自抗扰控制介绍
自抗扰算法介绍报告
自抗扰算法(ADRC )介绍报告自抗扰控制器自PID 控制器演变过来,采取了PID 误差反馈控制的核心理念。
传统PID 控制直接引取输出于参考输入做差作为控制信号,导致出现响应快速性与超调性的矛盾出现。
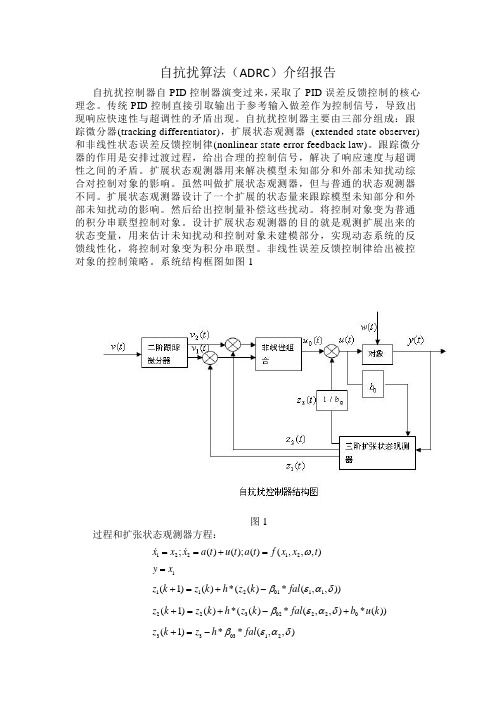
自抗扰控制器主要由三部分组成:跟踪微分器(tracking differentiator),扩展状态观测器 (extended state observer) 和非线性状态误差反馈控制律(nonlinear state error feedback law)。
跟踪微分器的作用是安排过渡过程,给出合理的控制信号,解决了响应速度与超调性之间的矛盾。
扩展状态观测器用来解决模型未知部分和外部未知扰动综合对控制对象的影响。
虽然叫做扩展状态观测器,但与普通的状态观测器不同。
扩展状态观测器设计了一个扩展的状态量来跟踪模型未知部分和外部未知扰动的影响。
然后给出控制量补偿这些扰动。
将控制对象变为普通的积分串联型控制对象。
设计扩展状态观测器的目的就是观测扩展出来的状态变量,用来估计未知扰动和控制对象未建模部分,实现动态系统的反馈线性化,将控制对象变为积分串联型。
非线性误差反馈控制律给出被控对象的控制策略。
系统结构框图如图1图1过程和扩张状态观测器方程:1y x =22302220(1)()*(()*(,,)*())z k z k h z k fal b u k βεαδ+=+-+1120111(1)()*(()*(,,))z k z k h z k fal βεαδ+=+-12212;()();()(,,,)x x x a t u t a t f x x t ω==+=330312(1)**(,,)z k z h fal βεαδ+=-非线性控制策略方程:二阶微分控制器:112(1)()*()v k v k h v k +=+2212(1)()*(()(),(),,)v k v k h fhan v k v k v k r h +=+-其中,h 为积分步长,r 为跟踪算子。
自抗扰控制器参数整定方法的研究
自抗扰控制器参数整定方法的研究自抗扰控制器(Active Disturbance Rejection Controller,ADRC)是一种具有鲁棒性的控制方法,它在各个领域得到了广泛的应用。
然而,自抗扰控制器的性能很大程度上取决于参数的整定。
因此,研究自抗扰控制器参数整定方法具有重要的实际意义。
自抗扰控制器参数整定方法的研究发展迅速,现有的研究主要集中在理论分析和实验设计两个方面。
在理论分析方面,研究者们主要从扰动的估计和控制器设计两个方面展开研究。
在实验设计方面,则主要控制器的实现及其对不同系统的应用。
然而,现有的研究还存在一些问题,如参数整定缺乏系统性,实验验证不够充分等。
本文从理论分析和实验设计两个方面研究自抗扰控制器参数整定方法。
基于自抗扰控制器的原理,建立系统的数学模型。
然后,采用遗传算法对控制器参数进行全局搜索和优化,以实现最佳控制效果。
通过实验验证所提出方法的可行性和优越性。
通过实验验证了所提出方法的可行性和优越性。
实验结果表明,本文所提出的参数整定方法能够有效提高自抗扰控制器的性能,减小系统的稳态误差和超调量。
同时,对比实验也证明了本文所提出方法的有效性。
本文研究了自抗扰控制器参数整定方法,提出了一种基于遗传算法的全局优化方法。
通过理论分析和实验验证,证明了所提出方法的有效性和优越性。
然而,本文的研究仍存在一些不足之处,如未考虑非线性系统、控制器的优化算法还有待进一步改进等。
未来的研究方向可以包括拓展该方法在复杂系统和非线性系统中的应用,优化控制器的设计以及发展更加智能化的优化算法。
在复杂工业生产过程中,系统的干扰和不确定性常常成为制约控制系统性能的主要因素。
为了提高系统的抗干扰能力和鲁棒性,自抗扰控制(Active Disturbance Rejection Control,ADRC)方法应运而生。
同时,为了使控制系统达到最佳性能,对控制器参数进行合理整定也显得尤为重要。
本文将围绕自抗扰控制及控制器参数整定方法展开研究,旨在提高控制系统的性能并优化参数整定方法。
自抗扰控制器参数的整定及应用

图 2电机1 匠 速. 负载转矩突然变化时系轨迹为圆形 , 负载转矩 的变化 对输 出转速基本无影响, 定子三相电流的畸变小 , 说明控制系统的 低速l 生 能 很 好。
式中, v( t ) 是输入信号, h 称为步长, v 用于跟踪 v( t ) , V 2 是v 图3 为负载转矩为5 N・ m, 在t =0 . 5 s 时电机转速由1 2 0 0 r / ai r n 变 的微分, r 。 称 为 快 慢 因 子。 引进 参 数h , 可知 6 = h r , h 称 为滤 波 因 为1 0 0 r / mi n , 在t = 1 . O s 时, 又变为6 0 0 r / mi n 时的永磁同步电机控制 其中( a )图是定 子磁 链 轨 迹 ,( b ) 图是 永磁 电机 转 子, 它是 决定 噪 声滤 波 效 应 的 参数 。 r 。 增大, 信 号 跟踪 效果 好。 h 增 系统 仿 真 波 形 。
