全景图拼接算法的设计与实现
全景图像拼接算法的研究与实现的开题报告
全景图像拼接算法的研究与实现的开题报告一、选题背景与意义全景图像拼接技术是近年来计算机视觉领域的研究热点之一。
全景图像拼接是指将多个单幅图像拼接成一个完整的全景图像。
在实际应用中,全景图像拼接技术已经被广泛应用于航拍、地图制作、虚拟现实等领域,为人们的工作和生活带来了巨大的便利。
全景图像拼接的主要难点在于如何准确地识别并匹配图像中的关键点,并将多个图像进行精准拼接,以实现衔接自然、无缝衔接、清晰高清的全景图像的创建。
因此,该选题的研究和实现对于推动计算机视觉技术的发展和广泛应用具有重要的意义和应用价值。
二、主要研究内容和技术路线本选题主要研究和实现如下内容:1. 了解和掌握全景图像拼接相关的基本理论和算法,包括图像特征提取、关键点匹配、图像变换、图像融合等。
2. 分析和比较国内外常见的全景图像拼接算法,探索算法的优缺点以及适用场景。
3. 针对实际情况,进一步优化和改进算法,提升全景图像拼接的精度和效率。
4. 实现和验证算法,并通过实验和评估验证算法的正确性和性能。
技术路线如下:1. 对全景图像拼接技术和相关理论进行深入学习和分析,梳理各种拼接算法的主要思路和优缺点。
2. 实现针对不同场景的全景图像拼接算法,并使用统一的评估指标进行实验和比较。
3. 对算法进行优化和改进,并进行实验对比。
4. 编写论文,撰写实验和算法实现的细节部分,并将论文中的理论和实验结果进行分析和总结。
三、预期成果1. 掌握全景图像拼接相关的基本理论和算法,包括图像特征提取、关键点匹配、图像变换、图像融合等。
2. 深刻理解国内外常见的全景图像拼接算法的优缺点和适用场景,并能在实际工作中针对不同场景选择合适的算法进行应用。
3. 实现和比较多种全景图像拼接算法,并掌握其实现细节和对各种因素的敏感性。
4. 对算法进行优化和改进,提升拼接效果和效率。
5. 发表相关论文,并在计算机视觉领域获得一定的学术成就和影响力。
四、可行性分析与计划进度本选题的可行性主要表现在以下几个方面:1. 实践基础扎实,具备计算机视觉、图像处理等方面的相关基础。
全景图像拼接技术

第6章全景图像的拼接技术全景图像(全景图)的拼接是指利用摄像机的平移或旋转得到的部分重叠的图像样本,生成一个较大的甚至360°的全方位图像的场景绘制方法。
换句话说,就是给定某个真实场景的一组局部图像,然后对这一组图像进行拼接,生成包含这组局部图像的新视图。
目前全景图像基本可分为柱面、球面、立方体等形式,以柱面和球面全景图最易实现而普遍采用。
本节主要介绍柱面和球面全景图像的拼接算法。
全景图的拼接一般有以下几个步骤。
(1)将从真实世界中拍摄的一组照片以一定方式投影到统一的空间面上,如立方体、圆柱体和球体表面等,这样这组照片就具有统一的参数空间坐标。
(2)在这个统一的空间对相邻图像进行比较,以确定可匹配的区域位置。
(3)将图像重叠区域进行融合处理,拼接成全景图。
在全景图的拼接中,一般都是根据图像序列中相邻两幅图像的重叠区域的相似性来实现的,有基于特征的方法和直接方法等。
本章将主要从基于特征的方法和直接方法两方面介绍柱面和球面全景图像的拼接算法技术。
6.1 柱面全景图像拼接技术本节分为两部分:第一部分是基于特征的拼接算法,这种算法主要从两幅图像中选择一系列特征,然后根据相似性原则进行图像间的特征匹配,这一部分介绍了基于特征点和特征块匹配的全景图像拼接算法;第二部分是基于相位相关拼接算法,这种方法是直接从图像的重叠区域对应像素灰度值出发考虑,利用所有可利用的数据实现很精准的匹配。
6.1.1基于特征的拼接算法1.基于特征点的拼接算法本节提出一种基于特征点匹配的柱面全景图像拼接算法。
首先将360°环绕拍摄的序列图像投影到柱面坐标系下:然后提取各图像的尺寸不变特征变换(Scale Invariant Feature Transform, SIFT)特征点,通过特征点匹配完成两幅图像的配准;再根据配准结果计算出图像间的变换参数;最后采用加权平均的融合方法对两幅图像进行无缝拼接。
1)柱面投影变换在进行柱面全景图的拼接过程中,为了保持实际场景中的空间约束关系和实际场景的视觉一致性,需将拍摄得到的反映各自投影平面的重叠图像序列映射到一个标准的柱面坐标空间上,即柱面投影,得到柱面图像序列,再进行拼接得到柱面全景图。
全景图拼接算法的设计与实现
・
收 稿 日期 :17 6 1 2 0 ~0 —2 3 基金项 目: 陕西理工学 院科研基金资助项 目(L Q 0 1 . SG D 6 )
作者简 介 : 杨刚(93 )男 , 17一 , 陕西洋县人 , r 硕士 , 讲师 , 主要从 事计算机 图形学及辅助设计研究 .
