基于无迹卡尔曼滤波的车辆状态与参数估计
基于扩展卡尔曼滤波的车辆质量与道路坡度估计
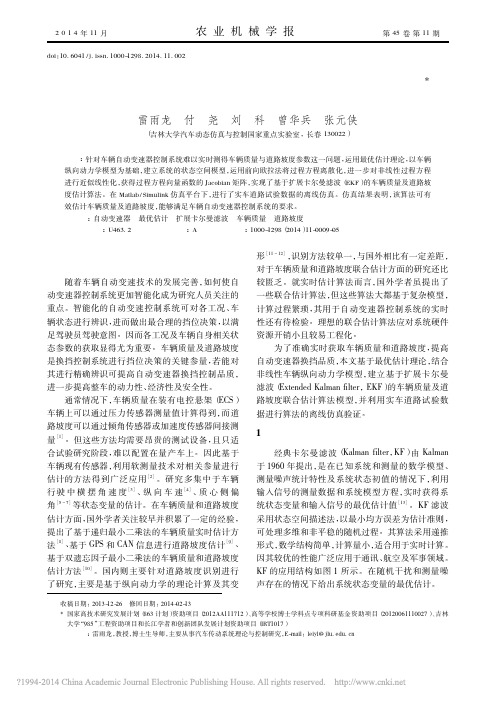
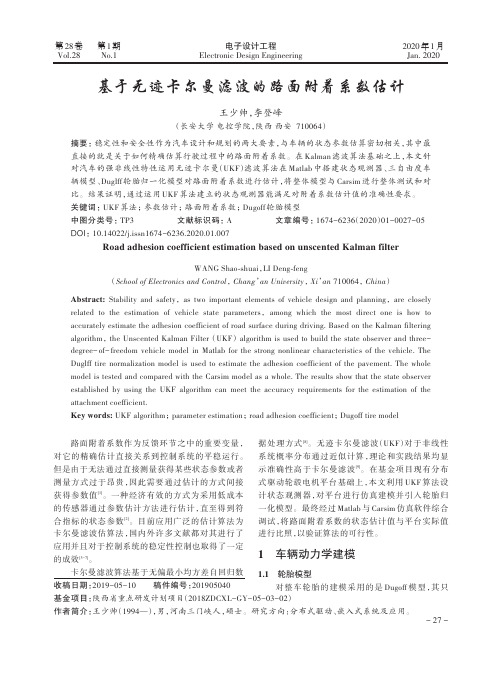
图2 Fig. 2
车辆坡道行驶纵向受力分析图 Longitudinal force analysis of vehicle under uphill condition
根据牛顿第二定律, 建立车辆的纵向动力学模 型 ( 1) Ff — — —滚动阻力 Fi — — —坡道阻力
·
程 T tq ( t k - 1 ) i g i0 η T v = v - gf - k k - 1 + Δt mk - 1 r 1 C Aρv2 k - 1 - gi k - 1 2 mk - 1 D mk = mk - 1 ik = ik - 1
(
v— — —车辆纵向加速度
为 Ft = T tq i g i0 η T r ( 2)
)
( 9)
式中
T tq — — —发动机输入到变速器的实际扭矩 ig — — —变速器传动比 i0 — — —主减速器传动比 — —传动系机械效率 ηT — r— — —车轮滚动半径 坡道阻力 F
[15 ] i
假设系统的过程噪声和测量噪声均为加性噪 声, 过程噪声向量和测量噪声向量分别为 W k 和 V k , 它们为相互独立、 且均值为零的高斯白噪声。 过程 激励噪声协方差矩阵为 Q k , 测量噪声协方差矩阵为 R k 。则有 E[ Wk VT k]= 0 ( 10 )
系统测量方程为 zk = [ 1 0 ( 14 ) 式中
测量更新方程为 K k = P k- H T ( HP k- H T + R k ) ^k = x ^ k- + K k ( z k - Hx ^ k- ) x P k = ( I - K k H) P
- k
-1
( 19 ) ( 20 ) ( 21 )
卡尔曼滤波进行状态估计模型

卡尔曼滤波进行状态估计模型
卡尔曼滤波是一种用于估计系统状态的强大工具,它在许多领域都有着广泛的应用,包括航空航天、自动控制、金融领域等。
本文将介绍卡尔曼滤波的基本原理和应用,并探讨其在状态估计模型中的重要性。
首先,让我们了解一下卡尔曼滤波的基本原理。
卡尔曼滤波是一种递归的状态估计方法,它通过将系统的动态模型和测量模型结合起来,不断地更新对系统状态的估计。
卡尔曼滤波的核心思想是利用系统的动态模型来预测下一个时刻的状态,然后利用测量值来修正这一预测,从而得到对系统真实状态的更准确估计。
在实际应用中,卡尔曼滤波通常用于处理带有噪声的传感器数据,以及对系统状态进行估计。
例如,在飞行器导航系统中,卡尔曼滤波可以用来估计飞行器的位置和速度,从而实现精确的导航控制。
在自动驾驶汽车中,卡尔曼滤波可以用来融合来自不同传感器的数据,以实现对车辆位置和周围环境的准确估计。
除了在航空航天和自动控制领域的应用外,卡尔曼滤波在金融领域也有着重要的应用。
例如,它可以用来对金融市场的波动进行
预测,从而帮助投资者做出更明智的决策。
总之,卡尔曼滤波是一种强大的状态估计方法,它在许多领域
都有着广泛的应用。
通过结合系统动态模型和测量模型,卡尔曼滤
波可以对系统状态进行准确的估计,从而为实际应用提供了重要的
支持。
希望本文能够帮助读者更好地理解卡尔曼滤波的原理和应用,并在实际工程中加以应用。
利用车辆状态估计的客车防侧翻控制
利用车辆状态估计的客车防侧翻控制
康小鹏;董浩;祁传琦;王辉
【期刊名称】《机械设计与制造》
【年(卷),期】2022()7
【摘要】为提高客车侧翻稳定性,提出了一种基于车辆状态估计的客车主动防侧翻控制方法。
针对客车行驶过程中直接计算侧翻指标LTR困难较大、准确度较低的问题,基于TruckSim整车模型和三自由度参考模型建立了无迹卡尔曼滤波(Unscented Kalman Filter,UKF)状态参数估计器。
结合现有车辆稳定性控制系统,设计了柔性PID控制器,以差动制动的原理对防侧翻附加横摆力矩进行补偿。
通过TruckSim/Simulink联合仿真平台对客车在鱼钩试验典型工况下进行了仿真试验,结果表明,设计的主动防侧翻控制系统在中、高车速时均能降低LTR值至阈值附近,有效提高了客车的侧翻稳定性。
【总页数】5页(P10-13)
【作者】康小鹏;董浩;祁传琦;王辉
【作者单位】成都大学机械工程学院;成都大学高等研究院
【正文语种】中文
【中图分类】TH16;U461.6
【相关文献】
1.大客车侧翻稳定性分析及防侧翻鲁棒控制
2.大客车侧翻稳定性分析及防侧翻鲁棒控制
3.基于非线性扰动估计的客车防侧翻控制
4.基于模糊控制的差动制动客车防侧翻控制
因版权原因,仅展示原文概要,查看原文内容请购买。
采用自适应无迹卡尔曼滤波器的车速和路面附着系数估计
采用自适应无迹卡尔曼滤波器的车速和路面附着系数估计张家旭;李静【摘要】针对车辆主动安全控制中的车速和路面附着系数这一关键信息,提出了一种实时估计该信息的滤波算法,同时建立了将包含时变噪声统计特性的七自由度非线性车辆动力学模型作为滤波算法的标称模型,以及一种自适应无迹卡尔曼滤波算法.该算法采用传统的无迹卡尔曼滤波器来估计车速和路面附着系数,同时利用次优Sage-Husa噪声估计器对系统的噪声统计特性进行实时更新,其中采用遗忘因子限制噪声估计器的记忆长度,使新近数据发挥重要作用,使陈旧数据逐渐被遗忘,从而解决了因系统标称模型误差、外界扰动等因素引起的噪声时变的问题.在不同路面条件下进行了多种工况的实验验证,并与无迹卡尔曼滤波器的估计结果进行对比分析,结果表明,该算法具有良好的鲁棒性,其估计精度高于无迹卡尔曼滤波器,且满足车辆主动安全控制系统的要求.【期刊名称】《西安交通大学学报》【年(卷),期】2016(050)003【总页数】8页(P68-75)【关键词】车辆动力学;自适应滤波;无迹卡尔曼滤波;次优Sage-Husa噪声估计器【作者】张家旭;李静【作者单位】吉林大学汽车仿真与控制国家重点实验室,130022,长春;中国第一汽车集团技术中心,130011,长春;吉林大学汽车仿真与控制国家重点实验室,130022,长春【正文语种】中文【中图分类】U461.1准确实时获取车辆的行驶状态与路面附着条件是实现车辆主动安全控制的必要前提,而这些信息通常无法直接测量,由此衍生出的基于车载传感器获得的车辆状态信息进行汽车状态参数估计成为近年来研究的热点[1-5]。
文献[6]基于滚动时域算法估计了车速和路面附着系数,文献[7]应用无迹卡尔曼滤波器(unscented Kalman filter, UKF)对汽车状态进行了估计,文献[8]采用扩展卡尔曼滤波器(extended Kalman filter, EKF)对汽车纵向车速和侧向车速进行了估计,文献[9]采用交互式多模型算法估计了车速和路面附着系数。
