260000] usbcore: registered new interface driver rtl8188eu 查看网络设备:UT@utcooker:/data # ifconfig -a…wlan0 Link encap:Ethernet HWaddr 08:57:00:98:6B:31BROADCAST MULTICAST MTU:1500 Metric:1RX packets:0 errors:0 dropped:0 overruns:0 frame:0TX packets:0 errors:0 dropped:0 overruns:0 carrier:0collisions:0 txqueuelen:1000RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)此时,此时能看到网络接口,Android界面setting 无法打开wifi。
毕业设计参考题目

印制时间:2013-7-26 22:54
西南科技大学 汽车应用技术学院助学点
学生毕业设计参考题目
序号 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 毕业设计参考题目 杠杆零件工艺装备设计 夹具体零件工艺装备设计 拨叉(二)工艺装备设计 250*1000鄂式破碎机设计 500kg/d粉体的无铁超细管磨机设计 手摇式按摩器设计 杠杆零件工艺装备设计 新型发泡机的研制 组装下压机设计 基于三维造型汽油机链轮室钻铰销孔夹具的设计 自动装卸机设计 瓦楞纸板纵切机压痕装置设计 瓦楞纸板纵切机分切装置设计 涂布机设计 基于三维造型汽油机链轮室气压实验夹具的设计 基于三维造型汽油机链轮室涡壳面铣削夹具的设计 皮带跑偏自动调节控制装置研究 现代制造技术实验中心自动化网络系统设计 机械手自动化控制系统的PLC实现方法研究-硬件部分 直缝焊接机设计 机器人自动火焰切割H型钢的设计 经济型数控系统研究与设计 运送铝活塞铸造毛坯机械手设计 机械手自动化控制系统的PLC实现方法研究-软件部分 送料机械手设计及Solidworks运动仿真 精密数控平面磨床--工作台纵向进给、横向进给机构设计 海洋采矿破碎试验台液压系统设计 三轴机器人的结构设计 罐式厌氧发酵工艺及设备设计 基于反求工程的叶片零件数控加工工艺研究 摩擦锲块锻模的造型设计与加工工艺研究 基于PLC的水泥生料配料控制系统研究 车门总成MIG机器人焊接工作站控制系统设计 移动式皮带输送机设计 柴油机通风口座拉深模具及工艺设计 柴油机过轮轴机械加工工艺设计 链斗式提升机设计 安装板冲裁弯曲模具及工艺设计 瓦楞纸板纵切机切刀装置设计 瓦楞纸板涂胶机传动装置设计 家禽脱毛机的研制 瓦楞纸板横切机传动装置设计 瓦楞纸板涂胶机涂胶装置设计 基于三维造型汽油机链轮室攻丝夹具的设计 基于三维造型汽油机链轮室盖镗削夹具的设计 基于三维造型汽油机链轮室盖铣削夹具的设计 教务办 制
基于rk3568的linux驱动开发——gpio知识点
基于rk3568的linux驱动开发——gpio知识点基于rk3568的Linux驱动开发——GPIO知识点一、引言GPIO(General Purpose Input/Output)通用输入/输出,是现代计算机系统中的一种常用接口,它可以根据需要配置为输入或输出。
通过GPIO 接口,我们可以与各种外设进行通信,如LED灯、按键、传感器等。
在基于Linux系统的嵌入式设备上开发驱动程序时,熟悉GPIO的使用是非常重要的一环。
本文将以RK3568芯片为例,详细介绍GPIO的相关知识点和在Linux驱动开发中的应用。
二、GPIO概述GPIO是系统中的一个基本的硬件资源,它可以通过软件的方式对其进行配置和控制。
在嵌入式设备中,通常将一部分GPIO引脚连接到外部可编程电路,以实现与外部设备的交互。
在Linux中,GPIO是以字符设备的形式存在,对应的设备驱动为"gpiolib"。
三、GPIO的驱动开发流程1. 导入头文件在驱动程序中,首先需要导入与GPIO相关的头文件。
对于基于RK3568芯片的开发,需要导入头文件"gpiolib.h"。
2. 分配GPIO资源在驱动程序中,需要使用到GPIO资源,如GPIO所在的GPIO Bank和GPIO Index等。
在RK3568芯片中,GPIO资源的分配是通过设备树(Device Tree)来进行的。
在设备树文件中,可以定义GPIO Bank和GPIO Index等信息,以及对应的GPIO方向(输入或输出)、电平(高电平或低电平)等属性。
在驱动程序中,可以通过设备树接口(Device Tree API)来获取这些GPIO资源。
3. GPIO的配置与控制在驱动程序中,首先要进行GPIO的初始化与配置。
可以通过函数"gpiod_get()"来打开指定的GPIO,并判断其是否有效。
如果成功打开GPIO,则可以使用函数"gpiod_direction_output()"或"gpiod_direction_input()"来设置GPIO的方向,分别作为输出或输入。
实验二:字符设备驱动实验

实验二:字符设备驱动实验一、实验目的通过本实验的学习,了解Linux操作系统中的字符设备驱动程序结构,并能编写简单的字符设备的驱动程序以及对所编写的设备驱动程序进行测试,最终了解Linux操作系统如何管理字符设备。
二、准备知识字符设备驱动程序主要包括初始化字符设备、字符设备的I/O调用和中断服务程序。
在字符设备驱动程序的file_operations结构中,需要定义字符设备的基本入口点。
open()函数;release()函数read()函数write()函数ioctl()函数select()函数。
另外,注册字符设备驱动程序的函数为register_chrdev()。
