上海电机学院机电综合实验F组
上海电机学院各部门联系方式
部门索引
党群部门 ................................................................................................................................... 1 党委办公室 ........................................................................................................................... 1 党委组织部、统战部 ........................................................................................................... 1 党委宣传部 ........................................................................................................................... 1 党委学工部(学生处) ....................................................................................................... 1 纪委办公室(监察处) ....................................................................................................... 2 工会 ....................................................................................................................................... 2 团委 ....................................................................................................................................... 2 机关党总支 ........................................................................................................................... 2 后勤党总支 ........................................................................................................................... 3 老干部党总支 ....................................................................................................................... 3
双闭环三相异步电机调压调速系统实验报告

“运动控制系统”专题实验r2 r2+Rs1 r2+Rs2 r2+Rs3sm sm1 sm2 s Tem图6-1整个调速系统采用了速度,电流两个反馈控制环。
这里的速度环作用基本上与直流调速系统相同而电流环的作用则有所不同。
在稳定运行情况下,电流环对电网振动仍有较大的抗扰作用,但在起动过程中电流环仅起限制最大电流的作用,不会出现最佳起动的恒流特性,也不可能是恒转矩起动。
异步电机调压调速系统结构简单,采用双闭环系统时静差率较小,且比较容易实现正,反转,反接和能耗制动。
但在恒转矩负载下不能长时间低速运行,因低速运行时转差功率全部消耗在转子电阻中,使转子过热。
2.双闭环异步电机调压调速系统的机械特性。
转子变电阻时的机械特性:3.三相异步电机的调速方法三种类型:转差功率消耗型:调压、变电阻等调速方式,转速越低,转差功率消耗越大。
转差功率馈送型:控制绕线转子异步电机的转子电压,利用转差功率可实现调节转速的目的。
如串级调速。
转差功率不变型:转差功率很小,而且不随转速变换,如改变磁极对数调速,变频调速。