21645876_基于非线性车辆模型的行驶状态与路面附着系数估计
(7)
式中,犿 为车 身 质 量;狏狓 为 车 辆 纵 向 速 度;狏狔为 车 辆 侧 向 速 度;狉 为 车 辆 横 摆 角 速 度;犐狕 为 车 辆 横 摆 转
动惯量;犪狓 为车辆纵向加速度;犪狔 为车辆横向加速度;犪 为前桥至车辆质心处的距离;犫为后桥至车 辆 质 心
的距离;δ 为前轮转角;犜犳、犜狉 分别为前轮和后轮的轮距;犉狓_犳犾、犉狔_犳犾、犉狓_犳狉、犉狔_犳狉、犉狓_狉犾、犉狔_狉犾、犉狓_狉狉、犉狔_狉狉 分 别
狏狓 =犪狓 +狏狔狉 狏狔 =犪狔 -狏狓狉 由 此 ,可 以 得 到 车 轮 纵 向 和 横 向 加 速 度 的 表 达
(1) (2)
(3) (4)
犪狓 =犿1 [(犉狓_犳犾 +犉狓_犳狉 )cosδ+ (犉狔_犳犾 +犉狔_犳狉 )sinδ+犉狓_狉犾 +犉狓_狉狉 ] 犪狔 =犿1 [(-犉狓_犳犾 -犉狓_犳狉 )sinδ+ (犉狔_犳犾 +犉狔_犳狉 )cosδ+犉狔_狉犾 +犉狔_狉狉 ] 横摆角加速度可以表示为
(1.石家庄铁道大学 机械工程学院,河北 石家庄 050043; 2.河北省交通安全与控制重点实验室,河北 石家庄 050043)
摘要:路面状况和行驶状态的准确识别是车 辆安全行 驶和 主动 控制 的重要依 据。为 了 验 证 车辆行驶状态和路面附着系数估计的有效性,建立了包含 Dugoff轮胎模型的四轮三自由度整车 仿真模型,提出了基于扩展 Kalman滤波 理 论 的 车 辆 行 驶 状 态 与 路 面 附 着 系 数 估 计 算 法。 车 辆 在设定的双移线路面附着系数分别为0.8、0.7、0.6的工况 下进 行仿 真,对比 车辆 的运 动 状 态 和 车辆转向输入激励的趋势的一致性,验证了该模型的合理性。结合该模型计算出的 Dugoff轮胎 模型纵向和侧向归一化力,通过 Matlab编程实现扩展卡尔曼 算法 估计,算法 估算 得 到 的 汽 车 行 驶状态参量和路面 附 着 系 数 与 仿 真 值 进 行 对 比。 通 过 结 果 对 比 表 明,车 辆 行 驶 状 态 估 计 值 与 Simulink数值解的均方根误差(RMSE)指 标 最 大 值 不 大 于 0.03,由 于 轮 胎 与 路 面 是 动 态 接 触, 路面附着系数呈上下波动状,实现 了 对 车 辆 行 驶 状 态 参 量 和 路 面 附 着 系 数 的 实 时 估 计,为 重 型 车辆稳定性控制提供了理论基础。
基于无迹卡尔曼滤波的路面附着系数估计
Vol.28
第1期
No.1
电子设计工程
Electronic Design Engineering
2020 年 1 月
Jan. 2020
基于无迹卡尔曼滤波的路面附着系数估计
王少帅,李登峰
(长安大学 电控学院,陕西 西安 710064)
摘要:稳定性和安全性作为汽车设计和规划的两大要素,与车辆的状态参数估算密切相关,其中最
hg
hg
F zrl = m∙g∙ b - m∙a x∙ + m∙a x∙ ∙a
established by using the UKF algorithm can meet the accuracy requirements for the estimation of the
attachment coefficient.
