控制工程基础实验报告
控制工程基础仿真实验报告

本科生课程论文控制工程基础仿真实验报告实验一一阶系统的单位阶跃响应一、实验目的1、学会使用ATLABM编程绘制控制系统的单位阶跃响应曲线;2、掌握准确读取动态特征指标的方法;3、研究时间常数T对系统性能的影响;4、掌握一阶系统11Ts+时间响应分析的一般方法;5、通过仿真实验,直观了解各典型环节的时间响应和频率响应,巩固课程中所学的基本概念和基本原理;二、实验要求1、输入3个不同的时间常数T,观察一阶系统11Ts+的单位阶跃响应曲线的变化,绘制响应曲线图,并分析时间常数T对系统性能的影响。
2、若通过实验已测得一阶系统11Ts+的单位阶跃响应曲线,试说明如何通过该曲线确定系统的时间常数T。
三、实验内容(一)实验设备计算机;WINDOWS操作系统,并安装Matlab语言编程环境。
(二)实验原理通过对各种典型环节的仿真实验,可以直观的看到各种环节的时间响应和频率响应的图像。
通过对所得图像的分析可以得出各种参数如何影响系统的性能。
四、实验过程在Matlab平台对一阶系统11Ts+的单位阶跃响应进行仿真。
(1)输入3个不同的时间常数T,观察一阶系统单位阶跃响应曲线的变化,绘制响应曲线图,并分析时间常数T对系统性能的影响。
在Matlab中进行操作,其代码如下:1.num=1;2.den=[11];3.g=tf(num,den)4.5.g =6.7.18. -----9. s + 110.11.Continuous-time transfer function.12.13.>> step(g)14.hold on15.>> step(tf(1,[21]))16.>> step(tf(1,[41]))17.>> legend('T=1','T=2','T=4');(2)对于已测得的一阶系统的单位阶跃响应曲线,分析通过该曲线确定系统的时间常数T的方法。
南京理工大学控制工程基础实验报告
《控制工程基础》实验报告姓名欧宇涵 914000720206周竹青 914000720215 学院教育实验学院指导老师蔡晨晓南京理工大学自动化学院2017年1月实验1:典型环节的模拟研究一、实验目的与要求:1、学习构建典型环节的模拟电路;2、研究阻、容参数对典型环节阶跃响应的影响;3、学习典型环节阶跃响应的测量方法,并计算其典型环节的传递函数。
二、实验内容:完成比例环节、积分环节、比例积分环节、惯性环节的电路模拟实验,并研究参数变化对其阶跃响应特性的影响。
三、实验步骤与方法(1)比例环节图1-1 比例环节模拟电路图比例环节的传递函数为:K s U s U i O =)()(,其中12R RK =,参数取R 2=200K ,R 1=100K 。
步骤: 1、连接好实验台,按上图接好线。
2、调节阶跃信号幅值(用万用表测),此处以1V 为例。
调节完成后恢复初始。
3、Ui 接阶跃信号、Uo 接IN 采集信号。
4、打开上端软件,设置采集速率为“1800uS”,取消“自动采集”选项。
5、点击上端软件“开始”按键,随后向上拨动阶跃信号开关,采集数据如下图。
图1-2 比例环节阶跃响应(2)积分环节图1-3 积分环节模拟电路图积分环节的传递函数为:ST V V I I O 1-=,其中T I =RC ,参数取R=100K ,C=0.1µf 。
步骤:同比例环节,采集数据如下图。
图1-4 积分环节阶跃响应(3)微分环节图1-5 微分环节模拟电路图200KRV IVoC2CR 1V IVo200K微分环节的传递函数为:K S T S T V V D D I O +-=1,其中 T D =R 1C 、K=12R R。
参数取:R 1=100K ,R 2=200K ,C=1µf 。
步骤:同比例环节,采集数据如下图。
图1-6 微分环节阶跃响应(4)惯性环节图1-7 惯性环节模拟电路图惯性环节的传递函数为:1+-=TS K V V I O ,其中2T R C =,21RK R =-。
