自动控制原理第五章复习总结(第二版)
自动控制原理第五章

1第五章 频域分析法目的:①直观,对高频干扰的抑制能力。
对快(高频)、慢(低频)信号的跟踪能力。
②便于系统的分析与设计。
③易于用实验法定传函。
§5.1 频率特性一. 定义)()()()(1n p s p s s s G +⋅⋅⋅+=θ在系统输入端加一个正弦信号:t R t r m ωsin )(⋅=))(()(22ωωωωωj s j s R s R s R m m -+⋅=+⋅=↔ 系统输出:))(()()()()(1ωωωθj s j s R p s p s s s Y m n -+⋅⋅+⋅⋅⋅+=2t j t j e A e A t y t y ωω⋅+⋅+=↔-瞬态响应)()(1 若系统稳定,即)(s G 的极点全位于s 左半平面,则 0)(l i m 1=∞→t y t 稳态响应为:t j t j ss e A eA t y ωω⋅+⋅=-)( 而)(21)()(22ωωωωωj G R j j s s R s G A m j s m -⋅-=+⋅+⋅⋅=-= )(21)()(22ωωωωωj G R jj s s R s G A m j s m ⋅=-⋅+⋅⋅== ∴t j m t j m ss e j G R je j G R j t y ωωωω⋅⋅+⋅-⋅-=-)(21)(21)( =])()([21t j t j m e j G e j G R jωωωω-⋅--⋅⋅ 又)(s G 为s 的有理函数,故)()(*ωωj G j G -=,即3φωωj e j G j G )()(=φωωj e j G j G -=-)()( ