自动控制原理_第5章习题解答-
《自动控制原理》5章课后习题参考答案.

+
1(
10000(6
.311
2e +=
S S S G
1001.0(11.0(1(1.0(d +++=
S S S S S G 61
.054
.0154.0,
11(2
2
=+==+=
K K
A ω
ωω010
s
900.257.3180 2.16rad
tg ωωω----∙︒=-=,(
(
5
.1,
(5
(6 (7
5.12
K增大和T减少
((1(1(1m K
K s s Ts Ts K
s T s K
Φ=
≈
+++++
K
T m 21=
ζ ,不变(稳定裕度不变
2
22
(12(121b n ωωξξ=-+
-+
5.13
11=+=
p
ssr K e 35
.01
12
416==
=
v
ssr K e %
8.4%100%2
1=⨯=--ξ
πξ
σe 05
.006.13
==≈
ቤተ መጻሕፍቲ ባይዱεξ
ω,S t n s s
rad n n c 8.2707.0707.02=∙=ωωω=0
63
=γdB K g s rad g ∞=∞=ω0,1==r r M ωs
rad n b 4==ωω0
1
1
11006
.787.53.841001.01001.0180180=-=∙-=-+-=----tg
《自动控制原理》 胡寿松第五章习题解答

= 0.447 sin(t + 3.4 0 ) − 0.354 cos(2t − 90 0 )
e ss (t ) = c ss (t ) − r (t ) = 0.447 sin(t + 3.4 0 ) − 0.354 cos(2t − 90 0 ) − sin(t + 30 0 ) + cos(2t − 45 0 )
5-4 典型二阶系统的开环传递函数
2 ωn s( s + 2ζω n )
G( s) =
当取 r (t ) = 2 sin t 时,系统的稳态输出
css (t ) = 2 sin(t − 450 )
试确定系统参数 ω n , ζ 。 解:根据公式(5-16)和公式(5-17) 得到: c ss (t ) = A G B ( jω ) sin(ωt + ϕ + ∠G B ( jω ))
ξ = 0.6532
G( s) H ( s) =
K (τs + 1) ; s 2 (Ts + 1)
K ,τ , T > 0
试分析并绘制 τ > T 和 T > τ 情况下的概略开环幅相曲线。 解:相频特性为
ϕ (ω ) = −180 0 + arctan τω − arctan Tω
(1)
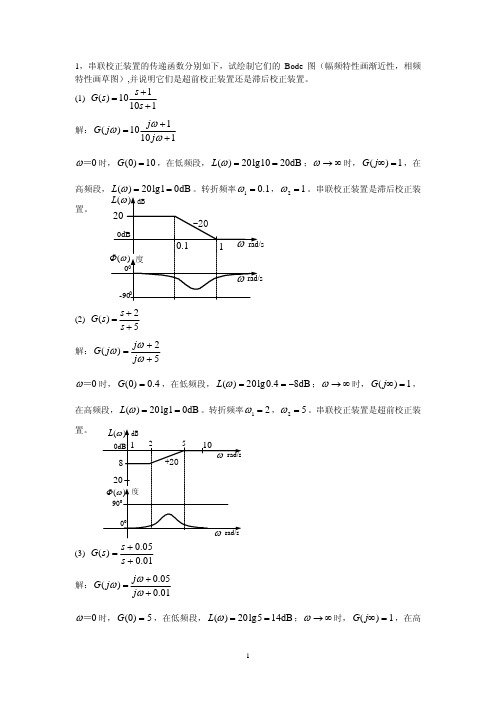
τ > T 时, ϕ (ω ) > −180 0 概略开环幅相曲线如下
胡寿松自动控制原理习题解答第五章
5-2 若系统单位阶跃响应为
h(t ) = 1 − 1.8e −4t + 0.8e −9t (t ≥ 0)
试确定系统的频率特性。 解:对单位阶跃响应取拉氏变换得:
1 1.8 0.8 36 − + = s s + 4 s + 9 s ( s + 4)( s + 9)
自动控制原理第五章课后答案

五 频域分析法2-5-1 系统单位阶跃输入下的输出)0(8.08.11)(94≥+-=--t e e t c tt ,求系统的频率特性表达式。
【解】: 98.048.11)]([L )(1+++-==-s s s t c s C 闭环传递函数)9)(4(36198.048.11)()()(++=+++-==s s ss s s s R s C s G )9tg 4(tg 2211811636)9)(4(36)(ωωωωωωω--+-+⨯+=++=j ej j j G2-5-2系统时,系统的稳态输出(1))30sin()(0+=t t r ; (2))452cos(2)(0+=t t r ;(3))452cos(2)30sin()(00--+=t t t r 。