1)定子调压调速当负载转矩一定时,随着电机定子电压的降低,主磁通减少,转子感应电势减少,转(2)空载电压为200V时n/(r/min) 1281 1223 1184 1107 1045I G/A 0.10 0.11 0.12 0.13 0.13U G/V 182 179 176 166 157 M/(N·m) 0.2265 0.2458 0.2636 0.2814 0.28312.闭环系统静特性n/(r/min) 1420 1415 1418 1415 1416 1412I G/A 0.11 0.14 0.16 0.19 0.21 0.26U G/V 203 200 201 200 200 199 M/(N·m) 0.2394 0.2795 0.3080 0.3777 0.3496 0.4482 静特性曲线:与开环机械特性比较,闭环静特性比开环机械特性硬得多,且随着电压降低,开环特性越来越软。
传感器与检测技术综合实验指导书
工业生产流水线自动化测控综合实验台传感器与检测技术综合实验实验指导书主编:梁森,王洋,计丽霞liangsen163@适用专业:电气技术及其自动化(请预习后再来实验)实验地点:技术中心 A 5062010-12-27,29传感器与自动检测技术(本科)综合实验指导书上海电机学院电气学院目录第一章流水线自动化测控综合实验台综述 (1)1.1 结构和功能综述 (1)1.2实验项目 (6)1.3实验台的配置 (7)1.4 技术参数 (8)第二章传感器与检测技术综合实验台的动作过程综述 (9)2.1 整机工作流程和步骤 (9)2.2 送料机构说明 (11)2.3 机械手搬运机构说明 (11)2.4 工件传送和分选知识 (12)2.5涉及到的其他气动元件知识 (13)第三章传感器与检测技术综合实验的目的、步骤及结果 (18)3.1 系统的初始化操作 (18)3.2 分选实验 (20)3.3 电容接近开关实验及性能测试 (26)3.4 电涡流位移传感器实验及线性化的研究 (28)3.5 应变传感器称重实验及非线性和温漂的研究 (32)第一章流水线自动化测控综合实验台综述1.1 结构和功能综述1.1.1YL237型工业流水线自动化测控综合实验台的特点本实验设备是中国亚龙科技有限公司生产的,名称为“工业流水线自动化测控综合实验台”,简称为“传感器与检测技术综合实验台”,配置了电脑和三菱PLC。
本实验指导书阐述了工业生产流水线自动化测控综合实验台的基本结构、工作原理、工作过程和操作步骤,给出了较详细的使用说明。
阅读和理解本实验指导书,也是机电一体化知识学习的一部分。
本实验台将多门理论课中学到的机械、电子、传感器、检测、PLC、电气控制等课程有关知识加以综合。
为了进行研究性实验,本实验系统还允许进行模块化拆分和组合,可以通过重新定义输入/输出口地址,重新对PLC进行编程,完成学生自己想要的动作和功能。
图1-1 流水线自动化测控综合实验台示意图图1-2 传感器与检测技术综合实验室1.1.2传感器与检测技术综合实验台总体实验目的①验证学过的几种常用传感器的原理;②对几种常用传感器的特性进行测试;③学习几种常用传感器的调试;④学习传感器在气动、流水线运行中的测控方法;⑤学习气动系统的组成;⑥学习如何组成综合测试系统等。
4《机电控制综合实践》任务书
《机电控制综合实践》任务书(内部资料)机电控制课程组编上海电机学院机械电子工程系2014.3三菱PLC+安川交流伺服电机+威纶触摸屏A组一、项目要求1、程序包括手动和自动模式;2、用触摸屏来运动控制平台的运动;3、通过触摸屏在线设置运动控制平台的X轴与Y轴的运动速度和位移值;4、触摸屏在线实时显示控制平台的X轴与Y轴的速度和位移值;5、伺服电机的主要常用参数设置,例如电子齿轮比、伺服电机的工作模式等;6、采用带“DOG点搜索”的回零方式;7、位置、速度反馈元件采用直线位移传感器;8、分别采用高速计数器和FX2N-4AD测量位移和速度;9、小组成员分别采用增量式、绝对式位置运动指令;10、X轴与Y轴自动运动循环过程自行设计;11、系统调试及分析。
二、项目考核在实践环节的考核中,我们还特别注重对学生进行实践能力的培养。
考核学生时并不只看操作结果,而是考核过程。
如他是否真正理解每次实验的目的,是否能独立思考、独立操作,是否有能力处理实验过程中出现的问题以及处理问题时是否能采用多种方法。
对分析问题、解决问题强,有创新成果的同学可适当加分,以资鼓励。