Key words: UKF algorithm;parameter estimation;road adhesion coefficient;Dugoff tire model
表1
关注于滑动率和刚度而无需考虑车轮径向变形、横
摆 角 、轮 速 ,计 算 结 果 和 误 差 符 合 实 验 要 求
[10- 12]
。
Dugoff 轮胎模型受力分析如图 1 所示。
车辆模型部分变量含义附着系数
vij
每个车轮的速度
λ
滑移率
Cx、Cy
轮胎纵向刚度、侧偏刚度,
FNx、FNy
轮胎的纵向、侧向力
ω
车轮转速
车轮垂向载荷计算公式(7)~(10)如下所示:
hg
hg
F zfl = m∙g∙ b - m∙a x∙ + m∙a x∙ ∙b
基于卡尔曼滤波-LSTM模型的车速估计方法

基于卡尔曼滤波-LSTM模型的车速估计方法基于卡尔曼滤波-LSTM模型的车速估计方法摘要:车辆速度的准确估计是智能交通系统中的一个重要问题。
本文基于卡尔曼滤波与长短期记忆网络(LSTM)模型相结合的方法,提出了一种车速估计方法。
通过对车辆的传感器数据进行融合处理,并结合时间序列预测模型,可以更准确地预测车辆的速度。
实验证明,基于卡尔曼滤波-LSTM模型的车速估计方法能够在真实道路环境中取得较高的准确性和稳定性。
关键词:车辆速度估计,卡尔曼滤波,长短期记忆网络,时间序列预测1. 引言车辆速度估计在智能交通系统中具有广泛的应用,如事故预警、交通流量分析、路径规划等。
准确的车速估计可以提高交通系统的效率和安全性。
然而,由于道路环境的复杂性以及车辆传感器的误差等因素,车辆速度的准确估计一直是一个难题。
2. 相关工作目前,已经有许多方法用于车速估计,如基于GPS的方法、基于传感器数据的方法等。
然而,这些方法存在着不同程度的误差和稳定性问题。
为了提高车速估计的准确性和稳定性,我们引入了卡尔曼滤波与LSTM模型相结合的方法。
3. 方法介绍3.1 卡尔曼滤波卡尔曼滤波是一种基于状态空间模型的最优估计算法。
它通过递归地估计线性系统的状态,并结合观测数据来提高估计的准确性。
在车速估计中,我们可以将车辆的运动状态建模为一个线性动力学系统,并通过卡尔曼滤波来估计车辆的速度。
3.2 LSTM模型LSTM是一种特殊的循环神经网络(RNN),它可以处理时间序列数据并具有长短期记忆能力。
在车速估计中,我们可以将车辆的传感器数据作为输入序列,通过LSTM模型来预测下一个时间步的车速。
通过结合卡尔曼滤波和LSTM模型,我们可以更准确地估计车辆的速度。
4. 实验结果我们在真实道路环境中进行了实验,采集了车辆的传感器数据,并与真实速度进行比较。
实验结果表明,基于卡尔曼滤波-LSTM模型的车速估计方法相较于传统方法,具有更高的准确性和稳定性。
卡尔曼滤波在车辆速度估计中的应用
卡尔曼滤波在车辆速度估计中的应用摘要:在车辆的运行过程中,准确的车速计算不仅是防抱死制动系统和车身稳定系统工作的基本条件。
同时也是车辆主被动安全控制系统正常工作的必要条件。
目前车速的计算普遍采用基于轮速的估计方法。
但是在车身发生滑动的情况下,该方法会存在较大的误差。
本文介绍了一种基于卡尔曼滤波和模糊逻辑的车速估计方法。
模拟数据显示,在车身发生相对滑动时,还是在车辆正常行驶时,该方法都能保证车速的准确性。
关键词:车速;滑动;卡尔曼滤波;模糊逻辑Application of Kalman filter on the vehicle speed estimationXiaowei QiaoAbstract: during vehicle driving process, accurate longitude vehicle speed calculation is not only the base condition for anti-lock brake system(ABS) and electronic stable program(ESP), but also is the critical requirement for vehicle active or passive safety system. estimation method based on wheel speed is adopted usually. But in case of the host vehicle is sliding. This method can produce enormous errors. This paper introduce an estimation method that based on the Kalman filter. Result from simulation shows that, this method can remain accuracy both in normal and sliding scenarios.Keyword: longitude vehicle speed, sliding, Kalman filter, fuzzy logic.1、引言在防抱死制动系统及车身稳定系统的应用中,准确车速的估计是这些系统有效实施的关键因素。