【解】:求系统闭环传递函数5tg 21254)5(4)(54)(1)()()()(14)(ωωωω--+=+=+=+==+=j B K K B K ej j G s s G s G s R s C s G s s G根据频率特性的定义,以及线性系统的迭加性求解如下:(1)︒===30,1,11θωr A︒--====-3.1151tg )1(178.0264)1()(1j j j B e eeA j G θωω[])7.18sin(78.0)1(sin )1()sin()(12︒+=++=+=t t A A t A t c r c s θθθ(2)︒===45,2,21θωr A︒--==+=-8.2152tg 274.02544)(1j j B e ej G ωω)2.232cos(48.1)(︒+=t t c s(3))8.662cos(48.1)7.18sin(78.0)(︒--︒+=t t t c s2-5-3 试求图2-5-3所示网络的频率特性,并绘制其幅相频率特性曲线。
【解】:(1)网络的频率特性1)(111)(212212+++=+++=ωωωωωC R R j C jR C j R R C j R j G(2)绘制频率特性曲线)tg (tg 22212121111)(1)(11)(ωωωωωωωT T j eT T jT jT j G ---++=++= 其中1221221,)(,T T C R R T C R T >+==。
自动控制原理及其应用课后习题第五章答案
ω
20 0 -20
10 ωc
1
2 -20dB/dec
ω
-60dB/dec
10 ≈1 ω2 0.5 c
ω c=4.5
5 ≈1 ω c=7.9 ω 0.01 c3
第五章习题课 (5-17)
-20
低频段曲线: 低频段曲线: 20lgK=20dB φ (ω ) 0 ω1=5 ω2=15 -90 相频特性曲线: 相频特性曲线: -180 -270 φ ( )= -90o ω ω=0 φ ( )= -270o ω ω=∞
-60dB/dec
ω
第五章习题课 (5-2)
10(s+0.2) 1.33(5s+1) (5) G(s)= s2(s+0.1)(s+15)=s2(10s+1)(0.67s+1) 解: 低频段曲线: 低频段曲线: 20lgK=2.5dB
第五章习题课 (5-7)
5-7 已知奈氏曲线,p为不稳定极点个数, 已知奈氏曲线, 为不稳定极点个数 为不稳定极点个数, υ为积分环节个数,试判别系统稳定性。 为积分环节个数,试判别系统稳定性。 Im υ=2 (b) p=0 (a) p=0 Im υ=0
ω=0 Re -1 0 ω=0+ -1 0 ω=0 Re
第五章习题课 (5-1)
5-1(1) 已知单位负反馈系统开环传递函数, 已知单位负反馈系统开环传递函数, 当输入信号r(t)=sin(t+30o),试求系统的稳态 当输入信号 , 输出。 输出。 10 G(s)=(s+1) 10 解: φ(s)= (s+11) 10 = 10 = 10 ω A( )= 2 2 112+1√ 122 =0.905 √ 11 +( ) √ ω φ ( )=-tg-1ω =-tg-1 1 =-5.2o ω 11 11 cs(t)=0.9sin(t+24.8o)
自动控制原理卢京潮主编课后习题答案西北工业大学出版社

自动控制原理卢京潮主编课后习题答案西北工业大学出版社SANY标准化小组 #QS8QHH-HHGX8Q8-GNHHJ8-HHMHGN#第五章 线性系统的频域分析与校正习题与解答5-1 试求题5-75图(a)、(b)网络的频率特性。
(a) (b)图5-75 R-C 网络解 (a)依图:⎪⎪⎪⎩⎪⎪⎪⎨⎧+==+=++=++=2121111212111111221)1(11)()(R R C R R T C R RR R K s T s K sC R sC R R R s U s U r c ττ (b)依图:⎩⎨⎧+==++=+++=C R R T CR s T s sCR R sC R s U s U r c)(1111)()(2122222212ττ 5-2 某系统结构图如题5-76图所示,试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出)(t c s 和稳态误差)(t e s(1) t t r 2sin )(=(2) )452cos(2)30sin()(︒--︒+=t t t r 解 系统闭环传递函数为: 21)(+=Φs s 图5-76 系统结构图 频率特性: 2244221)(ωωωωω+-++=+=Φj j j 幅频特性: 241)(ωω+=Φj相频特性: )2arctan()(ωωϕ-=系统误差传递函数: ,21)(11)(++=+=Φs s s G s e 则 )2arctan(arctan )(,41)(22ωωωϕωωω-=++=Φj j e e(1)当t t r 2sin )(=时, 2=ω,r m =1则 ,35.081)(2==Φ=ωωj 45)22arctan()2(-=-=j ϕ (2) 当 )452cos(2)30sin()(︒--︒+=t t t r 时: ⎩⎨⎧====2,21,12211m m r r ωω5-3 若系统单位阶跃响应 试求系统频率特性。
