菱MRJB伺服放大器应用实例
东菱伺服应用案例数控机床应用案例
东菱伺服在数控行业应用Dorna servo application in the NC industry1引言数控技术是数字程序控制数控机械实现自动工作的技术。
它广泛用于机械制造和自动化领域,较好地解决多品种、小批量和复杂零件加工以及生产过程自动化问题。
随着计算机、自动控制技术的飞速发展,数控技术已广泛地应用于数控机床、机器人以及各类机电一体化设备上。
同时,社会经济的飞速发展,对数控装置和数控机械要求在理论和应用方面有迅速的发展和提高。
伺服系统是数控机床的重要组成部分,数控机床的精度和速度指标等往往由伺服系统决定。
随着技术的发展,高精度、高性能的交流伺服已成为伺服系统发展的新趋势。
2 概述数控车床又称为 CNC车床,即计算机数字控制车床,是目前国内使用量最大,覆盖面最广的一种数控机床,一般由输入、输出装置、数控装置、伺服系统、检测反馈装置和机床主机等组成。
它是数控机床的主要品种之一,解决了大部分机械零件的自动化加工问题成为最主要的机械加工设备,在数控机床中占有非常重要的位置,几十年来一直受到世界各国的普遍重视并得到了迅速的发展。
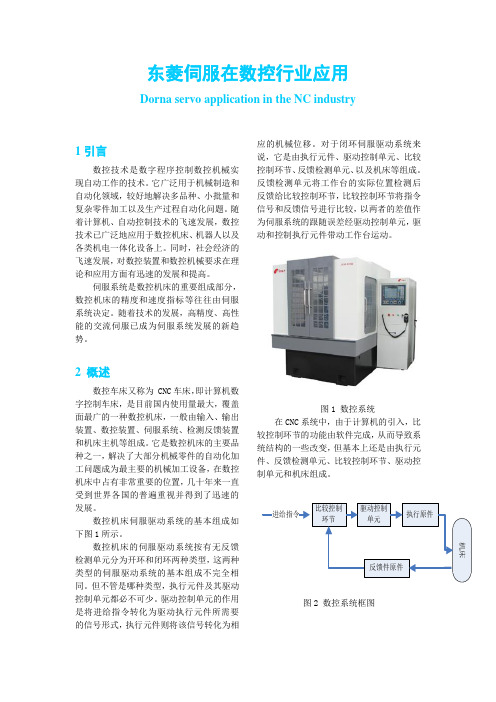
数控机床伺服驱动系统的基本组成如下图1所示。
数控机床的伺服驱动系统按有无反馈检测单元分为开环和闭环两种类型,这两种类型的伺服驱动系统的基本组成不完全相同。
但不管是哪种类型,执行元件及其驱动控制单元都必不可少。
驱动控制单元的作用是将进给指令转化为驱动执行元件所需要的信号形式,执行元件则将该信号转化为相应的机械位移。
对于闭环伺服驱动系统来说,它是由执行元件、驱动控制单元、比较控制环节、反馈检测单元、以及机床等组成。
反馈检测单元将工作台的实际位置检测后反馈给比较控制环节,比较控制环节将指令信号和反馈信号进行比较,以两者的差值作为伺服系统的跟随误差经驱动控制单元,驱动和控制执行元件带动工作台运动。
图1 数控系统在CNC系统中,由于计算机的引入,比较控制环节的功能由软件完成,从而导致系统结构的一些改变,但基本上还是由执行元件、反馈检测单元、比较控制环节、驱动控制单元和机床组成。
三菱MR-JE-B系列伺服放大器的功能

三菱MR-JE-B系列伺服放大器的功能[模型适用控制]实现了接近理想模型的高响应、稳定控制。
2自由度型模型适用控制,可以单独设定对指令的响应和对外部干扰的响应。
并且,可以将该功能设为无效。
[位置控制模式] 该伺服放大器作为位置控制伺服使用。
[速度控制模式] 该伺服放大器作为速度控制伺服使用。
[转矩控制模式] 该伺服放大器作为转矩控制伺服使用。
[高分辨率编码器]MELSERVO-JE系列支持的旋转式伺服电机的编码器使用的是131072pulses/rev高分辨率编码器。
[绝对位置检测系统]只需进行一次原点设定,此后无需每次接通电源时都进行原点复位操作。
[增益切换功能] 不仅可以切换旋转中和停止时的增益,还可以在运行中使用输入软元件进行增益的切换。
[高级振动抑制控制Ⅱ] 抑制机械臂部前端的振动或残留振动的功能。
[机械共振控制滤波器] 通过降低特定频率的增益来抑制机械系统共振的滤波器功能(陷波滤波器)。
[轴共振控制滤波器]伺服电机加载负载时,由于伺服电机驱动时轴转动产生的共振,可能会发生高频率的机械振动。
轴共振抑制滤波器是抑制该振动的滤波器。
[自适应性滤波器Ⅱ] 检测出伺服放大器的机械共振后自动设定滤波器特性,抑制机械振动的功能。
