扩张状态观测器构成的自抗扰控制器
自抗扰算法介绍报告
自抗扰算法(ADRC )介绍报告自抗扰控制器自PID 控制器演变过来,采取了PID 误差反馈控制的核心理念。
传统PID 控制直接引取输出于参考输入做差作为控制信号,导致出现响应快速性与超调性的矛盾出现。
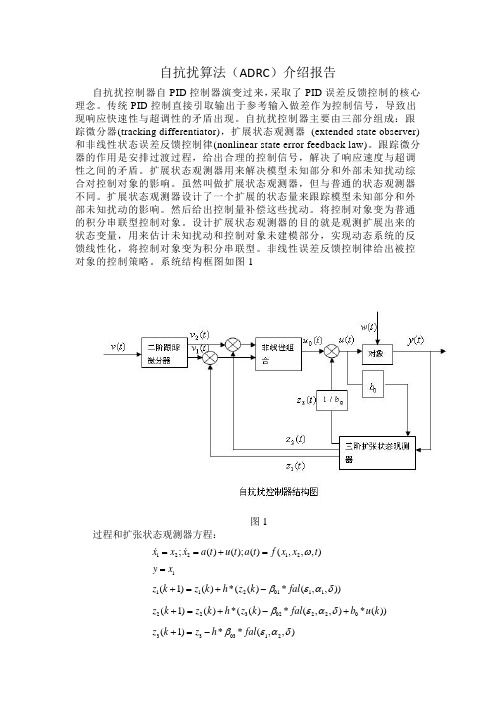
自抗扰控制器主要由三部分组成:跟踪微分器(tracking differentiator),扩展状态观测器 (extended state observer) 和非线性状态误差反馈控制律(nonlinear state error feedback law)。
跟踪微分器的作用是安排过渡过程,给出合理的控制信号,解决了响应速度与超调性之间的矛盾。
扩展状态观测器用来解决模型未知部分和外部未知扰动综合对控制对象的影响。
虽然叫做扩展状态观测器,但与普通的状态观测器不同。
扩展状态观测器设计了一个扩展的状态量来跟踪模型未知部分和外部未知扰动的影响。
然后给出控制量补偿这些扰动。
将控制对象变为普通的积分串联型控制对象。
设计扩展状态观测器的目的就是观测扩展出来的状态变量,用来估计未知扰动和控制对象未建模部分,实现动态系统的反馈线性化,将控制对象变为积分串联型。
非线性误差反馈控制律给出被控对象的控制策略。
系统结构框图如图1图1过程和扩张状态观测器方程:1y x =22302220(1)()*(()*(,,)*())z k z k h z k fal b u k βεαδ+=+-+1120111(1)()*(()*(,,))z k z k h z k fal βεαδ+=+-12212;()();()(,,,)x x x a t u t a t f x x t ω==+=330312(1)**(,,)z k z h fal βεαδ+=-非线性控制策略方程:二阶微分控制器:112(1)()*()v k v k h v k +=+2212(1)()*(()(),(),,)v k v k h fhan v k v k v k r h +=+-其中,h 为积分步长,r 为跟踪算子。
自抗扰控制器参数整定方法的研究
自抗扰控制器参数整定方法的研究自抗扰控制器(Active Disturbance Rejection Controller,ADRC)是一种具有鲁棒性的控制方法,它在各个领域得到了广泛的应用。
然而,自抗扰控制器的性能很大程度上取决于参数的整定。
因此,研究自抗扰控制器参数整定方法具有重要的实际意义。
自抗扰控制器参数整定方法的研究发展迅速,现有的研究主要集中在理论分析和实验设计两个方面。
在理论分析方面,研究者们主要从扰动的估计和控制器设计两个方面展开研究。
在实验设计方面,则主要控制器的实现及其对不同系统的应用。
然而,现有的研究还存在一些问题,如参数整定缺乏系统性,实验验证不够充分等。
本文从理论分析和实验设计两个方面研究自抗扰控制器参数整定方法。
基于自抗扰控制器的原理,建立系统的数学模型。
然后,采用遗传算法对控制器参数进行全局搜索和优化,以实现最佳控制效果。
通过实验验证所提出方法的可行性和优越性。
通过实验验证了所提出方法的可行性和优越性。
实验结果表明,本文所提出的参数整定方法能够有效提高自抗扰控制器的性能,减小系统的稳态误差和超调量。
同时,对比实验也证明了本文所提出方法的有效性。
本文研究了自抗扰控制器参数整定方法,提出了一种基于遗传算法的全局优化方法。
