两轮自平衡小车的设计
两轮自平衡小车双闭环PID控制设计
两轮⾃平衡⼩车双闭环PID控制设计两轮⾃平衡⼩车的研究意义1.1两轮平衡车的研究意义两轮平衡车是⼀种能够感知环境,并且能够进⾏分析判断然后进⾏⾏为控制的多功能的系统,是移动机器⼈的⼀种。
在运动控制领域中,为了研究控制算法,建⽴两轮平衡车去验证控制算法也是⾮常有⽤的,这使得在研究⾃动控制领域理论时,两轮平衡车也被作为课题,被⼴泛研究。
对于两轮平衡车模型的建⽴、分析以及控制算法的研究是课题的研究重点和难点。
设计的两轮平衡车实现前进、后退、转弯等功能是系统研究的⽬的,之后要对车⼦是否能够爬坡、越野等功能进⾏测试。
⼀个⾼度不稳定,其动⼒学模型呈现多变量、系统参数耦合、时变、不确定的⾮线性是两轮平衡车两轮车研究内容的难点,其运动学中的⾮完整性约束要求其控制任务的多重性,也就是说要在平衡状态下完成指定的控制任务,如在复杂路况环境下实现移动跟踪任务,这给系统设计带来了极⼤的挑战。
因此可以说两路平衡车是⼀个相对⽐较复杂的控制系统,这给控制⽅法提出了很⾼的要求,对控制理论⽅法提出来很⼤的挑战,是控制⽅法实现的典型平台,得到该领域专家的极⼤重视,成为具有挑战性的控制领域的课题之⼀。
两轮平衡车是⼀个复杂系统的实验装置,其控制算法复杂、参数变化⼤,是理论研究、实验仿真的理想平台。
在平衡车系统中进⾏解賴控制、不确定系统控制、⾃适应控制、⾮线性系统控制等控制⽅法的研究,具有物理意义明显、⽅便观察的特点,并且平衡车从造价来说不是很贵,占地⾯积⼩,是很好的实验⼯具,另外建⽴在此基础上的平衡系统的研究,能够适应复杂环境的导航、巡视等,在⼯业⽣产和社会⽣中具有⾮常⼤的应⽤潜⼒。
两轮平衡车所使⽤的控制⽅法主要有:状态回馈控制、PID控制、最优控制、极点回馈控制等,这些控制⽅法被称为传统控制⽅法。
1.2 本⽂研究内容(1)两轮⾃平衡⼩车的简单控制系统设计。
(2)基于倒⽴摆模型的两轮⾃平衡⼩车的数学建模。
(3)利⽤MATLAB⼯具进⾏两轮⾃平衡⼩车的系统控制⽅法分析。
两轮自平衡小车毕业设计
两轮自平衡小车毕业设计毕业设计题目:两轮自平衡小车设计一、毕业设计背景与意义目前,智能机器人技术已经在各个领域得到广泛的应用,其中自平衡小车是一种非常具有代表性的机器人。
自平衡小车能够通过自身的控制系统来保持平衡姿态,并能够实现各种转向和动作。
因此,自平衡小车不仅能够广泛应用于工业生产中,还可以成为搬运、巡逻和助力等领域的优秀协助工具。
本毕业设计的目标是设计和实现一种能够自动控制、实现平衡的两轮自平衡小车。
通过这个设计,进一步探究并研究自平衡技术的原理及应用,增加对机器人控制系统和传感器的理解,提高对计算机控制和嵌入式系统的应用能力。
二、毕业设计的主要内容和任务1.研究和调研a)研究两轮自平衡小车的构造和原理;b)调研目前市场上相关产品,并分析其特点和存在的问题。
2.模块设计a)根据研究结果,设计自平衡小车的主要模块,包括平衡控制模块、动作控制模块和传感器模块;b)设计相关控制算法和策略,使小车能够保持平衡并能够实现转向和动作。
3.硬件搭建和调试a)根据模块设计的结果,搭建小车的硬件系统,包括选择适用的电机、陀螺仪、加速度计等;b)进行相应的调试和优化,保证小车的平衡和动作控制能力。
4.软件开发和系统集成a)开发小车的控制系统软件,包括实时控制系统和传感器数据处理等;b)将硬件系统和软件系统进行有机地集成,实现小车的平衡和动作控制。
5.实验和测试a)进行实验测试,验证设计的有效性和稳定性;b)进行相关的性能测试和比较研究。
三、设计预期成果1.自平衡小车的系统设计和实现,能够平衡姿态并能够实现转向和动作控制;2.控制系统软件的开发和优化,实现小车的实时控制和数据处理;3.相关模块和算法的设计和实现,如平衡控制模块和动作控制模块;4.实验和测试结果的总结和分析;5.毕业设计报告的撰写。
四、设计周期和工作安排1.阶段1:研究和调研阶段(1周)2.阶段2:模块设计阶段(2周)3.阶段3:硬件搭建和调试阶段(2周)4.阶段4:软件开发和系统集成阶段(2周)5.阶段5:实验和测试阶段(1周)6.阶段6:总结和报告撰写阶段(2周)五、预期解决的关键问题和技术难点1.小车平衡控制算法的设计和优化;2.小车动作控制算法的设计和优化;3.小车硬件系统与软件系统的有效集成;4.多个传感器数据的处理和融合。
基于单片机的两轮自动平衡小车设计

上
6 11 enableA
enableA
vVcCcC6I l 4. V Vs s s
D D8 D。 Dl{1
VCC 6
T
o UT C 0 U TC 0 U TB 0 U T
.......LI
in4007
上
L298N
VC C6
'
D2 D3 D |D
参 考 文
P13 一
5K
P23
D6
5 IN 1 0 U T1 2
P22
7 IN 2 0 U T2 3
P21
10 1N 3 o U T3 13
P20 只2
代
l
J
12 IN 4 o U T4 14
1 senseA
应用技一
