自抗扰控制技术简介
《自抗扰控制器研究及其应用》范文

《自抗扰控制器研究及其应用》篇一一、引言自抗扰控制器(Active Disturbance Rejection Control, ADRC)作为一种先进的控制算法,以其独特的控制策略和优异的性能在复杂系统和不确定环境下表现出色。
它以鲁棒性强、适应性强和快速响应等优势,广泛应用于航空、航天、机器人、电力系统和制造业等多个领域。
本文将就自抗扰控制器的原理、研究进展以及应用进行详细的探讨。
二、自抗扰控制器的原理自抗扰控制器是一种基于现代控制理论的非线性控制方法,其核心思想是通过实时观测和估计系统的状态和扰动,从而实现对系统精确的控制。
它主要由三个主要部分组成:跟踪微分器、非线性状态误差反馈和状态观测器。
首先,跟踪微分器负责为系统提供平滑的参考信号及其微分值。
这有助于系统在受到干扰时保持稳定。
其次,非线性状态误差反馈将估计的状态误差通过非线性状态反馈函数生成控制量,使系统状态尽快回到参考值。
最后,状态观测器用于实时观测系统的状态和扰动,为非线性状态误差反馈提供必要的反馈信息。
三、自抗扰控制器的研究进展近年来,自抗扰控制器在理论研究和应用方面取得了显著的进展。
在理论研究方面,学者们对自抗扰控制器的稳定性、鲁棒性和性能优化等方面进行了深入研究,提出了一系列改进的算法和策略。
这些研究为自抗扰控制器在复杂系统和不确定环境下的应用提供了坚实的理论基础。
在应用方面,自抗扰控制器已广泛应用于航空、航天、机器人、电力系统和制造业等多个领域。
例如,在航空航天领域,自抗扰控制器被用于飞行器的姿态控制和轨迹跟踪等任务;在机器人领域,自抗扰控制器被用于机器人的运动控制和路径规划等任务;在电力系统中,自抗扰控制器被用于提高电力系统的稳定性和可靠性等任务。
这些应用充分展示了自抗扰控制器的优越性能和广泛的应用前景。
四、自抗扰控制器的应用1. 航空航天领域:在航空航天领域,自抗扰控制器被广泛应用于飞行器的姿态控制和轨迹跟踪等任务。
由于航空航天系统的复杂性和不确定性,传统的控制方法往往难以满足要求。
自抗扰控制器参数整定方法及其在热工过程中的应用共3篇

自抗扰控制器参数整定方法及其在热工过程中的应用共3篇自抗扰控制器参数整定方法及其在热工过程中的应用1自抗扰控制器参数整定方法及其在热工过程中的应用在热工过程中,控制系统的稳定性和效率是非常重要的。
为了保证热能系统的运行稳定、安全和高效,我们需要使用一种有效的控制方法。
自抗扰控制器(active disturbance rejection controller,ADRC)是一种新型的控制器,它是由中国科学家郑裕彤于1998年提出的一种基于扰动观测器的控制策略。
ADRC相比于传统PID控制器具有更好的控制性能。
它能够有效地抵消扰动对于系统的影响,并且具有较强的干扰抑制能力、响应速度较快、参数调节简单等优点。
因此,在工业生产领域,ADRC得到了广泛的应用。
对于ADRC的参数调节,在实际应用中比较关键。
目前,研究者们提出了许多方法来进行ADRC的参数整定。
这里介绍一种基于模糊控制的ADRC参数整定方法。
该方法采用模糊控制的思想,将ADRC的三个参数Kp、γ和h放入模糊控制器中,进行整定。
模糊控制器通过模糊规则库,将输入变量与输出变量进行模糊化,并根据模糊化后的变量计算出相应的控制增益。
通过这种方法,可以快速地获得较优的控制参数,进而提高系统的控制性能。
在热工过程中,ADRC应用广泛。
例如,在锅炉控制领域中,ADRC可以通过对加热器温度进行控制,控制锅炉内的热水温度,实现锅炉运行的稳定和高效。
此外,ADRC还可以用于控制热力发电机组中的蒸汽流量,保证汽轮机的运行稳定和高效。
同时,ADRC也可以应用于化工厂中的反应釜、蒸馏塔等设备,实现反应过程的控制。
总之,ADRC是一种非常有效的控制方法,在热工过程中的应用前景广阔。