通过理论分析和实验验证,证明了所提出方法的有效性和优越性。
然而,本文的研究仍存在一些不足之处,如未考虑非线性系统、控制器的优化算法还有待进一步改进等。
未来的研究方向可以包括拓展该方法在复杂系统和非线性系统中的应用,优化控制器的设计以及发展更加智能化的优化算法。
在复杂工业生产过程中,系统的干扰和不确定性常常成为制约控制系统性能的主要因素。
为了提高系统的抗干扰能力和鲁棒性,自抗扰控制(Active Disturbance Rejection Control,ADRC)方法应运而生。
同时,为了使控制系统达到最佳性能,对控制器参数进行合理整定也显得尤为重要。
本文将围绕自抗扰控制及控制器参数整定方法展开研究,旨在提高控制系统的性能并优化参数整定方法。
二阶系统自抗扰控制的扩张状态观测器的改进

x1(
t),
x2(
调节I
LESO 的观测器带宽,并且可以进一步提升系统的暂态特性 .通过稳态误差分析探讨了 I
LESO 的稳定性条件 .
利用主导极点的方法分析得到两个调节因子与暂态性能、观测带宽的关系 .该方法同样可推广到高阶系统 .
关键词:线性自抗扰控制;扩张状态观测器;暂态性能;观测带宽
中图分类号:
O231.
2
文献标志码:
[]
ADRC 的应用,
GAO5 在 ADRC 的基 础上提出了线
性 ADRC(
LADRC),并将待整定的参数与控制器和
[
4]
观测器的带宽联系起来,从而将整定参数降低为3个,
简化了系统结构,
极大地促进了其在工程上的应用.
作为 LADRC 最重要的结构,线性 ESO(
LESO)
承担着实时估计未知扰动的作用,从提出到现在,前
A
自抗扰控制技术(
a
c
t
i
v
ed
i
s
t
u
r
ban
c
er
e
e
c
t
i
on
j
[
1]
,
)
是韩京清
先生提出的一种非线性控
c
on
t
r
o
l ADRC
制方法,由 跟 踪 微 分 器、扩 张 状 态 观 测 器 (
e
x
t
end
e
d
s
t
a
t
eob
s
e
r
v
e
r,
ESO)和误差反馈控制器组成.
ADRC
自抗扰控制技术

自抗扰控制技术一、本文概述自抗扰控制技术是一种先进的控制策略,其核心在于通过内部机制的设计,使系统能够自动抵御和补偿外部干扰和内部参数变化对系统性能的影响。
随着现代工业系统的日益复杂,对控制系统的鲁棒性和稳定性的要求也越来越高,自抗扰控制技术的出现为解决这些问题提供了新的思路和方法。
本文将对自抗扰控制技术进行详细的介绍和分析。
我们将阐述自抗扰控制的基本原理和核心思想,包括其与传统控制方法的主要区别和优势。
我们将介绍自抗扰控制技术的关键组成部分,如扩展状态观测器、非线性状态误差反馈控制律等,并详细解析其在控制系统中的作用和实现方式。
我们将通过实例分析和仿真实验,验证自抗扰控制技术在提高系统鲁棒性和稳定性方面的实际效果,并探讨其在实际工业应用中的潜力和前景。
本文旨在为从事控制系统设计、分析和优化的工程师和研究人员提供一种新的思路和方法,以应对日益复杂的工业控制问题。
也希望通过对自抗扰控制技术的深入研究和应用,为现代工业系统的智能化和自主化提供有力的技术支持。
二、自抗扰控制技术的基本原理自抗扰控制技术是一种先进的控制方法,其基本原理可以概括为对系统内部和外部扰动的主动抑制和补偿。
该技术的核心在于通过特定的控制策略,使系统在面对各种扰动时能够保持其稳定性和性能。
