接触网腕臂偏移计算表
腕臂计算原理(发布)(1)-1

三、现场安装情况
三、转换柱非支腕臂计算 计算L08#非支斜腕臂。
已知参数: Cx=2517mm,δ=29mm/m, Hs=7800mm,Hx=6000mm, Hj=6400mm,Hc=7800mm, Hf=500mm,Lpb=Lxb=690mm, Ks=Kx=180mm,Ht=105mm,a=300mm,Ltc=300mm, Lcg=200mm 1. 计算套管双耳至棒平耳孔 水平距离:
L1 CX Ps c Ks a
=2517+7.8×29+0-180-(-100) =2663.2mm 2. 计算平腕臂长度:
P1 L1 Lcg Lpb
=2663.2+300-690 =2273.2mm 3. 依次计算套管双耳和承力索座位置:Lc=2273.2-300=1973.2mmmm Lt=1973.2-300=1673.2mm
4.安装图参数: 拉出值a=-300mm,Ltc=300mm,Lcg=200mm
三、转换柱非支腕臂计算 计算L08#非支平腕臂。
已知参数: Cx=2517mm,δ=29mm/m, Hs=7800mm,Hx=6000mm, Hj=6400mm,Hc=7800mm, Hf=500mm,Lpb=Lxb=690mm, Ks=Kx=180mm,Ht=105mm,a=300mm,Ltc=300mm, Lcg=200mm 1. 计算承力索座至上底座接棒瓶 孔水平距离:
L1 CX Ps c Ks a
=2517+7.8×29+0-180-(-300) =2863.2mm 2 L 2 L2 2863 .2 2 500 2 2906 .53mm 1 Hf
P2 L2 Lcg Lpb 2906 .53 200 690 2417 mm
接触网大修更换承力索时解决平腕臂(斜腕臂)偏移问题及 值控制
接触网大修更换承力索时解决平腕臂(斜腕臂)偏移问题及值控制摘要:从接触网大修工程中更换承力索施工当中,总结出影响承力索倒接后b值控制以及平腕臂(斜腕臂)发生偏移的因素,并找到了解决办法。
对类似大修换线施工和新建电气化铁路线承力索架设提供了思路和方法。
关键词:接触网;b值;平腕臂(斜腕臂)偏移;施工1.引言在接触网大修工程中承力索倒接后平腕臂(斜腕臂)发生偏移以及承力索坠砣值不能达到标准是长期以来亟待解决的问题。
通常在进行承力索倒接时,一般是在倒新承力索时,平腕臂(斜腕臂)向中锚方向偏一些,坠砣在承力索倒接放线前提升1.5m~2m的高度。
此种方法没有对承力索倒接过程中承力索的线胀系数、线索弹性延伸、线索蠕动等一些变化量的产生进行定性分析和定量计算,其结果直接导致承力索倒接后,腕臂和定位偏移过大,从而使接触网几何参数发生变化,在参数超出极限值后将导致机车受电弓刮弓、钻弓等事故,严重情况下将影响整个锚段接触网设备的运行状况,这时需调整平腕臂(斜腕臂)和坠砣b值,大大影响了有限天窗时间。
要解决这一问题,首先应明确承力索在倒接过程中影响平腕臂(斜腕臂)偏移和影响b值的因素,以及在倒替后的环境变化对承力索的影响等。
2.影响值的几个因素2.1新线延伸量对值的影响《铁路电力牵引供电施工规范》(TB10208—98)5.9.8条规定,未经超拉的新铜承力索延伸率为4×10-4~7×10-4(取5×10-4),则承力索延伸量:(1)反映到值变化为:(2)其中,为滑轮传动比。
2.2曲线区段线长度变化量在曲线区段,由于曲线力的作用,新旧承力索会产生一段水平距离,在倒承力索后会对值产生一定影响。
如图1。