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
8
农
业
机
械
学
报
2011年
学控制的核心是控制轮胎与地面的作用力 。本文轮 胎侧向力的估计应用简化魔术公式来实现 。对于驱 动轮纵向力的估计, 若通过其旋转自由度来建立物 将涉及施加在轮胎上的驱动或制动力矩 , 该 理方程, 3 ~ 物理量 通 常 不 易 获 得。 因 此, 本 文 参 考 文 献[ , 4] 将其看作自适应变量, 通过一阶高斯过程进行 处理。从而有状态变量 xs = [ v x v y ω r a x a y F x1 F x2 F z1 F z2 F z3 F z4
2 0 1 1 年 12 月
农 业 机 械 学 报
第 42 数估计
解少博 林 程
( 北京理工大学机械与车辆学院 ,北京 100081 )
*
【摘要】 准确获取车辆运动过程中的状态变量和时变模型参数可以提高动力学控制的鲁棒性 。 引入了车辆 建立了车辆动力学状态空间模型 , 应用无迹卡尔曼滤波 ( UKF ) 算法对车辆状态变量和参数 模型时变参数的概念, 进行了估计。与车辆动力学软件 CarMaker 建立的参考模型对比表明 , 该估计方法具有可行性和准确性 。在估计系 统中, 提出含自适应参数的简化魔术公式来表达轮胎侧偏力 , 减少了模型参数, 并且实现了对轮胎侧向力的准确估 计。 关键词: 车辆动力学 中图分类号: U461. 91 状态估计 模型时变参数 无迹卡尔曼滤波 轮胎模型 文献标识码: A 1298 ( 2011 ) 12000607 文章编号: 1000-
State and Parameters Estimation of Vehicle Based on UKF
Xie Shaobo Lin Cheng
( School of Mechanical Engineering,Beijing Institute of Technology,Beijing 100081 ,China)
[11 ] 式轮胎模型 ( Gim 模型 ) 和半经验模型 ( 魔术公 式) 都能准确计算出 轮 胎 在 特 定 附 着 路 面 的 侧 偏
力。但这些模型涉及较多的参数, 如纯侧偏工况下 的魔术公式参数多达 8 个, 并且有些参数依赖于轮 胎载荷和路面附着系数。 在车辆行驶过程中, 影响 轮胎和地面相互作用的因素不断变化, 用确定性的 轮胎参数不能揭示其动态受力过程, 尤其当车辆行 驶在不同附着系数路面时。 在车辆动力学建模中, 为了既能准确刻画轮胎力又能减少参数以降低系统 复杂度, 本文将 Pacejka 的魔术公式进行简化并引 入动态参数来表达轮胎的侧偏力 F y ( t) = F z ( t) C ( t) sin( Darctan( Eα( t) ) ) — —侧偏力 F z ( t) — — —垂直载荷 式中 F y ( t) — — —侧偏角 α( t ) — D— — —曲线形状因子 E— — —拟合参数
Abstract Accurate estimation of vehicle state variables and uncertain parameters can improve the robustness of vehicle dynamic control system. The concept of uncertain vehicle parameterset was proposed. The state space model for the estimation system was established. The estimation of the state variables and uncertain parameterset were completed based on the UKF theory. The comparison with the reference model showed