是将 控制 直立 和方 向 的控制 信号 叠加 在一起 加 载 电 机上 .只要 电机处 于线 性状 态就 可 以同 时完成 上面 两个 任务 。速 度是 通过 调节 车模倾 角 来完 成 的 ,不 同的倾角 会 引起小 车 的加减 速 。从 而达 到对 于速度 的控制。两轮 自平衡小车的系统方程式如下 :
图 3 陀 螺 仪 电 路接 口图
3.2 加速度传感器 电路设计 MMA736 1是三 轴小 量程 的加速 传感 器 ,用 于检
测 物件 运 动 和方 向 .它 根 据 物件 运 动 和方 向改变 输 出信号 的电压值 。三轴 的信号在不运动或不被重力 作用的状态下 ,其输 出电压为 1.65 V。如果 沿着某 一 个方 向活 动 ,或 者受 到 重力 作 用 ,输 出 电压就 会 根 据其 运 动方 向 以及 设 定 的传 感 器 灵敏 度 而 输 出相 应的电压值 。采用单片机的片内 A/D转换器就可 以 检 测其 运 动 方 向 。但 是 小 车 运动 所 产 生 的加 速度 会 产生很大的干扰信号叠加在上述测量信号上 ,使得 输 出信号无法准确反映车模的倾角 ,因此 ,采用加 角速度传感 器和陀螺可使小车的直立控制取得 良好 的效果 (见 第 92页 图 4)。 3.3 电机驱 动 电路 的设计
两轮自平衡小车设计报告

两轮自平衡小车设计报告设计报告:两轮自平衡小车一、引言二、设计理念本设计希望实现一个简洁、稳定和高效的两轮自平衡小车。
考虑到小车需要快速响应外界环境变化,并迅速做出平衡调整,因此采用了传感器、控制器和执行机构相结合的设计思路。
通过传感器获取小车倾斜角度和加速度等数据,通过控制器对采集的数据进行处理和判断,并通过执行机构实时调整车身的倾斜角度,以实现平衡行走。
三、原理四、硬件结构1.车身结构:车身由两个电机、一个控制器、一个电池和一个平衡摆杆组成。
2.电机:采用直流无刷电机,具有较高的转速和输出功率。
3.控制器:采用单片机控制模块,能够对传感器数据进行处理和判断,并输出控制信号给电机。
4.传感器:主要包括陀螺仪、加速度计和倾斜传感器,用于感知小车的倾斜角度和加速度等数据。
5.电池:提供小车的电力供应,保证小车正常运行。
五、软件控制小车的软件控制主要包括数据处理和判断、控制信号生成和输出三个方面。
1.数据处理和判断:通过获取的传感器数据,包括倾斜角度和加速度等信息,根据预设的控制算法进行数据处理和判断。
2.控制信号生成:根据处理和判断得出的结果,生成相应的控制信号。
控制信号包括电机的转动方向和速度。
3.控制信号输出:将生成的控制信号输出给电机,实现倒立摆的平衡。
六、小车性能测试为了验证小车的设计和功能是否符合预期,进行了多项性能测试。
1.平衡行走测试:将小车放在平坦的地面上,通过传感器检测到小车的当前倾斜角度并进行调整,实现小车的自平衡行走。
2.转向测试:在平衡行走的基础上,通过控制信号调整两个电机的速度差,从而实现小车的转向。
3.避障测试:在平衡行走和转向的基础上,添加超声波传感器等避障装置,实现小车的避障功能。
七、总结通过本设计报告的详细介绍,我们可以看出两轮自平衡小车具备平衡行走、转向和避障等功能,为用户提供了一个稳定、高效的移动平台。
未来,我们将进一步优化小车的设计和控制算法,提高小车的性能和应用范围。
两轮自平衡小车设计

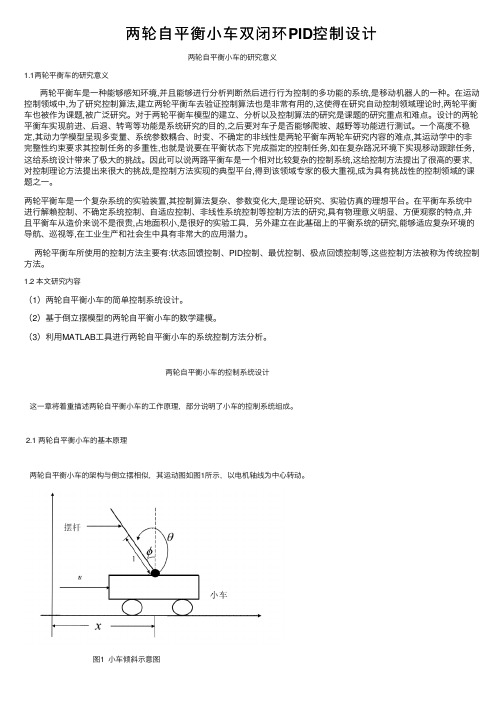
两轮自平衡小车设计一、任务要求图1两轮自平衡车两轮自平衡车结构原理如图1所示,主控制器(DSP)通过采集陀螺仪和加速度传感器得到位置信号,通过控制电机的正反转实现保持小车站立。
1、通过控制两个电机正反运动,实现小车在原地站立。
2、实现小车的前进、后退、转弯、原地旋转、停止等运动;二、方案实现2.1电机选型图2直流电机两轮自平衡车由于需要时刻保持平衡,对于倾角信号做出快速响应,因此对电机转矩要求较大。
在此设计中选用国领电机生产的直流电机,其产品型号为GB37Y3530,工作电压6v-12v。
为增大转矩,电机配有1:30传动比的减速器。
2.2电机测速方案图3霍尔测速传感器在电机测速方案上主流的方案有两种,分别是光电编码器和霍尔传感器。
光电编码器测量精度由码盘刻度决定,刻度越多精度越高;霍尔传感器精度由永磁体磁极数目决定,同样是磁极对数越高精度越高。
由于两轮自平衡车工作于剧烈震动环境中,光电编码器不适应这种环境,因此选用霍尔传感器来测量速度。
电机尾部加装双通道霍尔效应编码器,AB双路输出,单路每圈脉冲16CPR,双路上下沿共输出64CPR,配合1:30的减速器传动比,可以计算出车轮转动一圈输出的脉冲数目为64X30=1920CPR,完全符合测速要求。
2.3电机驱动控制系统概述本平台电机驱动采用全桥驱动芯片L298N,内部包含4通道逻辑驱动电路,两个H-Bridge的高电压、大电流双全桥式驱动器。
本驱动桥能驱动46V、2A 以下的电机。
其输出可以同时控制两个电机的正反转,非常适合两轮自平衡车开发,其原理图如下图所示图4L298N原理图采用脉宽调制方式(即PWM,Pulse Width Modulation)来调整电机的转速和转向。
脉宽调制是通过改变发出的脉冲宽度来调节输入到电机的平均电压,即通过不同方波的平均电压不同来改变电机转速。