维普资讯
18 0
重 庆 工 学 院 学 报
于 寻找一个 办 法 , 得 图像 之 间相 互 重 叠 的 部 分 使 对准 , 图像 整合 , 即 然后再 “ 合 ” 缝 成一 个 新 的更 大 画面 的视 图( 图 1. 如 ) 图像 整合 的前提 是寻 找这组
种办法是 求 2块 面积 的对 应 像素 点灰 度 值差 相对 于灰度值 和 的大小 . 较好 的办 法是 求 2块 面积 的对应 像 素点 灰度
1 相关基本概念
给定某个场景 的一组互相重叠 的局部图像,
生成 1 ห้องสมุดไป่ตู้包含 这组 具有 相 同视 点但 不 同视 角 的局
方法为基础 , 着重研究 了圆柱面全景图中图像拼
接 的问题 .
部图像的新的较大 的视 图, 这个过程称为图像的
拼接 问题 , 也称之 为 图像 镶嵌 [ 该 问题 的核 心在 ¨.
性.
关
键
词: 全景 图; 图像拼接 ; 模板 匹配 文献标识码 : A 文章编号 :6 1 9 2 0 )9 17 4 17 —0 (0r 0 ~00 —0 7
中圄分类号 :P9 T31
De in n m p e e t to fPa o a i ma e M o a cAl o ih sg a d I lm n a in o n r m c I g s i g rt m
全景图像拼接技术研究及应用
全景图像拼接技术研究及应用近几年,全景图像(Panorama)的应用越来越广泛,如旅游景点展示、地图制作、VR(虚拟现实)和AR(增强现实)等应用。
全景图像拼接技术是实现全景图像的关键技术,其主要目标是将多幅重叠的图像拼接为无缝的全景图像。
本文将着重探讨全景图像拼接技术的研究现状和应用。
一、全景图像拼接技术的研究现状1. 传统方法传统的全景图像拼接方法主要包括两种:基于特征点法和基于区域分割法。
前者是将所有图像的特征点匹配,并基于配对点拼接成全景图像;后者则是通过图像的最大重叠区域来进行拼接,适用于图像没有重大的形变或视角变化等情况。
这两种方法的缺点都是易受噪声和遮挡等问题的影响,导致拼接的效果不理想。
2. 基于深度学习的方法近年来,深度学习技术的崛起对于全景图像拼接技术的提升也起到了重要的作用。
通过使用卷积神经网络(Convolutional Neural Networks, CNN),可以提高全景图像拼接的效率和准确性。
2016年,百度提出了一种名为“DeepPano”的深度学习全景图像拼接算法,该方法利用神经网络从大量单张图像中学习特征和相机参数。
与传统方法相比,DeepPano算法具有更高的拼接速度和更好的拼接质量。
3. 基于视频的方法基于视频的全景图像拼接技术最近也引起了广泛的关注。
与多张照片的拼接不同,视频是连续的图像序列,具有更多的信息和上下文。
基于视频的全景图像拼接方法可以通过视频的连续性进一步提高拼接效果。
二、全景图像拼接技术的应用1. 地图制作全景图像拼接技术在地图制作上有广泛的应用。
通过利用卫星遥感图像、无人机摄影图像等数据源,可以快速生成高质量的地图制品,研究人员还利用全景图像拼接技术在地图中嵌入了VR功能,以帮助用户更好地了解地理信息。
2. 旅游景点展示全景图像拼接技术在旅游景点展示上也有广泛的应用。
通过拍摄景区周围的多张照片,将其拼接成一张完整的全景图像,游客可以更好地了解景区的地形、景观等信息。
航空照相机的全景图像拼接技术
航空照相机的全景图像拼接技术随着无人机技术的快速发展,航空照相机作为无人机上的重要组成部分,越来越被广泛应用于航空摄影、地理测绘、农业科学等领域。
而其中一项关键技术——航空照相机的全景图像拼接技术,则成为了许多专业摄影师和测绘工作者所关注和探索的重点。
全景图像拼接技术是指将多幅局部重叠的照片通过计算机算法进行自动拼接,生成一幅无缝衔接的大尺寸全景图像的过程。
这项技术的发展,使得我们可以更好地捕捉和保存大范围的景观,更准确地记录和表达真实世界的细节和信息。
航空照相机的全景图像拼接技术的关键在于如何实现照片之间的准确定位和重叠区域的自动识别。
在航空摄影中,由于无人机在拍摄过程中会发生姿态变化和高度变化,这就造成了照片之间的尺度差异和视角变化,在进行图像拼接时增加了一定的难度。