南理工控制工程基础实验报告

南理工控制工程基础实验报告成绩:《控制工程基础》课程实验报告班级:学号:姓名:南京理工大学2015年12月《控制工程基础》课程仿真实验一、已知某单位负反馈系统的开环传递函数如下G(s)?10 s2?5s?25借助MATLAB和Simulink完成以下要求:(1) 把G(s)转换成零极点形式的传递函数,判断开环系统稳定性。
>> num1=[10]; >> den1=[1 5 25]; >> sys1=tf(num1,den1) 零极点形式的传递函数:于极点都在左半平面,所以开环系统稳定。
(2) 计算闭环特征根并判别系统的稳定性,并求出闭环系统在0~10秒内的脉冲响应和单位阶跃响应,分别绘出响应曲线。
>> num=[10];den=[1,5,35]; >>sys=tf(num,den); >> t=[0::10]; >> [y,t]=step(sys,t); >> plot(t,y),grid >> xlabel(‘time(s)’) >> ylabel(‘output’) >> hold on; >> [y1,x1,t]=impulse(num,den,t); >> plot(t,y1,’:’),grid (3) 当系统输入r(t)?sin5t时,运用Simulink搭建系统并仿真,用示波器观察系统的输出,绘出响应曲线。
曲线:二、某单位负反馈系统的开环传递函数为:6s3?26s2?6s?20G(s)?4频率范围??[,100] s?3s3?4s2?2s?2 绘制频率响应曲线,包括Bode图和幅相曲线。
>> num=[6 26 6 20]; >> den=[1 3 4 2 2]; >> sys=tf(num,den); >> bode(sys,{,100}) >> grid on >> clear; >> num=[6 26 6 20]; >> den=[1 3 4 2 2]; >> sys=tf(num,den); >> [z , p , k] = tf2zp(num, den); >> nyquist(sys) 根据Nyquist判据判定系统的稳定性。
控制工程基础实验报告
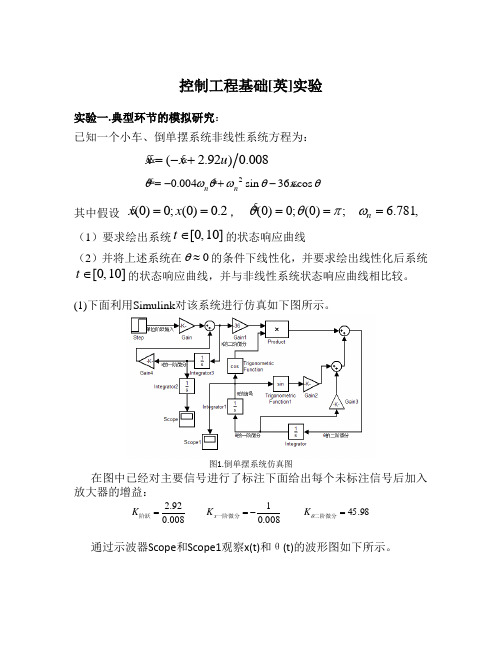
控制工程基础[英]实验实验一.典型环节的模拟研究:已知一个小车、倒单摆系统非线性系统方程为:( 2.92)0.008x x u =-+20.004sin 36cos n n x θωθωθθ=-+-其中假设 (0)0;(0)0.2x x ==,(0)0;(0); 6.781,n θθπω===(1)要求绘出系统[0,10]t ∈的状态响应曲线(2)并将上述系统在0θ≈的条件下线性化,并要求绘出线性化后系统[0,10]t ∈的状态响应曲线,并与非线性系统状态响应曲线相比较。
(1)下面利用Simulink 对该系统进行仿真如下图所示。
图1.倒单摆系统仿真图在图中已经对主要信号进行了标注下面给出每个未标注信号后加入放大器的增益:008.092.2=阶跃K 008.01-=一阶微分x K 98.45=二阶微分θK通过示波器Scope 和Scope1观察x(t)和θ(t)的波形图如下所示。
图2.x(t)波形图3.θ(t)波形(2)将上述系统在0θ≈的条件下线性化,则方程组改写成如下形式:( 2.92)0.008x x u=-+20.004sin36n n xθωθωθ=-+-在Simulink中对系统仿真如下所示。
图4.线性化后仿真系统通过示波器模块可以观察输出信号,图形如下图所示。
图5.x(t)输出波形图6.θ(t )输出波形实验二.典型系统时域响应动、静态性能和稳定性研究; 已知系统的开环传递函数为2()11G s s s =++(1)利用已知的知识判断该开环系统的稳定性(系统的特征方程根、系统零极点表示法)。