图5PWM脉宽调节示意2.4倾角位置采集倾角和角速度采集是两轮自平衡车控制的重点,选用MPU6050模块作为其采集模块。
基于PID控制器的两轮自平衡小车设计

基于PID控制器的两轮自平衡小车设计一、引言在自动控制领域中,PID控制器是一种常用的控制器。
它通过对系统输出进行反馈,来调节系统的输入,使系统的输出尽可能接近预期值。
本文将基于PID控制器设计一个两轮自平衡小车。
二、系统模型两轮自平衡小车是由两个驱动电机控制的,通过控制电机的转速来实现小车的前进、后退、转向等功能。
小车的整体结构是一个倒立摆,通过控制电机的转速,使其保持垂直状态。
系统的输入是电机转速,输出是小车的倾斜角度。
三、PID控制器PID控制器由比例(P)、积分(I)和微分(D)三个部分组成。
这三个部分根据误差来计算控制信号,实现对系统的控制。
1.比例控制部分:比例控制器根据误差的大小来计算控制信号。
误差是指系统输出与期望输出之间的差异。
比例控制器的计算公式为u_p=K_p*e(t),其中u_p是比例输出,K_p是比例增益,e(t)是误差。
2. 积分控制部分:积分控制器根据误差的累积值来计算控制信号。
积分控制器的计算公式为u_i = K_i * ∫e(t)dt,其中u_i是积分输出,K_i是积分增益,∫e(t)dt是误差的累积值。
3. 微分控制部分:微分控制器根据误差的变化率来计算控制信号。
微分控制器的计算公式为u_d = K_d * de(t)/dt,其中u_d是微分输出,K_d是微分增益,de(t)/dt是误差的变化率。
PID控制器的输出信号为u(t)=u_p+u_i+u_d,其中u(t)是控制信号。
四、设计与实现在设计两轮自平衡小车的PID控制器时,需要根据系统的特性来选择合适的参数。
通常可以通过试验或仿真来获得系统的模型,进而进行参数调节。
1.参数调节:首先,可以将系统的转角作为输入信号,通过试验或仿真来获得小车的倾斜角度与转角的关系。
然后,可以根据比例、积分和微分控制部分的特性,来选择合适的增益参数。
比例增益越大,系统的响应速度越快,但可能会引起震荡;积分增益可以消除静态误差,但可能会引起过冲;微分增益可以减小震荡,但可能会引起超调。
两轮自平衡小车毕业设计讲解
本科毕业设计(论文)题目两轮自平衡小车的设计学院电气与自动化工程学院年级专业班级学号学生姓名指导教师职称论文提交日期两轮自平衡小车的设计摘要近年来,两轮自平衡车的研究与应用获得了迅猛发展。
本文提出了一种两轮自平衡小车的设计方案,采用陀螺仪ENC-03以及MEMS加速度传感器MMA7260构成小车姿态检测装置,使用卡尔曼滤波完成陀螺仪数据与加速度计数据的数据融合。
系统选用飞思卡尔16位单片机MC9S12XS128为控制核心,完成了传感器信号的处理,滤波算法的实现及车身控制,人机交互等。
整个系统制作完成后,各个模块能够正常并协调工作,小车可以在无人干预条件下实现自主平衡。
同时在引入适量干扰情况下小车能够自主调整并迅速恢复稳定状态。
小车还可以实现前进,后退,左右转等基本动作。
关键词:两轮自平衡陀螺仪姿态检测卡尔曼滤波数据融合IDesign of Two-Wheel Self-Balance VehicleAbstractIn recent years, the research and application of two-wheel self-balanced vehicle have obtained rapid development. This paper presents a design scheme of two-wheel self-balanced vehicle. Gyroscope ENC-03 and MEMS accelerometer MMA7260 constitute vehicle posture detection device. System adopts Kalman filter to complete the gyroscope data and accelerometer data fusion.,and adopts freescale16-bit microcontroller-MC9S12XS128 as controller core. The center controller realizes the sensor signal processing the sensor signal processing, filtering algorithm and body control, human-machine interaction and so on.Upon completion of the entire system, each module can be normal and to coordinate work. The vehicle can keep balancing in unmanned condition. At the same time, the vehicle can be adjusted independently then quickly restore stability when there is a moderate amount of interference. In addition, the vehicle also can achieve forward, backward, left and right turn and other basic movements.Key Words: Two-Wheel Self-Balance; Gyroscope; Gesture detection; Kalman filter; Data fusionII目录1.