[低通滤波器] 提高伺服系统的响应性,会对高频率共振有抑制效果。
[机械分析功能]仅通过连接安装有MR Configurator2的计算机与伺服放大器,就可以分析机械的频率特性。
使用该功能时,需要MR Configurator2。
[鲁棒滤波器] 当因辊轮进给轴等负载惯量较大而不能提高响应性时,可以提高对干扰的响应。
[微振动抑制控制] 在伺服电机停止时,抑制±1脉冲的振动。
[自动调谐] 即使加载在伺服电机轴上的负载变化,也能将伺服放大器的增益自动调整到最佳。
[再生选件] 在因发生的再生功率较大,而伺服放大器的内置再生电阻器的再生能力不足时使用。
[报警历史清除] 清除报警历史。
伺服放大器使用说明书

伺服放大器使用说明书一、概述伺服放大器是自动控制系统中的一个重要组成单元,和电动执行机构配套,组成比例式电动控制机构,可广泛用于电力、冶金、化工、轻工等工业部门的自动控制系统中。
它可与DDZ-S系列电动执行机构配套,也可作为一个通用单元,应用在其它类型的电动执行机构上。
与其它类型的伺服放大器比较,有如下特点:1.电路采用智能控制系统对输入电流与反馈电流进行采样、比较,依据它们的差值大小对电机进行正反转控制。
2.系统对死区和精度进行自动调节,使控制品质最优。
3.也可手动调节死区大小以适应现场实际要求。
4.具有输入信号断路或小于一定值、位置反馈信号断路或小于一定值、反馈信号不跟随或反向变化大于一定值或固态继电器输出短路时,系统自动保护防止执行机构动作错误的功能以及开路报警、断电抱闸等功能。
二、主要技术指标1.输入信号:4~20mA2.阀位反馈输入信号:4~20mA3.输入通道:2个4.输入阻抗:250Ω5.输出功率:220VAC5A6.最大误差:2.5%7.报警输出:无源接点1常开1常闭8.工作电压:220VAC50Hz9.工作条件:环境温度0~50℃相对湿度〈85%三、接线端子图2-b9 电流输入+2-a9 电流输入-2-b11 阀位反馈输入+2-a11 阀位反馈输入-2-b3 故障状态信号输出端常闭点2-b4 常开点2-b5 公共点1-b13 接大地1-a8 火线1-a7.10 零线1-a5 接电机正转线圈1-b3 接电机反转线圈1-b8 接抱闸线圈注意: 电机接线要分清正反,正转时阀门开大,反转时阀门关小,并且阀门开度要与位返电流变化方向一致。
四、仪表的调试仪表功能性测试用两路信号源作输入信号,三个220V灯泡作负载, 2-b9 2-a9 输入一路4~20mA信号2-b11 2-a11 输入另一路4~20mA信号1-a5 1-a7 接一灯泡定义为D11-b3 1-a7 接一灯泡定义为D21-b8 1-a7 接一灯泡定义为D3正确接线后通电1、当输入电流IN大于反馈电流WF时D1灯亮2、当输入电流IN等于反馈电流WF时灯不亮3、当输入电流IN小于反馈电流WF时D2灯亮4、当输入电流IN或反馈电流WF的值小于3.5mA或断路时面板上黄灯亮,同时系统切断总电源并且送出抱闸信号(D3灭)和报警信号(常闭接点断开)。
三菱电机MR-J4全闭环控制的连接
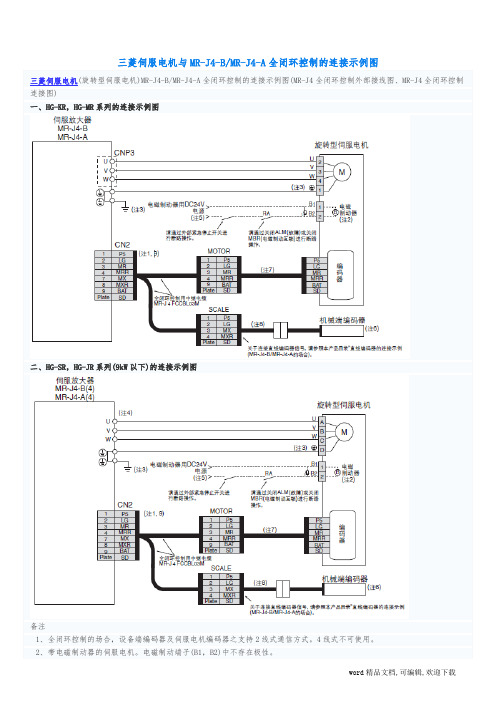
三菱伺服电机与MR-J4-B/MR-J4-A全闭环控制的连接示例图三菱伺服电机(旋转型伺服电机)MR-J4-B/MR-J4-A全闭环控制的连接示例图(MR-J4全闭环控制外部接线图、MR-J4全闭环控制连接图)一、HG-KR,HG-MR系列的连接示例图二、HG-SR,HG-JR系列(9kW以下)的连接示例图备注1、全闭环控制的场合,设备端编码器及伺服电机编码器之支持2线式通信方式。
