同济理论力学有关自由度
《工程力学Ⅰ》课程教学大纲
《工程力学Ⅰ》课程教学大纲课程编号:125111 学分: 4 (4学时/周) 总学时:68大纲执笔人:陈洁大纲审核人:王斌耀一、课程性质与目的工程力学(Ⅰ)(包括静力学、材料力学两部分)是土木工程专业的一门重要的技术基础课,它是各门后续课程的基础,并在许多工程技术领域中有着广泛的应用。
本课程的目的是使学生掌握静力学中一般力系的简化与平衡问题的分析介绍方法;掌握材料力学中构件在拉、压、剪切、扭转和弯曲时的强度与刚度问题的分析计算方法,构件在组合变形时的强度与刚度问题的分析计算方法,以及构件在受压时稳定性问题的分析计算方法等;掌握材料的基本力学性能和基本的材料力学实验方法;初步学会应用基本概念、基本理论和基本分析方法去分析问题和解决问题,为学习一系列后继课程打好必要的基础。
同时结合本课程的特点培养学生分析、解决工程实际问题的能力,提高学生的综合素质。
二、课程基本要求1、掌握力的概念、力的投影和力矩的计算;2、掌握力系简化的方法和一般的简化结果;3、掌握刚体静力学的平衡条件和平衡方程;4、对材料力学的基本概念和基本的分析方法有明确的认识。
5、具有将简单受力杆件简化为力学简图的初步能力,具有力学建模的初步概念与能力。
6、能熟练地做出杆件在基本变形下的内力图、计算其应力和位移、并进行强度和刚度计算。
7、对应力状态理论和强度理论有明确的认识,并能将其应用于组合变形下杆件的强度计算。
8、理解掌握简单超静定问题的求解方法。
9、对能量法的有关基本原理有明确认识,并熟练地掌握一种计算位移的能量方法。
10、对压杆的稳定性概念有明确的认识,能熟练计算轴向受压杆的临界载荷与临界应力,并进行稳定性校核等计算。
11、掌握质点系的质心、刚体的转动惯量、惯性积、惯性主轴和惯性积的平行移轴公式;掌握截面的静矩,形心的位置,惯性矩和惯性积及它们的平行移轴公式,转轴公式。
组合截面的惯性矩、惯性积计算,截面的形心主惯性轴和形心主惯性矩的计算11、对于常用材料在常温下的基本力学性能及其测试方法有初步认识。
K02第三章平面机构的运动简图及其自由度精品文档
同济大学机械学院
一、 平面机构自由度的计算公式
作平面运动的刚体在空间的位置需
要三个独立的参数(x,y, θ ) y
才能唯一确定。
单个自由构件的自由度为 3
F=3
θ (x , y)
x
同济大学机械学院
经运动副相联后,构件自由度会有变化:
y
y
y
2
x
θ1 x
12
x
1
2
S
R=2, F=1
R=2, F=1
同济大学机械学院
一般构件的表示方法
两副构件 三副构件
同济大学机械学院
注意事项:
画构件时应撇开构件的实际外形,而只考虑运动副 的性质。 3. 运动链 运动链-两个以上的构件通过运动副 的联接而构成的系统。闭式链、开式链
同济大学机械学院
4. 机构
机构是由若干构件经运动副联接而成的,很显然,机构归属于运动链,那么, 运动链在什么条件下就能称为机构呢?即各部分运动确定。分别用四杆机构 和五杆机构模型演示得出如下结论:
同济大学机械学院
连杆盖
2.运动副 定义:运动副--两个构件直接接触组成的仍能产 生某些相对运动的联接。
a)两个构件、b) 直接接触、c) 有相对运动 三个条件,缺一不可
运动副元素-直接接触的部分(点、线、面) 例如:滚子凸轮、齿轮齿廓、活塞与缸套等。
同济大学机械学院
运动副的分类: 1)按引入的约束数分有: I级副、II级副、III级副、IV级副、V级副。
机构的自由度。
解:n= 4, PL= 6, PH=0
B 2E
C
F=3n - 2PL - PH
1
4
3
同济 汽车振动 机械振动 PPT第三章+多自由度系..(2)
所施加的一组外力数值上正是质量矩阵M的第j 列
结论:
质量矩阵M 中的元素mij是使系统仅在第j 个坐 标上产生单位加速度而相应于第i个坐标上 所需 施加的力。 mij又称为质量(惯性)影响系数。 根据它的物理意义可以直接写出质量矩阵M。
惯性影响系数mij的定义为:
使系统的第j个坐标产生单位加速度,而其它 的坐标加速度为零时,在第i个坐标上所需施加的 作用力的大小。 质量矩阵一般亦为对称矩阵。 注意: 1.在某坐标上施加加速度时,质量的位移为0,因 此与弹性力无关; 2.mij为与惯性力平衡的力。
假设系统受到外力作用的瞬时,只产生加速度而不产 生任何位移即
MX P(t )
假设作用于系统的是这样一组外力,它们使系统只 在第j 个坐标上产生单位加速度,而在其他各个坐标 上不产生加速度。
m11 m21 P MX mn1 m1 j m2 j mnj 0 m1n m1 j m m2 n 2j 1 mnn 0 mnj
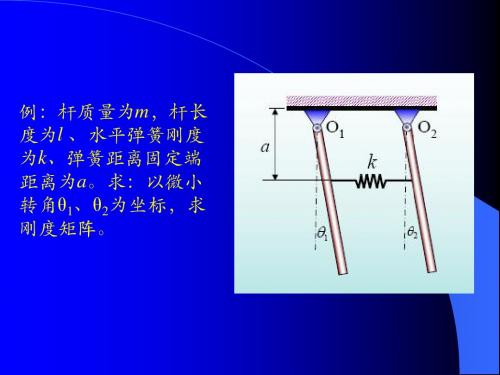