通过合适的参数整定方法,可以使ADRC更好的发挥其控制优势,在生产实践中实现控制自动化、稳定性和高效性综上所述,ADRC是一种高效、稳定、灵活的控制方法,广泛应用于热工过程中。
其优点包括对多种扰动的抗干扰能力以及响应速度较快等。
自抗扰控制技术

自抗扰控制技术一、本文概述自抗扰控制技术是一种先进的控制策略,其核心在于通过内部机制的设计,使系统能够自动抵御和补偿外部干扰和内部参数变化对系统性能的影响。
随着现代工业系统的日益复杂,对控制系统的鲁棒性和稳定性的要求也越来越高,自抗扰控制技术的出现为解决这些问题提供了新的思路和方法。
本文将对自抗扰控制技术进行详细的介绍和分析。
我们将阐述自抗扰控制的基本原理和核心思想,包括其与传统控制方法的主要区别和优势。
我们将介绍自抗扰控制技术的关键组成部分,如扩展状态观测器、非线性状态误差反馈控制律等,并详细解析其在控制系统中的作用和实现方式。
我们将通过实例分析和仿真实验,验证自抗扰控制技术在提高系统鲁棒性和稳定性方面的实际效果,并探讨其在实际工业应用中的潜力和前景。
本文旨在为从事控制系统设计、分析和优化的工程师和研究人员提供一种新的思路和方法,以应对日益复杂的工业控制问题。
也希望通过对自抗扰控制技术的深入研究和应用,为现代工业系统的智能化和自主化提供有力的技术支持。
二、自抗扰控制技术的基本原理自抗扰控制技术是一种先进的控制方法,其基本原理可以概括为对系统内部和外部扰动的主动抑制和补偿。
该技术的核心在于通过特定的控制策略,使系统在面对各种扰动时能够保持其稳定性和性能。
自抗扰控制技术的基本原理主要包括三个部分:扩张状态观测器(ESO)、非线性状态误差反馈(NLSEF)和跟踪微分器(TD)。
扩张状态观测器用于实时估计系统的总扰动,包括内部不确定性和外部干扰。
通过观测并提取这些扰动信息,系统能够在控制过程中主动抵消这些不利影响。
非线性状态误差反馈部分则根据观测到的扰动信息,通过非线性控制律的设计,实现对系统状态的快速调整。
这种非线性控制策略使得系统在面对扰动时能够迅速作出反应,从而保持其稳定性和性能。
跟踪微分器是自抗扰控制技术的另一个重要组成部分,它通过对期望信号的微分处理,生成一系列连续的指令信号。
这些指令信号能够引导系统以平滑、稳定的方式跟踪期望轨迹,进一步提高系统的控制精度和鲁棒性。
自抗扰控制器ADRC背景分析及发展应用现状

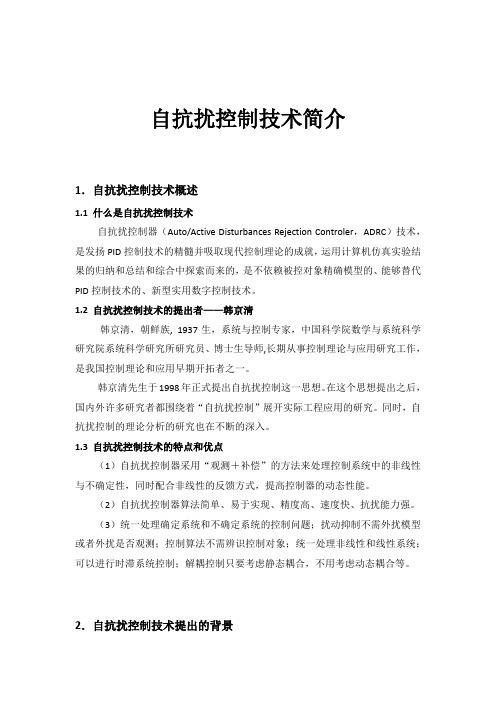
60年代
最优控制,留苏(不变性原理)
70年代
制导理论,反馈系统的标准型
80年代
线性系统理论,计算机辅助设计
1989-
自抗扰控制
韩京清教授的自抗扰控制演变过程
内容导航 自抗扰控制器原理的起源及背景 自抗扰控制器国内外研究现状 自抗扰控制器的结构及实现 总结及未来发展趋势
自抗扰控制器国内外研究现状
ADRC具有自抗扰能力,对模型参数误差不敏感等优点,但算法复 杂,且可调节参数很多,这对ADRC的应用造成很大的障碍。高志 强教授在2003年提出了简化、归一化参数的ADRC设计思想 《Scaling and bandwidth-parameterization based controller tuning》 ,为ADRC的工程应用提供了设计思路。其后,在此基础上逐步形 成了线性ADRC控制算法,并将其应用于多种工业领域中。
ADRC的应用
下图为韩京清教授于1997年访美后(Cleveland State University, Gao Zhiqiang),ADRC算法在美国的商业化历程
1997
韩京清教授访美,调试成功了第一台 ADRC控制伺服机构
2001
在国际会议中发表ADRC相关文章
2003 2008
提出线性化、参数规范化ADRC,并 获得专利
从图中可以看出,自抗扰控制器由三部分组成,分别是 安排过渡过程TD、扩张状态观测器ESO和非线性PID。
自抗扰控制器的结构及实现
安排过渡过程TD
