河北工程大学805机械原理Ⅱ 13-15年真题
精品 河北工程大学机械原理Ⅱ2013-2016年考研真题-推荐
机械原理ll'
所有答案必须写在答题纸上. 做在试卷或华稿纸上无效.
、 坟空题(每空2分. 共30分)
t、t,1构具f屑心的相对运动杀件是原动件妏
讥构的自由度
2、3个倓此作平面平行运动的构件间儿付一一—-个迪度眼心. 这几个瞬心必定位
卜
上 含有6个构件的平面机构. 阳迎度瞬心共有——一个. 具
中有___售个是绝对瞬心. 有一个是相村因心
反蒙
)"‘入’
共二乙贞第止l页
了二了江1效11琏"1构 四肖 杆l机为钩原动 中件已知么=水!nm今!11[mm广=州:1lln
钊析均件j能否成为曲柄 妇蓝臼法衣朽构付了的通大侥角r尸
T锐上灰立肠,望,争少 :~划三陶,十了了J甲时冬获了昆叮叮和月叹四了
种~000Zmll、In
一今于图不为喻口圆盘凸轮机构凸轮的回转万同如图所示要求
均门详研之孔
勺互
几
刃
二
三
工翔上际川从动件日如于程h使浅f]l构的最小限力角的仁智
习l〔
.饭
共二上页第」贞
已翻渐环线标雕外啮合圆林齿轮机构其踵徽川二ll)脚”了
L丫尸
"=飞勺,川川 传与一比护=()5试什即浅山轮机构的厂 岌寸件轮的山数价珍
司直侄庆 少圈百诗、齿限圆白片私一厄
从!(卜到小辞系弓己知药=多乙=之=Zf多二吕〔不
E】}〔
共j-页第二红页
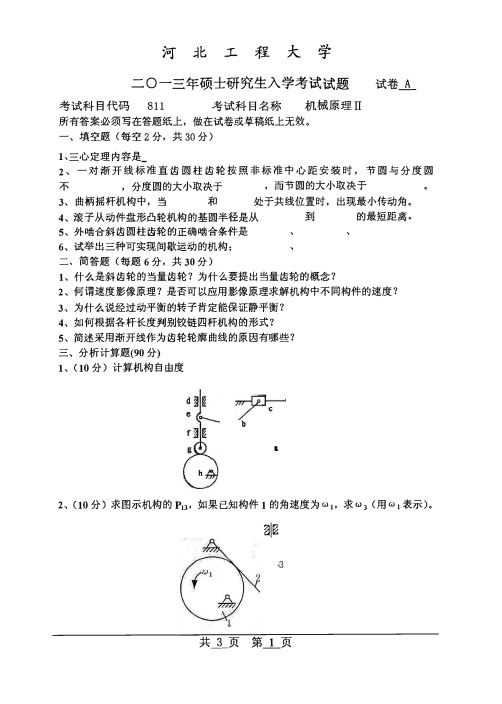
2、(10分)试求图示机构的全部瞬心,并应用瞬心法求构件了的移动速度屹的大 小和方向。图中已知数据h=50 mm,必:=600,勿,=10 rad/S。
务
。:r、必.
3、(10分).图示机构中, 各摩擦面间的摩擦角均为。,夕为生产阻力,卢 为驱
河北工程大学810机械原理Ⅱ2018年考研真题

共⊥ 页 第⊥ 页
二、分析与计算题 (共 90分 ,各 题分数见每题标注) l。 (10分 ) 分析图示机构是否存在复合铰链、局部 自由度和虚约束,计 算机构的 自由
度。
2.(1茌 分 )已 知一对标准安装的外啮合标准直齿圆柱齿轮的中心距 F196△lm,传 动 比 ∴2=3,倜 ,小 齿轮齿数 Z1=25。
(1)确 定这对齿轮的模数 m和 大齿轮齿数 Z2; ,
(10分
)铰
链
四杆机
构
的基本
形
式有
哪几种
?图
示ቤተ መጻሕፍቲ ባይዱ
四杆
机构
,CD为
机
架
,是
何种机
构
2.(10分 )简 述齿廓啮合基本定律。 3.(8分 )什 么是凸轮机构传动中的刚性冲击和柔性冲击? 4.(15分 )在 曲柄滑块机构中,当 以曲柄为原动件时,机 构是否存在急回运动?是 否 一定无死点?为 什么?什 么情况下会出现死点? 5.(12分 )速度波动的调节方法有哪些?请 说明理 由。 6.(5分 )简 述机械中不平衡惯性力的危害。
(2)计 算齿轮的分度圆直径 dl、 d2;齿 顶圆直径 d孰 、da2;齿 根圆直径 dn、 妩 和齿距 P。
共⊥ 页 第⊥ 页
3.(10分 )根 据机械系统的运动要求,需 要设计一个 曲柄摇杆机构。已知其中三个杆
件的长度分别为:丿跖=100nlm,‰ =l⒛Irlm,丿彳,=1601rlm,并 且 /夕 杆为机架 。请 问 AB杆 的长度 Z':应 为多少?