绪论 (1)1.1研究背景与意义 (1)1.2两轮自平衡车的关键技术 (2)1.2.1系统设计 (2)1.2.2数学建模 (2)1.2.3姿态检测系统 (2)1.2.4控制算法 (3)1.3本文主要研究目标与内容 (3)1.4论文章节安排 (3)2.系统原理分析 (5)2.1控制系统要求分析 (5)2.2平衡控制原理分析 (5)2.3自平衡小车数学模型 (6)2.3.1两轮自平衡小车受力分析 (6)2.3.2自平衡小车运动微分方程 (9)2.4 PID控制器设计 (10)2.4.1 PID控制器原理 (10)2.4.2 PID控制器设计 (11)2.5姿态检测系统 (12)2.5.1陀螺仪 (12)2.5.2加速度计 (13)2.5.3基于卡尔曼滤波的数据融合 (14)2.6本章小结 (16)3.系统硬件电路设计 (17)3.1 MC9SXS128单片机介绍 (17)3.2单片机最小系统设计 (19)3.3 电源管理模块设计 (21)3.4倾角传感器信号调理电路 (22)III3.4.1加速度计电路设计 (22)3.4.2陀螺仪放大电路设计 (22)3.5电机驱动电路设计 (23)3.5.1驱动芯片介绍 (24)3.5.2 驱动电路设计 (24)3.6速度检测模块设计 (25)3.6.1编码器介绍 (25)3.6.2 编码器电路设计 (26)3.7辅助调试电路 (27)3.8本章小结 (27)4.系统软件设计 (28)4.1软件系统总体结构 (28)4.2单片机初始化软件设计 (28)4.2.1锁相环初始化 (28)4.2.2模数转换模块(ATD)初始化 (29)4.2.3串行通信模块(SCI)初始化设置 (30)4.2.4测速模块初始化 (31)4.2.5 PWM模块初始化 (32)4.3姿态检测系统软件设计 (32)4.3.1陀螺仪与加速度计输出值转换 (32)4.3.2卡尔曼滤波器的软件实现 (34)4.4平衡PID控制软件实现 (36)4.5两轮自平衡车的运动控制 (37)4.6本章小结 (39)5. 系统调试 (40)5.1系统调试工具 (40)5.2系统硬件电路调试 (40)5.3姿态检测系统调试 (41)5.4控制系统PID参数整定 (43)5.5两轮自平衡小车动态调试 (44)IV5.6本章小结 (45)6. 总结与展望 (46)6.1 总结 (46)6.2 展望 (46)参考文献 (47)附录 (48)附录一系统电路原理图 (48)附录二系统核心源代码 (49)致谢 (52)V常熟理工学院毕业设计(论文)1.绪论1.1研究背景与意义近年来,随着电子技术的发展与进步,移动机器人的研究不断深入,成为目前科学研究最活跃的领域之一,移动机器人的应用范围越来越广泛,面临的环境和任务也越来越复杂,这就要求移动机器人必须能够适应一些复杂的环境和任务。
两轮自平衡小车的设计与实现
两轮自平衡小车的设计与实现一、本文概述随着科技的飞速发展,智能化、自主化已经成为现代机器人技术的重要发展方向。
两轮自平衡小车作为一种典型的动态稳定控制机器人,其设计与实现技术对于推动机器人技术的进步具有重要意义。
本文旨在深入探讨两轮自平衡小车的设计理念、实现方法以及关键技术,为相关领域的研究者和爱好者提供有益的参考。
本文将首先介绍两轮自平衡小车的基本概念和原理,阐述其动态稳定控制的基本思想。
随后,将详细介绍两轮自平衡小车的硬件设计,包括电机驱动、传感器选型、控制器设计等关键部分,并阐述各部件之间的协同工作原理。
在此基础上,本文将重点探讨两轮自平衡小车的软件实现,包括平衡控制算法、运动控制算法以及人机交互界面设计等。
本文还将对两轮自平衡小车的性能优化和实际应用进行深入分析,探讨如何提高其稳定性、响应速度以及续航能力等问题。
本文将对两轮自平衡小车的发展趋势和前景进行展望,为相关领域的研究和发展提供有益的参考。
通过本文的阐述,读者可以全面了解两轮自平衡小车的设计与实现过程,掌握其关键技术和应用方法,为推动机器人技术的发展做出贡献。
二、两轮自平衡小车的基本原理两轮自平衡小车,又称作双轮自稳车或双轮倒立摆,是一种基于动态稳定技术设计的个人交通工具。
其基本原理主要涉及到力学、控制理论以及传感器技术。
两轮自平衡小车的稳定性主要依赖于其独特的力学结构。
与传统三轮或四轮的设计不同,双轮自平衡小车只有两个支撑点,这意味着它必须通过动态调整自身姿态来维持稳定。
这种动态调整的过程类似于杂技演员走钢丝,需要精确的平衡和快速的反应。
实现自平衡的关键在于控制理论的应用。
两轮自平衡小车通常搭载有先进的控制系统,该系统通过传感器实时监测小车的姿态(如倾斜角度、加速度等),并根据这些信息计算出必要的调整量。