4线式不可使用。
2、带电磁制动器的伺服电机。
电磁制动端子(B1,B2)中不存在极性。
3、请通过控制盘的保护接地(PE)端子,转接伺服放大器的保护接地(PE)端子,使之接地。
4、根据伺服放大器的容量不同,接头或端子也各不相同。
5、不可将接口用DC24V电源兼用作电磁制动器用电源,请务必为其配置专用品。
6、关于直线编码器,请参照MR-J4伺服驱动&电机用户手册目录中目录的3.直线电机“直线编码器一览”。
有关使用旋转编码器的全闭环功能,请参照各伺服放大器技术资料集。
7、三菱提供配套的编码器电缆。
8、根据设备端编码器不同,所需编码器电缆也各不相同,请参照各技术资料集。
9、通过MR-J4-B/MR-J4-A(4)伺服放大器构建全闭环控制系统的场合,CN2接头中,请务必连接使用MR-J4FCCBL03M中继电缆或MR-J3THMCN2接头套件制作的中继电缆。
三、HG-JR系列(11kW、15kW)的连接示例图备注1、在全闭环控制下,设备端编码器以及伺服电机编码器仅支持2线式的通信方式。
无法使用4线式。
2、带电磁制动器的伺服电机。
电磁制动端子(B1,B2)中不存在极性。
3、请通过控制柜的保护接地(PE)端子,转接伺服放大器的保护接地(PE)端子进行接地。
4、不可将接口用DC24V电源兼用作电磁制动器用电源,请务必为其配置专用品。
5、有关直线编码器的详细信息,请参MR-J4伺服驱动&电机用户手册目录中目录的3.直线电机的“直线编码器一览”。
三菱MR-JE-B伺服手册

三菱 通用 AC伺服SSCNETⅢ/H接口型号MR-JE-_B伺服放大器技术资料集使用前请务必阅读。
在安装、运行、维护及检查前,请务必熟读本技术资料集、使用手册及相关资料,以便正确使用。
请在熟读机器的相关知识、安全信息及注意事项的所有内容后进行使用。
本技术资料集中,分为“危险”与“注意”两类安全注意事项。
危险 操作错误时,可能引起危险,造成死亡或重伤。
注意 操作错误时,可能引起危险,造成中度伤害、轻度伤害或财产损失。
此外,即使注意事项中记载的内容,有时也有造成严重后果的可能性。
两者所记均为重要内容,请务必遵守。
禁止及强制图表的表示内容如下所示。
表示禁止(严禁采取的行为)。
比如“严禁烟火”为。
表示强制(必须采取的行为)。
比如需要接地为。
在本技术资料集中,对不会造成财产损失的注意事项及其它功能等的注意事项作为“要点”进行区分。
仔细阅读本手册后请妥善保管,以便使用者可以随时取阅。
1.防止触电危险因为有触电的危险,所以请在关闭电源并经过15分钟以上,请确认充电指示灯熄灭后再进行接线作业或检查。
而且,确认充电指示灯是否熄灭时,请务必在伺服放大器的正面进行。
伺服放大器及伺服电机必须确保接地良好。
接线作业或检查应由专业技术人员进行。
伺服放大器及伺服电机请在安装后再接线。
否则会造成触电。
请勿用湿手操作开关。
否则会造成触电。
请勿损伤电缆、对其施加过大应力、在其上放置重物或挤压等。
否则会造成触电。
为了防止触电,请务必将伺服放大器的保护接地(PE)端子(带有符号的端子)连接到控制柜的保护接地(PE)上。
使用漏电断路器(RCD)时,请选用B型。
为避免触电,请在电源端子的连接部进行绝缘处理。
2.防止火灾注意请将伺服放大器、伺服电机、再生电阻安装在不可燃物上。
直接安装在可燃物上或安装在靠近可燃物的地方,可能会造成冒烟及火灾。