为了解决这一问题,研究人员提出了多种算法和方法。
其中,图像特征点匹配是一种常用的方法。
该方法通过寻找图像中的关键点,并计算关键点的描述子,然后通过匹配关键点和描述子来找到对应的点,从而实现图像的对齐和融合。
此外,还可以利用传感器数据、GPS信息和惯性导航系统等,提高航空照相机姿态、位姿的估计精度,进一步优化图像拼接的结果。
除了关键点匹配,多图像融合算法也是实现航空照相机全景图像拼接的重要手段之一。
该算法通过对多幅图像进行颜色、亮度、对比度等方面的调整,使得图像在拼接后具有一致的外观。
同时,还可以采用多重融合方法,将不同的图像特征和信息进行优化和融合,从而得到更准确的全景图像。
除了技术点的研究,航空照相机全景图像拼接技术的发展还需要考虑到实际应用中的需求和使用场景。
例如,对于航空摄影来说,拼接后的全景图像对于地理测绘、城市规划、农业科学等领域的应用至关重要。
因此,算法的稳定性、拼接效果的准确性和高效性等方面都需要进行综合考虑。
此外,在航空照相机全景图像拼接技术的研究和应用过程中,还需要关注数据的存储和处理。
航空照片的体积通常很大,因此如何高效地存储、传输和处理这些数据,也是一个需要解决的问题。
360全景拼接方案

360全景拼接方案简介360全景拼接是一种将多张图片拼接为一个全景图的技术。
全景图能够提供用户全方位的视角,使得用户能够沉浸在虚拟现实的环境中。
本文将介绍一种基于计算机视觉的360全景拼接方案,通过使用特征匹配和图像融合算法,实现高质量的全景拼接效果。
基本原理特征匹配全景拼接的第一步是特征匹配。
特征匹配是指找到多张图片中的相同特征点,以便后续的图像对齐和拼接。
常用的特征点提取算法有SIFT(尺度不变特征变换)和SURF(加速稳健特征)。
这些算法可以提取出图像中的关键点,并计算出每个关键点的描述子。
在特征点提取完成后,可以通过计算特征点之间的距离和相似度,使用一些匹配算法(如k-最近邻算法)来找到相同特征点。
匹配算法会根据两幅图像中特征点的相似程度,将它们匹配成对。
图像对齐在特征匹配完成后,下一步是图像对齐。
图像对齐是指将所有图像对准到同一个坐标系中,以便进行后续的拼接处理。
图像对齐可以通过估计图像的变换矩阵来实现,常见的变换矩阵包括平移、旋转和缩放。
常用的图像对齐算法有RANSAC(随机抽样一致性)和LMS(最小均方误差),这些算法可以根据匹配的特征点,计算出变换矩阵,并将图像对齐到同一个坐标系中。
图像融合图像对齐完成后,下一步是图像融合。
图像融合是指将所有对齐后的图像拼接在一起,生成最终的全景图。
常用的图像融合算法有平均融合、线性融合和多重分辨率融合。
在图像融合过程中,需要考虑图像之间的重叠区域的处理,以及消除不同图像之间的亮度差异。
这可以通过调整图像的透明度、亮度和对比度来实现。
实施步骤下面是基于上述原理的360全景拼接方案的实施步骤:1.选择合适的特征提取算法,如SIFT或SURF。
根据实际需求,确定特征点的数量和质量。
2.对每张图片进行特征提取,并计算每个特征点的描述子。
3.使用匹配算法(如k-最近邻算法),找到特征点之间的对应关系。
4.根据匹配结果,计算变换矩阵,将所有图像对齐到同一个坐标系中。
全景图像拼接
实验目的:图像拼接的目的是将有衔接重叠的图像拼成一张高分辨率全景图像,它是计算机视觉、图像处理和计算机图形学等多学科的综合应用技术。
图像拼接技术是指将对同一场景、不同角度之间存在相互重叠的图像序列进行图像配准,然后再把图像融合成一张包含各图像信息的高清图像的技术。
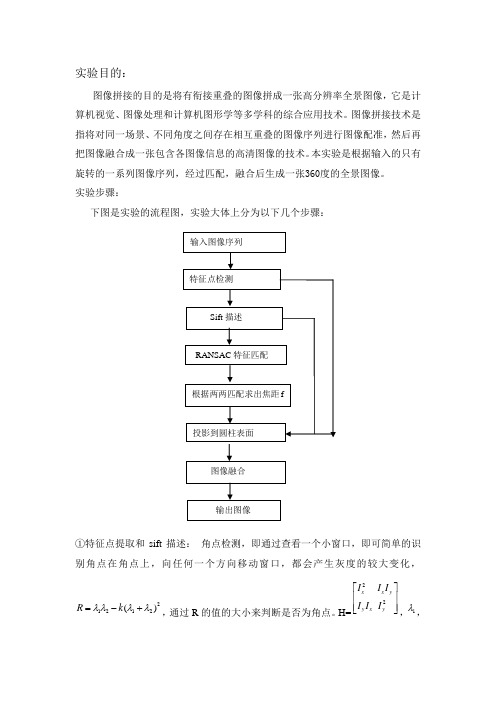
本实验是根据输入的只有旋转的一系列图像序列,经过匹配,融合后生成一张360度的全景图像。
实验步骤:下图是实验的流程图,实验大体上分为以下几个步骤:①特征点提取和sift 描述: 角点检测,即通过查看一个小窗口,即可简单的识别角点在角点上,向任何一个方向移动窗口,都会产生灰度的较大变化,21212()R k λλλλ=-+,通过R 的值的大小来判断是否为角点。