(2)判别系统在单位负反馈下的稳定性,并求出闭环系统在[0,10]t ∈内的脉冲响应和单位阶跃响应,分别绘制出相应响应曲线。
(1)该系统的特征方程的根、零极点表示的求解代码如下:输出结果如下图所示。
图7.特征方程求根结果图8.零极点分布图从图中可以看出两个极点在虚轴上,所以该系统处于临界稳定状态。
控制工程基础实验报告
控制工程基础实验报告控制工程基础实验报告引言:控制工程是一门涉及自动化、电子、计算机等多个学科的交叉学科,其实验是培养学生动手能力和实践能力的重要环节。
本篇文章将以控制工程基础实验为主题,探讨实验的目的、过程和结果等方面。
实验目的:控制工程基础实验的目的是让学生通过实践了解控制系统的基本原理和方法,培养其分析和解决问题的能力。
通过实验,学生可以掌握闭环控制系统的设计与调试技巧,加深对控制理论的理解。
实验内容:本次实验的内容是设计一个简单的温度控制系统。
系统由温度传感器、控制器和加热器组成。
温度传感器采集环境温度,控制器根据设定的温度值来控制加热器的工作状态,以维持温度在设定值附近。
实验步骤:1. 搭建实验平台:将温度传感器、控制器和加热器按照实验要求连接起来,确保电路正常工作。
2. 设计控制算法:根据控制系统的要求,设计合适的控制算法。
可以采用比例控制、积分控制或者PID控制等方法。
3. 参数调试:根据实验平台和控制算法的特点,调试控制器的参数,使系统能够快速、稳定地响应设定值的变化。
4. 实验数据采集:通过实验平台上的数据采集器,记录系统的输入和输出数据,以便后续分析和评估。
实验结果:经过实验,我们得到了一组温度控制系统的数据。
通过对这些数据的分析,我们可以评估系统的控制性能和稳定性。
在实验中,我们使用PID控制算法,经过参数调试,得到了较好的控制效果。
系统能够在设定值附近稳定工作,并且对设定值的变化能够快速响应。
实验总结:通过这次实验,我们深入了解了控制工程的基本原理和方法。
实践中遇到的问题和挑战,锻炼了我们的动手能力和解决问题的能力。
实验结果表明,合适的控制算法和参数调试是实现良好控制效果的关键。
控制工程实验的重要性不言而喻,它不仅是理论学习的延伸,更是培养学生实践能力的重要途径。
结语:控制工程基础实验是掌握控制工程理论和方法的重要环节。
通过实践,学生能够更好地理解和应用所学知识,提高解决实际问题的能力。
燕山大学控制工程基础实验报告(带数据)
自动控制理论实验报告实验一典型环节的时域响应院系:班级:学号:姓名:实验一 典型环节的时域响应一、 实验目的1.掌握典型环节模拟电路的构成方法,传递函数及输出时域函数的表达式。
2.熟悉各种典型环节的阶跃响应曲线。
3.了解各项参数变化对典型环节动态特性的影响。
二、 实验设备PC 机一台,TD-ACC+教学实验系统一套。
三、 实验步骤1、按图1-2比例环节的模拟电路图将线接好。
检查无误后开启设备电源。
注:图中运算放大器的正相输入端已经对地接了100k 电阻。
不需再接。
2、将信号源单元的“ST ”端插针与“S ”端插针用“短路块”接好。
将信号形式开关设为“方波”档,分别调节调幅和调频电位器,使得“OUT ”端输出的方波幅值为1V ,周期为10s 左右。
3、将方波信号加至比例环节的输入端R(t), 用示波器的“CH1”和“CH2”表笔分别监测模拟电路的输入R(t)端和输出C(t)端。
记录实验波形及结果。
4、用同样的方法分别得出积分环节、比例积分环节、惯性环节对阶跃信号的实际响应曲线。
5、再将各环节实验数据改为如下:比例环节:;,k R k R 20020010== 积分环节:;,u C k R 22000==比例环节:;,,u C k R k R 220010010=== 惯性环节:。
,u C k R R 220010=== 用同样的步骤方法重复一遍。