安排过渡过程是通过对输入信号V的处理,得到一个较缓慢的跟 踪信号V1来追踪输入信号,同时生成输入信号的微分V2来跟踪输入信 号的微分。其原理为一个简单的微分观测器,则安排过渡过程的离散 化算法为:
《自抗扰控制器研究及其应用》

《自抗扰控制器研究及其应用》篇一一、引言自抗扰控制器(Active Disturbance Rejection Control, ADRC)作为一种先进的控制算法,其在实际工程中的广泛应用受到了越来越多的关注。
ADRC控制策略通过有效地对外部扰动进行抑制,以及对系统内部干扰的抵抗,展现出了其出色的控制性能。
本文将深入探讨自抗扰控制器的理论基础、设计方法及其在各种领域的应用。
二、自抗扰控制器的理论基础自抗扰控制器是一种基于现代控制理论的算法,其基本思想是通过引入适当的控制策略,对系统中的各种扰动进行抑制和消除,以达到提高系统稳定性和性能的目的。
该算法的核心在于对系统模型进行精确的描述,并在此基础上设计出合适的控制器。
三、自抗扰控制器的设计方法自抗扰控制器的设计主要包括以下几个步骤:系统建模、扰动分析、控制器设计及参数优化。
首先,需要建立系统的精确数学模型,包括系统的状态空间模型或传递函数等。
然后,对系统中的各种扰动进行分析,确定扰动的来源和性质。
接着,根据分析结果设计出合适的控制器,包括控制器的结构、参数和算法等。
最后,通过参数优化方法对控制器进行优化,以获得更好的控制性能。
四、自抗扰控制器的应用自抗扰控制器在各种领域都有广泛的应用,包括电力系统、航空航天、机器人控制、汽车工业等。
在电力系统中,ADRC可以有效地抑制电网中的各种扰动,提高电力系统的稳定性和供电质量。
在航空航天领域,ADRC可以实现对飞行器的精确控制,提高飞行安全性和飞行性能。
在机器人控制和汽车工业中,ADRC可以实现对机器人和汽车的精确运动控制,提高其运动性能和稳定性。
五、实例分析以电力系统的应用为例,介绍自抗扰控制器的实际应用。
在电力系统中,由于各种因素的影响,电网中常常会出现各种扰动,如负载扰动、电压扰动等。
这些扰动会导致电力系统的不稳定,甚至可能导致系统崩溃。
而通过引入自抗扰控制器,可以有效地抑制这些扰动的影响,提高电力系统的稳定性和供电质量。
自抗扰控制技术简介
自抗扰控制技术简介1.自抗扰控制技术概述1.1 什么是自抗扰控制技术自抗扰控制器(Auto/Active Disturbances Rejection Controler,ADRC)技术,是发扬PID控制技术的精髓并吸取现代控制理论的成就,运用计算机仿真实验结果的归纳和总结和综合中探索而来的,是不依赖被控对象精确模型的、能够替代PID控制技术的、新型实用数字控制技术。
1.2 自抗扰控制技术的提出者——韩京清韩京清,朝鲜族, 1937生,系统与控制专家,中国科学院数学与系统科学研究院系统科学研究所研究员、博士生导师,长期从事控制理论与应用研究工作,是我国控制理论和应用早期开拓者之一。
韩京清先生于1998年正式提出自抗扰控制这一思想。
在这个思想提出之后,国内外许多研究者都围绕着“自抗扰控制”展开实际工程应用的研究。
同时,自抗扰控制的理论分析的研究也在不断的深入。
1.3 自抗扰控制技术的特点和优点(1)自抗扰控制器采用“观测+补偿”的方法来处理控制系统中的非线性与不确定性,同时配合非线性的反馈方式,提高控制器的动态性能。
(2)自抗扰控制器算法简单、易于实现、精度高、速度快、抗扰能力强。
(3)统一处理确定系统和不确定系统的控制问题;扰动抑制不需外扰模型或者外扰是否观测;控制算法不需辨识控制对象;统一处理非线性和线性系统;可以进行时滞系统控制;解耦控制只要考虑静态耦合,不用考虑动态耦合等。
2.自抗扰控制技术提出的背景2.1 现代控制理论的缺点和改进现代控制理论以状态变量描述为基础,以状态反馈实现极点配置来改善全局动态特性的问题。
因而,此种控制的主要手段是状态反馈。