图1 曲线段线索长度变化示意图其中,为曲线半径;为新承力索倒接后的状态;为新承力索倒接前的状态。
为倒接前后的水平距离。
由图得:则新承力索在倒承力索后的长度变化量其中,(3)则(4)通过补偿反映到值变化即:(5)其中值的产生是由于线索所受曲线力而形成,可作如下近似计算。
腕臂计算(1)

武九支柱腕臂计算(中间柱)【单腕臂】一.计算条件1.需要测量的数据(1)现场实测的斜率值X1(斜率仪测量)之后需转换成斜率的转换值f=(80-68*2+X1)/1000,其中80为垂直线路侧的斜率,68为顺线路方向的斜率;(【】)(2)侧面限界CX;(3)线路超高h1(曲外为正,曲内为负)之后需算出接触线距线路中心c=a-m的值,c=a-h1*H/L,其中H为导线高度6450,L为两轨间距1435;2.图纸上给定的数据(1)导线高度和结构高度分别为6450和1400;(2)拉出值:直线一般是±300;曲外一般为+150,曲内一般为-150;(3)混凝土支柱H78、H93的总高是9.2+3,其中:埋深至钢轨的距离是3950,但考虑到支柱下陷,以3970进行腕臂计算;3.材料上量出的数据(1)上底座通长130,但支柱在埋深不够的情况下,所采取的孔外装时另需外加60的槽钢厚度,即算190;(2)下底座通长100,和上底座的一样,孔外装时另需外加60的槽钢厚度,即算160;(3)P棒瓷通长840(双重绝缘);单重绝缘740(4)X棒瓷通长790(双重绝缘);单重绝缘690(5)承力索座至P腕臂的边缘距离为88;(6)五孔套管双耳中心至P腕臂的边缘距离为74;4.技术参数(1)上、下底座之间的距离1750(支柱)〖小限界时,也需调整为1550左右〗;【2500的吊柱通常是1550】(2)定位器坡度400(矩形(限位)定位器),也就是定位点至定位管中心的距离;【站线定位器通常取300】(3)五孔套管双耳中心至承力索座中心的距离300〖小限界时,需调整为350〗,而承力索座中心至P腕臂的边缘距离为350,其中二者之和为650〖小限界时,需调整为700〗;(4)由导线高度和结构高度分别为6450和1400,可得到下底座的为6450+1400-88-1750=6012【注:YHL的钢柱和孔外装的水泥柱的计算就按下底座至轨平面6012的位置进行安装和计算,上下底座间距1750的位置进行安装和计算】;○注根据不同的轨面连线至支柱标示【3900,即支柱底部外露的一孔和二孔中间的位置】(以轨面为基准)h2、支柱下底至钢轨连线,即支柱埋深3950(计算时:以3970为计)和以3900为基准可计算出下底座的安装高度h为6012+3970-(3900-h2)=?,这时更需注意以6012上下浮动200的范围内都采用孔内装,反之,若超过时,则采用孔外装。
腕臂计算(1)
腕臂计算(1)武九支柱腕臂计算(中间柱)【单腕臂】一.计算条件1.需要测量的数据(1)现场实测的斜率值X1(斜率仪测量)之后需转换成斜率的转换值f=(80-68*2+X1)/1000,其中80为垂直线路侧的斜率,68为顺线路方向的斜率;(【】)(2)侧面限界CX;(3)线路超高h1(曲外为正,曲内为负)之后需算出接触线距线路中心c=a-m的值,c=a-h1*H/L,其中H为导线高度6450,L为两轨间距1435;2.图纸上给定的数据(1)导线高度和结构高度分别为6450和1400;(2)拉出值:直线一般是±300;曲外一般为+150,曲内一般为-150;(3)混凝土支柱H78、H93的总高是9.2+3,其中:埋深至钢轨的距离是3950,但考虑到支柱下陷,以3970进行腕臂计算;3.