杂的控制对象。 传统的永磁电动机转速P I 调节器中的扰动是负载转 4 . 仿真结果 及其分析 矩, 但是, 一组 P I 参 数 只能对 特 定 的系统模 型 进行 较好 的 调节 , 并不 本文使用了永磁电动机F YT 2 6 0 0 , 额定电压U = 3 8 0 V, 额定功 能 适 应 永磁 同步 电动 机运 行 的各 个工况 。自 抗 扰 控制 器 ( AD R C ) 不 率P = 2 . 6 KW。 永磁变频电机的低频调速性能是该类电机的主要考 图2 为 电机 转 速n = 1 0 0 r / ai r n 时, 在t = 0 . 5 s 时, 负 载转 矩 依 赖 于 系统 的精 确 模 型 。 所以, 本 文 将 自抗 扰 控制 器 参数 的整 定方 核 指 标 之一。
2 . 1 T D 中参数的选取原则
无人机非线性自抗扰控制方法研究

无人机非线性自抗扰控制方法研究
RESEARCH OF NONLINEAR ACTIVE DISTURBANCE REJECTION CONTROL WITH APPLICATIONS TO UNMANNED AERIAL VEHICLE
曹宇
哈尔滨工业大学 2013 年 7 月
国内图书分类号: V249 国际图书分类号: 08115
哈尔滨工业大学工学硕士学位论文
Abstract
UAV is a special air force aircraft, characterized by the major feature “no pilot”. Due to such feature; UAV is known as " wing of the crack troops " in the military field of the 21th century, In the local wars of modern times, the optimal choice of reducing the cost of war is to reduce or even avoid casualties; UAV is gradually rising in the competation of weapons of the present time due to its outstanding advantages. In order to meet better the requirement of war under the condition of informaliztion; it is extremely urgent to improve the performance of flight control for UAV. Considering the fact that UAV conduct autonomous flight through aerodynamic force to overcome its own weight; UAV is inevitably to suffer from all kinds of disturbance. Obviously, the tradition control method of linearization; often used for the elimination of interference errors, no longer apply here. Starting from the principles of ADRC, this study mainly concentrate on UAV flight Control strategy using ADRC, and try to solve the problem of declining in stability and maneuverability when using nonllinear ADRC to deal with CONTROL PROBLEMS OF UAV with all kinds of disturbances. Firstly, nonlinear mathematical model of UAV flight control system with six degrees of freedom was built on the base of understanding of motion characteristics of UAV, and the nolinear model is simplified to a linear one based om small disturbance assumption. Based on this analysis of kinematics