register_chrdev() 原型如下:int register_chrdev(unsigned int major, //主设备号const char *name, //设备名称struct file_operations *ops); //指向设备操作函数指针其中major是设备驱动程序向系统申请的主设备号。
如果major为0,则系统为该驱动程序动态分配一个空闲的主设备号。
name是设备名称,ops是指向设备操作函数的指针。
注销字符设备驱动程序的函数是unregister_chrdev(),原型如下:int unregister_chrdev(unsigned int major,const char *name);字符设备注册后,必须在文件系统中为其创建一个设备文件。
该设备文件可以在/dev目录中创建,每个设备文件代表一个具体的设备。
使用mknod命令来创建设备文件。
创建设备文件时需要使用设备的主设备号和从设备号作为参数。
阅读教材相关章节知识,了解字符设备的驱动程序结构。
三、实验内容根据教材提供的实例。
编写一个简单的字符设备驱动程序。
要求该字符设备包括open()、write()、read()、ioctl()和release()五个基本操作,并编写一个测试程序来测试所编写的字符设备驱动程序。
基于ARMLinux平台的CAN设备驱动程序设计与实现
基金项目: 国家自然科学基金( the National Natural Science Foundation of China under Grant No.60675044) 。 作者简介: 王彦堂( 1982- ) , 男, 硕士研究生, 主要研究方向: 嵌入式系统底层架构设计与系统软件设计; 李贻斌( 1960- ) , 男, 教授, 博 导 , 山 东 大 学
3.2 文件操作接口
CAN 设备驱动程序最 终 提 供 给 应 用 程 序 的 是 一 个 流 控 制 接 口, 主 要 包 括 open、close( 或 realse) 、read、write、ioctl 等 操 作 。 添加设备驱动程序, 实际上就是给上述操作编写相应的程序代 码。对于字符设备和块设备, Linux 内核对这些操作作了统一的 抽象, 而每一个设备都会用一个特殊的设备文件来表示, 通过 虚拟文件系统, 应用程序得到一组与具体设备无关的系统调 用。而虚拟文件系统的主体就是结构体 file_operations, 每一种 文件系统都有自己的 file_operations 数据结 构 , 结 构 体 中 的 每 一个成员都是一个函数指针, 实际上实现了对于不同操作的函 数跳转功能, 例如 open 是指向具体文件系统用来实现打开设 备文件操作的入口函数。可以 说 file_operations 实 现 了 标 准 文 件操作到硬件设备操作的映射, 在 Linux2.4.18 内 核 中 , 结 构 体 file_operations 的定义( include/Linux/fs.h) 如下:
3 嵌入式 ARM Linux 系统中 CAN 总线软件设计
为了在 ARM Linux 系统环境中操作 CAN 设备, 实现 CAN 通信功能, 在系统软件层设计了专门的 CAN 总线软件接口。它 包括 CAN 驱动程序和 SPI 接口读写程序。CAN 总线软件接口 负责为上层应用层提供透明的 CAN 通信服务, 屏蔽 CAN 控制 器 MCP2510 的 具 体 工 作 细 节 。 同 时 利 用 SPI 接 口 程 序 通 过 MCP2510 控制命令实现对 CAN 控制器的具体操作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
嵌入式ARM平台下的Linux字符设备驱动实例
6.1 下面以一个名为S3C2440_leds.c”的简单控制目标板LED亮灭的驱动为例进行分析。
(目标板为天嵌TQ2440;Linux2.6.25.8)。
主要功能是通过应用程序调用该驱动来按制目标板的四个LED灯的亮灭。
驱动源程序如下:
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/fs.h>
#include <linux/init.h>
#include <linux/delay.h>
#include <asm/irq.h>
#include <asm/arch/regs-gpio.h>
#include <asm/hardware.h>
#define DEVICE_NAME "leds" /* 加载模式后,执行”cat /proc/devices”命令看到
的设备名称*/
#define LED_MAJOR 231 /* 主设备号*/
/* 应用程序执行ioctl(fd, cmd, arg)时的第2 个参数*/
#define IOCTL_LED_ON 0
#define IOCTL_LED_OFF 1
/* 用来指定LED 所用的GPIO 引脚*/
static unsigned long led_table [] = {
S3C2410_GPB5,
S3C2410_GPB6,
S3C2410_GPB7,
S3C2410_GPB8,
};
/* 用来指定GPIO 引脚的功能:输出*/
static unsigned int led_cfg_table [] = {
S3C2410_GPB5_OUTP,
S3C2410_GPB6_OUTP,
S3C2410_GPB7_OUTP,
S3C2410_GPB8_OUTP,
};
/*应用程序对设备文件/dev/leds 执行open()时,
*就会调用s3c24xx_leds_open */