H=22x x y y x y I I I I I I ⎡⎤⎢⎥⎢⎥⎣⎦,1λ,输入图像序列 特征点检测 Sift 描述RANSAC 特征匹配根据两两匹配求出焦距f投影到圆柱表面图像融合输出图像为矩阵的两个特征值。
实验中的SIFT描述子是对每个角点周围进行4个区域2进行描述,分别是上下左右四个区域,每个方块大小为5*5,然后对每个方块的每个点求其梯度方向。
SIFT方向共有8个方向,将每个点的梯度方向做统计,最后归为8个方向中的一个,得到分别得到sift(k,0),sift(k,1)···sift(k,8),k为方块序列,0-8为方向,共有四个方块,所以生成32维的向量,然后按幅值大小对这32维向量进行排序,并找出最大的作为主方向。
图为角点检测和sift描述后的图②.如果直接根据描述子32维向量进行匹配的话,因为噪声的影响,角点检测的不准确,会导致找出一些错误的匹配对,如何去掉这些错误的匹配呢?RANSAC算法是基于特征的图像配准算法中的典型算法,其优点是:可靠、稳定、精度高,对图像噪声和特征点提取不准确,有强健的承受能力,鲁棒性强,并且具有较好的剔出误匹配点的能力,经常被使用在图像特征匹配中。
Python实现图像全景拼接

Python 实现图像全景拼接⽬标:将数张有重叠部分的图像通过特征点检测,匹配,图像变换拼成⼀幅⽆缝的全景图或⾼分辨率图像在图像拼接中⾸先利⽤SIFT 算法提取图像特征进⽽进⾏特征匹配,继⽽使⽤RANSAC 算法对特征匹配的结果进⾏优化,接着利⽤图像变换结构进⾏图像映射,最终进⾏图像融合。
在图像拼接过程中,运⽤SIFT 局部描述算⼦检测图像中的关键点和特征,SIFT 特征是基于物体上的⼀些局部外观的兴趣点⽽与影像的⼤⼩和旋转⽆关。
对于光线、噪声、些微视⾓改变的容忍度也相当⾼,所以⽤来检测要拼接图像的特征及关键点就很有优势。
⽽接下来即步骤三是找到重叠的图⽚部分,连接所有图⽚之后就可以形成⼀个基本的全景图了。
匹配图⽚最常⽤的⽅式是采⽤RANSAC (RANdom SAmple Consensus, 随机抽样⼀致),⽤此排除掉不符合⼤部分⼏何变换的匹配。
之后利⽤这些匹配的点来估算单应矩阵”(Homography Estimation ),也就是将其中⼀张图像通过关联性和另⼀张匹配。
使⽤的算法:1. 利⽤SIFT ⽅法检测特征点2. 将检测到的特征点进⾏匹配def detectAndDescribe(image):# 将彩⾊图⽚转换成灰度图gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)# 建⽴SIFT ⽣成器descriptor = cv2.xfeatures2d.SIFT_create()# 检测SIFT 特征点,并计算描述⼦(kps, features) = descriptor.detectAndCompute(image, None)# 将结果转换成NumPy 数组kps = np.float32([kp.pt for kp in kps])# 返回特征点集,及对应的描述特征return (kps, features)def matchKeypoints(kpsA, kpsB, featuresA, featuresB, ratio, reprojThresh):# 建⽴暴⼒匹配器matcher = cv2.BFMatcher()# 使⽤KNN 检测来⾃A 、B 图的SIFT 特征匹配对,K=2rawMatches = matcher.knnMatch(featuresA, featuresB, 2)3.将匹配的特征点可视化4. 