材料上量出的数据(1)上底座通长130,但支柱在埋深不够的情况下,所采取的孔外装时另需外加60的槽钢厚度,即算190;(2)下底座通长100,和上底座的一样,孔外装时另需外加60的槽钢厚度,即算160;(3)P棒瓷通长840(双重绝缘);单重绝缘740(4)X棒瓷通长790(双重绝缘);单重绝缘690(5)承力索座至P腕臂的边缘距离为88;(6)五孔套管双耳中心至P腕臂的边缘距离为74;4.技术参数(1)上、下底座之间的距离1750(支柱)〖小限界时,也需调整为1550左右〗;【2500的吊柱通常是1550】(2)定位器坡度400(矩形(限位)定位器),也就是定位点至定位管中心的距离;【站线定位器通常取300】(3)五孔套管双耳中心至承力索座中心的距离300〖小限界时,需调整为350〗,而承力索座中心至P腕臂的边缘距离为350,其中二者之和为650〖小限界时,需调整为700〗;(4)由导线高度和结构高度分别为6450和1400,可得到下底座的为6450+1400-88-1750=6012【注:YHL的钢柱和孔外装的水泥柱的计算就按下底座至轨平面6012的位置进行安装和计算,上下底座间距1750的位置进行安装和计算】;○注根据不同的轨面连线至支柱标示【3900,即支柱底部外露的一孔和二孔中间的位置】(以轨面为基准)h2、支柱下底至钢轨连线,即支柱埋深3950(计算时:以3970为计)和以3900为基准可计算出下底座的安装高度h为6012+3970-(3900-h2)=?,这时更需注意以6012上下浮动200的范围内都采用孔内装,反之,若超过时,则采用孔外装。
广清城轨接触网中间柱腕臂及腕臂支撑计算
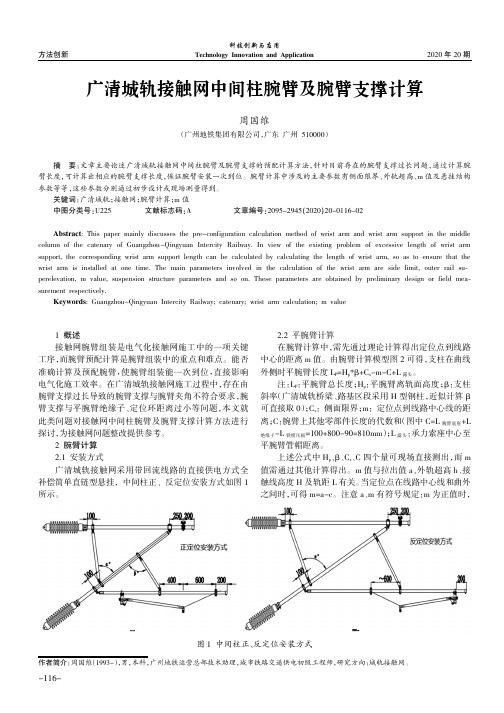
2020年20期方法创新科技创新与应用Technology Innovation and Application广清城轨接触网中间柱腕臂及腕臂支撑计算周国维(广州地铁集团有限公司,广东广州510000)1概述接触网腕臂组装是电气化接触网施工中的一项关键工序,而腕臂预配计算是腕臂组装中的重点和难点。
能否准确计算及预配腕臂,使腕臂组装能一次到位,直接影响电气化施工效率。
在广清城轨接触网施工过程中,存在由腕臂支撑过长导致的腕臂支撑与腕臂夹角不符合要求,腕臂支撑与平腕臂绝缘子、定位环距离过小等问题,本文就此类问题对接触网中间柱腕臂及腕臂支撑计算方法进行探讨,为接触网问题整改提供参考。
2腕臂计算2.1安装方式广清城轨接触网采用带回流线路的直接供电方式全补偿简单直链型悬挂,中间柱正、反定位安装方式如图1所示。
2.2平腕臂计算在腕臂计算中,需先通过理论计算得出定位点到线路中心的距离m 值。
由腕臂计算模型图2可得,支柱在曲线外侧时平腕臂长度L P =H p *β+C x -m-C+L 露头。
注:L P :平腕臂总长度;H p :平腕臂离轨面高度;β:支柱斜率(广清城轨桥梁、路基区段采用H 型钢柱,近似计算β可直接取0);C x :侧面限界;m :定位点到线路中心线的距离;C :腕臂上其他零部件长度的代数和(图中C=L 腕臂底座+L 绝缘子-L 铁模压板=100+800-90=810mm );L 露头:承力索座中心至平腕臂管帽距离。
上述公式中H p 、β、C x 、C 四个量可现场直接测出,而m 值需通过其他计算得出。
m 值与拉出值a 、外轨超高h 、接触线高度H 及轨距L 有关。
当定位点在线路中心线和曲外之间时,可得m=a-c 。