自抗扰控制技术的基本原理主要包括三个部分:扩张状态观测器(ESO)、非线性状态误差反馈(NLSEF)和跟踪微分器(TD)。
扩张状态观测器用于实时估计系统的总扰动,包括内部不确定性和外部干扰。
通过观测并提取这些扰动信息,系统能够在控制过程中主动抵消这些不利影响。
非线性状态误差反馈部分则根据观测到的扰动信息,通过非线性控制律的设计,实现对系统状态的快速调整。
这种非线性控制策略使得系统在面对扰动时能够迅速作出反应,从而保持其稳定性和性能。
跟踪微分器是自抗扰控制技术的另一个重要组成部分,它通过对期望信号的微分处理,生成一系列连续的指令信号。
这些指令信号能够引导系统以平滑、稳定的方式跟踪期望轨迹,进一步提高系统的控制精度和鲁棒性。
《2024年自抗扰控制器研究及其应用》范文

《自抗扰控制器研究及其应用》篇一一、引言自抗扰控制器(Active Disturbance Rejection Control, ADRC)作为一种先进的控制算法,其优越的性能使其在许多领域得到广泛应用。
本文旨在研究自抗扰控制器的原理、特性及其在不同领域的应用,以期为相关领域的研究和应用提供参考。
二、自抗扰控制器的原理与特性自抗扰控制器是一种基于现代控制理论的非线性控制器,其核心思想是通过实时观测和估计系统的状态,对系统进行前馈和反馈控制,以实现对系统扰动的有效抑制。
其原理主要包括跟踪微分器、扩张状态观测器和非线性状态误差反馈等部分。
自抗扰控制器具有以下特性:1. 鲁棒性强:自抗扰控制器对系统参数变化和外部扰动具有较强的鲁棒性,能够适应复杂的系统环境。
2. 动态响应快:自抗扰控制器能够快速响应系统状态的变化,实现系统的快速调整。
3. 适用范围广:自抗扰控制器适用于多种类型的系统和应用场景,具有较强的通用性。
三、自抗扰控制器在各领域的应用1. 电力系统:自抗扰控制器在电力系统中得到广泛应用,如风电、光伏等新能源并网控制、电力系统稳定控制等。
通过自抗扰控制器的应用,可以实现对电力系统的有效调节和控制,提高电力系统的稳定性和可靠性。
2. 航空航天:自抗扰控制器在航空航天领域具有重要应用价值。
例如,在飞行器控制系统中,自抗扰控制器可以实现对飞行器姿态和轨迹的精确控制,提高飞行器的稳定性和安全性。
3. 机器人技术:自抗扰控制器在机器人技术中也有广泛应用。
通过自抗扰控制器的应用,可以实现机器人的精确运动控制和路径规划,提高机器人的工作效率和稳定性。
4. 工业控制:自抗扰控制器在工业控制领域也具有重要应用价值。
例如,在化工、冶金等生产过程中,自抗扰控制器可以实现对生产过程的精确控制和优化,提高生产效率和产品质量。
四、自抗扰控制器的优化与改进尽管自抗扰控制器具有诸多优点,但仍存在一些不足和挑战。
为了进一步提高自抗扰控制器的性能和适用范围,需要进行以下优化和改进:1. 参数优化:通过优化自抗扰控制器的参数,提高其适应性和鲁棒性,使其在不同系统和应用场景下具有更好的性能。
自抗扰控制介绍

k
x2
k
1
x2
k
hf
h是采样时间,减小h可以提高跟踪性能,但是也会放大噪声!
21
跟 踪 阶 跃 信 号 , r=10,h=0.01 1.4
速度曲线 3.5
3 1.2
2.5 1
2
0.8
1.5
0.6
1
0.5 0.4
0
0.2 -0.5
0
0
1
2
3
4
5
6
7
8
9 10
-1
0
1
2
3
4
5
6
7
8
9 10
缺陷:系统进入稳态后就会产生不能令人满意的高频颤振!