河北工业大学机械原理考研真题(2015年)

河北工业大学2015年攻读硕士学位研究生入学考试试题(B)科目名称机械原理(I)科目代码822 共3页适用专业机械工程注:所有试题答案一律写在答题纸上、答案写在试卷上、草稿纸上一律无效。
一、选择填空(共20分,每题2分。
答案一律写在答题纸上,否则无效)1、按照运动副引入的约束数,旋转副属于。
AⅢ级副 BⅣ级副 CⅤ级副 DⅥ级副2、对于曲柄摆动导杆机构,以导杆为原动件,当时为机构的死点位置。
A曲柄与导杆共线B当曲柄与机架共线C当曲柄与导杆垂直D当曲柄与机架垂直3、曲柄滑块机构,如果需要改变滑块的行程,下列哪个措施是无效的?A调整曲柄长度B调整连杆长度C改变偏距D改变曲柄转速4、凸轮设计中,一下不能通过增大凸轮基圆直径解决的问题是。
A凸轮最大压力角过大B从动件的刚性冲击C凸轮轮廓出现尖顶D平底推杆运动失真现象5、渐开线斜齿圆柱齿轮齿数为z1,螺旋角为β,基圆柱上的螺旋角为βb,则其当量齿数z v= 。
Az v=z/cos3β B z v=cos3βb C z v= cosβb D z v=z/cosβ6、对于渐开线标准齿斜齿圆柱齿轮,不发生根切的最少齿数。
A>17 B<17 C=17 D与螺旋角无关7、对于宽径比(b/D)≥0.2的不平衡刚性转子,需。
A动平衡B静平衡C先静平衡后动平衡D先动平衡后静平衡8、若凸轮从动件运动规律为等速运动规律,当凸轮转速提高一倍时,从动件的速度提高倍。
A1 B2 C4 D0.059、∑=90°的渐开线标准直齿圆锥齿轮传动的传动比i12= 。
Atgδ1 B tgδ2 C ctgδ2 Dsinδ1/ sinδ210、下列间歇运动机构中没有冲击的间歇运动机构的是。
A不完全齿轮机构B棘轮机构C槽轮机构D凸轮间歇运动机构二、问答题(共30分,每题6分,答案一律写在答题纸上,否则无效)1、机械系统方案设计过程中工作循环的作用是什么?如何绘制工作循环图?2、什么是机构的自锁?机构自锁的一般条件是什么?3、什么是正传动?正传动的特点是什么?正传动与正变位有什么区别?4、机构等效动力学模型中,等效转动惯量和等效力矩分贝依据什么原理得到?5、什么是急回运动?机构产生机会运动的条件什么?三、(12分)计算下列机构自由度,若有复合铰链、局部自由度及虚约束需指出,并说明该机构是否具有确定运动。
河北工业大学机械原理考研真题(2013年)

河北工业大学2013年攻读硕士学位研究生入学考试试题(A)科目名称机械原理(I)科目代码822 共3页适用专业机械工程注:所有试题答案一律写在答题纸上、答案写在试卷上、草稿纸上一律无效。
一、填空题:1、在盘状凸轮机构中,如果从动件运动规律不变,增大凸轮的基圆半径,则压力角。
2、当两个构件组成移动副时,其瞬心位于处。
3、用齿条工具加工标准齿轮时,齿轮分度圆与齿条刀具中线。
4、在机器的启动阶段,驱动力所做的功阻抗力所做的功。
5、一对斜齿圆柱齿轮传动的重合度由,两部分组成。
6、对于摆动导杆机构,当曲柄为主动件使,该机构的传动角值。
7、从效率观点分析机械自锁的条件是。
