串口数据收发实验程序
串口实验实验报告

串口实验实验报告串口实验报告一、引言串口是一种常见的数据传输接口,广泛应用于电子设备之间的数据通信。
本次实验旨在通过串口通信实验,深入了解串口的工作原理和使用方法,并实现简单的数据传输。
二、实验目的1. 理解串口通信的基本原理;2. 掌握串口通信的硬件连接方式;3. 学会使用串口通信协议进行数据传输;4. 实现简单的串口通信程序。
三、实验器材1. 一台个人电脑;2. 一块开发板;3. 一条串口数据线。
四、实验步骤1. 将开发板与个人电脑通过串口数据线连接起来;2. 打开串口通信软件,并进行相应的设置;3. 在开发板上编写程序,实现数据的发送和接收;4. 在个人电脑上编写程序,实现数据的接收和显示;5. 进行数据传输实验,观察数据是否能正常传输。
五、实验结果与分析经过实验,我们成功地实现了串口通信,并能够正常地进行数据传输。
通过观察数据接收端的显示,我们可以清晰地看到发送端发送的数据被准确地接收并显示出来。
这说明我们的串口通信实验是成功的。
六、实验总结通过本次实验,我们深入了解了串口通信的原理和使用方法,并成功地实现了串口通信的数据传输。
串口通信在电子设备之间的数据传输中有着广泛的应用,掌握串口通信技术对于我们的学习和工作都具有重要的意义。
七、参考文献[1] XXXX. 串口通信原理与应用[M]. 电子工业出版社, 2010.八、致谢感谢实验中给予我们帮助和指导的老师和同学们,没有你们的支持,我们无法顺利完成本次实验。
九、附录实验中使用的程序代码如下:发送端代码:```c#include <stdio.h>#include <stdlib.h>#include <string.h>#include <Windows.h>int main(){HANDLE hSerial;DCB dcbSerialParams = { 0 };COMMTIMEOUTS timeouts = { 0 };// 打开串口hSerial = CreateFile("COM1", GENERIC_READ | GENERIC_WRITE, 0, NULL, OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL, NULL);if (hSerial == INVALID_HANDLE_VALUE){printf("无法打开串口\n");return 1;}// 配置串口参数dcbSerialParams.DCBlength = sizeof(dcbSerialParams);if (!GetCommState(hSerial, &dcbSerialParams)) {printf("无法获取串口参数\n");return 1;}dcbSerialParams.BaudRate = CBR_9600;dcbSerialParams.ByteSize = 8;dcbSerialParams.StopBits = ONESTOPBIT;dcbSerialParams.Parity = NOPARITY;if (!SetCommState(hSerial, &dcbSerialParams)) {printf("无法设置串口参数\n");return 1;}// 设置串口超时时间timeouts.ReadIntervalTimeout = 50;timeouts.ReadTotalTimeoutConstant = 50;timeouts.ReadTotalTimeoutMultiplier = 10;timeouts.WriteTotalTimeoutConstant = 50;timeouts.WriteTotalTimeoutMultiplier = 10;if (!SetCommTimeouts(hSerial, &timeouts)){printf("无法设置串口超时时间\n");return 1;}// 发送数据char data[] = "Hello, Serial!";DWORD bytesWritten;if (!WriteFile(hSerial, data, strlen(data), &bytesWritten, NULL)){printf("无法发送数据\n");return 1;}// 关闭串口CloseHandle(hSerial);return 0;}```接收端代码:```c#include <stdio.h>#include <stdlib.h>#include <string.h>#include <Windows.h>int main(){HANDLE hSerial;DCB dcbSerialParams = { 0 };COMMTIMEOUTS timeouts = { 0 };// 打开串口hSerial = CreateFile("COM1", GENERIC_READ | GENERIC_WRITE, 0, NULL, OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL, NULL);if (hSerial == INVALID_HANDLE_VALUE){printf("无法打开串口\n");return 1;}// 配置串口参数dcbSerialParams.DCBlength = sizeof(dcbSerialParams);if (!GetCommState(hSerial, &dcbSerialParams)){printf("无法获取串口参数\n");return 1;}dcbSerialParams.BaudRate = CBR_9600;dcbSerialParams.ByteSize = 8;dcbSerialParams.StopBits = ONESTOPBIT;dcbSerialParams.Parity = NOPARITY;if (!SetCommState(hSerial, &dcbSerialParams)) {printf("无法设置串口参数\n");return 1;}// 设置串口超时时间timeouts.ReadIntervalTimeout = 50;timeouts.ReadTotalTimeoutConstant = 50;timeouts.ReadTotalTimeoutMultiplier = 10;timeouts.WriteTotalTimeoutConstant = 50;timeouts.WriteTotalTimeoutMultiplier = 10;if (!SetCommTimeouts(hSerial, &timeouts)){printf("无法设置串口超时时间\n");return 1;}// 接收数据char data[100];DWORD bytesRead;if (!ReadFile(hSerial, data, sizeof(data), &bytesRead, NULL)){printf("无法接收数据\n");return 1;}// 显示接收到的数据printf("接收到的数据:%s\n", data);// 关闭串口CloseHandle(hSerial);return 0;}```十、联系方式作者:XXXEmail:XXX。
uart串口发送和接受的程序的实现原理

UART串行端口传输和接收程序工作像繁忙的邮政办公室为你的数据!它遵循UART(UART)通用同步接收器、传输器(Transmitter)协议,其中数据以特定baud速率的节奏舞蹈比特发送,开始和停止比
特引导方向。
当您想要将数据发送到世界时,程序首先会设置带有正
确baud率和其他配置的UART模块,然后它会欢快地将您的数据丢
入传输缓冲器。
从那里,UART硬件接管,刷刷你的数据并发送出来在TX针,遵循所有的规则和设置你已经规定。
这就像一个精心编程的表演,与你的数据占据中心阶段!
基本上,UART模块总是在检查RX针上的任何线程数据。
一旦它检
测到一个起始位,它开始根据指定的baud速率抓取其余位。
在获得
包括开始和停止位数在内的整个数据包后,它会保存接收缓冲中的所
有数据。
程序可以从接收缓冲器中获取数据来查看里面有什么。
处理任何潜在的错误,如框架错误或等值错误,在接收过程中可能出现,
也是非常重要的。
UART串行端口传输和接收程序的实施遵循UART协议的原则和政策,促进设备之间的数据交换。
程序精心配置了UART模块,其中包含关于baud率,数据比特,stop比特,以及等价的具体参数,并认真遵
守了规定的准则。
随后,要传输的数据被有效存储并写入UART传输缓冲器。
接收后,从接收缓冲中勤勉地检索数据,确保UART模块准确处理并存储了iing数据。
通过坚持规定的UART协议和有条不紊地
配置UART模块,程序按照既定的政策和指令,有效建立了设备间连续免疫的可靠和安全的通道。
PythonSerial串口基本操作(收发数据)

PythonSerial串⼝基本操作(收发数据)1、需要模块以及测试⼯具模块名:pyserial使⽤命令下载:python -m pip install pyserial串⼝调试⼯具:sscom5.13.1.exe2、导⼊模块import serial3、打开串⼝直接通过new⼀个Serial()的实例即可打开返回实例# encoding=utf-8import serialif __name__ == '__main__':com = serial.Serial('COM3', 115200)print com运⾏结果Serial<id=0x3518940, open=True>(port='COM3', baudrate=115200, bytesize=8, parity='N', stopbits=1, timeout=None, xonxoff=False, rtscts=False, dsrdtr=False)4、发送数据函数名write()返回值为发送成功的字节数# encoding=utf-8import serialif __name__ == '__main__':com = serial.Serial('COM3', 115200)success_bytes = com.write('This is data for test')print success_bytes运⾏结果21串⼝⼯具界⾯5、接收数据(接收固定长度数据)函数名为read(size=1)接收size单位的字符,是阻塞的,不接收到就⼀直等待接收,除⾮设置了超时时间(未设置该⽰例)# encoding=utf-8import serialif __name__ == '__main__':com = serial.Serial('COM3', 115200)data = com.read(10)print data运⾏结果123456789a串⼝⼯具界⾯6、接收数据(超时时间内⼀直接收)函数名为read(size=1)参数为接收的长度,默认为1,⼀般传⼊inWaiting(),它表⽰监测接收的字符串长度配合While可以⼀直接收# encoding=utf-8import serialimport timeif __name__ == '__main__':com = serial.Serial('COM3', 115200)over_time = 30start_time = time.time()while True:end_time = time.time()if end_time - start_time < over_time:data = com.read(com.inWaiting())data = str(data)if data != '':print data运⾏结果111222aaabbb1a2b3c4d串⼝⼯具界⾯7、封装为类# -*- encoding=utf-8 -*-import serialimport timeimport