在电源和伺服放大器的电源(L1・L2・L3)间请务必连接电磁接触器,在伺服放大器的电源侧形成可以切断电源的结构。
三菱伺服MR-MR-E-AG伺服放大器使用手册

0.8
0.8
1.2
1.8
1.8
2.0
1.8
1.8
2.6
4.0
4.0
4.4
选择 3
连接器 针号 CN1-3
CN1-5
CN1-5
CN1-3
功能 /应用
用于使伺服电机按下表所示的方向起动。
(注)输入信号
ST2
ST1
伺服电机起动方向
0
0
0
1
1
0
1
1
停止(伺服锁定) 逆时针 顺时针
停止(伺服锁定)
注 . 0: ST1/ST2-SG off(开 路 ) 1: ST1/ST2-SGon(短 路 )
交流 50~60Hz。
200~230V,
50~60Hz
三相交流 200~230V:170 至 253V。 三相交流 170 至
单相交流 230V:207 至 253V。
253V。
±5%
正弦波 PWM 控制,电流控制系统。
内藏式
过电流断路,再生过电压断路,过载断路(电热继电器),
编码器出错保护,再生制动器出错保护,欠电压、瞬时失电
符号
SA
VLC
TLC
ALM RD ZSP MBR WNG ACD0 ACD1 ACD2 OP
LA LAR LB LAR LZ LZR MO1 MO2
连接器 针号
CN1-9 CN1-11 CN1-12 [CN1-12]
功能/应用
当伺服电机的转速已接近达到 预设速度时,SA-SG 间连接。 当预设转速小于等于 50r/min 时,SA-SG 间保持连接。 在转矩控制模式条件下,如果 转速达到内部速度极限 1~7(8 号至 10 号、72 号至 75 号参数) 所限制的值时,VLC 变为 ON。 当伺服 ON(SON)变为 OFF 时, VLC 变为 OFF。 当所产生的转矩达到惯性转矩 极限 1(28 号参数)的设置值 或模拟转矩极限(TLA)值时, TLC 变为 ON。当“伺服 ON”(SON) 变为 OFF 时,TLC 变为 OFF。 与 MR-E-□A 相同
伺服电机的选型计算及应用案例介绍
1.滚珠丝杆的质量: Bw=ρxV=7.9*103*π(0.02/2)2*0.5
=1.24kg
2.负载部分的惯量:
JL=JC+JB=JC+BW*BD2/8+WA*BP2/4π2 =0.00001+(1.24*0.022)/8+10*0.022/4π2 =1.73*10-4kg.m2
3.预选电机
若选200W,则JM= 0.14*10-4kg.m2
六.实例应用讲解
案例1
已知:负载重量WA=10kg,螺杆螺距BP=20mm,螺杆直径 BD=20mm,螺杆长BL=0.5m,机械效率η=0.9,摩擦系数 μ=0.1,负载移动距离0.3m,加减速时间ta=td=0.1s,匀速 时间tb=0.8s,静止时间t4=1s。联轴器的惯量Jc= 10x10-6 kg.m2 .请选择满足负载需求的最小功率伺服电机。
2.与转动惯量有关的因素:
1.刚体的总质量 2.质量分布 3.转轴的位置
3.转动惯量的计算: (1)单个质点的转动惯量: J=mr2
(2)质量离散分布刚体的转动惯量:
J m jrj2 m1r12 m2r22 j
r2 m2
(3)质量连续分布刚体的转动惯量:
r1
m1
r3 m3
转轴
J r2dm dm:质量元
4.电机转速和扭矩(转矩)公式
扭矩公式:T=9550P/n
T是扭矩,单位N·m; P是输出功率,单位KW; n是电机转速,单位r/min
扭矩公式:T=973P/n
T是扭矩,单位kg·m; P是输出功率,单位KW; n是电机转速,单位r/min