注意a 、m 有符号规定:m 为正值时,摘要:文章主要论述广清城轨接触网中间柱腕臂及腕臂支撑的预配计算方法,针对目前存在的腕臂支撑过长问题,通过计算腕臂长度,可计算出相应的腕臂支撑长度,保证腕臂安装一次到位。
接触网计算

中定位环 定位管长 位置1 度1 定位坡度
当拉出值为 直线反定位 值,根据拉 出值不同, 输入-0.2或 -0.3。其余 均为正值。
锚柱 非支 近开 口
2.67 2.716 2.673 2.745 2.786 2.796 2.957 2.844
0.028 0.033 0.043 0.071 0.094 0.107 0.103 0.101
0.029 0.012 0.019 0.022 0.023 0.02 0.025 0.022
0.21 0.087 0.137 0.159 0.166 0.145 0.181 0.159
0.014 0.101 0.077 0.022 0.159 0.122 0.014 0.101 0.077 -0.01 -0.07 -0.06
1.63 2.735475556 1.63 2.944785 1.63 2.462211667 1.63 2.6547
锚柱 非支 远开 口
99 H60 非支 近开 口 锚柱
2.93 0.088 2.89 0.083 2.8 0.08 2.93 0.082 2.94 0.083
0.08 0.061
1.63 2.706941111 1.63 1.63 1.63 1.63 2.680303889 2.564035556 2.676524444 2.780073889
锚柱 非支 近开 口
0.116 0.231 0.166 0.181 0.181 0.21 0.108 0.159 0.174 0.166 0.108 0.239 0.224
0.088 0.177 0.127 0.138 0.138 0.16 0.083 0.122 0.133 0.127 0.083 0.182 0.171
接触网腕臂计算模型
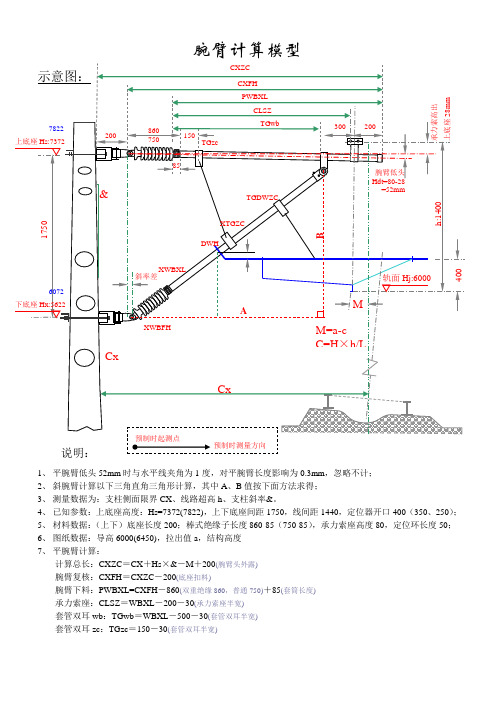
腕臂计算模型1、平腕臂低头52mm时与水平线夹角为1度,对平腕臂长度影响为0.3mm,忽略不计;2、斜腕臂计算以下三角直角三角形计算,其中A、B值按下面方法求得;3、测量数据为:支柱侧面限界CX、线路超高h、支柱斜率&。
4、已知参数:上底座高度:Hs=7372(7822),上下底座间距1750,线间距1440,定位器开口400(350、250);5、材料数据:(上下)底座长度200;棒式绝缘子长度860-85(750-85),承力索座高度80,定位环长度50;6、图纸数据:导高6000(6450),拉出值a,结构高度7、平腕臂计算:计算总长:CXZC=CX+Hs×&-M+200(腕臂头外露)腕臂复核:CXFH=CXZC-200(底座扣料)腕臂下料:PWBXL=CXFH-860(双重绝缘860,普通750)+85(套筒长度)承力索座:CLSZ=WBXL-200-30(承力索座半宽)套管双耳wb:TGwb=WBXL-500-30(套管双耳半宽)套管双耳zc:TGzc=150-30(套管双耳半宽)8、斜腕臂计算:直角边A:A=TGwb+30(套管双耳半宽)+860(双重绝缘860,普通750)-85(套筒长度)-1.75&(斜率差)直角边B:B=1750(底座间距)-50(此处腕臂低头折算值)-80(套管双耳扣料长度)斜腕臂复核长度:XWBFH=SQRT(A^2+B^2)斜腕臂下料长度:XWBXL=XWBFH-860+85定位环位置:DWH=(6000+400-5622)×XWBFH÷A-860+85腕臂支持套管双耳位置:XTGZC= XWBXL -TGwb+150+85定位管支持套管双耳位置:TGDWZC= XTGZC+410(定位管支撑长度)+80(套管双耳扣料长度)9、定位管上计算:正定位定位管长度:ZDWGC=CX+5.622&-M-(6000+400-5622)×A÷B-200(底座扣料)-50(定位环扣料)+600(防风拉线长度)+200(定位管外露长度)反定位定位管长度:FDWGC=CX+5.622&-M-(6000+400-5622)×A÷B-200(底座扣料)-50(定位环扣料)+1200(1050定位器长度)+200(定位管外露长度)正定位管上定位环位置:ZGSDWH=ZDWGC-1200(1050定位器长度)-600-200反定位管上定位环位置:FGSDWH=FDWGC-200正定位防风拉线定位环位置:ZFFDWH= ZGSDWH-200正定位防风拉线定位环位置:FFFDWH= FGSDWH-1200(1050定位器长度)-600-200。
腕臂及定位计算表

倾斜值 下底座 底座 曲线 腕臂 拉出值 (mm 高度 间距 超高 抬高 (mm) (m) (mm) (mm) (mm) ) d 75 332 207.5 207.5 107.9 124.5 166 91.3 5.861 5.975 5.566 5.566 5.566 5.566 5.696 5.566 5.696 a -250 -375 375 -375 -400 -250 250 250
3124 2762 2060 2440 2464 2433 2134 2143 0 0 0 0 0 0 0 0
0.4829 0.52795 0.45819 0.52795 0.52795 0.45671 0.52795 0.45671 #DIV/0! #DIV/0! #DIV/0! #DIV/0! #DIV/0! #DIV/0! #DIV/0! #DIV/0!
1288 1232 604 1045 1058 813 866 665 #DIV/0! #DIV/0! #DIV/0! #DIV/0! #DIV/0! #DIV/0! #DIV/0! #DIV/0!
1 2 3 4ห้องสมุดไป่ตู้5 6 7 8
1 2 3 4 5 6 7 8
H93 H78 H78 H78 H78 H78 H78 H78
1800 -9.8 1900 0 1900 0 1900 0 1900 0 1900 0 1900 0 1900 0
0 0 300 0 0 0 0 0
8.3 8.3 8.3 8.3 8.3 8.3 8.3 8.3
定位管卡 斜率 腕臂 定位器 定位器 定位管 定位支 2"定位 定位管 子~定位 (mm/m 露头 长度 开口 外径 座高度 环尺寸 露头 线夹水平 (mm) (mm) (mm) (mm) (mm) (mm) (mm) ) 距离(mm) 300 300 300 300 300 300 300 300 300 1050 900 900 900 900 900 900 900 334 347 347 347 347 347 347 347 48 55 55 55 55 55 55 55 104 185 185 185 185 185 185 185 80 80 80 80 80 80 80 80 250 250 150 250 250 250 150 150 400 400 400 400 400 400 400 400 9 40 25 25 13 15 20 11