自动控制原理第五章课后习题答案(免费)[1]
![自动控制原理第五章课后习题答案(免费)[1]](https://img.taocdn.com/s3/m/11139471f46527d3250ce001.png)
自动控制原理第五章课后习题答案(免费)5-1设单位反馈系统的开环传递函数为对系统进行串联校正,满足开环增益 及 解:① 首先确定开环增益K,00()12lim v s K SG S k →===② 未校正系统开环传函为:012()(1)G s s s =+M a g n i t u d e (d B )1010101010P h a s e (d e g )Bode DiagramGm = 70.5 dB (at 200 rad/sec) , P m = 16.5 deg (at 3.39 rad/sec)Frequency (rad/sec)③ 绘制未校正系统的开环对数频率特性,得到幅穿频率 3.4c ω=,对应相位角'0()164,16c G j ωγ∠=-∴=,采用超前校正装置,最大相角 0(180())4016630m c G j ϕγωγ=-+∠+=-+=④ 11sin ,31m αϕαα--=∴=+ 0()(1)KG s s s =+40γ=︒112K s -=⑤ 在已绘图上找出10lg 10lg3 4.77α-=-=-的频率 4.4m ω=弧度/秒 令c m ωω=⑥0.128/,0.385/m T s T s ωα=⇒==∴=校正装置的传函为:110.385()110.128Ts s G s Ts s α++==++校正后的开环传函为:012(10.39)()()()(1)(10.13)c s G s G s G s s s s +==++ 校正后1801374340γ=-=>,满足指标要求.-100-50050100M a g n i t u d e (d B )101010101010P h a s e (d e g )Bode DiagramGm = 99.2 dB (at 1.82e+003 rad/sec) , P m = 42.4 deg (at 4.53 rad/sec)Frequency (rad/sec)5-2设单位反馈系统的开环传递函数为要求 设计串联迟后校正装置。
自动控制原理课后习题答案第五章

第 五 章5-2 若系统单位阶跃响应为49()1 1.80.8tth t ee--=-+试确定系统的频率特性。
分析 先求出系统传递函数,用j ω替换s 即可得到频率特性。
解:从()h t 中可求得:(0)0,(0)0h h '==在零初始条件下,系统输出的拉普拉斯变换()H s 与系统输出的拉普拉斯变换()R s 之间的关系为()()()H s s R s =Φ⋅即()()()H s s R s Φ=其中()s Φ为系统的传递函数,又1 1.80.836()[()]49(4)(9)H s L h t s s s s s s ==-+=++++1()[()]R s L r t s ==则()36()()(4)(9)H s s R s s s Φ==++令s j ω=,则系统的频率特性为()36()()(4)(9)H j j R j j j ωωωωωΦ==++5-7 已知系统开环传递函数为)1s T (s )1s T (K )s (G 12++-=;(K、T1、T2>0)当取ω=1时, o180)j (G -=ω∠,|G(jω)|=0.5。
当输入为单位速度信号时,系统的稳态误差为0.1,试写出系统开环频率特性表达式G(jω)。
分析:根据系统幅频和相频特性的表达式,代入已知条件,即可确定相应参数。