四、 实验原理、内容、记录曲线及分析下面列出了各典型环节的结构框图、传递函数、阶跃响应、模拟电路、记录曲线及理论分析。
1.比例环节 (1) 结构框图:图1-1 比例环节的结构框图(2) 传递函数:K S R S C =)()( KR(S)C(S)(3) 阶跃响应:C(t = K ( t ≥0 ) 其中K = R 1 / R 0 (4) 模拟电路:图1-2 比例环节的模拟电路图(5)记录曲线:(6)k R k R 20020010==,时的记录曲线:_R0=200kR1=100k_ 10K10KC(t)反相器 比例环节 R(t)(7)曲线分析:比例放大倍数K 与1R 的阻值成正比。
控制工程基础实验报告
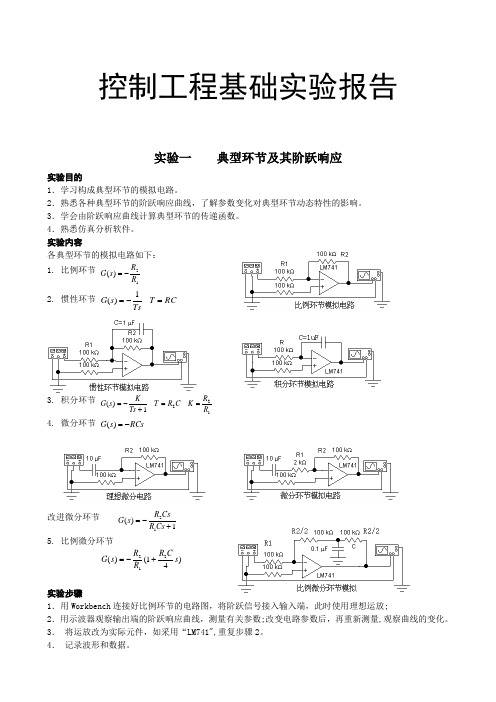
控制工程基础实验报告实验一 典型环节及其阶跃响应实验目的1.学习构成典型环节的模拟电路。
2.熟悉各种典型环节的阶跃响应曲线,了解参数变化对典型环节动态特性的影响。
3.学会由阶跃响应曲线计算典型环节的传递函数。
4.熟悉仿真分析软件。
实验内容各典型环节的模拟电路如下:1. 比例环节 12)(R R s G -=2. 惯性环节 RC T Tss G =-=1)(3. 积分环节 1221)(R R K C R T Ts Ks G ==+-=4. 微分环节 RCs s G -=)(改进微分环节1)(12+-=Cs R Cs R s G 5. 比例微分环节)41()(212s C R R R s G +-=实验步骤1.用Workbench 连接好比例环节的电路图,将阶跃信号接入输入端,此时使用理想运放;2.用示波器观察输出端的阶跃响应曲线,测量有关参数;改变电路参数后,再重新测量,观察曲线的变化。
3. 将运放改为实际元件,如采用“LM741",重复步骤2。
5.仿真其它电路,重复步骤2,3,4。
实验总结通过这次实验,我对典型环节的模拟电路有了更加深刻的了解,也熟悉了各种典型环节的阶跃响应曲线,了解参数变化对典型环节动态特性的影响;熟悉仿真分析软件。
这对以后的控制的学习有很大的帮助。
实验二 二阶系统阶跃响应实验目的1. 研究二阶系统的两个重要参数阻尼比ξ和无阻尼自然频率ωn 对系统动态性能的影响。
2. 学会根据阶跃响应曲线确定传递函数,熟悉二阶系统的阶跃响应曲线。
实验内容二阶系统模拟电路如图: 1)/(1)(12222++-=RCs R R s C R s G 思考:如何用电路参数表示ξ和ωn实验步骤1. 在workbench 下连接电路图;将阶跃信号接入输入端,用示波器观测记录响应信号;2.取ωn=10rad/s,即令R=100K,C=1uf :分别取ξ=0,0.25,0.5,0.7,1,2, 即取R1=100K,考虑R2应分别取何值,分别测量系统阶跃响应,并记录最大超调量δp%和调节时间ts 。
2022年南理工机械院控制工程基础实验报告方案

试验1 模拟控制系统在阶跃响应下特性试验一、试验目根据等效仿真原理,运用线性集成运算放大器及分立元件构成电子模拟器,以干电池作为输入信号,研究控制系统阶跃时间响应。
二、试验内容研究一阶与二阶系统构造参数变化,对系统阶跃时间响应影响。
三、试验成果及理论分析1.一阶系统阶跃响应a.电容值1uF,阶跃响应波形:b.电容值2.2uF,阶跃响应波形:c. 电容值4.4uF ,阶跃响应波形:2. 一阶系统阶跃响应数据表电容值 (uF ) 稳态终值U c (∞)(V ) 时间常数T(s) 理论值 实际值 理论值 实际值 1.0 2.87 2.90 0.51 0.50 2.2 2.87 2.90 1.02 1.07 4.42.872.902.242.06元器件实测参数U r = -2.87VR o =505k ΩR 1=500k ΩR 2=496k Ω其中C R T 2=r c U R R U )/()(21-=∞误差原因分析:①电阻值及电容值测量有误差;②干电池电压测量有误差;③在示波器上读数时产生误差;④元器件引脚或者面包板老化,导致电阻变大;⑤电池内阻影响输入电阻大小。