“这种全局控制方法需要知道关于开环动态特性的先验知识和状态变量的信息,这在许多工程实际中是很不现实的,因为工程实际提供不了有关开环动态特性的多少先念知识,因此这种全局控制方法是很难在实际中得到应用。
”这就是现代控制理论的缺点,这也限制了这种控制方法在工程实际中的应用。
自抗扰技术

缺点
误差的取法不合理。 没有合理提取误差微分的办法。 加权和不一定是最好的组合方式。 积分反馈有许多副作用。
从PID到自抗扰控制(ADRC)
安排合适的“过渡过程” 合理提取“微分”-“跟踪微分器”(Tracking Differentiator,TD); 探讨合适的组合方法-“非线性组合”(NF); 探讨扰动估计办法-“扩张状态观测器”(Extended State Observer,ESO)。
从PID到自抗扰控制(ADRC) 考察一阶误差系统:
.
.
w u
(2.6.1)
u k , k 0 ,则 对上式实施误差的线性反馈,
如果存在一常数 w0 0满足
k w,1 / 2(d 2 / dt ) k 2 w
w w0 ,1 / 2(d 2 / dt ) k ( w0 / k )
(2.4.16)
上式是很好的数值微分器,称作“快速离散跟踪微 分器”。把函数 fst ()中的变量 h 取成与步长 h 相互 独立的新变量 h0 ,得:
x1 (t h) x1 (t ) hx2 (t ) x2 (t h) x2 (t ) hfst ( x1 (t ) v(t ), x2 (t ), r , h0 )
(2.4.17)
h0 。 r 决定着跟踪速度,称作 上式有两个可调参数 r , “速度因子”;h0 起对噪声的滤波作用,称作“滤 波因子”。
从PID到自抗扰控制(ADRC) 在一般的控制系统中,误差直接取成:
ev y
(2.5.1)
误差的这种取法使初始误差很大,易引起“超调”, 很不合理。 改进:根据对象的承受能力,我们考虑先安排合理 的过渡过程v1 (t ) ,然后将误差取为:
自抗扰控制简介

u ( x1 , x2 ) r sign( x1
将式(3)代入式(2)可得:
x1 x2 x2 r sign( x 1 v0 (t )
x2 x2 ) 2r
(3)
x2 x2 2r
)
(4)
这个系统的解的分量
x1 (t )
在加速度
(7)
扩张状态观测器对被观测系统有较好的跟踪能力, 响应速度快, 估计精度高, 但是对总扰动的实时估计受到某些条件的限制。当外扰频率较高时,扩张状态观 测器对于总扰动的跟踪能力较差。
3.3 自抗扰控制律
在韩京清先生的《自抗扰控制技术》第五章中,介绍了改进过的非线性 PID 与由线性跟踪微分器以及状态观测器实现的“线性 PID”。并且谈及了为给定安 排过渡函数,以及按不同误差组合构成的“非线性 PID”。而之后的“自抗扰控 制器”是跟踪微分器和扩展状态观测器产生的状态变量估计之间的误差的非线 性组合,并且与扩张状态观测器对总扰动的补偿量一起组成控制量:
5
参考文献
[1] 韩京清. 控制理论—–模型论还是控制论 [J]. 系统科学与数学, 1989, 9(4): 328 – 335. [2] 韩京清. 线性控制系统的结构与反馈系统计算 [C] //全国控制理论 及其应用论文集. 北京: 科学出版社, 1981: 43 – 55. [3] 韩京清. 控制系统的鲁棒性与 Gö del 不完备性定理 [J]. 控制理论与 应用, 1999, 16(增刊): 149 – 155. [4] 韩京清. 抗扰控制技术—–估计补偿不确定因素的控制技术 [M]. 北 京: 国防工业出版社, 2008. [5] HAN Jingqing. From PID to active disturbance rejection control [J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900 – 906. [6]杨晟萱. 四旋翼飞行器自抗扰控制方法研究[D].大连理工大学,2014. [7]朱晓光. 