解: 由题意知:()G j ω=21()90arctan arctan G j T T ωωω∠=---因为该系统为Ⅰ型系统,且输入为单位速度信号时,系统的稳态误差为0.1,即1()lim ()0.1ss s e E s K→∞===所以:10K =当1ω=时,(1)0.5G j ==21(1)90arctan arctan 180G j T T ∠=---=-由上两式可求得1220,0.05T T ==,因此10(0.051)()(201)j G j j j ωωωω-+=+5-14 已知下列系统开环传递函数(参数K 、T 、T i>0,i=1,2,…,6)(1))1s T )(1s T )(1s T (K)s (G 321+++=(2))1s T )(1s T (s K)s (G 21++=(3))1Ts (s K )s (G 2+=(4))1s T (s )1s T (K )s (G 221++=(5)3s K )s (G =(6)321s)1s T )(1s T (K )s (G ++=(7))1s T )(1s T )(1s T )(1s T (s )1s T )(1s T (K )s (G 432165++++++=(8)1Ts K)s (G -=(9)1Ts K )s (G +--=(10))1Ts (s K)s (G -=其系统开环幅相曲线分别如图5-6(1)~(10)所示,试根据奈氏判据判定各系统的闭环稳定性,若系统闭环不稳定,确定其s 右半平面的闭环极点数。
《自动控制原理》第5章习题答案
jω
期望极点
期望极点
− p3
j
600
j0.58
− p2
-1
− p1
0 -j
-3
-2
σ
-2
19.150 -1
40.880 0.33 0
119.640
校核相角条件: 根据在图中主导极点位置的近似值-0.33 ± j 0.58 和开环极点的位置, 作由各开环极点到期望主导极点的向量,
Φ = -119.640 -40.880 -19.150 = -179.670≈-1800
− p2
-10 -5
− p1
0
σ
②计算期望主导极点位置。
超调量σ% ≤ 20%,调整时间 ts ≤ 0.5s
4
ζω n
= 0.5s , ζω n = 8
σ%=e
−
ζπ
1−ζ 2
= 0.2 , ζ = 0.45 , θ = 63.2 0
故,期望主导极点位置, s1, 2 = −8 ± j15.8
期望极点
Gc ( s ) =
4,控制系统的结构如图 T5.3 所示,Gc(s)为校正装置传递函数,用根轨迹法设计校正装置,
使校正后的系统满足如下要求,速度误差系数 Kv ≥ 20,闭环主导极点 ω n = 4 ,阻尼系数 保持不变。
R(s)
+ -
Gc(s)
4 s ( s + 2)
Y(s)
图 T5.3
解:①校核原系统。
14
+20
0dB
1
Φ (ω ) 度
900 00
5
ω rad/s
ω rad/s
2,控制系统的结构如图 T5.1 所示,试选择控制器 Gc(s), 使系统对阶跃响应输入的超调量
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第5章频率特性法教材习题同步解析一放大器的传递函数为:G (s )=1+Ts K测得其频率响应,当ω=1rad/s 时,稳态输出与输入信号的幅值比为12/2,稳态输出与输入信号的相位差为-π/4。
求放大系数K 及时间常数T 。
解:系统稳态输出与输入信号的幅值比为A ==222172K T ω=+ 稳态输出与输入信号的相位差arctan 45T ϕω=-=-︒,即1T ω=当ω=1rad/s 时,联立以上方程得T =1,K =12放大器的传递函数为:G (s )=121s +已知单位负反馈系统的开环传递函数为5()1K G s s =+ 根据频率特性的物理意义,求闭环输入信号分别为以下信号时闭环系统的稳态输出。