me m M 2 me I C me
系统振动微分方程为:
me D k1 k2 x k2 a2 k1a1 xD 0 m me I me2 k a k a k a 2 k a 2 0 C 2 2 D D 2 2 1 1 1 1
x k1n 01 pp1 t 1 t 0 p t t p k2 n x2 2 2 x n t p knn 0n pn t
1 mgl ka 2 2 ka 2
理论力学第六章 点的合成运动 [同济大学]
![理论力学第六章 点的合成运动 [同济大学]](https://img.taocdn.com/s3/m/63fd0a4dbe1e650e53ea9909.png)
解: 从例6-2已知得: 1 =
vr r 3 , 2
ω 4
O
解: 从上例已知得: 1 =
r
M
ω 4
va
A
aaτ =0 ,
3 , 4
aan=2r aen=
ωr 8
x’
2
ac 21vr 2 r
va
30°
3 1 1/ s2 8
2
动点取A,
va v A
ar
dvr d 2 x ' ' d 2 y ' ' d 2 z ' ' 2 r 2 j 2 k dt dt dt dt
dx ' di ' dy ' dj' dz ' dk ' dt dt dt dt dt dt
ar ω vr
a a ae a r ac; ac= 2vr
ve
a n a ae a rn a rτ
矢量
1.瞬时状态; 2.可解两个未知量 (大小,方向)。
例6-5 曲柄滑道机构,OA=01A=r=10cm, =30°,=4, 求: 转到30°时直杆的加速度a。 va vr 动点取A; 绝对:圆周; ve 解:相对:圆周;牵连:直线。 [速度] =
a a ae a r ac; aa a an ae aen ar arn ac;
例6-8 曲柄绕O转动,並通过滑块M带动滑槽绕O′摆动, ’ y 求摆动到30°时的角加速度1。
例6-9 将例6-8滑槽改变为图示牛头刨床机构,MA=2r, 求:刨床刨刀的速度,加速度。
vr
dv e dω dr r ω dt dt dt α r ω v e ω v r ae ω v r
同济大学理论力学 导学16虚位移原理

理论力学导学章虚位移原理第1616章第16章虚位移原理目录1. 内容提要... ... ... ... ... ... ... ... ... ... ... ... (3)2. 基本要求... ... ... ... ... ... ... ... ... ... ... ... (7)3. 典型例题... ... ... ... ... ... ... ... ... ... ... ... (8)4. 补充习题... ... ... ... ... ... ... ... ... ... ... ... (36)1.内容提要1)基本概念虚位移原理是用动力学的解题方法来研究静力学的平衡问题。
(1) 虚位移的概念及计算虚位移不是经过d t时间所发生的真实小位移,而是假想的、约束所允许的微小位移。
(2) 虚位移的计算方法大致可以分为以下两种:a. 虚速度法当时间“冻结”后,虚位移与速度具有相同的几何关系,所以可以利用运动学中研究速度的各种方法。
b. 解析法当质点系的广义坐标一旦确定,就将各质点的坐标表示为广义坐标的函数,然后通过对各质点坐标的变分,得到各质点的虚位移表示广义坐标的变更的关系式。
但必须注意,在应用解析法解题时,质点系中每一个质点都应处于一般位置。
0δ1=⋅∑=i ni i r F r r 0)δδδ(1=++∑=ni i iz i iy i ix z F y F x F (3)虚位移原理的应用几何形式对结构和机构都是适合的,但对机构,用解析法往往比较方便。
解析形式不能应用于处于特殊位置的机构。
应用虚位移原理解题时,对自由度为零的结构,根据题所要求的未知量,一般每次解除一个约束,使系统只有一个自由度,然后应用虚位移原理的几何形式(虚速度法)求解;对处于一般位置的机构,则可应用虚位移的解析形式求解。
虚位移原理的两种表达形式几何形式解析形式广义坐标形式的虚位移原理广义力以广义坐标表示的虚位移就是广义虚位移,与广义虚位移乘积后可以构成虚功的主动力就是广义力。
同济结构力学课件第二章-平面体系的机动分析
07:56
第二章 平面体系的机动分析
§2-1 基本概念:
3 杆系的机动分析: 机动分析就是判断一个杆系是否是几何不变体系, 同时还要研究几何不变体系的组成规律。
机动分析的目的:
1、判别某一体系是否为几何不变,从而决定它能否作为结 构。 2、区别静定结构、超静定结构,从而选定相应计算方法。 3、搞清结构各部分间的相互关系,以决定合理的计算顺序。
W 3 3m 2h 3
第二章 平面体系的机动分析
§2-2 平面体系的自由度计算
例1 .