5.扭矩计算
电机转矩T (N.m)
滑轮半径r (m)
伺服放大器原理及功能介绍
伺服放大器原理及功能介绍伺服放大器(Servo Amplifier)是一种用来控制电机或执行器的电子设备。
它可以根据输入信号的变化,调整输出信号的幅值或相位,以实现对电机或执行器的精确控制。
在很多自动化系统中,伺服放大器是关键的控制组件,可用于实现运动控制、位置控制、力控制等功能。
伺服放大器的原理是通过负反馈控制来实现精确的位置或速度控制。
通常情况下,伺服放大器会接收一个控制信号,该信号可以是电压、电流或脉冲等形式。
根据这个控制信号,伺服放大器会输出一个相应的信号来驱动电机或执行器。
同时,伺服放大器会不断监测输出的位置或速度,并与输入的控制信号进行比较,通过不断调整输出信号的幅值或相位,使得输出的位置或速度与输入信号的要求尽可能地一致。
1.位置控制:伺服放大器可以通过对输入信号进行处理,实现对电机或执行器的位置控制。
一般来说,位置控制可以通过控制输入信号的幅值和相位来实现。
当输入信号达到一定的幅值时,伺服放大器会输出相应的信号来驱动电机或执行器,使其移动到相应的位置。
通过不断监测输出的位置,并与输入信号进行比较,伺服放大器可以自动调整输出信号的幅值和相位,以实现更加准确的位置控制。
2.速度控制:除了位置控制,伺服放大器还可以实现对电机或执行器的速度控制。
通过控制输入信号的幅值和相位,伺服放大器可以调整输出信号的频率和幅值,从而控制电机或执行器的运动速度。
当输入信号的幅值和相位发生变化时,伺服放大器可以快速地调整输出信号的频率和幅值,以实现对电机或执行器速度的准确控制。
3.力控制:对一些应用来说,精确控制电机或执行器的力量是非常重要的。
伺服放大器可以通过调整输出信号的幅值和相位,实现对电机或执行器的力量控制。
当输入信号的幅值发生变化时,伺服放大器会自动调整输出信号的幅值和相位,以匹配输入信号的变化,从而实现对电机或执行器力量的准确控制。
4.压力控制:在一些应用中,需要对电机或执行器的输出压力进行控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
菱M R J B伺服放大器
应用实例
SANY标准化小组 #QS8QHH-HHGX8Q8-GNHHJ8-HHMHGN#
三菱MR-J3-40B伺服放大器应用实例
本人设计一套空间曲线自动焊接设备时用到了三菱MR-J3-40B伺服放大器,现将设计与使用心德与大家分享如下。
本空间曲线焊接设备控制系统包括三菱Q系列CPU、输入模块、输出模块、QD75MH4定位模块、人机界面和3个MR-J3-40B伺服放大器及电机。
三菱MR-J3-40B伺服放大器使用主要包括电气接线、外围开关设定和参数程序设定调试等三部分。
1 电气接线
三菱MR-J3-40B伺服放大器及电机电气连接图如图1所示。
图1 MR-J3-40B伺服放大器及电机电气连接图三个伺服放大器主电路为AC220V供电,控制电路用SSCNETIII光纤通信总线电缆菊花型连接。
通过SSCNETIII电缆可以最大限度地节省配线,两站之间的最大连接距离可达50米。
MR-J3-40B伺服放大器与HF-KP43伺服电机之间接
线如图2所示,伺服电机HF-KP43与伺服放大器MR-J3-40B编码器接口针脚号及接线方式如图3所示。
图2 伺服与电机之间动力线接线图
图3 伺服与电机之间编码器接线图
根据上述方法连接好伺服放大器及电机的线缆后伺服放大器如图4所示。