WriteLogclass COM:def __init__(self, port, baud):self.port = portself.baud = int(baud)self.open_com = Noneself.log = WriteLog.WriteLog('ITC_LOG.LOG') self.get_data_flag = Trueself.real_time_data = ''# return real time data form comdef get_real_time_data(self):return self.real_time_datadef clear_real_time_data(self):self.real_time_data = ''# set flag to receive data or notdef set_get_data_flag(self, get_data_flag):self.get_data_flag = get_data_flagdef open(self):try:self.open_com = serial.Serial(self.port, self.baud)except Exception as e:self.log.error('Open com fail:{}/{}'.format(self.port, self.baud))self.log.error('Exception:{}'.format(e))def close(self):if self.open_com is not None and self.open_com.isOpen:self.open_com.close()def send_data(self, data):if self.open_com is None:self.open()success_bytes = self.open_com.write(data.encode('UTF-8'))return success_bytesdef get_data(self, over_time=30):all_data = ''if self.open_com is None:self.open()start_time = time.time()while True:end_time = time.time()if end_time - start_time < over_time and self.get_data_flag:data = self.open_com.read(self.open_com.inWaiting())# data = self.open_com.read() # read 1 sizedata = str(data)if data != '':('Get data is:{}'.format(data))all_data = all_data + dataprint dataself.real_time_data = all_dataelse:self.set_get_data_flag(True)breakreturn all_dataif __name__ == '__main__':passcom = COM('com3', 115200)# com.open()print com.send_data('data')com.get_data(50)com.close()8、对于⼀次函数说明(百度看到,并未测试)readall():读取全部字符,是阻塞的,除⾮接收的字符串以EOF结尾或者超出缓冲区,否则函数不会返回。
C#简单串口收发程序
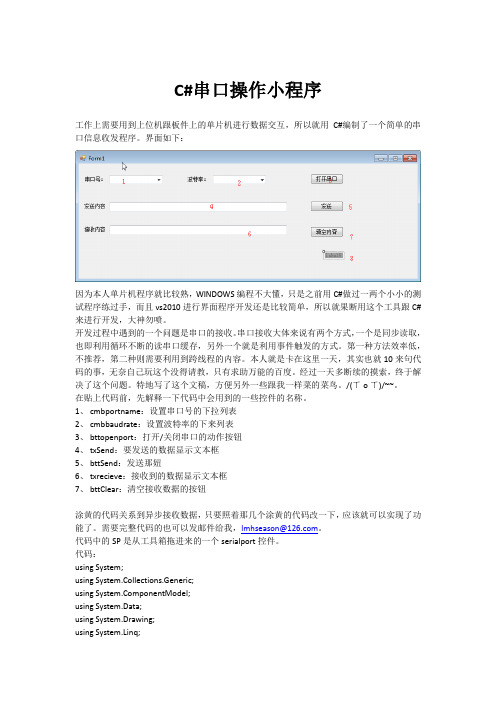
C#串口操作小程序工作上需要用到上位机跟板件上的单片机进行数据交互,所以就用C#编制了一个简单的串口信息收发程序。
界面如下:因为本人单片机程序就比较熟,WINDOWS编程不大懂,只是之前用C#做过一两个小小的测试程序练过手,而且vs2010进行界面程序开发还是比较简单,所以就果断用这个工具跟C#来进行开发,大神勿喷。
开发过程中遇到的一个问题是串口的接收。
串口接收大体来说有两个方式,一个是同步读取,也即利用循环不断的读串口缓存,另外一个就是利用事件触发的方式。
第一种方法效率低,不推荐,第二种则需要利用到跨线程的内容。
本人就是卡在这里一天,其实也就10来句代码的事,无奈自己玩这个没得请教,只有求助万能的百度。
经过一天多断续的摸索,终于解决了这个问题。
特地写了这个文稿,方便另外一些跟我一样菜的菜鸟。
/(ㄒoㄒ)/~~。
在贴上代码前,先解释一下代码中会用到的一些控件的名称。
1、cmbportname:设置串口号的下拉列表2、cmbbaudrate:设置波特率的下来列表3、bttopenport:打开/关闭串口的动作按钮4、txSend:要发送的数据显示文本框5、bttSend:发送那妞6、txrecieve:接收到的数据显示文本框7、bttClear:清空接收数据的按钮涂黄的代码关系到异步接收数据,只要照着那几个涂黄的代码改一下,应该就可以实现了功能了。
需要完整代码的也可以发邮件给我,lmhseason@。
代码中的SP是从工具箱拖进来的一个serialport控件。