characteristics of longitudinal direction and Lateral longitudinal direction of UAV; the kinematics model of longitudinal and Lateral longitudinal are built and the key point of the paper is establised:A reasonable math model of UAV with ideal performance and effective suppression of interference is bult, and the foundation for further study is laid. Secondly, an in-depth study of the ADRC method is made, and the structure, the function and the working priciple of the controller is clearified. Stability of the second order extended state observer (ESO) is demonstrated through method of Lyapunov and the necessary and sufficient condition of the maintainance of the stability is clearified. The evaluation criteria of error convergence of ESO is given by error anlysis. Design mehtod of ESO and principles for parameter selection is given based on filter of feed back structure of fal funcion. Thirdly, aiming at the climb / decline phase of UAV; the reference movement is taken as the non- tilting and non-sliding flight of UAV , the attitude angle tracking loop is designed and a simulation platform is built. Through the design of control loop and the seeking of reasonable control parameters, the pitch attitude control problem under the disturbances of air current and gas stream and a is completed and combination control strategy of ADRC and PI is proposed. Through the analysis
自抗扰控制器参数整定方法及其在热工过程中的应用共3篇

自抗扰控制器参数整定方法及其在热工过程中的应用共3篇自抗扰控制器参数整定方法及其在热工过程中的应用1自抗扰控制器参数整定方法及其在热工过程中的应用在热工过程中,控制系统的稳定性和效率是非常重要的。
为了保证热能系统的运行稳定、安全和高效,我们需要使用一种有效的控制方法。
自抗扰控制器(active disturbance rejection controller,ADRC)是一种新型的控制器,它是由中国科学家郑裕彤于1998年提出的一种基于扰动观测器的控制策略。
ADRC相比于传统PID控制器具有更好的控制性能。
它能够有效地抵消扰动对于系统的影响,并且具有较强的干扰抑制能力、响应速度较快、参数调节简单等优点。
因此,在工业生产领域,ADRC得到了广泛的应用。
对于ADRC的参数调节,在实际应用中比较关键。
目前,研究者们提出了许多方法来进行ADRC的参数整定。
这里介绍一种基于模糊控制的ADRC参数整定方法。
该方法采用模糊控制的思想,将ADRC的三个参数Kp、γ和h放入模糊控制器中,进行整定。
模糊控制器通过模糊规则库,将输入变量与输出变量进行模糊化,并根据模糊化后的变量计算出相应的控制增益。
通过这种方法,可以快速地获得较优的控制参数,进而提高系统的控制性能。
在热工过程中,ADRC应用广泛。
例如,在锅炉控制领域中,ADRC可以通过对加热器温度进行控制,控制锅炉内的热水温度,实现锅炉运行的稳定和高效。
此外,ADRC还可以用于控制热力发电机组中的蒸汽流量,保证汽轮机的运行稳定和高效。
同时,ADRC也可以应用于化工厂中的反应釜、蒸馏塔等设备,实现反应过程的控制。
总之,ADRC是一种非常有效的控制方法,在热工过程中的应用前景广阔。