图像拼接matches = []for m in rawMatches:# 当最近距离跟次近距离的⽐值⼩于ratio 值时,保留此匹配对if len(m) == 2 and m[0].distance < m[1].distance * ratio:# 存储两个点在featuresA, featuresB 中的索引值matches.append((m[0].trainIdx, m[0].queryIdx))# 当筛选后的匹配对⼤于4时,计算视⾓变换矩阵if len(matches) > 4:# 获取匹配对的点坐标ptsA = np.float32([kpsA[i] for (_, i) in matches])ptsB = np.float32([kpsB[i] for (i, _) in matches])# 计算视⾓变换矩阵(H, status) = cv2.findHomography(ptsA, ptsB, cv2.RANSAC, reprojThresh)# 返回结果return (matches, H, status)# 如果匹配对⼩于4时,返回Nonereturn Nonedef drawMatches(imageA, imageB, kpsA, kpsB, matches, status):# 初始化可视化图⽚,将A 、B 图左右连接到⼀起(hA, wA) = imageA.shape[:2](hB, wB) = imageB.shape[:2]vis = np.zeros((max(hA, hB), wA + wB, 3), dtype="uint8")vis[0:hA, 0:wA] = imageAvis[0:hB, wA:] = imageB# 联合遍历,画出匹配对for ((trainIdx, queryIdx), s) in zip(matches, status):# 当点对匹配成功时,画到可视化图上if s == 1:# 画出匹配对ptA = (int(kpsA[queryIdx][0]), int(kpsA[queryIdx][1]))ptB = (int(kpsB[trainIdx][0]) + wA, int(kpsB[trainIdx][1]))cv2.line(vis, ptA, ptB, (0, 255, 0), 1)# 返回可视化结果return visdef stitch(images, ratio=0.75, reprojThresh=4.0,showMatches=False):#获取输⼊图⽚(imageB, imageA) = images#检测A 、B 图⽚的SIFT 关键特征点,并计算特征描述⼦(kpsA, featuresA) = detectAndDescribe(imageA)(kpsB, featuresB) = detectAndDescribe(imageB)# 匹配两张图⽚的所有特征点,返回匹配结果M = matchKeypoints(kpsA, kpsB, featuresA, featuresB, ratio, reprojThresh)# 如果返回结果为空,没有匹配成功的特征点,退出算法if M is None:return None# 否则,提取匹配结果# H是3x3视⾓变换矩阵(matches, H, status) = M# 将图⽚A进⾏视⾓变换,result是变换后图⽚result = cv2.warpPerspective(imageA, H, (imageA.shape[1] + imageB.shape[1], imageA.shape[0])) cv_show('result', result)# 将图⽚B传⼊result图⽚最左端result[0:imageB.shape[0], 0:imageB.shape[1]] = imageBcv_show('result', result)# 检测是否需要显⽰图⽚匹配if showMatches:# ⽣成匹配图⽚vis = drawMatches(imageA, imageB, kpsA, kpsB, matches, status)# 返回结果return (result, vis)# 返回匹配结果return result。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
当以 2 块面积像素点灰度值的差别作为判别 标准时, 最简单的一种方法是直接把各点灰度差 累计起来. 这种 办法效 果不是 很好, 常常 由于亮 度、对比度的变化及其它原因导致拼接失败. 另一
种办法是求 2 块面积的对应像素点灰度值差相对 于灰度值和的大小.