代码:using System;using System.Collections.Generic;using ponentModel;using System.Data;using System.Drawing;using System.Linq;using System.Text;using System.Windows.Forms;using System.IO.Ports;namespace WindowsFormsApplication1{public partial class Form1 : Form{public Form1(){InitializeComponent();}public delegate void getstring(string dataRe);//定义委托getstring getmystring;//定义委托变量private void DoUpdate(string data){tbRecieve.Text = tbRecieve.Text + data;//数据处理,将当前数据与文本框文本合并if (label5.BackColor == Color.AliceBlue)//改变lable的颜色,提示收到数据{label5.BackColor = Color.Black;}else label5.BackColor = Color.AliceBlue;}void SP_DataReceived(object sender, SerialDataReceivedEventArgs e)//接收事件触发方法{try{string mystring = SP.ReadExisting();getmystring = new getstring(DoUpdate);Invoke(getmystring, mystring);}catch (Exception EX){MessageBox.Show(EX.Message, "出错", MessageBoxButtons.OK, MessageBoxIcon.Error);return;}}private void bttOpenPort_Click(object sender, EventArgs e)//打开串口按钮单击事件函数try{if (SP.IsOpen == true)//如果当前串口是处于打开状态,则单击按钮为关闭串口动作{cmbPortName.Enabled = true;//使能串口号获取控件cmbBaudRate.Enabled = true;//使能波特率设置控件bttSend.Enabled = false;//关闭发送数据按钮SP.Close();//关闭串口bttOpenPort.Text = "打开串口";//将打开按钮文字改为打开串口}else if (SP.IsOpen == false)//如果当前串口是处于关闭状态,则单击按钮为打开串口动作{cmbPortName.Enabled = false;//关闭串口号获取控件cmbBaudRate.Enabled = false;//关闭波特率设置控件bttOpenPort.Text = "关闭串口";//将打开按钮文字改为关闭串口SP.BaudRate = Convert.ToInt16(cmbBaudRate.SelectedItem);//设置波特率为对应combox的选择项,强制转换成int型SP.PortName = cmbPortName.SelectedItem.ToString();//串口号设置成串口号获取控件当前选择项,强制转换成stringSP.StopBits = StopBits.One;//停止位1位SP.Parity = 0;//校验,无SP.DataBits = 8;//数据位,8位SP.ReceivedBytesThreshold = 10;//接收数据事件触发门限,设为10,可根据需要设置SP.Open();//打开串口bttSend.Enabled = true;//使能发送数据按钮SP.DataReceived += new SerialDataReceivedEventHandler(SP_DataReceived);//添加数据接收事件}}catch (Exception EX){MessageBox.Show(EX.Message, "出错", MessageBoxButtons.OK, MessageBoxIcon.Error);return;}}private void bttSend_Click(object sender, EventArgs e)try{SP.Write(tbSend.Text);}catch (Exception EX){MessageBox.Show(EX.Message, "出错", MessageBoxButtons.OK, MessageBoxIcon.Error);return;}}//串口号选择combox鼠标点击事件,为了获取电脑当前有的串口号,并将其添加到combox列表中//private void bttGetPort_Click(object sender, EventArgs e){string[] Ports = SerialPort.GetPortNames();Array.Sort(Ports);cmbPortName.Items.AddRange(Ports);cmbPortName.SelectedIndex = cmbPortName.Items.Count > 0 ? 0 : -1;cmbBaudRate.SelectedIndex = cmbBaudRate.Items.IndexOf("9600");tbSend.Text = Ports[1];}private void bttClear_Click(object sender, EventArgs e)//清空数据按钮点击事件{tbRecieve.Text = string.Empty;//清空文本框文本内容}}}。
单片机串口收发程序
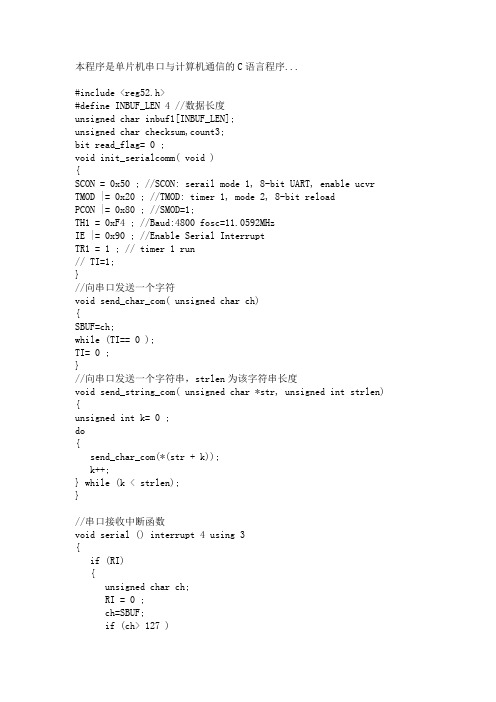