8、机构瞬心的数目K与机构中构件数目N的关系是。
9、棘轮机构中采用止回棘爪的作用是什么。
10、渐开线直齿圆柱外齿轮齿廓上各点的压力角是不同的,它在上的压力角为零。
二、解答题1、在曲柄摇杆机构中,当以曲柄为原动件,机构是否存在急回运动,且一定无死角?为什么?2、静平衡与动平衡的本质区别什么?在图1中,如在平面A上造一适当的平衡重量,是否能使其达到动平衡,为什么?3、什么是自锁现象?在什么情况下移动副,转动副会发生自锁?4、渐开线齿轮为什么要进行变位修正?齿轮正变位和变为前的变化?5、简述机械系统方案设计的一般步骤,并说明各设计阶段的具体内容。
三、计算分析题1、试计算图2所示机构的自由度,若有复合铰链,局部自由度和虚约束请指明在何处。
2、如图3所示轮系,已知各齿轮齿数为z1=20, z2=40, z3=15, z4=60,轮1的转速n1=120r/min,转向如图所示,试求齿轮3的转速n3的大小和方向。
3、某一机器作周期稳定运动,以主轴为等效构件,其运转周期为2π,平均角速度为ωm=40rad/s。
机器的等效转动惯量Je=1.0kgm2,其中一个运动循环内的等效阻力矩Mr如图4所示,等效驱动力矩Md为常数,如果要求机器运转速度不均匀系数δ=0.01,试求:(1)等效驱动力矩Md;(2)等效构件的最大、最小ωmax和ωmin,并指出其出现的位置;(3)装在等效构件上的飞轮转动惯量J F;4、一对渐开线外啮合直齿圆柱齿轮传动,已知m=3mm,压力角α=20°,h a*=1.0,c*=0.25,传动比i12=2,标准中心距a=90mm。
2024年河北工程大学考研初试真题-801结构力学
二○二四年硕士研究生招生考试试题(正题)
考试科目代码 801
考试科目名称 结构力学
所有答案必须写在答题纸上,做在试题纸或草稿纸上无效。
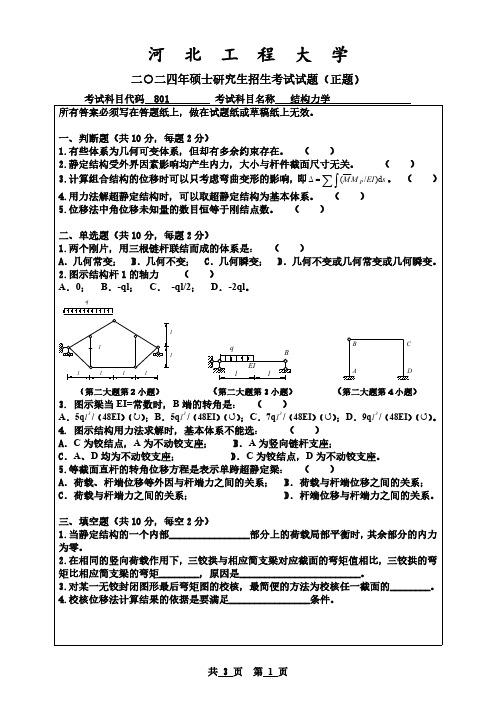
一、判断题(共 10 分,每题 2 分) 1.有些体系为几何可变体系,但却有多余约束存在。 ( ) 2.静定结构受外界因素影响均产生内力,大小与杆件截面尺寸无关。 ( )
q
l
1 l
l
l
l
l
q B
EI
l
l
B
C
A
D
(第二大题第 2 小题)
(第二大题第 3 小题)
(第二大题第 4 小题)
3. 图示梁当 EI=常数时,B 端的转角是: ( ) A.5ql3 /(48EI)();B.5ql3 /(48EI)();C.7ql3 /(48EI)();D.9ql3 /(48EI)()。
8 kN
B
1 kN/m
A
D
m
C
1m 1m
m
共3页 第3页
共3页 第1页
四、(15 分)已知图示结构 M 图。求作 Q 图。
C1
B
1
l
A 0.5
0.5 D
l
E
1
l
l
五、(15 分)作图示刚架的 M 图。
q
l
l
l
l
六、(20 分)求图示结构A、B相对竖向线位移,EI=常数,a =2m。
q
A
B
2a
aaa a
七、(15 分)利用影响线求给定荷载作用下 QC 的值。
3.计算组合结构的位移时可以只考虑弯曲变形的影响,即 (M M P /EI )ds 。 ( )