that the estimation method was effective and could get the precise results. A transformed magic formula tire model was also proposed to calculate the cornering force in the estimation process. The tire model reduced the parameters and could realize the precise estimation of tire lateral force. Key words Vehicle system dynamics,State estimation,Model timevarying parameters,UKF, Tire model 展卡尔曼滤波( extended Kalman filter,简称 EKF) 应 用最为广泛。对于车辆参数的估计, 多见于用 EKF [7 ~ 9 ] 。对局部变量和 对不同形式轮胎模型进行辨识 参数的估计未能全面揭示车辆时变特征, 把状态变 量和所有参数看成时变量更接近车辆的动态本质 。 EKF 通过泰勒展开将非线性系统进 在估计方法上, 行线性化近似, 引入了截断误差, 使变量尤其参数的 估 计 难 以 达 到 很 高 精 度, 甚至导致估计结果发 [10 ] 。 ( unscented Kalman filter, 散 无迹 卡 尔 曼 滤 波 简称 UKF) 是卡尔曼滤波框架下利用确定性采样进 在处理非线性系统时比 EKF 有 行变量估计的方法, 更高的精度。
引言
车辆高 级 动 力 学 控 制 系 统, 如电子稳定程序 ( ESP) 要求准确实时获取关键状态变量和轮胎受力 信息, 以便控制单元作出合理干预。 经济实用的方 法是利用车辆上有限的传感器基于特定算法估计出 车辆自身的参数是不断变化的, 需要的信息。同时, 尤其在剧烈运动情况下, 载荷转移、 轮胎受力变化等 , 会引起车辆模型参数值的改变 准确辨识出关键参 数可以提高基于模型的控制系统的鲁棒性 。 [1 ] [2 ] 文献中常用滑膜观测 、 鲁棒观测 和卡尔曼 [3 ~ 6 ] 滤波 等算法估计车辆各种状态变量。 其中, 扩
车辆在运动过程中的许多参数值是不断变化 的。车辆承载状况的变化会引起质量的重新分布 , 从而影响质心位置和转动惯量等物理参数 。驾驶员 的操控以及道路、 风阻等外部激励会引起载荷和轮 胎受力状况的变化, 从而使轮胎刚度等参数发生改 变。而这些不断变化的参数对基于模型的车辆控制 系统性能有重要的影响, 本文用车辆模型时变参数 集来描述动力学模型中所有数值不断变化的车辆参 数, 以更本质地揭示车辆系统的动态特征 。 1. 2 轮胎侧偏力模型 轮胎侧偏力与路面附着状况、 载荷、 车速以及轮 胎材料等多种因素有关。文献中广泛应用的解析形
T F y1 F y2 F y3 F y4]
x s 进行联合估计, 从而得到扩展形式的状态变量 x =[ x s θ]= [ v x v y ω r a x a y F x1 F x2 F z1 F z2 F z3 F z4
T F y1 F y2 F y3 F y4 C1 C2 C3 C4 m a b I z h g]
1104 修回日期: 20110104 收稿日期: 2010* 国家高技术研究发展计划 ( 863 计划) 资助项目( 2008AA11A146 )
Email: 2201020133@ 163. com 作者简介: 解少博, 博士生, 主要从事汽车系统动力学研究,
第 12 期
解少博 等: 基于无迹卡尔曼滤波的车辆状态与参数估计
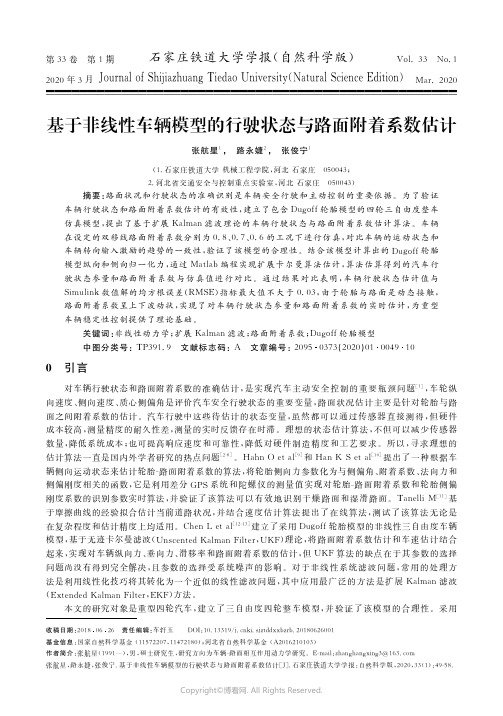
图2 Fig. 2 车辆模型 Vehicle model
由前面引入的概念可知, 本文建立的车辆模型 中的时变参数集 θ, 包括轮胎参数和车辆参数, 即 式中
T C1 C2 C3 C4 m a b I z h g] θ =[ Ci — — —轮胎模型参数 m— — —车辆质量
a、 b— — —质心到前、 后轴的距离 Iz — — —车辆横摆转动惯量 hg — — —质心高度 一般的非线性系统估计模型可以通过状态空间 包括状态方程和量测方程。 其 方程的形式来描述, 离散形式为 x( k + 1 ) = f( x( k) , u ( k ) ) + ω( k ) z( k + 1 ) = h ( x ( k + 1 ) , u( k + 1 ) ) + v ( k + 1 ) 系统变量包括状态变量 x、 测量变量 z 和输入 v 分别为系统过程噪声和量测噪声, 变量 u。 ω、 设 其协方差分别为 Q 和 R。 状态方程反映了状态变量不断更新的物理本 。 质 状态变量中的轮胎力是重要的外部激励, 动力