本程序是单片机串口与计算机通信的C语言程序...#include <reg52.h>#define INBUF_LEN 4 //数据长度unsigned char inbuf1[INBUF_LEN];unsigned char checksum,count3;bit read_flag= 0 ;void init_serialcomm( void ){SCON = 0x50 ; //SCON: serail mode 1, 8-bit UART, enable ucvr TMOD |= 0x20 ; //TMOD: timer 1, mode 2, 8-bit reloadPCON |= 0x80 ; //SMOD=1;TH1 = 0xF4 ; //Baud:4800 fosc=11.0592MHzIE |= 0x90 ; //Enable Serial InterruptTR1 = 1 ; // timer 1 run// TI=1;}//向串口发送一个字符void send_char_com( unsigned char ch){SBUF=ch;while (TI== 0 );TI= 0 ;}//向串口发送一个字符串,strlen为该字符串长度void send_string_com( unsigned char *str, unsigned int strlen) {unsigned int k= 0 ;do{send_char_com(*(str + k));k++;} while (k < strlen);}//串口接收中断函数void serial () interrupt 4 using 3{if (RI){unsigned char ch;RI = 0 ;ch=SBUF;if (ch> 127 ){count3= 0 ;inbuf1[count3]=ch;checksum= ch- 128 ;}else{count3++;inbuf1[count3]=ch;checksum ^= ch;if ( (count3==(INBUF_LEN- 1 )) && (!checksum) ){read_flag= 1 ; //如果串口接收的数据达到INBUF_LEN个,且校验没错,//就置位取数标志}}}}main(){init_serialcomm(); //初始化串口while ( 1 ){if (read_flag) //如果取数标志已置位,就将读到的数从串口发出{read_flag= 0 ; //取数标志清0send_string_com(inbuf1,INBUF_LEN);}}}。
串行口自发自收实验 单片机程序

图3波形脉冲宽度测试原理
评分表
序号
评分项目
分值
评分
备注
1
按键的读取
20
1、电路图的理解
2、读键准确性
2
静态显示
20
1、电路图的理解
2、显示的准确性
3、显示数据的处理
3
串行口
20
1、串行口的设置
2、串行口的发送
3、串行口的接收
#include<reg51.h>
unsigned char code led_code[]={0x03,0x9f,0x25,0x0d,0x99,0x49,0x41,0x1f,0x01,0x09,
{
unsigned int i;
unsigned char j;
for(i=x;i>0; i--)
for(j=110;j>0;j--);}void mai Nhomakorabea(void)
{
TMOD=0x20;
SCON=0x50;
PCON=0x00;
TH1=0xfd;
TL1=0xfd;
EA=1;
ES=1;
TR1=1;
dis_buf[0]=led_code[16];
串行口自发自收实验
实验内容:
根据电路如图1所示编写程序。实现当键1按下,单片机串行口应用方式1连续向外发送“0、1、2、3”四字节数据,通过串行口单片机自发自收改信号,将接受的数据显示出来;当键2按下,单片机串行口应用方式1连续向外发送“4、5、6、7”四字节数据,通过串行口单片机自发自收改信号,将接受的数据显示出来;当键3按下单片机串行口应用方式1连续向外发送“8、9、a、b”四字节数据,通过串行口单片机自发自收改信号,将接受的数据显示出来;当键4按下,单片机串行口应用方式1连续向外发送“c、d、e、f”四字节数据,通过串行口单片机自发自收改信号,将接受的数据显示出来。
STM32串口接收、发送数据实验-程序代码分析

STM32串⼝接收、发送数据实验-程序代码分析串⼝通信实验Printf⽀持printf向串⼝发送⼀些字符串数据。
如果使⽤串⼝2,可以修改while((USART1->SR&0X40)==0);和USART1->DR = (u8) ch; 中的USART1为USART2.//加⼊以下代码,⽀持printf函数,⽽不需要选择use MicroLIB#if 1#pragma import(__use_no_semihosting)//解决HAL库使⽤时,某些情况可能报错的bugint _ttywrch(int ch){ch=ch;return ch;}//标准库需要的⽀持函数struct __FILE{int handle;/* Whatever you require here. If the only file you are using is *//* standard output using printf() for debugging, no file handling *//* is required. */};/* FILE is typedef’ d in stdio.h. */FILE __stdout;//定义_sys_exit()以避免使⽤半主机模式void _sys_exit(int x){x = x;}//重定义fputc函数int fputc(int ch, FILE *f){while((USART1->SR&0X40)==0);//循环发送,直到发送完毕USART1->DR = (u8) ch;return ch;}#endif实验现象从电脑串⼝助⼿发送长度为200以内任意长度的字符串给STM32串⼝1(字符串以回车换⾏标识结束),STM32接收到字符串之后,⼀次性通过串⼝1把所有数据返回给电脑。
实现过程把每个接收到的数据保存在⼀个程序定义的Buffer数组中(数组长度为200),同时把接收到的数据个数保存在定义的变量中。
stm32串口实验:stm32通过usart1进行串口收发,PA9(TX)和PA10(RX)