航天器交会对接逼近段自抗扰控制研究[D].吉林大学,2015. [8]吴丹,赵彤,陈恳. 快速刀具伺服系统自抗扰控制的研究与实践[J]. 控制理论与 应用,2013,12:1534-1542. [9] 马幼捷 ,刘增高 , 周雪松 ,王新志 . 基于自抗扰控制技术的发电机励磁控制系统 [J]. 控制工程,2008,06:627-629+695. [10]TIAN G, GAO Z Q. Benchmark tests of active disturbance rejection control on an industrial motion control platform [C].Proceedings of the 2009 American Control Conference. St. Louis, MO: IEEE, 2009:5552 – 5557 [11] Achieve improved motion and efficiency for advanced motor control designs in minutes with TI’s new InstaSPIN(TM)–MOTION technology, The Wall Street Journal, April 18, 2013 at http: ///article/PR – CO – 20130418 – 907338.html ? mod = googlenews_wsj. [12] 李 海 生 , 朱 学 峰 . 自 抗 扰 控 制 器 参 数 整 定 与 优 化 方 法 研 究 [J]. 控 制 工 程 ,2004,11(5):419-423. [13] 张文革 . 时间尺度与自抗扰控制器 [D]. 北京 : 中国科学院系统科学研究 所 ,1999.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
NLSEF
根据fal函数的特点和现场运行经验适当地选择非线 性因子,将极大地改变控制效果,使比例、微分各 自发挥出各自的功效。
自抗扰控制技术简介
自抗扰控制技术的应用
自抗扰控制技术的应用
自抗扰控制技术提出多年以来,在国内 外已经得到了大量的应用。在美国,NASA空 间飞行器太阳能发电稳定装置;飞机喷气发 动机控制采用了自抗扰控制技术。在日本, 自抗扰控制技术也应用于高精度位移控制、 温度控制。在国内,电力系统、化工系统、 精密机械加工、军工系统等领域里也成功应 用了自抗扰控制技术。
自抗扰控制技术简介
自抗扰控制器的基本结构
ADRC的组成 非线性跟踪微分器 扩张状态观测器 非线性误差反馈控制律
ADRC结构框图
TD
跟踪微分器最常用的形式为
TD
fhan(z11,z12,r,h)为如下定义的非线性函数
ESO
设有未知外扰动的不确定对象
上式中 f(x,x,…,x(n-1),t)为未知函数,w(t)为未 知外扰,u为控制量,ESO的形式如下:
小 节
自抗扰控制器是对PID的改进,省去了积分环节, 增加了ESO以实现对系统内部模型摄动和外部扰动的 实时估计,并采用非线性误差状态反馈策略,保留 了PID控制的优点,克服了其控制精度低的缺陷。
在国内,大多数成果仍处于仿真或简单的实体实验 阶段,并且集中低阶系统模型的应用,对高阶系统 自抗扰控制器的阶数确定,高阶ESO的稳定性证明, 控制参数的整定于优化等方面还缺乏深入的研究。
自抗扰控制技术简介
自抗扰控制技术简介
PID控制及其优势和缺陷
PID控制
PID控制器在工业过程控 制中占据的主导地位是绝无仅 有的。目前,PID控制器在运 动控制、航天控制及其他过程 控制的应用中,仍然占据95% 以上。
PID控制
G.J.Silvs, A.Datta,S.P.Bhattacharyya. New results on Automatic Control, 2002,47(2):241-252.