对应的状态方程为 x s, f ( x s, uk ) k +1 k, xk + 1 = = θk + 1 θk
[
] [
] +[η ]
ωk
k
量测方程为 z k + 1 = h ( x s, uk + 1 ) + vk + 1 θk + 1 , k +1, 式中 — —参数过程噪声 η—
状态方程的分量表达式为 为了估计时变参数 θ, 将其也作为状态变量与 · ( F x1 ( k) + F x2 ( k) ) cosδ( k) - F f ( k) - v x ( k + 1 ) = vy ( k) ω r ( k) + [ ( F y1 ( k) + F y2 ( k) ) sinδ( k) ]/ m( k) + ω1 ( k) · v y ( k + 1 ) = - vx ( k) ω r ( k) + [ ( F x1 ( k) + F x2 ( k) ) sinδ( k) + ( F y1 ( k) + F y2 ( k) ) cosδ( k) + F y3 ( k) + F y4 ( k) ]/ m( k) + ω2 ( k) · a( k) ( F y1 ( k) + F y2 ( k) ) cosδ( k) - b( k) ( F y3 ( k) + F y4 ( k) ) + ωr ( k + 1 ) = [ 0. 5 t d ( F x1 ( k) - F x2 ( k) ) cosδ( k) ]/ I z ( k) + ω3 ( k) ax ( k + 1) = [ ( F x1 ( k) + F x2 ( k) ) cosδ( k) - F f ( k) - ( F y1 ( k) + F y2 ( k) ) sinδ( k) ]/ m( k) + ω4 ( k) ( F x1 ( k) + F x2 ( k) ) sinδ( k) + ( F y1 ( k) + F y2 ( k) ) cosδ( k) + ay ( k + 1) = [ F y3 ( k) + F y4 ( k) ]/ m( k) + ω5 ( k) · F ( k + 1 ) = ω ( k) ( i = 1 , 2; j = 6, 7) j xi 0. 5 m( k) / L( k) ( gb( k) - a x ( k) h g ( k) ) m( k) a y ( k) h g ( k) b( k) / ( t d L( k) ) + ω j ( k) ( i = 1 , 2; j = 8, 9) F ( k + 1 ) = zi 0. 5 m( k) / L( k) ( gb( k) + a x ( k) h g ( k) ) m( k) a y ( k) h g ( k) b( k) / ( t d L( k) ) + ω j ( k) ( i = 3 , 4 ; j = 10 , 11 ) F yi ( k + 1 ) = F zi ( k) C i ( k) sin( D( k) arctan( E ( k) α i ( k) ) ) + ω j ( k) ( i = 1, 2, 3, 4 ; j = 12 , 13 , 14 , 15 ) 其中 arctan( ( v y ( k) + a( k) ω r ( k) ) / ( v x ( k) 0. 5 t d ω r ( k) ) ) - δ( k) ( i = 1 , 2) ( k ) = αi arctan( ( v y ( k) - b( k) ω r ( k) ) / ( v x ( k) 0. 5 t d ω r ( k) ) ) ( i = 3 , 4) 式中 vx 、 vy — — —质心纵、 侧向速度 ax 、 ay — — —质心纵、 侧向加速度 — —横摆角速度 ωr — — —车辆质心侧偏角 β— — —轮胎侧偏角 — —前轮转角 αi — δ— F x1 、 F x2 — — —前轴左、 右轮纵向力 F zi 、 F yi — — —轮胎垂直载荷、 侧偏力 参数集 θ 作为一阶高斯过程来处理, 即 2, …, 9) ( 2) θi ( k) = ηi ( k) ( i = 1 , 方程组( 1 ) 和 ( 2 ) 构成了车辆状态变量和时变 参数估计模型的状态方程。