stm32串⼝实验:stm32通过usart1进⾏串⼝收发,PA9(TX)和PA10(RX)这是stm32开发中⽐较简单的实验,原理是通过串⼝助⼿发送信息,stm32接收到信息以后在串⼝助⼿中打印相同的内容。
这⾥直接分享keil5⼯程代码,是在⼯程模板的基础上移植和修改了正点原⼦的串⼝代码(如果失效的话可以在下⽅评论留下邮箱,我看到会给你发⼀份)顺便把usart.c和usart.h还有mian.c中的代码复制到下⾯,⼩伙伴可以直接移植到⾃⼰的⼯程中实现的效果也在下⾯放上串⼝助⼿中显⽰的图⽚usart.c1 #include "sys.h"2 #include "usart.h"345//STM32F103核⼼板例程6//库函数版本例程7/********** 出品 ********/8910//////////////////////////////////////////////////////////////////////////////////11//如果使⽤ucos,则包括下⾯的头⽂件即可.12#if SYSTEM_SUPPORT_UCOS13 #include "includes.h"//ucos 使⽤14#endif15//////////////////////////////////////////////////////////////////////////////////16//STM32开发板17//串⼝1初始化1819//////////////////////////////////////////////////////////////////////////////////202122//////////////////////////////////////////////////////////////////23//加⼊以下代码,⽀持printf函数,⽽不需要选择use MicroLIB24#if 125#pragma import(__use_no_semihosting)26//标准库需要的⽀持函数27struct __FILE28 {29int handle;3031 };3233 FILE __stdout;34//定义_sys_exit()以避免使⽤半主机模式35void _sys_exit(int x)36 {37 x = x;38 }39//重定义fputc函数40int fputc(int ch, FILE *f)41 {42while((USART1->SR&0X40)==0);//循环发送,直到发送完毕43 USART1->DR = (u8) ch;44return ch;45 }46#endif4748/*使⽤microLib的⽅法*/49/*50int fputc(int ch, FILE *f)51{52 USART_SendData(USART1, (uint8_t) ch);5354 while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET) {}5556 return ch;57}58int GetKey (void) {5960 while (!(USART1->SR & USART_FLAG_RXNE));6162 return ((int)(USART1->DR & 0x1FF));63}64*/6566#if EN_USART1_RX //如果使能了接收67//串⼝1中断服务程序68//注意,读取USARTx->SR能避免莫名其妙的错误69 u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最⼤USART_REC_LEN个字节.70//接收状态71//bit15,接收完成标志72//bit14,接收到0x0d73//bit13~0,接收到的有效字节数⽬74 u16 USART_RX_STA=0; //接收状态标记7576void uart_init(u32 bound){77//GPIO端⼝设置78 GPIO_InitTypeDef GPIO_InitStructure;79 USART_InitTypeDef USART_InitStructure;80 NVIC_InitTypeDef NVIC_InitStructure;8182 RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟 83//USART1_TX PA.984 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.985 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;86 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复⽤推挽输出87 GPIO_Init(GPIOA, &GPIO_InitStructure);8889//USART1_RX PA.1090 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;91 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输⼊92 GPIO_Init(GPIOA, &GPIO_InitStructure);9394//Usart1 NVIC 配置9596 NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;97 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级398 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //⼦优先级399 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能100 NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器101102//USART 初始化设置103104 USART_ART_BaudRate = bound;//⼀般设置为9600;105 USART_ART_WordLength = USART_WordLength_8b;//字长为8位数据格式106 USART_ART_StopBits = USART_StopBits_1;//⼀个停⽌位107 USART_ART_Parity = USART_Parity_No;//⽆奇偶校验位108 USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None;//⽆硬件数据流控制109 USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式110111 USART_Init(USART1, &USART_InitStructure); //初始化串⼝112 USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启中断113 USART_Cmd(USART1, ENABLE); //使能串⼝114115 }116117118119void USART1_IRQHandler(void) //串⼝1中断服务程序120 {121 u8 Res;122 #ifdef OS_TICKS_PER_SEC //如果时钟节拍数定义了,说明要使⽤ucosII了.123 OSIntEnter();124#endif125if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)126 {127 Res =USART_ReceiveData(USART1);//(USART1->DR); //读取接收到的数据128129if((USART_RX_STA&0x8000)==0)//接收未完成130 {131if(USART_RX_STA&0x4000)//接收到了0x0d132 {133if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始134else USART_RX_STA|=0x8000; //接收完成了135 }136else//还没收到0X0D137 {138if(Res==0x0d)USART_RX_STA|=0x4000;139else140 {141 USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;142 USART_RX_STA++;143if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收144 }145 }146 }147 }148 #ifdef OS_TICKS_PER_SEC //如果时钟节拍数定义了,说明要使⽤ucosII了.149 OSIntExit();150#endif151 }152#endifusart.h1 #ifndef __USART_H2#define __USART_H3 #include "stdio.h"4 #include "sys.h"56//STM32F103核⼼板例程7//库函数版本例程8/********** 出品 ********/910//////////////////////////////////////////////////////////////////////////////////11//STM32开发板12//串⼝1初始化1314#define USART_REC_LEN 200 //定义最⼤接收字节数 20015#define EN_USART1_RX 1 //使能(1)/禁⽌(0)串⼝1接收1617extern u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最⼤USART_REC_LEN个字节.末字节为换⾏符18extern u16 USART_RX_STA; //接收状态标记19//如果想串⼝中断接收,请不要注释以下宏定义20void uart_init(u32 bound);21#endifmain.c1 #include "sys.h"2 #include "delay.h"3 #include "usart.h"45 uint8_t t;6 uint8_t len;7 uint16_t times=0;89int main(void)10 {11 delay_init(); //延时函数初始化12 uart_init(115200); //串⼝初始化为1152001314while(1)15 {16if(USART_RX_STA&0x8000) //USART_RX_STA第⼗六位为1则括号内为1,表⽰接收完数据17 {18 len=USART_RX_STA&0x3fff;//得到此次接收到的数据长度19 printf("\r\n您发送的消息为:\r\n\r\n");20for(t=0;t<len;t++)21 {22 USART_SendData(USART1, USART_RX_BUF[t]);//向串⼝1发送数据23while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);//等待发送结束24 }25 printf("\r\n\r\n");//插⼊换⾏26 USART_RX_STA=0;27 }else28 {29 times++;30if(times%500==0)printf("请输⼊数据,以回车键结束\n");31 delay_ms(10);32 }33 }34 }串⼝实验效果图:未发送时发送数据时:祝⼩伙伴们2020加油!。