三、系统设计说明书要求1、系统设计方案论证,包括设计框图;2、综合实验平台的硬件分析,包括机械部分和电气部分装置机构说明;3、主要元器件的明细表;4、画出电路原理图;5、画出端子排安装与接线图;6、列出PLC I/O地址分配表、中间继电器分配表,编写PLC程序(包括注释);7、写出调试流程并按流程工作;8、完成全部实训文件,现场测试与答辩;9、实训的心得与建议;10、系统造价;11、参考资料三菱PLC+歩科步进电机+三菱触摸屏B组一、项目要求1、程序包括手动和自动模式;2、用触摸屏来运动控制平台的运动;3、通过触摸屏在线设置运动控制平台的X轴与Y轴的运动速度和位移值;4、触摸屏在线实时显示控制平台的X轴与Y轴的速度和位移值;5、步进电机的主要常用参数设置,例如歩距细分、驱动电流等;6、采用带“DOG点搜索”的回零方式;7、位置、速度反馈元件采用回转位移传感器;8、分别采用高速计数器和FX2N-4AD测量位移和速度;9、小组成员分别采用增量式、绝对式位置运动指令;10、X轴与Y轴自动运动循环过程自行设计;11、系统调试及分析。
直流电机电枢绕组分布排列和连接解析

Science and Technology &Innovation ┃科技与创新2019年第16期·57·文章编号:2095-6835(2019)16-0057-02直流电机电枢绕组分布排列和连接解析杜世勤(上海电机学院,上海201306)摘要:随着网络信息化的快速发展,在电气类专业本科教学课程中,越来越重视电子和信息方面课程的教学,以便于使学生毕业之后尽快适应工作环境,强电内容只得压缩。
直流电机在调速拖动等方面还在应用中,直流电机的现代控制理论是交流电机控制的基础,有些学有余力的学生,在课外对直流电机绕组有学习需求,因此,对直流电机电枢常用的叠绕组和波绕组的分布排列和连接进行了解析,用以对电机与拖动课程内容进行补充和提高。
关键词:直流电机;电枢绕组;叠绕组;波绕组中图分类号:TM33文献标识码:ADOI :10.15913/ki.kjycx.2019.16.0231引言随着网络信息化的快速发展,在电气类专业本科教学课程中,越来越重视电子和信息方面课程的教学,计算机方面的应用课程也在加大力度开发,以便于使学生毕业之后尽快适应工作环境。
同时,强电中的“电机学”和“拖动课程”往往被压缩成“电机与拖动”一门课,甚至包含实验内容也只有32课时,电机内部结构的教学简单化,考试内容较少涉及。
直流电机的使用在许多方面被交流电机取代,但直流电机在调速拖动等方面还在应用中。
直流电动机的现代控制理论中,电流环控制电枢转子的加速度、转速环控制电机的转速、位置环控制转子的具体位置是学习交流电机现代控制理论的基础。
电机是机电能量转换装置,磁场是其耦合场。
无论直流电机的耦合磁场是电励磁的还是永磁磁场,磁极的结构和励磁工作原理相比于电枢绕组而言,容易被学生理解和接受。
直流电机的电枢是直流电机机电能量转换的枢纽部件,包括电枢绕组、电枢冲片和换向器,电枢冲片是磁路的一部分,换向器是电路的一部分,只要学生到相关的电机生产企业实习过,则容易理解和掌握。
上海交大电机学实验+同步发电机运行特性

电机学实验报告实验四同步发电机运行特性一、实验目的1.掌握用实验方法测取三相同步发电机对称运行特性的方法;2.掌握用实验数据获取同步发电机稳态参数的方法。
二、实验内容1.测取发电机的空载特性;2.测取发电机的短路特性;3.测取额定电流条件下发电机的零功率因数负载特性。
三、实验接线图测取三相同步发电机对称运行特性的实验线路图如图4-1所示。
其中发电机G的转子与直流电动机M的转子机械连接,转子励磁绕组接励磁电源,电枢绕组为Y形连接。
图4-1 三相同步发电机运行特性接线图实验过程中,测定三相同步发电机空载特性的时候,将开关S2打开,这样同步发电机处于空载状态。
测定三相同步发电机短路特性的时候,将开关S2的右侧的三个端口短接,这样同步发电机处于短路运行状态。
测定额定电流条件下三相同步发电机零功率因数负载特性的时候,将开关S2闭合,X L 为一个三相饱和电抗器,忽略电阻,则它的功率因数为零,这样来测定零功率因数负载特性。
四、实验设备1.G同步发电机P N=2kW、U N=400V、I N=3.6A、n N=1500r/min;2.M直流电动机P N=2.2kW、U N=220V、I N=12.4A、U fN=220V、n N=1500r/min;3.变阻器R1:0/204Ω、0/17A,励磁变阻器R f1:0/500Ω、1A;4.X L三相饱和电抗器;5.直流电流表30A(电枢);6.直流电流表4A(励磁);7.直流电压表400V;8.交流电压表500V;9.交流电流表10A;10.功率表500V 10A。
五、实验数据1.测定发电机的空载特性:0AB AB CA2.测定发电机的短路特性:表4-2 发电机的短路特性实验数据n=nk A B C3.测定发电机的零功率因数负载特性:表4-3 发电机的零功率因数负载特性实验数据n=nAB AB CA六、特性曲线、参数计算及问题分析1.根据实验数据作出同步发电机的空载运行特性曲线U0=f(I f),如下图4-2所示:图4-2 发电机空载运行特性曲线2.根据实验数据作出同步发电机的短路运行特性曲线I k=f(I f),如下图4-3所示:图4-3 发电机短路运行特性曲线3.根据实验数据作出同步发电机的零功率因数负载特性曲线U=f(I f),如下图4-4所示图4-4 发电机零功率因数负载特性曲线4.利用空载特性和短路特性确定同步电机的直轴同步电抗X d(不饱和值)以及短路比:计算直轴同步电抗X d需要在取同一个I f值的情况下,计算空载电压U0和短路电流I k 的比值。