控制系统随后会向电机发送指令,调整小车的运动状态,以保持平衡。
传感器在两轮自平衡小车中扮演着至关重要的角色。
常见的传感器包括陀螺仪、加速度计和角度传感器等。
毕业设计(论文)-两轮自平衡小车的设计
本科毕业设计(论文)题目两轮自平衡小车的设计学院电气与自动化工程学院年级专业班级学号学生姓名指导教师职称论文提交日期两轮自平衡小车的设计摘要近年来,两轮自平衡车的研究与应用获得了迅猛发展。
本文提出了一种两轮自平衡小车的设计方案,采用陀螺仪ENC-03以及MEMS加速度传感器MMA7260构成小车姿态检测装置,使用卡尔曼滤波完成陀螺仪数据与加速度计数据的数据融合。
系统选用飞思卡尔16位单片机MC9S12XS128为控制核心,完成了传感器信号的处理,滤波算法的实现及车身控制,人机交互等。
整个系统制作完成后,各个模块能够正常并协调工作,小车可以在无人干预条件下实现自主平衡。
同时在引入适量干扰情况下小车能够自主调整并迅速恢复稳定状态。
小车还可以实现前进,后退,左右转等基本动作。
关键词:两轮自平衡陀螺仪姿态检测卡尔曼滤波数据融合IDesign of Two-Wheel Self-Balance VehicleAbstractIn recent years, the research and application of two-wheel self-balanced vehicle have obtained rapid development. This paper presents a design scheme of two-wheel self-balanced vehicle. Gyroscope ENC-03 and MEMS accelerometer MMA7260 constitute vehicle posture detection device. System adopts Kalman filter to complete the gyroscope data and accelerometer data fusion.,and adopts freescale16-bit microcontroller-MC9S12XS128 as controller core. The center controller realizes the sensor signal processing the sensor signal processing, filtering algorithm and body control, human-machine interaction and so on.Upon completion of the entire system, each module can be normal and to coordinate work. The vehicle can keep balancing in unmanned condition. At the same time, the vehicle can be adjusted independently then quickly restore stability when there is a moderate amount of interference. In addition, the vehicle also can achieve forward, backward, left and right turn and other basic movements.Key Words: Two-Wheel Self-Balance; Gyroscope; Gesture detection; Kalman filter; Data fusionII目录1.绪论 (1)1.1研究背景与意义 (1)1.2两轮自平衡车的关键技术 (2)1.2.1系统设计 (2)1.2.2数学建模 (2)1.2.3姿态检测系统 (2)1.2.4控制算法 (3)1.3本文主要研究目标与内容 (3)1.4论文章节安排 (3)2.系统原理分析 (5)2.1控制系统要求分析 (5)2.2平衡控制原理分析 (5)2.3自平衡小车数学模型 (6)2.3.1两轮自平衡小车受力分析 (6)2.3.2自平衡小车运动微分方程 (9)2.4 PID控制器设计 (10)2.4.1 PID控制器原理 (10)2.4.2 PID控制器设计 (11)2.5姿态检测系统 (12)2.5.1陀螺仪 (12)2.5.2加速度计 (13)2.5.3基于卡尔曼滤波的数据融合 (14)2.6本章小结 (16)3.系统硬件电路设计 (17)3.1 MC9SXS128单片机介绍 (17)3.2单片机最小系统设计 (19)3.3 电源管理模块设计 (21)3.4倾角传感器信号调理电路 (22)III3.4.1加速度计电路设计 (22)3.4.2陀螺仪放大电路设计 (22)3.5电机驱动电路设计 (23)3.5.1驱动芯片介绍 (24)3.5.2 驱动电路设计 (24)3.6速度检测模块设计 (25)3.6.1编码器介绍 (25)3.6.2 编码器电路设计 (26)3.7辅助调试电路 (27)3.8本章小结 (27)4.