(1)r (t )=sin (t +30°); (2)r (t )=2cos (2t -45°);(3)r (t )= sin (t +15°)-2cos (2t -45°); 解:该系统的闭环传递函数为65)(+=Φs s 闭环系统的幅频特性为365)(2+=ωωA闭环系统的相频特性为6arctan )(ωωϕ-=(1)输入信号的频率为1ω=,因此有37375)(=ωA ,()9.46ϕω︒=- 系统的稳态输出537()sin(20.54)37ss c t t ︒=+ (2)输入信号的频率为2ω=,因此有10()A ω=,()18.43ϕω︒=- 系统的稳态输出10()cos(263.43)2ss c t t ︒=- (3)由题(1)和题(2)有对于输入分量1:sin (t +15°),系统的稳态输出如下5371()sin( 5.54)37ss c t t ︒=+ 对于输入分量2:-2cos (2t -45°),系统的稳态输出为102()cos(263.43)ss c t t ︒=-- 根据线性系统的叠加定理,系统总的稳态输出为)4363.632cos(210)537.5sin(37375)(︒︒--+=t t t c ss绘出下列各传递函数对应的幅相频率特性与对数频率特性。
(1) 11.010)(±=s s G (2) G (s )=101) (3) )2(4)(+=s s s G(4) )2)(1(4)(++=s s s G (5))02.0(2.0)(++=s s s s G(6))1)(1(10)(2+++=s s s s G (7)1)(2.0+=-s e s G 解: (1)11.010)(±=s s G幅相频率特性 开环系统110()0.11G s s =-是一个不稳定的惯性环节,频率特性为110()10.1G j j ωω=-+相频特性为1()(180arctan 0.1)arctan 0.1180ϕωωω=-︒-=-︒相频特性从-180连续变化至-90。
可以判断开环奈氏曲线起点为(-10,j0)点,随的增加,A 1()逐渐减小至0,而1()逐渐增加至-90°,绘制出系统开环频率特性G 1(j )的轨迹,如图(a )虚线所示,是一个直径为10的半圆。
而开环系统210()0.11G s s =+则是一个典型的惯性环节,其幅相频率特性G 2(j )如图(a )实线所示。
对数频率特性(a) 幅相频率特性Im-10 Re →0→0→(b) 对数频率特性图 题(1)系统频率特性10/ (rad ·sL ()/(dB ) 20()/-90 -45 0 0 [-20]/ (rad ·s101001[0]-1801351()G j ω2()G j ω2()1()开环系统110()0.11G s s =-与210()0.11G s s =+的对数幅频特性完全相同,仅对数相频特性不同,如图(b )所示。
(2)G (s )=101)幅相频率特性开环系统G 1(s )=10-1)的频率特性为1()10(0.11)G j j ωω=-,其相频特性为1()180arctan 0.1ϕωω=︒-相频特性从180连续变化至90。
其开环频率特性G 1(j )的轨迹,如图(a )虚线所示。
而开环系统G 2(s )=10+1) 则是一个典型的一阶微分环节,其幅相频率特性G 2(j )如图(a )实线所示。
对数频率特性同题(1),二者的对数幅频特性完全相同,仅对数相频特性不同,如图(b )所示。
(3))2(4)(+=s s s G系统开环传递函数的时间常数表达式为2()(0.51)G s s s =+幅相频率特性1)系统为Ⅰ型系统,A (0)=∞,(0)=-90º,低频特性始于平行于负虚轴的无穷远处。
低频渐近线如(a) 幅相频率特性Im-10Re→0 →0 →(b) 对数频率特性图 题(2)系统频率特性10/ (rad ·sL ()/(dB ) 20()/90 45 00 [-20]/ (rad ·s10 1001 [0]180135 1()G j ω2()G j ω2()1()→下确定:将频率特性表达式分母有理化为22222(10.5)2()(0.51)(10.5)(10.5)(10.25)1210.25(10.25)j j j G j j j j j j ωωωωωωωωωωωωω----===++-+-=-++则低频渐近线为20001lim Re[()]lim ()lim110.25x G j R ωωωσωωω+++→→→-====-+ 同时可知,频率特性实部与虚部均<0,故曲线只在第三象限。
2)n -m =2,则()=-180,幅相特性沿负实轴进入坐标原点。
3)此系统无开环零点,因此在由0增大到过程中,特性的相位单调连续减小,从-90º连续变化到-180。
奈氏曲线是平滑的曲线,从低频段开始幅值逐渐减小,沿顺时针方向连续变化最后终于原点。
系统的幅相频率特性G (j )见图(a )。