1 ①
2
②
3
解:
07:56
w 3m ( 2h r ) 3 3 (2 2 4) 1
m 3, h 2, r 4
第二章 平面体系的机动分析
§2-2 平面体系的自由度计算 例2. 不与基础相连
o y
x
x
或由若干杆件组成的几何不变体系)。
A(x,y)
y x
2. 刚片的自由度——3 07:56
o
第二章 平面体系的机动分析
§2-2 平面体系的自由度计算
二、平面刚片系的自由度 1.平面刚片系的组成:
简单铰 ⑴各刚片间用铰相连 复铰 ⑵各刚片用一定的支杆 (sup portLink )与基础相连。
w 26 9 3
W=0 几何不变
0
07:56
第二章 平面体系的机动分析
§2-2平面体系的自由度计算
5 自由度的讨论:
⑴ W>0 几何可变
⑵ W=0
具有成为几何不 变所需的最少联系
07:56
第二章 平面体系的机动分析
理论力学---第十五章 单自由度系的振动 [同济大学]
![理论力学---第十五章 单自由度系的振动 [同济大学]](https://img.taocdn.com/s3/m/f12734254b73f242336c5f62.png)
d2x k x 0, dt 2 m
d2x 2 n x 0, dt 2
n2
k , m
F
δs mg k
k
xO
n
v0
s
x mg x
y
A xo (
2π
2
n
v0
)2 ,
ωx α arctan n 0 v0
解 : x c1 cos nt c2 sin nt
第十五章 单自由度系统的振动 §15-1 有阻尼自由振动
1.弹簧力 2.静伸长 3.阻尼力 4. 4 方程
m
Fk k ( s x ),
δs mg k
c Fc
k F
s
x
y
Fc cv
d2 x dx k(x δs ) c mg kx c dx dt 2 dt dt 2 k c x dx 2 2 n , 2n , d 2 2n ωn x0 m m dt dt
m1 m
d T 0, dt d T , m x dt x
V k 2b 2 k1 ( x a )(a )
x0=0 (碰撞时位移、重力不计)
2 ωn
(m1 m) kx 0, x
x A sin(n t )
Ae nTn Ai 1
4 π 2 A2c 2 P 2 4 π 2 2 , T2 g2 Td
c
2 πP 2 2 Td T 2 gATTd
如:=0.05, 10次后振幅仅原4.3%。
Td T
d 2 x 2 Ac dx 2 ωn x0 dt 2 m dt
1
1. 无阻尼的自由振动
同济大学 理论力学 孙杰 第一章 基本概念与基本理论

i j k z Fz y Fy
B
F
A
y
r
O
M x 0 Fx
矩阵计算
x
( yFz zF y )i ( zFx xFz ) j ( xFy yFx )k
MOy = zFx - xFz MOz矢量与投影关系 = xFy - yFx
Fx
x
q
F
y `
Fxy
Fy
平面内投影
§1-5 力矩的概念
一、力对点的矩
度量力使物体绕某点转动效应的物理量
1、在平面内
O:力矩中心 矩心 d:力臂
力矩中心 不一定是 转动中心
力矩平面
力矩: MO (F )= ±Fd
正负号
+ _
单位:kN· m
2、在空间内
2、在空间内 转动效应:力矩平面 等 z M0 r F 矢量表示 M (F ) r F O 力矩矢 r xi yj zk ,
§1-1 力:物体间相互的机械作用
1、作用效应:a.运动效应 b.变形效应 2、力的三要素:
运动效应
大小 、方向(方位与指向) 、作用点。
力的表示
定位矢量
力的作用线 刚体静力学 变形效应
F
A
§1-2 力学模型 :质点、质点系、刚体
质点:只计及质量 而不计大小和形状的物体
质点系:相互联系的有限或无限多的质点的总称
F
A
B
力对刚体作用的三要素:大小、方向、作用线
推论2:三力平衡汇交定理
设三个力不平行,且有两个力相交于一点,若力系平衡。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.约束方程
(1) 坐标
确定一个自由质点在空间的位置需要三个独立参数, 这些参数或代表长度或代表角度,统称坐标。
(2)位形
对于由n个质点组成的自由质点系,则需要3n个独立 坐标,这3n个的坐标集合称为质点系的位形。