通过合适的参数整定方法,可以使ADRC更好的发挥其控制优势,在生产实践中实现控制自动化、稳定性和高效性综上所述,ADRC是一种高效、稳定、灵活的控制方法,广泛应用于热工过程中。
其优点包括对多种扰动的抗干扰能力以及响应速度较快等。
自抗扰控制器ADRC背景分析及发展应用现状

60年代
最优控制,留苏(不变性原理)
70年代
制导理论,反馈系统的标准型
80年代
线性系统理论,计算机辅助设计
1989-
自抗扰控制
韩京清教授的自抗扰控制演变过程
内容导航 自抗扰控制器原理的起源及背景 自抗扰控制器国内外研究现状 自抗扰控制器的结构及实现 总结及未来发展趋势
自抗扰控制器国内外研究现状
ADRC具有自抗扰能力,对模型参数误差不敏感等优点,但算法复 杂,且可调节参数很多,这对ADRC的应用造成很大的障碍。高志 强教授在2003年提出了简化、归一化参数的ADRC设计思想 《Scaling and bandwidth-parameterization based controller tuning》 ,为ADRC的工程应用提供了设计思路。其后,在此基础上逐步形 成了线性ADRC控制算法,并将其应用于多种工业领域中。
ADRC的应用
下图为韩京清教授于1997年访美后(Cleveland State University, Gao Zhiqiang),ADRC算法在美国的商业化历程
1997
韩京清教授访美,调试成功了第一台 ADRC控制伺服机构
2001
在国际会议中发表ADRC相关文章
2003 2008
提出线性化、参数规范化ADRC,并 获得专利
从图中可以看出,自抗扰控制器由三部分组成,分别是 安排过渡过程TD、扩张状态观测器ESO和非线性PID。
自抗扰控制器的结构及实现
安排过渡过程TD
安排过渡过程是通过对输入信号V的处理,得到一个较缓慢的跟 踪信号V1来追踪输入信号,同时生成输入信号的微分V2来跟踪输入信 号的微分。其原理为一个简单的微分观测器,则安排过渡过程的离散 化算法为:
自抗扰控制器研究及其应用

自抗扰控制器设计
自抗扰控制器设计的关键因素包括:
1、扰动估计与补偿:通过引入扩张状态观测器(ESO),自抗扰控制器能够实 时估计系统中的扰动和不确定性,并采用补偿算法对其进行抑制。
2、控制器优化:针对不同的系统和应用场景,需要优化控制器的参数,以提 高自抗扰控制器的性能和鲁棒性。
3、状态观测器设计:状态观测器是自抗扰控制器的核心组成部分,其设计需 要考虑系统的动态特性和噪声干扰等因素。
作,取得了重要的理论成果。在国内,研究者们也在积极探索自抗扰控制器的 优化算法和应用拓展,不断推动ADRC技术的发展。
技术原理
自抗扰控制器充分利用了系统的结构和参数信息,通过实时估计和补偿内外扰 动的影响,使系统具有良好的跟踪性能和抗干扰能力。自抗扰控制器主要由跟 踪微分器、扩张状态观测器(ESO)和非线性状态误差反馈部分组成。其中,
结论与展望
通过对自抗扰控制器的研究和应用分析,可以得出以下结论:
1、自抗扰控制器作为一种新型的非线性控制策略,具有优良的性能和适应能 力,在许多领域得到了广泛的应用。
2、自抗扰控制器的技术原理主要是通过跟踪微分器、扩张状态观测器和非线 性状态误差反馈部分的协同作用,实现系统的扰动抑制和鲁棒控制。
探索自抗扰控制器的智能优化方法。总之,自抗扰控制器的研究和应用前景广 阔,有望在更多领域为人类社会带来更多的利益和价值。
引言
自抗扰控制器(Active Disturbance Rejection Controller,ADRC)是一 种具有较强鲁棒性的控制方法,适用于多种系统和场景。在面对复杂环境和非 线性系统时,自抗扰控制器能够有效地抑制干扰,提高系统的性能和稳定性。
在自抗扰控制器设计过程中,需要注意以下事项:
自抗扰控制入门

阅读感受
这本书还对自抗扰控制的关键实现技术进行了深入的探讨。这些技术包括如 何选择合适的参数、如何处理系统的不确定性和干扰等。这些技术是实现自抗扰 控制的难点,也是决定自抗扰控制性能的关键。通过深入了解这些技术,我们可 以更好地优化自抗扰控制系统的性能。
阅读感受
这本书还提供了自抗扰控制的典型应用案例。这些案例包括无人机控制、机 器人控制等,展示了自抗扰控制在不同领域的应用效果。通过这些案例,我们可 以看到自抗扰控制技术的广泛应用前景,也可以为我们提供应用自抗扰控制的灵 感和参考。
通过阅读《自抗扰控制入门》这本书,读者可以全面了解自抗扰控制技术的核心思想和实现方法, 掌握ESO算法的设计和应用技巧,学会将自抗扰控制应用于解决实际工程问题。无论是对控制理 论感兴趣的学者,还是从事控制系统设计的工程师,都能从这本书中获得宝贵的启示和帮助。
精彩摘录
精彩摘录
《自抗扰控制入门》是一本深入浅出地介绍自抗扰控制技术的书籍。在这本 书中,作者不仅详细阐述了自抗扰控制的基本原理,还通过丰富的实例和实际应 用展示了自抗扰控制在解决复杂控制系统问题中的优势。以下是从书中摘录的一 些精彩内容,这些内容对于理解自抗扰控制的核心思想和实际应用具有重要的参 考价值。