河北工程大学——机电试题
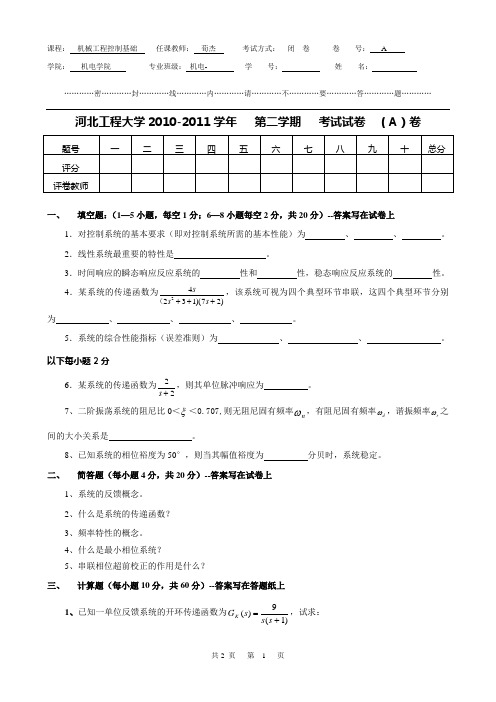
…………密…………封…………线…………内…………请…………不…………要…………答…………题…………河北工程大学2010-2011学年 第二学期 考试试卷 (A )卷一、 填空题:(1—5小题,每空1分;6—8小题每空2分,共20分)--答案写在试卷上1.对控制系统的基本要求(即对控制系统所需的基本性能)为 、 、 。
2.线性系统最重要的特性是 。
3.时间响应的瞬态响应反应系统的 性和 性,稳态响应反应系统的 性。
4.某系统的传递函数为)27)(13242+++s s s (,该系统可视为四个典型环节串联,这四个典型环节分别为 、 、 、 。
5.系统的综合性能指标(误差准则)为 、 、 。
以下每小题2分6.某系统的传递函数为22+s ,则其单位脉冲响应为 。
7、二阶振荡系统的阻尼比0<ξ<0.707,则无阻尼固有频率n ω,有阻尼固有频率d ω,谐振频率r ω之间的大小关系是 。
8、已知系统的相位裕度为50°,则当其幅值裕度为 分贝时,系统稳定。
二、 简答题(每小题4分,共20分)--答案写在试卷上1、系统的反馈概念。
2、什么是系统的传递函数?3、频率特性的概念。
4、什么是最小相位系统?5、串联相位超前校正的作用是什么?三、 计算题(每小题10分,共60分)--答案写在答题纸上1、已知一单位反馈系统的开环传递函数为)1(9)(+=s s s G K ,试求:(1)阻尼比ξ及无阻尼固有频率n ω;…………密…………封…………线…………内…………请…………不…………要…………答…………题…………(2)该系统的p P 、t M 和s t 。
(10分)2、用方框图简化方法的步骤求图示系统的传递函数。
(10分)3、单位反馈系统的闭环传递函数为nn n n nnn a s a s a s a s a s a s G ++++++=----122111...)(,分别求单位斜坡函数和单位抛物线函数输入时的无偏系数及稳态误差。
河北工业大学机械原理练习题、概念总结、简答概要、各章测试

河北工业大学机械原理练习试题卷一一、填空题(每小题2分,共20分)1、 平面运动副的最大约束数为 2 个 ,最小约束数为 1 个。
2、 当两构件组成转动副时,其相对速度瞬心在 转动副中心 处。
3、 对心曲柄滑块机构,若以连杆为机架,则该机构演化为 曲柄摇块机构 。
4、 传动角越大,则机构传力性能越 好 。
5、 凸轮机构推杆的常用运动规律中,二次多项式运动规律具有 柔性 冲击。
6、 蜗杆机构的标准参数从 中间平面 中取。
7、 常见间歇运动机构有: 棘轮机构 、 槽轮机构 等。
8、 为了减小飞轮的重量和尺寸,应将飞轮装在 高速 轴上。
9、 实现往复移动的机构有: 曲柄滑块机构 、 凸轮机构 等。
10、 外啮合平行轴斜齿轮的正确啮合条件为:212121n n n n m m ααββ==-=,, 。
二、简答题(每小题5分,共25分)1、何谓三心定理?答:三个彼此作平面运动的构件的三个瞬心必位于同一直线上 。