基于Ansoft Maxwell软件的异步电动机仿真教学实践
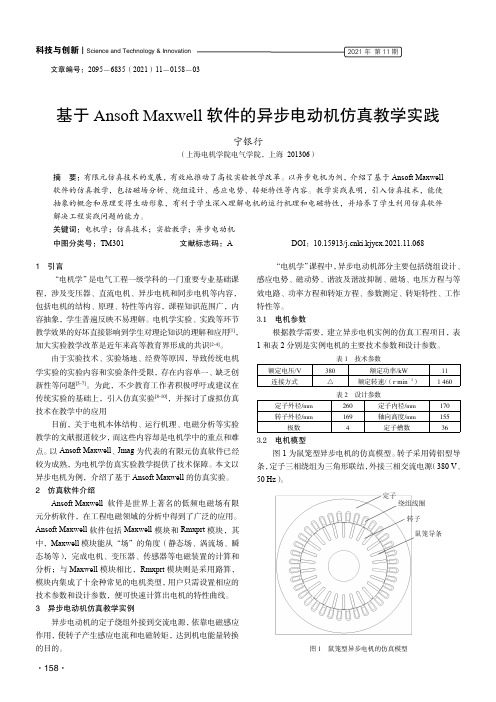
·158·文章编号:2095-6835(2021)11-0158-03基于Ansoft Maxwell 软件的异步电动机仿真教学实践宁银行(上海电机学院电气学院,上海201306)摘要:有限元仿真技术的发展,有效地推动了高校实验教学改革。
以异步电机为例,介绍了基于Ansoft Maxwell 软件的仿真教学,包括磁场分析、绕组设计、感应电势、转矩特性等内容。
教学实践表明,引入仿真技术,能使抽象的概念和原理变得生动形象,有利于学生深入理解电机的运行机理和电磁特性,并培养了学生利用仿真软件解决工程实践问题的能力。
关键词:电机学;仿真技术;实验教学;异步电动机中图分类号:TM301文献标志码:A DOI :10.15913/ki.kjycx.2021.11.0681引言“电机学”是电气工程一级学科的一门重要专业基础课程,涉及变压器、直流电机、异步电机和同步电机等内容,包括电机的结构、原理、特性等内容,课程知识范围广,内容抽象,学生普遍反映不易理解。
电机学实验、实践等环节教学效果的好坏直接影响到学生对理论知识的理解和应用[1],加大实验教学改革是近年来高等教育界形成的共识[2-4]。
由于实验技术、实验场地、经费等原因,导致传统电机学实验的实验内容和实验条件受限,存在内容单一、缺乏创新性等问题[5-7]。
为此,不少教育工作者积极呼吁或建议在传统实验的基础上,引入仿真实验[8-10],并探讨了虚拟仿真技术在教学中的应用目前,关于电机本体结构、运行机理、电磁分析等实验教学的文献报道较少,而这些内容却是电机学中的重点和难点。
以Ansoft Maxwell 、Jmag 为代表的有限元仿真软件已经较为成熟,为电机学仿真实验教学提供了技术保障。
本文以异步电机为例,介绍了基于Ansoft Maxwell 的仿真实验。
2仿真软件介绍Ansoft Maxwell 软件是世界上著名的低频电磁场有限元分析软件,在工程电磁领域的分析中得到了广泛的应用。
基于YOLOv5与迁移学习的目标检测和机械臂抓取位姿估计

2024年第48卷第3期Journal of Mechanical Transmission基于YOLOv5与迁移学习的目标检测和机械臂抓取位姿估计李万艳1阮观强2张振东3(1 上海东海职业技术学院机电学院,上海200241)(2 上海电机学院机械学院,上海201306)(3 上海理工大学机械学院,上海200093)摘要针对传统机器学习算法视觉识别准确率低、运行时间缓慢等问题,研究针对家庭场景中机器人做家务的场景,利用RGB图像信息为输入,完成对目标物体的抓取位姿估计。
以目标检测模型YOLOv5s为基础,利用其轻便、速度快的优点,结合数据增强以及迁移学习搭建网络架构,搭建家庭场景数据集;将少量训练样本进行数据增强后,利用迁移学习将模型在目标数据集上训练,同时微调参数,将目标物体的定位信息通过坐标变换转换为机械臂的抓取位姿,控制机械臂最终以固定抓取姿态完成抓取任务;最后,通过搭建实验平台,操纵UR5机械臂进行实际抓取实验,验证了算法的有效性。
提出的基于目标检测的方法速度快、实时性高、误/漏识别率小于2%,应用在机械臂抓取上可以高效地完成任务。
关键词YOLOv5s 机械臂位姿估计目标检测迁移学习Target Detection and Robotic Arm Grasp Pose Estimation Based on YOLOv5and Transfer LearningLi Wanyan1Ruan Guanqiang2Zhang Zhendong3(1 School of Mechanical and Electrical Engineering, Shanghai Donghai Vocational & Technical College, Shanghai 200241, China)(2 School of Mechanical Engineering, Shanghai Dianji University, Shanghai 201306, China)(3 School of