系统软件设计 (28)4.1软件系统总体结构 (28)4.2单片机初始化软件设计 (28)4.2.1锁相环初始化 (28)4.2.2模数转换模块(ATD)初始化 (29)4.2.3串行通信模块(SCI)初始化设置 (30)4.2.4测速模块初始化 (31)4.2.5 PWM模块初始化 (32)4.3姿态检测系统软件设计 (32)4.3.1陀螺仪与加速度计输出值转换 (32)4.3.2卡尔曼滤波器的软件实现 (34)4.4平衡PID控制软件实现 (36)4.5两轮自平衡车的运动控制 (37)4.6本章小结 (39)5. 系统调试 (40)5.1系统调试工具 (40)5.2系统硬件电路调试 (40)5.3姿态检测系统调试 (41)5.4控制系统PID参数整定 (43)5.5两轮自平衡小车动态调试 (44)IV5.6本章小结 (45)6. 总结与展望 (46)6.1 总结 (46)6.2 展望 (46)参考文献 (47)附录 (48)附录一系统电路原理图 (48)附录二系统核心源代码 (49)致谢 (52)V常熟理工学院毕业设计(论文)1.绪论1.1研究背景与意义近年来,随着电子技术的发展与进步,移动机器人的研究不断深入,成为目前科学研究最活跃的领域之一,移动机器人的应用范围越来越广泛,面临的环境和任务也越来越复杂,这就要求移动机器人必须能够适应一些复杂的环境和任务。
基于.PID控制器的两轮自平衡小车设计说明书
本科毕业设计基于PID控制器的两轮自平衡小车设计摘要两轮自平衡小车具有体积小、结构简单、运动灵活的特点.适用于狭小和危险的工作空间.在安防和军事上有广泛的应用前景。
两轮自平衡小车是一种两轮左右平衡布置的.像传统倒立摆一样.本身是一种自然不稳定体.其动力学方程具有多变量、非线性、强耦合、时变、参数不确定性等特性.需要施加强有力的控制手段才能使其保持平衡。
本文在总结和归纳国内外对两轮自平衡小车的研究现状.提出了自己的两轮自平衡小车软硬件设计方案.小车硬件采用陀螺仪和加速度传感器检测车身的重力方向的倾斜角度和车身轮轴方向上的旋转加速度.数据通过控制器处理后.控制电机调整小车状态.使小车保持平衡。
由于陀螺仪存在温漂和积分误差.加速度传感器动态响应较慢.不能有效可靠的反应车身的状态.所以软件使用互补滤波算法将陀螺仪和加速度传感器数据融合.结合陀螺仪的快速的动态响应特性和加速度传感器的长时间稳定特性.得到一个优化的角度近似值。
文中最后通过实验验证了自平衡小车软硬件控制方案的可行性。
关键词:自平衡互补滤波数据融合倒立摆Two-wheeled Self-balancing RobotMa Xuedong<College of Engineering, South China Agricultural University, Guangzhou 510642,China>Abstract:The two-wheeled self-balancing robot is small in mechanism, with simple structure and can make flexible motion, suitable for narrow and dangerous work space. So it has wide range of applications in security and military. The two-wheeled self-balancing robot is a natural unstable system. The device of this system is a parallel arrangement of two single wheels, like a traditionalinverted pendulum. Its dynamics are multi-variable, non-linear, serious coupling and uncertain parameters etc. It must be exerted strong control to make it stable.In this paper, studies on two-wheel self-balancing vehicle at home and abroad are summarized. We designed the hardware and software of our two-wheel self-balancing vehicle. The car using rotational accelerometers, gyroscopes and acceleration sensors to detect body condition and the state in which the pitch change rate. The central processing unit calculate the appropriate data and instructions, and control the motor to achieve