⑥在C=4.4uF试验中,受硬件限制,读数误差较大。
3.二阶系统阶跃响应a.阻尼比为0.1,阶跃响应波形:b.阻尼比为0.5,阶跃响应波形:c.阻尼比为0.7,阶跃响应波形:d.阻尼比为1.0,阶跃响应波形:4.二阶系统阶跃响应数据表ξR w(Ω)峰值时间t p(s)U o(t p)(V)调整时间t s(s)稳态终值U s(V)超调(%)M p震荡次数N0.1 454k 0.3 4.8 2.8 2.95 62.7 6 0.5 52.9k 0.4 3.3 0.5 2.95 11.9 10.7 24.6k 0.4 3.0 0.3 2.92 2.7 11.02.97k 1.0 2.98 1.0 2.98 0 0四、回答问题1.为何要在二阶模拟系统中设置开关K1和K2,并且必须同步动作?答:K1作用是用来产生阶跃信号,撤除输入信后,K2则是构成了C2放电回路。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验报告课程名称:______化工原理实验___________指导老师:________________成绩:__________________ 实验名称:_____流体流动阻力测定和离心泵的特性曲线测定______实验类型:________________同组学生姓名:___叶天壮、温茂林_______ 一、实验目的和要求(必填) 二、实验内容和原理(必填) 三、主要仪器设备(必填) 四、操作方法和实验步骤 五、实验数据记录和处理 六、实验结果与分析(必填) 七、讨论、心得实验一 流体流动阻力测定一.实验目的和要求。
1) 掌握测定流体流经直管、管件(阀门)时阻力损失的一般实验方法。
2) 测定直管摩擦系数λ与雷诺准数Re 的关系,验证在一般湍流区内λ与Re 的关系曲线。
3) 测定流体流经管件(阀门)时的局部阻力系数ξ。
4) 识辨组成管路的各种管件、阀门,并了解其作用。
二.实验仪器和设备1)实验装置如下图所示1—水箱 2—离心泵 3、10、11、12、13、14—压差传感器 4—温度计 5—涡轮流量计 6—孔板(或文丘里)流量计 7、8、9—转子流量计 15—层流管实验段 16—粗糙管实验段 17—光滑关实验段 18—闸阀 19—截止阀 20—引水漏斗 21、22—调节阀 23—泵出口阀 24—旁路阀(流量校核) a b c d e f g h — 取压点专业:过程装备与控制工程 姓名:____郝春永________学号:____3140104498__ 日期:____2016.12.2__ 地点:____教十1208__实验名称:___流体流动阻力测定____ 姓名:__郝春永___ 学号:______3140104498_________ 2三.实验内容和原理1).雷诺数:Re du ρμ= ⑴2900Vu dπ=⑵ 采用涡轮流量计测流体流量V (m 3/h ) 2).直管阻力摩擦系数λ的测定流体在水平等径直管中稳定流动时,阻力损失为:2122ff p p p l u h d λρρ∆-=== ⑶即22fd p luλρ∆=⑷f p ∆-直管(长度l )的压降。
Pa ;用压差传感器测量。
3).局部阻力系数ζ的测定(阻力系数法): 流体通过某一管件(阀门)时的机械能损失可表示为流体在小管径内流动时平均动能的某一倍数。
即:'2'2ffp u h g gζρ∆== ⑸ 故'22fp u ζρ∆=⑹f p '∆ -局部阻力压力降,Pa ;局部阻力压力降的测量方法:测量管件及管件两端直管(总长度'l )总的压降p ∑∆,减去其直管段的压降,该直管段的压降可由直管阻力f p ∆(长度l )实验结果求取。