对数频率特性1)可知系统包含有放大、积分、一阶惯性环节,转折频率为T=2 rad ·s -1。
低频段斜率为-20dB/dec ,低频段表达式为L (ω)=20lg2-20lg ω,并通过点L (2)= 0dB 。
经过转折频率T后斜率为-40dB/dec 。
2)系统的相频特性为积分环节(-90º)与惯性环节(0º ~-90º)相频特性的叠加,为()90arctan 0.5ϕωω=-︒-转折频率处相位为(2)=-135°,对数相频特性曲线对应于该点斜对称。
(a) 幅相频率特性Im-1Re→0→(b) 对数频率特性图 题(3)系统频率特性/ (rad ·sL ()/(dB )20()/-90[-20]/ (rad ·s1102-180-135 ()G j ω[-40]110绘制开环伯德图L ()、(),如图(b )所示。
(4))2)(1(4)(++=s s s G系统开环传递函数的时间常数表达式为2()(1)(0.51)G s s s =++幅相频率特性1)系统为0型系统,A (0)=2,(0)= 0º,开环奈氏曲线起点为(2,j0)点;n -m =2,则()=-180。
随的增加,A ()逐渐单调连续减小至0,而()滞后逐渐增加至-180°,幅相特性沿负实轴进入坐标原点。
2)将频率特性表达式分母有理化为222222222(1)(10.5)()(1)(10.5)(1)(10.25)2(10.5)3(1)(10.25)(1)(10.25)j j G j j j jωωωωωωωωωωωωω--==++++-=-++++频率特性虚部均<0,故曲线在第三、第四象限。
3)相位有()=-90,因此与虚轴的交点为22222(10.5)Re[()]0(1)(10.25)2/,Im[()]0.94G j rad s G j ωωωωωωω=-==++==此系统无开环零点,因此在由0增大到过程中,奈氏曲线是平滑的曲线,G (j )见图(a )。
对数频率特性(a) 幅相频率特性Im-Re→0→(b) 对数频率特性图 题(4)系统频率特性2 / (rad·sL ()/(dB )20 ()/-18090 0 0[-20]/ (rad·s110[0]()G j ω62 [-40]1)可知系统包含有放大、两个一阶惯性环节,转折频率分别为1=1 rad·s -1、2=2 rad·s -1。
系统为0型,低频段斜率为0dB/dec ,低频段表达式为L (ω)=20lg2=6dB 。
经过转折频率1、2后斜率分别为-20、-40dB/dec 。
2)系统的相频特性是两个惯性环节相频特性的叠加,为()arctan arctan 0.5ϕωωω=--两个转折频率处相位分别为(1)=-72°,(2)=-109°。
绘制开环伯德图L ()、(),如图(b )所示。
(5))02.0(2.0)(++=s s s s G系统开环传递函数的时间常数表达式为0.2(51)10(51)()0.02(501)(501)s s G s s s s s ++==++幅相频率特性1)系统为Ⅰ型系统,A (0)=∞,(0)=-90º,低频特性始于平行于负虚轴的无穷远处。
低频渐近线如下确定:22210(51)10(51)(150)45010(2501)()(501)(150)(150)12500(12500)j j j j j G j j j j j j ωωωωωωωωωωωωω+-+-+===--++-++(a) 幅相频率特性(b) 对数频率特性图 题(5)系统频率特性/ (rad ·sL ()/(dB )20()/-180[-20]/ (rad ·s-90 [-40]4060 [-20]-135 ImRe→0→()G j ω-450低频渐近线为2000450lim Re[()]lim ()lim 45012500x G j R ωωωσωωω+++→→→===-=-+同时可知,频率特性实部、虚部均<0,故曲线只在第三象限。
2)n -m =1,则()=-90,幅相特性沿负虚轴进入坐标原点。
3)此系统有开环零点,因此在由0增大到过程中,特性曲线有凹凸,最后终于原点。
系统的幅相频率特性G (j )见图(a )。
对数频率特性1)系统转折频率分别为1= rad·s -1、2= rad·s -1。
系统为I 型,低频段斜率为-20dB/dec ,低频段表达式为L (ω)=20lg10-20lg ω,因此L =54dB 。