较好的办法是求 2 块面积的对应像素点灰度 值的相关系数. 相关系数越大, 则 2 块图像的匹配 程度越高. 该方法的拼接效果要好一些, 成功率有 所提高.
且当 比 值
TH TW
n=
1m =
[
1
Is (
n,
m) ]
2
为常数时
TH T W
n = 1m=
[
1
IT(
n,
m)]
2
R ( i , j ) 取极大值( = 1) .
由以上各式可知, 模板 T 在匹配图 M 中按像
素逐点搜索, 逐点计算子图强度 Is 、模板强度 It 、
子图与模板互相关强度 Is It , 然后计算相似度,
第 21 卷 第 9 期 Vol. 21 No. 9
计算机与信息技术
重 庆 工 学 院 学 报( 自然科学版)
Journal of Chongqing Institute of Technology( Natural Science Edition)
2007 年 9 月 Sep. 2007
全景图拼接算法的设计与实现
杨刚
( 陕西理工学院 计算机科学与技术系, 陕 西 汉中 723003)
摘要: 研究了全景图生成过程中相关图片拼接的问题. 探讨了通常的 2 种图像 拼接算法 及其优缺
点, 在定义匹配图、包含图 和模板图的基础上, 提出了一个基于模板匹 配的全景图 拼接算法, 引入
标准相 似度实现模板匹配, 在 Visual C+ + 6. 0 环境中 编程实现图片的拼接 , 并验证 了算法的正确
全景图是一种具 有全视域和高分辨的图像, 在机器人技术、计算机视觉、虚拟现实方面有着广 泛的应用. 通过图像拼接方法将普通相机拍摄的 序列图像进行自动拼接, 是目前构造全景图最常 用的方法. 本文中以这种最常用的构造全景图的 方法为基础, 着重研究了圆柱面全景图中图像拼 接的问题.
1 相关基本概念
给定某个场景的一组互相重叠的局部图像, 生成 1 幅包含这组具有相同视点但不同视角的局 部图像的新的较大的视图, 这个过程称为 图像的 拼接问题, 也称之为图像镶嵌[ 1] . 该问题的核心在
基于面积的图像拼接算法的优点是简单且适 应性强; 缺点是速度较慢, 且要求待拼接的 2 图像 亮度、对比度等差别不能太大. 2. 2 基于特征的图像拼接算法
基于特征的图像拼接算法是由像素点的灰度 值信息提取图像特征, 然后以图像特征为标准, 对 图像重叠部分的对应特征区域进行拼接. 该算法 能提高拼接速度, 抗干扰能力较强, 但是需要对图 像进行预处理以判断并提取特征区域, 因 而较繁 琐. 此外, 如果特 征集是由点或线构成, 虽 然会大 幅提高拼 接速 度, 但 却与场 景相关, 反 而不便 实 现.
for ( n = 0; n < TH ; n+ + )
{
for( m = 0; m < TW ; m+ + )
{
/ / 计 算 [ Is( n, m) ] 2 和 Is
( n, m) It( n, m)
} } / / 计算相似性 R = dSigmaST / ( sqrt ( dSigmaS) * sqrt ( dSigmaT) ) ; if ( R > MaxR) {
模板匹配[ 3] 是指预先给定已知类的标准模式
Cw , 当输入某个模式 x 时, 判别输入模式与标准模 式中哪一个最接近. 距离可以用作衡量其接近程 度的尺度. 若采用 Euclid 距离, 则 dw ( x ) = x Cw . 距离最小的那个输入模式被识别为属于类.