Mechanical Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China)Abstract For traditional machine learning algorithms, visual recognition algorithms have low recogni‑tion accuracy and slow running time. This research studies the scene of the robot doing housework in the fam‑ily scene, and uses the RGB image information as input to complete the grasping pose estimation of the target object. Based on the object detection model YOLOv5s, the network architecture is built by combining data en‑hancement and transfer learning with its advantages of lightweight and fast speed.After building a family scene data set to enhance the data of a small number of training samples, the model is trained on the target da‑ta set using transfer learning, and the parameters are fine-tuned at the same time. The positioning informa‑tion of the target object is transformed into the grasping pose of the robotic arm through coordinate transforma‑tion, and the robotic arm is controlled to finally complete the grasping task with a fixed grasping posture. Fi‑nally, the effectiveness of the algorithm is verified by building an experimental platform and manipulating the UR5 robotic arm to carry out actual grasping experiments. The proposed method based on target detection is fast, has high real-time performance, and has a false/missed recognition rate of less than 2%. The application in the robotic arm can efficiently complete the task.Key words YOLOv5s Robotic arm Pose estimation Target detection Transfer learning0 引言当今社会人口老龄化进程不断加速,人力成本显著增加,使用机械臂代替人力作业的应用变得愈加广泛。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《机电控制综合实践》报告年至年第学期学院:机械学院专业:机械电子工程班级:报告人:学号:指导教师:印松汪烨张蕾钱华起止日期提交日期:机电控制综合实践(一)设计要求系统主要采用增量式编码器 1000ppr/2500ppr、E10系列200W伺服电机、CTSD E10-B2012-M000步科驱动器、Kinco步科两相步进电机和2M420步进驱动器来控制平台上X 轴、Y轴的移动。
还可以通过 TK6070iK 触摸屏在线控制 X、Y 轴方向上自动和点动的运动,同时触摸屏可在线实时显示在 X、Y 轴上的位移及速度,此外还包括任意位置任意时间的暂停、回零操作和实现按照输入的位移值、速度运动。
系统设计中采用不带“DOG” 点搜索”的回零方式,但是设计了零点和近点,采用了带有 DZRN 回零指令可实现任意状态时回零。
平台在两轴上按照一般速度运动,当达到近点位置时平台改为爬行速度继续运动到零点。