the body balancing. Because of gyro drift problems and Integral error with accelerometers and slow dynamic response of acceleration sensors. It can’t provide effective or reliable information to reflect the real state of its body. So we using complementary filter to fuse the data of two sensors, so that the inclination of its body can be approximated better.Finally, we verified the feasibility of the system’s hardware and software through experiment.Key Words: Self-Balancing complementary filter Data Fusion Inverted Pendui目录1 前言11.1 研究意义11.2 国内外研究现状11.2.1 国外研究成果11.2.2 国内研究成果11.3 本文的研究内容22 两轮平衡车的平衡原理22.1 平衡车的机械结构22.2 两轮车倾倒原因的受力分析22.3 平衡的方法33 系统方案分析与选择论证33.1 系统方案设计33.1.1 主控芯片方案33.1.2 姿态检测传感器方案33.1.3 电机选择方案43.2 系统最终方案54 主要芯片介绍和系统模块硬件设计54.1 加速度传感器ADXL34554.2 陀螺仪传感器L3G4200D64.3 主控电路74.4 电机驱动电路84.5 供电电路85 系统软件设计85.1 系统初始化95.2 滤波器95.2.1 低通滤波器105.2.2 互补滤波器105.3 PID控制器125.3.1 PID概述125.3.2 数字PID算法125.3.3 PID控制器设计136 硬件电路146.1 硬件制作与调试146.2 硬件调试结果146.2.1 姿态感知系统测试结果146.2.2 PID控制器测试结果157 结论15参考文献17附录18致谢18华南农业大学本科生毕业设计成绩评定表1 前言1.1 研究意义应用意义。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2015年陇东学院第十六届“挑战杯”
课外学术科技作品竞赛
双轮自平衡小车的设计与制作
学院:电气工程学院
班级:12级自动化本科班
姓名:周永
2015年12月8日
双轮自平衡小车的设计与制作
摘要:双轮自平衡小车是一个集动态决策和规划、环境感知、行为控制和执行等多种功能于一体的综合复杂系统,其关键是在解决自平衡的同时,还能够适应在各种环境下的控制任务。
通过运用外加速度传感器、角速度传感器等,可以实现小车的平衡自主前进。
双轮自平衡小车,涉及到传感器的驱动,数据的处理,角度的计算,电机的控制等,内容比较丰富,可作为实践自动控制原理及单片机技术的一个不错选择,是自我锻炼的绝好选题,对于以后制作此方面的民用产品也有很大的启迪作用。
关键词:双轮;自平衡;控制;传感器
1.引言
目前市场上的各种电子产品及家电机器人等行业越来越多地用到了智能控制技术。
可以说,当今社会是一个智能型社会。
各方各面都在竭尽全力向着智能方向发展,不论是人工智能还是联网智能,都在突出一个智能。
智能已经覆盖了我们生活的方方面面,我们正在被智能的概念所潜移默化。
不论是智能手机、玩具还是机器人,都已经成了我们生活的一部分。
正是在这种情况下,智能交通的发展也发生了翻天覆地的变化,从飞车到自动驾驶汽车,无不在向我们说明,现代人已经对智能型交通工具期待已久了。
作为最新科技产品的一个代表,最近市场上新出现的独轮车越来越受到了消费者的青睐。
可以想象,最近几年内此类产品将会在市场上争得一席之地。
比起独轮车,两轮车具有同样的购买热度,但是设计难度却没那么高,所以我将选择了从双轮车开始玩起智能交通工具。
2设计方案
方案一:用51单片机作为主控制器,用MPU6050模块采集姿态数据,用光电编码器对5V直流电机进行编码,显示模块采用LCD12864液晶屏,电源采用三端稳压方案,用红外遥控控制小车行走。
本设计简单廉价,然而由于主控的反应相对缓慢,很难满足设计要求。
方案二:采用STM32单片机作主控制器,仍然用MPU6050模块作姿态数据采集,而电机采用二手的型号为16G214E MR19的具有高精度霍尔编码器的原价2000+的瑞士进口12V直流电机,显示模块采用了更轻薄更清晰更小巧的
OLED 屏,电源采用12V 航模电池,遥控系统选用低功耗的蓝牙,方便实用。
此方案高效可靠,价格也不是特别高,很适合这样的实践项目。
综上分析,总体方案设计采用方案二。
3系统硬件设计
3.1系统总体框图
系统的总体设计方案主要由蓝牙遥控模块、STM32最小系统模块、MPU6050姿态采集模块、OLED 显示模块、蔽障模块、编码电机模块,电源模块七部分构成,如图1所示。