装订线实验名称:___流体流动阻力测定____姓名: ___郝春永____ 学号:______3140104498_________ff P ll p p ∆-∑∆='∆' ⑺p ∑∆-包含管件(阀门)与直管(长度为'l )的压降,Pa ;用压差传感器测量。
3.4 流量计校核通过计时称重对涡轮流量计读数进行校核。
四.实验方法和步骤1) 离心泵通过引水漏斗(20)灌水,关闭出口阀(23),打开电源,启动水泵电机,待电机转动平稳后,把泵的出口阀(23)缓缓开到最大。
2) 对压差传感器进行排气,完成后关闭排气阀门,使压差传感器处于测量状态。
3) 开启流量调节阀(21),合理分配流量。
每次改变流量,待流动达到稳定后,记录压差、流量、温度等数据。
4) 实验结束,关闭出口阀(23),停止水泵电机,清理装置。
五.实验结果与分析1) 根据光滑管、粗糙管的实验结果,在双对数坐标系上拟合出λ~Re 的关系曲线,对照理论教材上的相关曲线图,估算出该管路的相对粗糙度和绝对粗糙度。
装订线根据实验数据整理可得:对照莫狄图可得,光滑管相对粗糙度约为0.0006,即绝对粗糙度约0.0126mm。
粗糙管相对粗糙度约为0.06,即相对粗糙度约1.32mm。
2).根据上表中的处理结果可得,截止阀的局部阻力系数为11.1,闸阀的局部阻力系数为0.776,查表可得截止阀全开时ζ=6.0,1/2开时ζ=9.5,闸阀全开时ζ=0.17,3/4开时为0.9,因不知道截止阀和闸阀的开度,所以无法判断出实验结果与实际结果的误差。
3).出现误差的原因有两个:1.在阀门处积累的有污垢导致局部阻力系数变大2.在流体流动过程中流体内含有部分气泡,使得测量数据不准确4).实验心得与体会通过此次实验发现了自己对于实验的不足之处,首先在于上实验之前对实验内容没有认真地预习导致做实验的时候效率低还犯了一些常识性的错误,以后做实验应该养成良好的实验习惯,对实验内容和实验装置以及原理都要清楚,其次在实验过程中通过与队友的合作来完成实验也增加了团队协作能力,每个人都各尽其用,对实验结果和流程的分析也加深了对流体流动过程的理解和应用。
六.思考题。
1)在对装置做排气工作时,是否一定要关闭流程尾部的出口阀?为什么?对装置进行排气时先打开出口阀待流体稳定流动之后关闭出口阀,使管内获得较大的压力便于排气,因此排气时要关闭出口阀。
2)如何检测管路中的空气已经被排除干净?先检查连接连接软管和传感器的出口管中有没有气泡,如果没有则关闭进口阀观察压差计,压差计为零则没有气泡。
3)以水做介质所测得的λ~Re关系能否适用于其它流体?如何应用?适用于其他流体,因为λ只与雷诺数和管壁粗糙度有关。
应用于其它流体时,只需要计算出对应条件下流体的雷诺数即可得到相应流体的λ。
4)在不同设备上(包括不同管径),不同水温下测定的λ~Re数据能否关联在同一条曲线上?不同设备相对粗糙度如果相同则可以关联在同一曲线上,否则不能关联在同一曲线上。
5)如果测压口、孔边缘有毛刺或安装不垂直,对静压的测量有何影响?对静压测量无影响,因为静压只与高度有关。
实验二离心泵特性曲线测定一.实验目的和要求1)了解离心泵结构与特性,熟悉离心泵的使用;2)测定离心泵在恒定转速下的操作特性,做出特性曲线;3)了解差压变送器、涡轮流量计等仪器仪表的工作原理和使用方法。
二.实验仪器和设备实验流程图见实验一。
实验装置是由贮水箱、离心泵,涡轮流量计和压差传感器等组成的。
采用压差传感器(3)进行测量,泵的轴功率由水的流量使用涡轮流量计进行测量,泵进出口压差p功率表测量,流体温度采用Pt100温度传感器测量。
三.实验内容和原理离心泵的特性曲线是选择和使用离心泵的重要依据之一,其特性曲线是在恒定转速下泵的扬程H、轴功率N及效率η与泵流量Q之前的关系曲线,它是流体在泵内流动规律的宏观表现形式。
由于泵内流动复杂,不能使用理论方法推导出泵的特性关系曲线,只能依靠实验测定。