运动时,可以通过触摸屏在线实时控制平台的运动包括 X、Y 轴上的单独和同时运动,X、Y 轴上的单独和同时回零,任意位置的暂停和回零。
在设计期间,组员查阅了大量关于系统设备的参数和功用以及 PLC 的程序指令才能实现这些看似简单的运动,也由此可以看出 PLC 程序软件的功能强大。
(二)设计框图(三)硬件分析1、可编程控制器FX3U-32MFX3U系列是三菱电机适应用户需求开发出来的第三代微型可编程控制器。
它在诸多方面进行了增强。
首先,FX3U系列PLC的基本功能得到了大幅度的提升。
1. CPU处理速度达到了0.065us/基本指令。
2.内置了高达64K步的大容量RAM存储器。
3.通过CC-Link网络的扩展可以实现***多达384点的控制。
4.大幅增加了内部软元件的数量。
FX3U系列PLC中集成了多项业界领先的功能:1.晶体管输出型的基本单元内置了3轴独立100kHz的定位功能,并且增加了新的定位指令:不带DOG搜索的原点回归(ZRN),中断单速定位(DVIT)和表格设定定位(TBL),从而使得定位控制功能更加强大,使用更为方便。
2.FX3U系列专门增强了通信的功能,其内置的编程口可以达到115.2kbps的高速通信,而且可以同时使用3个通信口(包括编程口在内)。
2、CTSD E10-B2012-M000伺服驱动器型号:2M420名称:2M420步进驱动器详细资料及性能指标:2M420细分型两相混合式步进电机驱动器,采用直流20-40v供电,电流小于3A外径42~57毫米的两相混合式步进电机。
此驱动器采用DSP交流伺服驱动器的电流环进行细分控制,电机的转矩波动最小,低速运行很平稳,几乎没有震动和噪音。
高速时力矩也大大高于其它两相驱动器,定位精度高。
广泛适用于纺织机械,激光打标机,激光内雕机,测试设备,电子是设备上。
主要特点:平均电流控制,两相正弦电流驱动输出,直流20-40v供电光电隔离信号输入/输出,有过压、欠压、过流、相同短路保护功能十五档细分和自动半流功能八档输出相电流设置具有脱机命令输人端子电机的扭矩与它的转速有关,而与电机没转的步数无关;高启动转;速高速力矩大。
3、Kinco步科两相2M420步进电机技术参数型号:2S56Q-02741步距角 1.8°± 5%相电流 (A) 1.5保持扭矩 (Nm) 0.5 阻尼扭矩 (Nm) 0.02相电阻 (?) 1.8?10% 相电感 (mH)4.1±20%电机惯量(kg.cm)20.14 电机长度 L(mm)41引线数量 4 绝缘等级 B耐压等级300V AC 1秒最大轴向负载(N) 15最大径向负载 (N) 75 工作环境温度-20°C~ 50°C表面温升最高 80°C (两相接通额定电流) 绝缘阻抗最小100M?, 500V DC重量 (kg) 0.42 引出线长度 (mm) 300±10* 300±54、增量式编码器 1000ppr/2500ppr 增量型编码器由一个中心有轴的光电码盘,其上有环形通、暗的刻线,有光电发射和接收器件读取,获得四组正弦波信号组合成A、B、C、D,每个正弦波相差90度相位差(相对于一个周波为360度),将C、D信号反向,叠加在A、B两相上,可增强稳定信号;另每转输出一个Z相脉冲以代表零位参考位。
由于A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转和反转,通过零位脉冲,可获得编码器的零位参考位。
编码器码盘的材料有玻璃、金属、塑料,玻璃码盘是在玻璃上沉积很薄的刻线,其热稳定性好,精度高,金属码盘直接以通和不通刻线,不易碎,但由于金属有一定的厚度,精度就有限制,其热稳定性就要比玻璃的差一个数量级,塑料码盘是经济型的,其成本低,但精度、热稳定性、寿命均要差一些。
分辨率―编码器以每旋转360度提供多少的通或暗刻线称为分辨率,也称解析分度、或直接称多少线,一般在每转分度5~10000线。
5、E10系列200W伺服电机型号说明E10 200W输入电源主电源单相 220VAC ?15%,50/60Hz控制电源 24VDC ±15%编码器反馈增量式编码器 1000ppr/2500ppr冷却方式 200W、400W自然冷却,400W以上风冷控制方式采用 FOC(磁场定位控制)和 SVPWM(空间矢量调制)通讯功能基于RS-485的ModBus协议,支持广播,CANOPEN协议制动电阻内置制动电阻/可外部制动电阻(主要应用在急速启停场合)保护功能过压、欠压、过流、过载、过热、过速、位置偏差过大、编码器反馈错误、制动率过大、行程超限、EEPROM错误显示及操作 5为指示灯,可外接伺服调试器参数设置 MagicWorks Tuner软件性能速度变动率负载变动率 0~100%:0.1%以下(在额定转速下)电压变动率额定电压±15%:0%(在额定转速下)温度变动率 