(3)约束方程
约束可以通过联系坐标、坐标的时间导数以及时间t 之间的关系的数学方程组加以描述,这些数学方程组称之 为约束方程。
约束方程中不含: 不显含时间t时为定常约束, 反之为 非定常约束。
约束方程中以等号表示时:为双面(固执)约束, 反之 为单面(非固执)约束。
几何约束
单摆:
x2 y2 z2 l2
曲面上的质点: f (x, y, z) 0
运动约束
纯滚动的圆轮:
yC r ——几何约束
x r 0 ——运动约束
x0 ,
A
k
yA 0
xB xA l cos
yB l sin
广义坐标
q1 x; q2
B 自由度
k 2
五总结
(1)检查刚体(质点)数目 n。
(2)检查各刚体的运动形式。 (3)列写出约束方程。 (4)计算自由度,确定广义坐标。
(a)空间刚体系 k=6n-s,空间质点系 k=3n-s (b)平面刚体系 k=3n-s,平面质点系 k=2n-s
O z
x
y
l
A
z M
y x
y
C
vC
x
定常几何约束
单摆: x2 y2 z2 l 2
非定常几何约束
x2 y2 z2 l0 vt 2
O z
x
y
l
A
v
双面约束:在约束方程中用严格的 等号表示的约束。
OA为刚性杆: x2 y2 z2 l2
单面约束:在约束方程含有不等号 表示的约束。
O
3. 约束分类与约束方程一般形式
n个质点组成的质点系,约束方程的一般形式为:
fr (x1, y1, z1,, xn , yn , zn; x1, y1, z1,, xn , yn , zn;t) 0
(r=1,…,s)
约束方程的个数为:s
约束方程的特例:
约束方程中不含: x1, y1, z1,, xn , yn , zn; 时为几何约束, 反之为运动约束。
z x
y
l
A
单摆
OA为柔绳: x2 y2 z2 l2
完 1.位移约束----全部几何约束
整
约
束
2.运动约束可积分----纯滚动的圆轮;
非 完 整 运动约束不可积分----如碰撞系统, 摩擦系统等. 约 束
静力学问题中的约束都是定常几何约束。
本教材动力学研究:定常、双面、完整约束。
三、广义坐标、自由度 1.基本概念 自由度:唯一确定质点系空间位置的独立参变量个数
自由度数为:k 3n s 3n (3n>46) 6
3.自由刚体的广义坐标
基点的直角坐标 x0, y0, z0 和欧拉角 ,,
或卡尔丹角 ,, 组成的6个独立参变量就是 自由刚体的广义坐标。
它们被用于描述刚体的位形。
4.受约束刚体的自由度
设刚体数为m,则 k = 6m -S
4、约束刚体的自由度与广义坐标
约 束刚体的自由度与广义坐标根据其运动 形式不同有所减小,下表给出刚体在不同的运 动形式时的广义坐标数。
刚体约束情况
刚体上一轴被约束 (定轴转动)
刚体上一点被约束 (定点运动)
刚体被限制作平面平行运 动(自由的平面运动)
刚体被限制作平行移动 (平移)
自由度 1 3 3 3
广义坐标
,,
x0 , y0 ,
约束、自由度与广义坐标
一、问题的提出 物体系统根据其与外界环境之间的关系,可分成自由系
统与非自由系统。 研究约束质点系的力学问题,必须阐明约束,自由度与
广义坐标的概念。
二、约束 1.约束概念 约束就是限制物体任意运动的条件。
刚体静力学研究约束, 是探究约束的原因-------约束力
运动学研究约束,是探究约束的结果-------运动的限制
ri ri (q1, q2 qk , t)
i=1,2,······ n
2.自由刚体的自由度
最简单的刚体由4个质点用6根刚杆组成几何不变体 (形如四面体),则自由刚体的自由度为:
k 3 4(质点数) ( 6 刚杆数) 6
此后每增加一个质点就增加3根刚杆。
连接质点的刚杆数为:3n 6
每一根刚杆相当于一个约束,所以约束数为: s 3n 6
自由度数定义为质点系解除约束时的坐标数减去约束方程数
空间质点: k 3n s,
平面质点: k 2n s,
广义坐标: 用以确定质点系位置的独立参变量
与自由度相对应的独立坐标就是广义坐标 一般地:n个质点,自由度为k, 取广义坐标: q1 ,q2 qk
xi xi (q1, q2 qk ,t) yi yi (q1, q2...... qk , t) zi zi (q1, q2 qk , t)