因为连续函数的最优函数不再是该函数离散化后的最优函数。
22
改进的算法fhan
u fhan x1, x2, r, h
d rh
d0 hd
y
x1
hx2
a0 d 2 8r y
a
x2
a0
2
d
sign
y
x2
y h
fhan
rsign
r
a d
a,
,
a a
d d
, y d0 , y d0
40
e1 v1 z1, e2 v2 z2
u0 1e1 2e2
u0 u0
1 fal e1,1, 2 fhan e1, e2 , r, h1
fal
e2 ,2 ,
,0
1
1 2
u0 fhan e1, ce2 , r, h1
u
u0
z3 b0
, or,
u
船舶动力定位系统的自抗扰控制研究
参考内容二
一、引言
在工业控制领域,大时滞系统是一类具有较大时间常数的系统,它们通常具 有复杂的动态行为,难以用传统的控制方法进行精确控制。自抗扰控制(Active Disturbance Rejection Control, ADRC)是一种针对非线性系统的控制策略, 它通过引入扩张状态观测器(Extended State Observer, ESO)来估计系统中 的未知扰动和噪声,并对其进行补偿。本次演示将探讨大时滞系统的自抗扰控制 方法。
此外,针对实验中发现的观测器带宽和非线性状态误差反馈控制器参数选择 对控制器性能的影响,未来研究可以探索更精细的参数优化方法,以提高船舶动 力定位系统的性能。还可以将自抗扰控制与其他先进控制策略相结合,形成复合 控制方案,进一步提升船舶动力定位系统的整体性能。
参考内容
பைடு நூலகம்言
随着全球经济的不断发展,水上交通运输业日益繁荣。然而,水上环境的复 杂性和不确定性给船舶的航行安全和稳定性带来了严峻挑战。欠驱动水面船舶作 为一种常见的水上交通工具,其航迹控制问题成为了一个亟待解决的关键问题。 本次演示旨在研究欠驱动水面船舶航迹自抗扰控制,提高其航行性能和安全性。
二、自抗扰控制的基本原理
自抗扰控制主要包括两个部分:扩张状态观测器(ESO)和跟踪微分器 (TD)。ESO通过观测系统的输出和状态,估计系统中的扰动和噪声,并通过反 馈控制器补偿这些扰动。TD则用于生成参考信号,使系统能够更好地跟踪设定值。
三、大时滞系统的自抗扰控制
对于大时滞系统,自抗扰控制具有以下优点:
在实验过程中,我们发现扩张状态观测器的带宽对控制器的性能具有重要影 响。当观测器带宽过小或过大时,控制器的性能可能下降。因此,针对不同应用 场景,合理选择观测器带宽是提高自抗扰控制器性能的关键。此外,我们还发现 非线性状态误差反馈控制器的参数选择对控制器的性能也有较大影响。通过精细 化调整控制器参数,可以进一步提高船舶动力定位系统的性能。
基于扩张状态观测器的永磁同步电机自抗扰无源控制

控制与应用技术I EMCA違权控刹名阄2018,45 (5)基于扩张状态观测器的永磁同步电机自抗扰无源控制#吴嘉欣1,2,朱保鹏1,张懿!2,魏海峰!2(!江苏科技大学,江苏镇江212003;2.江苏开璇智能科技有限公司,江苏苏州215000 $摘要:针对传统永磁同步电机滑模控制存在的抖振以及系统抗扰动鲁棒性差问题,提出一种基于扩张 状态观测器的永磁同步电机自抗扰控制方法。
计自滑模控制器,扩张状态观测器对系统干扰项观测,前馈补偿。
电流内环将控制与自抗扰控制相融合,得系的电。
新型控制方制系统抖振,系统鲁棒性。
提控制方法的性和实用性。
关键词!永磁同步电机"扩张状态观测器"自抗扰控制"无源控制中图分类号:TM 301 文献标志码!A 文章编号:1673-6540(2018)05-0008-06Active Disturbances Rejection and Passive Control of PMSMBased on Extended State Observer #WU Jiaxin12,ZHU Baopeng1,ZHANG Yi 12,WEI Haifeng12Jiangsu University of Science and Technology,Zhenjiang 212003, China%(1.2. Jiangsu Kai Xuan Intelligent Technology Co.,Ltd.,Suzhou 215000,China)Abstract: T he traditional sliding mode control ( SMC) of permanent magnet synchronous