25?25℃:?0.1%以下(在额定转速下)频率特性 100Hz(JL=JM时)集成PLC控制功能可选输入输出信号位置输出输出类型集电极开路输出,不能分频数字输入7路DI伺服使能、解除报警、顺/逆时针行程限位、内部速度选择、转矩限制选择、齿轮比切换、模式切换、增益切换、脉冲输入禁止、零速锁定、位置偏差清除,可通过IO复用功能寄存器选择数字输出4路DO伺服准备好、报警输出、转矩限制输出、定位完成、速度到达、零速检测输出、制动器解除输出,可通过IO复用功能寄存器选择模拟量输入 1路输入(12位A/D) 模拟量输出--IP等级 IP20 安装地点无腐蚀性气体、易燃气体、油雾或尘埃等安装方式垂直安装标高海拔≤1000m额定功率(W) 200 伺服电机型号CTSD M16-B2012-M100 适配驱动器CTSD E10-B2012-M000 额定线电压(V) 220额定线电流(A) 1.5 额定转速(rpm) 3000额定力矩(Nm) 0.637 峰值力矩(Nm) 1.3反电势(V/1000rpm) 28 力矩系数(Nm/A) 0.42转子惯量(Kg穖2) 0.17?10-4 绕组(线间)电阻(?) 11.6绕组(线间)电感(mH) 22 电气时间常数(ms) 1.9重量(Kg) 1.11 位置反馈2500ppr绝缘等级Class B(130℃)防护等级IP64使用环境环境温度: -20℃~ +50℃环境湿度:相对湿度<90%(不结霜条件)电机绕组插座绕组引线U(红) V(黄) W(蓝) PE(黄绿/黑)插座编号 1 2 3 4编码器插座信号引线5V 0V B+ Z- U+ Z+ U- A+ V+ W+ V- A- B- W- PE插座编号 2 3 4 5 6 7 8 9 10 11 12 1314 15 1颜色红黑绿黄黑棕黄棕黑蓝灰白灰黑蓝黑绿黑白黑E系列E10经济型伺服驱动器1功率0.2~1.0KW;2单相220VAC供电;3支持位置控制、速度控制和转矩控制模式;4内置位置表格功能和多段速功能;5面向应用的控制功能,包括色标捕捉定长运行功能等;6支持RS485 Modbus 协议;7可选支持CANopen总线。
8E10系列200W伺服电机6、TK6100I 触摸屏显示显示类型10”TFT分辨率 (WxH dots) 800 x 480显示亮度 (cd/m2) 300 对比度500:01:00背光类型LED 背光寿命30,000小时显示色彩65536 触控面板类型4线模拟电阻式内存Flash储存器 (MB) 128 DRAM (MB) 64处理器32Bit RISC 400MHz 通讯端口SD 卡插槽无USB 主设备无Mini USB 下载口USB 2.0 x 1以太网络无COM连接端口 Com1: RS-232/RS-485 2w/4w, Com3: RS-485 2w 声音输出无电源输入电源24±20%VDC电源功耗300mA@24VDC 抗震10 to 25Hz(X,Y,Z 方向 2G30分钟) 规格外壳材质工业塑料重量 (kg) 约1.3 kg操作环境防护等级NEMA4 / IP65 欧盟CE认证EN 55022:2006,Class A EN 61000-3-2:2006,EN 61000-3-3:1995+A1:2001+A2:2005 EN 55024:1998+A1:2001+A2:20037、机电综合实践装置(1套)8、万用表(1台)9、实验工具(若干)10、实验连接导线(若干)三、主要元器件名细表五、列出PLC I/O地址分配表,编写PLC程序(包括注释)(一) PLC I/O 地址分配表1、梯形图如下:2、触摸屏设计①主界面②手动控制界面③自动控制界面④各部分功能X轴手动回零Y轴手动回零X、Y轴手动进给位移、速度显示位移、速度设置X、Y轴同时回零手动自动模式切换暂停按钮六、调试流程(包括调试过程中存在的问题、解决问题的思路及办法)调试流程:调试中遇到的问题与反思:1、单轴的自动往复运动,通过接近开关使方向输出端得失电,使得运动到接近开关时,自动反向。
2、不带“DOG 点搜索”的回零:采用的是 DZRN 指令,刚开始后面几个参数一直设的不好,原点回归速度过大,容易事电机空转。
近点与零点的位置不能太近,为了解决这一问题,我们调整了接近开关的位置。
3、随着程序的增多,前后的干扰增大,因为PLC是采用扫描的方式读程序,为了避免前后干扰,尽量采用一个输出,多个开关设置的方式。
4、增量方式:采用的是DRVA指令,刚开始一直往反方向运动,为了解决这一问题,改变了驱动器的输出脉冲A+、A-。
5、在调试中一定要把监视打开,这样可以很方便的找到问题出在哪里,结果错在哪儿,就去找相应程序的状态,这样有便于纠错。