2、 简述机械中不平衡惯性力的危害?答:机械中的不平衡惯性力将在运动副中引起附加的动压力,这不仅会增大运动副中的摩擦和构件中的内应力,降低机械效率和使用寿命,而且会引起机械及其基础产生强迫振动。
3、 铰链四杆机构在死点位置时,推动力任意增大也不能使机构产生运动,这与机构的自锁现象是否相同?试加以说明? 答:(1)不同。
(2)铰链四杆机构的死点指:传动角=0度时,主动件通过连杆作用于从动件上的力恰好通过其回转中心,而不能使从动件转动,出现了顶死现象。
死点本质:驱动力不产生转矩。
机械自锁指:机构的机构情况分析是可以运动的,但由于摩擦的存在,却会出现无论如何增大驱动力,也无法使其运动的现象。
自锁的本质是:驱动力引起的摩擦力 大于等于 驱动力的有效分力。
4、 棘轮机构与槽轮机构均可用来实现从动轴的单向间歇转动,但在具体的使用选择上,又有什么不同?答:棘轮机构常用于速度较低和载荷不大的场合,而且棘轮转动的角度可以改变。
机械原理历年试卷汇总及答案
机械原理历年试卷汇总及答案第2章 机构的结构分析一、填空题:1、机构可能出现的独立运动数目称为机构的__________。
2、在平面机构中若引入H P 个高副将引入 个约束,而引入L P 个低副将引入 个约束,则活动构件数n 、约束数与机构自由度F 的关系是 。
3、机构具有确定运动的条件是: ;若机构自由度F>0,而原动件数<F ,则构件间的运动是 ;若机构自由度F>0,而 原动件数>F ,则各构件之间 。
4、根据运动副中两构件的接触形式不同,运动副分为__________、__________。
5、根据机构的组成原理,任何机构都可以看作是由若干个__________依次联接到原动件和机架上所组成的。
6、在平面机构中,具有两个约束的运副是__副,具有一个约束的运动副是__副。
7、两构件之间为 接触的运动副称为低副,引入一个低副将带入 个约束。
二、选择题1、当机构中原动件数目 机构自由度数目时,该机构具有确定的相对运动。
A.小于 B.等于 C.大于 D.大于或等于2、某机构为Ⅲ级机构,那么该机构应满足的充分必要条件是 。
A.含有一个原动件组;B.至少含有一个基本杆组;C.至少含有一个Ⅱ级杆组;D.至少含有一个最高级别为Ⅲ级的杆组。
3、每两个构件之间的这种可动联接,称为__________。
A.运动副;B.移动副;C. 转动副;D.高副。
4、基本杆组是自由度等于的运动链。
A.0;B.1;C.原动件数。
5、在图示4个分图中,图是Ⅲ级杆组,其余都是个Ⅱ级杆组的组合。
6、图示机构中有_______虚约束。
A 1个B 2个C 3个D 没有7、图示机构要有确定的运动,需要有_______原动件。
A 1个B 2个C 3个D 没有三、简答题:1、机构组成原理是什么?2、何谓运动副?按接触形式分有哪几种?其自由度、约束数如何?3、机构中的虚约束一般出现在哪些场合?既然虚约束对于机构的运动实际上不起约束作用,那么在实际机械中为什么又常常存在虚约束?四、分析、计算题1、计算下图所示机构的自由度,若有复合铰链、局部自由度、虚约束,请指出。