static int s3c24xx_leds_open(struct inode *inode, struct file *file)
{
int i;
for(i=0; i<4; i++)
{
s3c2410_gpio_cfpin(led_table[i], led_cfg_table[i])
}
return 0;
}
/*应用程序对设备文件/dev/leds 执行iotcl()时,
*就会调用s3c24xx_leds_iotcl
*/
static int s3c24xx_leds_iotcl(struct inode *inode, struct file *file, unsigned int cmd, unsigned long arg)
{
if (arg > 4)
{
return -EINV AL;
}
switch(cmd) {
case IOCTL_LED_ON:
s3c2410_gpio_setpin(led_table[arg], 0);
return 0;
case IOCTL_LED_OFF:
s3c2410_gpio_setpin(led_table[arg], 1);
return 0;
default:
return -EINV AL;
}
}
/*这个结构是字符设备驱动程序的核心
*当应用程序操作设备文件时调用的open、read等函数,
*最终会调用这个结构中指定的对应函数
static sturct s3c24xx_leds_fops = {
.owner = THIS_MODULE,
.open = s3c24xx_leds_open,
.ioctl = s3c24xx_leds_ioctl
};
/*模块的初始化函数*/
static int __init s3c24xx_leds_init(void)
{
int ret;
ret = register_chrdev(LED_MAJOR, DEVICE_NAME, &s3c24xx_leds_fops);
if(ret < 0)
{
printk(DEVICE_NAME "can't register major number\n");
return ret;
}
printk(DEVICE_NAME "initialized\n");
return 0;
}
/*模块的撤销函数*/
static void __exit s3c24xx_leds_exit(void)
{
unregister_chrdev(LED_MAJOR, DEVICE_NAME);
}
/*指定驱动程序的初始化函数和卸载函数*/
module_init(s3c24xx_leds_init);
module_exit(s3c24xx_leds_exit);
/*加入描述信息*/
MODULE_AUTHOR("ckz");
MODULE_DESCRIPTION("S3C2440 LED Driver");
MODULE_LICENSE("GPL");
写好的驱动放在内核源文件目录下:linux2.6.25.8]#drivers/char/
6.2 以模块形式编译及加载
修改同目录下的“Kconfig”文件,在合适的地方添加如下内容:
Config S3C2440_LEDS
tristate “S3C2440 LEDS Driver”
depends on ARCH_S3C2440
help
LEDS on S3C2440
然后再通目录下修改“Makefile”,添加如下内容:
Obj-$(CONFIG_ S3C2440_LEDS) += S3C2440_leds o
添加完成以上内容之后,输入#make menuconfig,然后配置如下
Device Drivers -
Character devices ->
<M> S3C2440 LEDS Driver
将其选择为“M”,然后保存配置,编译出内核镜像烧写到开发板中。
然后再使用命令#make SUBDIR=drivers/char modules,编译出驱动模块,在内核目录下的“drivers/char”下面,名为S3C2440_leds.Ko,将其复制到开发板中的/lib目录中。
加载、卸载驱动到目标系统中。
在/lib目录下:
***] insmod S3C2440_leds.KO /***加载驱动***/
***] rmmod S3C2440_leds.KO /***卸载驱动***/
6.3 下面编写简单的应用程序来测试刚才的驱动程序,新建名为leds.c的文件
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/ioctl.h>
int main(int argc, char **argv)
{
int on;
int led_no;
int fd;
if (argc != 3 || sscanf(argv[1], "%d", &led_no) != 1 || sscanf(argv[2],"%d", &on) != 1 || on < 0 || on > 1 || led_no < 1 || led_no > 4) {
fprintf(stderr, "Usage: leds led_no 0|1\n");
exit(1);
}
fd = open("/dev/GPIO-Control", 0);
if (fd < 0) {
perror("open device leds");
exit(1);
}
ioctl(fd, on, (led_no-1));
close(fd);
return 0;
}
因为这只是一个简单的应用程序所以没有必要编写Makefile文件,直接使用arm-linux-gcc 命令编译并将其传到目标板上运行即可!
在终端中输入:./leds 2 0
则目标板上的第二个LED灯亮被点亮。