图1系统总体框图3.2电源电路设计
在电源这一块,主要由可充电的12V 航模锂电池来供电。
通过可防止插反的T 型接头经大电流开关接入电源电路。
首先,从大电流开关过来的电流设置了一个电压检测电路,主要是以分压的形式完成的,其目的是实时检测电池电压并显示在OLED 屏上,当电压低于某个值时提示人去充电,而不至于过度放电导致损坏电池。
然后,经LM2596T-5V 降压后稳压在5V,这个转换出来的电压主要用于传统传感器及电机驱动。
最后,在5V 的基础上又经AMS1117三端稳压为3.3V,这个3.3V 主要是给低功耗元器件供电的,比如说STM32、蓝牙、无线、电机编码器、OLED 与CCD 等。
为了防止意外短路,特意在3.3V 电路中加入了500mA 6V 的保险,即保证了低功耗元器件的安全。
如图2所示。
手机蓝牙遥控
电源模块
STM32最小系统
MPU6050姿态采集模块编码电机模块蔽障模块
OLED 显示模块
图2电源电路
3.3系统控制设计
系统控制电路由单片机最小系统STM32F103C8T6、MPU6050电路、电机编码器接口电路、电机驱动电路、传感器接口电路、OLED显示电路等六部分组成,下面将对它们分别进行介绍。
图3单片机最小系统
单片机最小系统STM32F103C8T6:STM32F103C8T6是32位集成嵌入式微控制器,速度达72MHz;拥有37个输入/输出、10个12位A/D转换器、20KB RAM 及64KB Flash;低功耗2.0V-3.6V供电电压;还具有更多的外围设备:DMA,电机控制PWM,PWM,温度传感器等;它是一个很具性价比的中端配置的主控,今年来越来越受到广大单片机爱好者的追捧,在本设计中主要负责姿态解算及相关控制。
外围电路如图3所示。
图4MPU6050电路
MPU6050电路:MPU6050为全球首例整合性6轴运动处理组件,相较于多组件方案,免除了组合陀螺仪与加速器时之轴间差的问题,减少了大量的包装空间。
它整合了3轴陀螺仪、3轴加速器,并含可藉由第二个I2C端口连接其他厂牌之加速器、磁力传感器、或其他传感器的数位运动处理DMP硬件加速引擎,由主要I2C端口以单一数据流的形式,向应用端输出完整的9轴融合演算技术。
将它运用在本设计系统中主要是需要通过它来获取小车的姿态数据,进而让主控姿态解算后将控制信号传送给电机驱动电路控制电机发出相应动作,外围电路如图4所示。
图5电机编码器接口电路
电机编码器接口电路:电机编码器是安装在电机上用来测量磁极位置和电机转角及转速的一种传感器,从物理介质的不同来分,电机编码器可以分为光电编码器和磁电编码器。
本设计中所采用的编码器嵌入在电机内部,是精度超高的一种,具体电路如图5所示。
图6电机驱动电路
电机驱动电路:本设计中使用的TB6612FNG是东芝半导体公司生产的一款直流电机驱动器件,它具有大电流MOSFET-H桥结构,双通道电路输出,可同时驱动2个直流电机,它具有很高的集成度,同时能提供足够的输出能力,运行
性能和能耗方面也具有优势,因此在集成化、小型化的电机控制系统中,它可以作为理想的电机驱动器件,外围电路如图6所示。
图7传感器接口电路
传感器接口电路:本设计预设了两种传感器接口,即CCD接口及超声波接口,它们都是用来蔽障的,可根据实际情况任选一种即可,电路连接如图7所示。
图8OLED显示电路
OLED显示电路:OLED显示技术与传统的LCD显示方式不同,无需背光灯,具有自发光的特性,采用非常薄的有机材料涂层和玻璃基板,当有电流通过时,这些有机材料就会发光。
而且OLED显示屏幕可以做得更轻更薄,可视角度更大,并且能够显著节省电能,本设计的具体电路连接如图8所示。
3.4无线遥控器设计
本设计中预设了无线模块接口及蓝牙接口,均可用来接收不同的遥控信号来控制小车,其连接电路图分别如图9、图10所示。
图9无线模块接口
图10蓝牙电路
4.系统测试与误差分析
4.1测试
测试工具:Android手机,MiniBalance V3.5。
测试环境:新食堂外广场及其斜坡人行道。
经过连接蓝牙APP遥控测试表明,该双轮自平衡两轮车已经具备了基本的自平衡站立、行走和负载行走,以及自主蔽障和设置程序定形跑圈及绕8字等功能,CCD循迹待定。
4.2误差分析
在绕8字的途中会发现随着不断地循环,位置有些偏差,经多次测试证实,产生该问题的主要原因是二手电机内编码盘可能有些磨损导致误差,但误差较小,通过改善程序可以得到改善,通过总结得出,符合题目要求,因此可得此方案成立。
5结束语
随着科学技术的发展,交通工具的智能化、网络化势在必行。
对于一个控制精度高、可玩性强、价格合理的双轮自平衡车而言,这确实是一个不错的选择方向,未来类似的发展空间也将越来越大。
本文给出了一个高精度廉价易控双轮自平衡小车的解决方案,初步设计了能够用手机遥控控制,能够自主蔽障及可编程定形行走的双轮自平衡小车,它也可以被应用到将来的餐厅等场合做服务业机器人使用。
参考文献:
[1]刘火良,杨森.STM32库开发实战指南.机械工业出版社,2015年4月
[2]第七届全国大学生“飞思卡尔”杯智能汽车竞赛电磁组直立行车参考设计方案(版本2.0)
作品附图:。