3.1 扬程H的测定与计算取离心泵进口真空表和出口压力表处为1、2两截面(流程图中的h和g),列机械能衡算方程:2211221222p u p u z H z g g g gρρ+++=++ ⑴若泵进出口速度相差不大,则速度平方差可忽略,则有2121()p p H z z gρ-=-+= H 0+ ΔP/ρg ⑵式中:021H z z =-,表示泵出口(g )和进口(h )的位差,本实验为0.1m ; ρ——流体密度,kg/m 3; g ——重力加速度,m/s 2;p 1、p 2——分别为泵进口的真空度和泵出口的表压,Pa ; u 1、u 2——分别为泵进、出口的流速,m/s ;z 1、z 2——分别为真空表、压力表的安装高度,m ;ΔP——泵的出口和进口之间的压差,Pa ,用压差传感器测量。
3.2轴功率N 的测量与计算⑶其中,3.3效率η的计算泵的效率η是泵的有效功率Ne 与轴功率N 的比值。
有效功率Ne 是单位时间内流体经过泵时所获得的实际功,轴功率N 是单位时间内泵轴从电机得到的功,两者差异反映了水力损失、容积损失和机械损失的大小。
泵的有效功率Ne 可用下式计算:Ne HQ g ρ= ⑷故泵效率为 100%HQ gNρη=⨯ ⑸ 3.4转速改变时的换算泵的特性曲线是在定转速下的实验测定所得。
但是,实际上感应电动机在转矩改变时,其转速会有变化,这样随着流量Q 的变化,多个实验点的转速n 将有所差异,因此在绘制特性曲线之前,须将实测数据换算为某一定转速n’下(可取离心泵的额定转速)的数据。
流量 ''n Q Q n= ⑹扬程''2()nH Hn=⑺轴功率''3()nN Nn=⑻效率''''Q H g QH gN Nρρηη===⑼四.操作方法和实验步骤1)离心泵通过引水漏斗(20)灌水,关闭泵出口阀(23),开启仪表柜上的总电源、仪表电源开关,启动水泵,待电机转动平稳后,把泵的出口阀(23)缓缓开到最大。
2)对压差传感器进行排气,完成后关闭排气阀门,使压差传感器处于测量状态。
3)缓缓开启流量调节阀(22),合理分配流量。
每次改变流量,待流动达到稳定后,记录压差、流量、电机功率、流体温度、转速等数据。
记录设备数据(如离心泵型号,额定流量、扬程和功率等)。
4)实验结束,关闭泵出口阀(23),关闭水泵电机,关闭仪表电源和总电源开关,将装置恢复原状。
五.实验结果与分析。
1).在同一坐标系拟合出一定转速下泵的特性曲线(H ~Q ,N ~Q ,η~Q )。
通过整理数据可得:通过整理数据可得,离心泵的特性曲线如下:2). 分析实验结果,判断泵的最适宜的工作范围。
由上图可知在流量为6.5m^3/h 时,效率最大为45%,这点为设计点,但是离心泵不可能总是在设计点而是在设计点附近,所以最适宜的工作范围为4~8.5m^3/h ,工作效率为40%~45%。
3) .实验心得通过此次实验加深了对离心泵的扬程,轴功率,效率和流量之间的关系,对离心泵的特性曲线有了进一步的认知,并在数据处理的过程中把理论与实际实验结合起来,使实验更有意义。
六.思考题1) 试从所测试验数据分析,离心泵在启动时为什么要关闭出口阀门?从图中可以看出,轴功率随流量的增大而增大,当流量为零时,功率最小,若开机时阀门开大,则电机的瞬时功率很大,会对电机造成损害。
因此,离心泵应在出口阀关闭时启动,以防止电机过载。
2) 启动离心泵之前为什么要引水灌泵?如果灌泵后仍然启动不起来,你认为可能的原因是什么?泵内加水有利于排出吸入室内的空气形成足够大的真空把液体吸进来。
如果加水后泵仍然不能吸入水可能是引水阀门未关闭,在阀门处形成负压,把空气吸入泵内形成空气缚。
3)为什么用阀门(22)调节流量?这种方法有什么优缺点?是否还有其他方法调解流量?使用出口阀调节流量不会使管内产生气泡,若使用进口阀调节当流量减小时,流体不会充满整个管对实验结果有影响,调节出口阀简单易行结果精确,但是缺点是在阀门处会消耗一定的能量。