motor ( PMSM) had buffeting problem,and its robustness to perturbation was poor. I n view of this problem,a method of activedisturbances rejection control (ADRC) and passive-based control (PBC) for PMSM based on extended state observer(ESO) was proposed. I n out speed loop,a adaptive SMC was designed,and the system disturbanc for feedforward compensation by using the ESO. I n internal current loop,PBC was combined with ADRC t voltage reference in the rotating coordinate s ystem. T he newcontrol method could effectively s uppress the system buffeting and enhance the robustness of the system. T he experimental results verified the effectiveness andpracticability of the proposed method.Key words :permanent magnet synchronous motor ( PMSM)% extended state observer %active disturbances rejection control (ADRC)% passive-based control,— M〇tor,PMSM)由于非线性、多变量、强耦合等特,控制系统受电机 动、扰动以永磁同步电机(Permanent Magnet Synchronous及 性动态等因素影响,使得获得高性能的#基金项目:国家自然科学基金项目(61503161,51707082)%江苏省产学研前瞻性联合研究项目(BY2016073-01)%江苏省研究生科 研与实践创新计划项目作者简介:吴嘉欣(1994一),女,硕士研究生,研究方向为电机驱动控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
串联型扩张状态观测器构成的自抗扰控制器
张荣重庆大学工商管理学院
韩京清
中国科学院系统科学研究所
摘要利用自抗扰控制器控制阶对象需要调整扩张状态观测器的个参数结构和参数相同的个二阶扩张状态观测器串联而成的串联型扩张状态观测器具有阶扩张状态观测器的功能用其构成的自抗扰控制器参数易于调整便于工程应用
关键词自抗扰控制器扩张状态观测器不确定系统
分类号
引言
自抗扰控制器在被控对象阶数小于时根据对象模型的变化范围适当调整控制器参数会取得较好的控制效果但当对象阶数大于时要调出一组满意的控制器参数并非易事调整
参数关键是调整其中的扩张状态观测器的参数的作用本质上是由对象输出观测出其各阶导数根据对象输出要获得其阶的各阶导数按原结构需建立阶并调出
个参数这可按如下方法实现取建立以对象输出作输入的阶和其阶导数作输入的阶来共同完成即把高阶分解成低阶的串联来实现低阶串联所成的总阶数比原来高但每个低阶参数的调整较容易从而给总体调整带来了便利
文献分析了二阶的误差估计和参数调整的一般规律本文用此结果把中的阶用个相同参数的二阶的串联来代替从而将中个参数的调整简化为两个参数的调整对高阶受控对象的仿真研究表明该方法是十分有效的
串联型扩张状态观测器构成的
自抗扰控制器
控制阶不确定对象
的原由如下部分组成
由参考输入安排过渡过程并提取其各阶导数的阶跟踪微分器
由对象输出提取其各阶导数及系统扰动总
国家自然科学基金项目和国家攀登计划项目
收稿修回
第卷第期控制与决策年月
和量的阶
由这两组导数之差及扰动总和量的估计值来产生控制量的函数发生器
欲使很好地工作关键是根据对象的一定特性调好阶原方程为
在函数已确定的情况下需要调整参数但是当
时欲调好并非易事
如果用个具有同一参数的二阶串联型方程
代替阶式时如何选择其参数对系统的状态变量记
我们希望中的能跟踪
而能估计出系统扰动的总和作用则经适当近似处理后可得误差
所满足的方程