自抗扰控制器是一种新型非线性控制器, 这种控制器基于非线性PID控制器发展而来, 结合了经典PID控制不依赖于对象精确模型的 优点及现代控制理论完善的控制系统分析方 法,并解决了经典PID控制快速性与超调之间 的矛盾以及现代控制理论依赖于控制对象模 型的局限,因此具有非常广阔的应用前景。 自抗扰控制器由跟踪微分器、扩张状态观测 器和非线性反馈控制规律三部分组成,它具 有不依赖于被控对象精确模型、动静态性能 良好、抗扰动能力强等优点。
从上文中可以看出,在纸浆和造纸工业中, PI控制器的应用甚至超过了98%。
PID控制
传统PID控制的结构如下图:
PID控制的优缺点
优势:
靠控制目标于实际行为之间的 误差来确定消除误差的策略。
“不用被控对象的精确模型,只用控制 目标与对象实际行为的误差来产生消除此误 差的控制策略的过程控制思想,是PID留给人 类的宝贵思想遗产,是PID控制技术的精髓。” 也正是因为这个原因,PID控制才能在控制工 程实践中得到广泛有效的应用。
自抗扰控制技术简介
自抗扰控制技术的特点和优点
自抗扰控制技术的特点和优点
自抗扰控制器采用“观测+补偿”的方法来处理 控制系统中的非线性与不确定性,同时配合非线性 的反馈方式,提高控制器的动态性能。
自抗扰控制器算法简单、易于实现、精度高、速 度快、抗扰能力强。 统一处理确定系统和不确定系统的控制问题;扰 动抑制不需外扰模型或者外扰是否观测;控制算法 不需辨识控制对象;统一处理非线性和线性系统; 可以进行时滞系统控制;解耦控制只要考虑静态耦 合,不用考虑动态耦合等。
自抗扰控制器 (Auto/ActiveDRC)技术,是发扬PID控制技术 的精髓并吸取现代控制理论的成就,运用计 算机仿真实验结果的归纳和总结和综合中探 索而来的,是不依赖被控对象精确模型的、 能够替代PID控制技术的、新型实用数字控制 技术。
PID控制的优缺点
缺陷:
直接以e=v-y的方式产生原始误差。控制目标v是 有可能产生突变的,而对象输出y一定是连续的,用 连续的缓变的变量追踪可能跳变的变量本身就是不 合理的。 误差的取法
产生e的微分信号没有太好的办法。 由误差e提取de/dt的办法 线性组合不一定是最好的组合方式。 “加权和”策略不一定最好。 误差信号e的积分反馈的引入有很多负作用。
自抗扰控制技术简介
克服PID“缺陷”的具体办法
克服PID“缺陷”的具体办法
(1)安排合适的“过渡过程”; (2)合理提取“微分——“跟踪微分器; (3)探讨合适的组合方法一“非线性 组合”; (4)探讨“扰动估计办法一“扩张状 态观测器”。
自抗扰控制技术简介
什么是自抗扰控制技术
什么是自抗扰控制技术
参考文献
[1]马幼捷,刘增高,周雪松,等.自抗扰控制器的原理 解析[J].天津理工大学学报,2008,24(4):27-30. [2]韩京清.从PID技术到“自抗扰控制”技术[J].控 制理论与应用,2002,19(4):485-491.
[3] 韩京清 . 自抗扰控制器及其应用 [J]. 控制与决 策,1998,13(1):19-23. [4]黄一 ,薛文超,赵春哲,自抗扰控制纵横谈 [J],系 统科学与数学,2011(9).
自抗扰控制技术简介
自抗扰控制技术的提出者
韩京清,朝鲜族, 1937生,系统与控制 专家,中国科学院数学与系统科学研究院系 统科学研究所研究员、博士生导师,长期从事 控制理论与应用研究工作,是我国控制理论 和应用早期开拓者之一。
韩京清先生于1998年正式提出自抗扰控 制这一思想。在这个思想提出之后,国内外 许多研究者都围绕着“自抗扰控制”展开实 际工程应用的研究。同时,自抗扰控制的理 论分析的研究也在不断的深入。