考虑到当输入模式相同, 但其灰度值不同时, x 与 Cw 的距离也就不同, 因此用标准相似度 sw ( x ) 衡
}
}
/ / 找到图像中最大相似性的出现位置
for ( j= 0; j< H- TH+ 1; j+ + )
{
for( i= 0; i < W- TW + 1; i+ + )
{
dSigmaST = 0; / /
Is( n, m) It ( n,
m)
dSigmaS = 0; / / [ Is( n, m) ] 2
2
n=
1m=
I
1
s
(
n,
m)
IT(
n,
m)+
TH TW
[
n= 1m= 1
IT ( n,
m) ] 2
其中: 第 1 项表示子图 Si , j 的强度, 它随( i , j ) 缓慢
变化; 第 2 项是子变; 第 3 项表示模板的总强度, 是 1 个与( i , j ) 无关
图像拼接是基于图像的虚拟现实系统中建立 高度真实感场景的一种基 本方法. 拼接是全景图 生成技术中最关键的一步. 由于在图像采集过程 中相机没有发生大的偏斜 和俯仰, 所以在采集到 的图像中, 相邻图像间旋转、仿射、透视的关系并 不明显, 且主要是平移关系. 这样就要求柱面全景 图拼接算法首先要能解决计算相邻图像间平移参 数这一关键性问题, 其次还要能对旋 转、仿射、透 视的影响以及使用普通相机拍摄图像时产生的边 缘失真现象加以处理, 从而达到无缝拼接的目的. 图 1 为柱面全景图像拼接示意图.
( Department of Computer, Shaanx i University of T echnology, Hanzhong 723003, China)
Abstract: This paper studies the quest ion of relative image mosaic in the process of creating panoramic images, and discusses the advantage and disadvantage of two common image mosaic algorithms. By defining mat ching image, containing image, and template image, this paper presents a panoramic image mosaic a-l gorithm based on template matching, and introduces a standard analogue degree to finish template matching. Finally the results show that the algorithm is correct through programming to complete image mosaic in the environment of the Visual C+ + 6. 0. Key words: panoramic image; image mosaic; template matching
性.
关 键 词: 全景图; 图像拼接; 模板匹配
中图分 类号:TP391
文献 标识码: A
文章编号: 1671- 0924( 2007) 09- 0107- 04
Design and Implementation of Panoramic Image Mosaic Algorithm
YANG Gang
杨 刚: 全景图拼接算法的设计与实现
109
述为: Step1: 划定模板图; Step2: 在匹 配图中设定搜 索范围, 找出与模
板图具有最大相似性的位置; Step3: 调入 包含图, 根 据最大相似 位置无缝
拼接. 在拼接算法 中, 计 算时间消 耗最大的 是第 2
步, 即模板匹配.
图 2 匹配图、包含图和模板图( 虚线框所示)
1 10
重庆工学院学报
for ( n = 0; n < TH; n+ + ) {
for( m = 0; m < TW ; m+ + ) { / / 计算 dSigmaT ( [ It ( n, m) ] 2)
于面积的图像拼接方法和基于特征的图像拼接方 法, 在基于面积的图像拼接算法的基础上 提出一 个基于模板匹配的全景图拼接算法, 并对 此算法 进行了研究和讨论. 最后在 Visual C+ + 6. 0 环境下 编程对此算法进行了验证.
收稿日期: 2007- 06- 21 基金项目: 陕西理工学院科研基金资助项目( SLGQD061) . 作者简介: 杨刚( 1973 ) , 男, 陕西洋县人, 硕士, 讲师, 主要 从事计算机图形学及辅助设计研究.
1 08
重庆工学院学报
于寻找一个办法, 使得图像之间相互重叠的部分 对准, 即图像整合, 然后再 缝合 成一个新的更大 画面的视图( 如图 1) . 图像整合的前提是寻找这组 图像相互间的变换关系, 包括仿射变换和平面透 视变换.
直到 找 出 最 大 相 似 度 为 止, 最 后 输 出 参 考 点