这里每个二阶系统
其结构参数相同且相互独立只有不确定项有所不同现假定这些不确定量的变化范围有限由常数所限定即
文献对形如的二阶方程
进行了误差分析其稳态误差主要由决定而进一步缩小误差的办法是扩大不等式
为此在中让扩大使不等式
就能使误差满足跟踪要求这样就把中调整个参数的难题简化成调整中的两个参数的问题为的实用化带来极大便利
仿真例子
现给出个二阶串联型和个二阶
串联型所构成的分别控制三阶和四阶被控对象的仿真例子若按原仿真中需调整的参数分别是个和个而采用串联型构成的需调整的参数均减少为个这样就大大降低了调整参数的难度
例三阶被控对象为
图例仿真结果
第卷第期张荣等串联型扩张状态观测器构成的自抗扰控制器
其阶跃响应仿真结果如图所示
例四阶被控对象为
其仿真结果如图所示
图例仿真结果
这两个例子中是方波外扰串联型的每个二阶子系统的参数都取图中是安排的过渡过程是实际响应是控制量是对象右端除以外的扰动总和量而是扰动总和量的估计几乎重合
结语
高阶结构中所含高阶的参数是较难调整的为此本文提出了用低阶串联型代替高阶的方法该方法尽管提高了的阶数但对参数调整却带来了极大方便并且用串联型改造的控制高阶对象仍十分有效
参考文献
韩京清一类不确定对象的扩张状态观测器控制与决策
韩京清张荣二阶扩张状态观测器的误差分析系统科学与数学
见控制理论及其应用年会论文集宁波
作者简介
张荣男年生年于中国科学院系统科学研究所获系统理论博士学位现于重庆大学技术经济与管理博士后流动站工作主要研究领域为控制系统的非线性设计混沌理论
韩京清见本刊年第卷第期第页
控制与决策年
串联型扩张状态观测器构成的自抗扰控制器
作者:张荣, 韩京清
作者单位:张荣(重庆大学工商管理学院,400044), 韩京清(中国科学院系统科学研究所)
刊名:
控制与决策
英文刊名:CONTROL AND DECISION
年,卷(期):2000,15(1)
被引用次数:19次
1.Hong Yiguang;Zhang Rong;Han Jingqing Nonlinear observer design and application 1998
2.韩京清;张荣二阶扩张状态观测器的误差分析 1999(04)
3.韩京清一类不确定对象的扩张状态观测器[期刊论文]-控制与决策 1995(01)
1.姜萍.郝靖宇.宗晓萍.王培光自抗扰控制器的simulink建模与仿真[期刊论文]-自动化技术与应用 2010(2)
2.李永刚.李星野.史先鹏基于扩张状态观测器的一类未知非线性不确定系统滑模控制[期刊论文]-上海理工大学学报 2010(2)
3.李海涛.房建成基于扩张状态观测器的DGMSCMG框架伺服系统振动抑制方法[期刊论文]-航空学报 2010(6)
4.解永清.郑恩让.陈蓓抄纸过程水分定量自抗扰控制仿真研究[期刊论文]-计算机仿真 2009(1)
5.程国扬.曾佳福快速定位伺服系统的控制器设计[期刊论文]-电机与控制学报 2009(1)
6.曾佳福.程国扬利用非线性控制技术改善伺服系统的性能[期刊论文]-电气传动 2009(2)
7.苏学荣.何凌云.常文森磁悬浮系统的两种非线性自抗扰控制方法对比研究[期刊论文]-电力机车与城轨车辆2008(1)
8.马燕.夏超英单级旋转倒立摆的自抗扰控制[期刊论文]-电气传动 2007(6)
9.杨丽君.卢志刚三阶线性跟踪-微分器的收敛性证明及仿真研究[期刊论文]-燕山大学学报 2006(1)
10.彭小兰惯导系统航向环的改进设计与研究[学位论文]硕士 2006
11.熊成林基于优化的ADRC在异步电机矢量控制系统中的应用研究[学位论文]硕士 2006
12.李志刚广义通用模型控制器研究[学位论文]硕士 2006
13.雷春林.吴捷.陈渊睿.杨金明自抗扰控制在永磁直线电机控制中的应用[期刊论文]-控制理论与应用 2005(3)
14.李乔并联型混合有源电力滤波器的自抗扰与H<,∞>鲁棒控制[学位论文]博士 2005
15.苏刚基于先进控制的基因芯片微点阵仪自动控制系统研究[学位论文]博士 2005
16.刘希喆永磁直线电机的自抗扰与频域鲁棒控制[学位论文]博士 2004
17.余涛电力系统非线性鲁棒协调控制方法的研究[学位论文]博士 2003
18.张荣基于串联型扩张状态观测器的参数辨识[期刊论文]-系统仿真学报 2002(6)
19.张荣基于串联型自抗扰控制器的逐次求精法[期刊论文]-重庆大学学报(自然科学版) 2000(5)
本文链接:/Periodical_kzyjc200001034.aspx。