图4 接好线后的伺服放大器
2 外围开关设置
MR-J3-40B伺服放大器外围开关设定:正常运行时,拔码开关SW2均需拔在Down。
根据伺服放大器所处位置及位置模块的定义,SW1选择伺服放大器所对应的轴:SW1=0时对应第一轴,SW1=1时对应第二轴,以此类推,SW1=15时对应第十六轴。
本实例中回转伺服SW1=0,升降伺服SW1=1,伸缩伺服SW1=2。
如图5所示。
本系统采用绝对位置定位,所以伺服放大器需配绝对位置记忆的电池,伺服放大器的CN4接口接电池,电池如图6所示。
图5 伺服放大器外围开关
图6 MR-J3-40B伺服放大器绝对位置记忆电池
3 参数程序设定调试
伺服放大器外围接线完成并外围开关设定好之后,就可以接通伺服放大器电源,点亮伺服放大器,此时有两种方法可以设定伺服放大的的参数,一种是通过CN5口用电脑将设定好的参数下载到伺服放大器中,另一种方式是在GX-Works2中的通过编程的方式进行参数设定后下载到Q系列PLC中,再通过QD75MH4模块的SSCNETIII光纤通信总线控制伺服放大器。
本例是采用后一种方式。
参数部分设定画面及部分程序如图7、8、9、10所示。
图7 参数设定画面
图8 伺服参数设定画面
图9 轴定位数据设定画面
图10 部分程序梯形图
将GX-Works2中编好的程序下载到Q系列PLC中,然后调试程序及动作,调试心德总结如下:
1、MR-J3-40B伺服放大器内部主要分为整流模块和控制模块,整流模块可
以通过万用表量通断的方法判断是否有损坏或故障,具体方法如下:用指针万用表量P、N分别对电源输入的L1、L2、L3和电源输出的U、V、W的阻值
(如没有指针万用表也可以用数字万用表代替),P黑表笔对U、V、W红表笔的电阻约445Ω,P黑表笔对L1、L2、L3红表笔的电阻值无限大,N红表笔对U、V、W黑表笔的电阻值约445Ω,N红表笔对L1、L2、L3黑表笔的电阻值约530Ω)。
2、定位模块QD75MH4、伺服放大器MR-J3-40B、伺服电机HF-KP43连接好通
电后,伺服电机不能正常转矩保持,用手旋转电机轴,电机轴会来回振动,此时,首先检查伺服电机与伺服驱动器之间的U、V、W接线是否完全正确,再检查编码器接线,如果都没有问题,可以通过增大伺服参数中自动调谐响应性的值来增大保持转矩。
3、HF-KP43伺服电机在与伺服驱动器连接时或得电一段时间断电后,手动
旋转电机轴会感觉有点发卡,长时间断电后会恢复正常,所以一般情况下不要判断为伺服电机有问题。
4、MR-J3-40B伺服放大器用绝对位置定位第一次接通电源,会报绝对位置
丢失(25)错误,报警可以通过切断电源并再次接通电源而解除,报警解除后再次设定原点位置。
5、将地址1-600的运行模式改为轨迹,实现…的循环,循环过程中实时改
变1-600定位地址中的值,以满足绝对定位时多圈焊接,但注意定位地址值有一固定范围,不能超过。
6、可以通过参数中每转的移动量来调试电机转一转机械执行机构运行的距
离。
7、可以通过GX-Works2中工具→智能功能模块用工具→QD75型定位模块中
的定位监视及定位测试进行伺服测试和运行监视(调试过程中,用定位数据定位时,600个地址中有两个定位方式选错,运行时总是出现异常反转,检测程序及参数没有发现错误,如此折腾了两天,后来通过定位监视中看出有两个定位方式错选为增量方式)。
系统一些相关图片如下:
PLC系统
三个MR-J3-40B伺服放大器
HF-KP43伺服电机
HF-KP43B带制动伺服电机
三个伺服电机
系统调试中
系统电控箱。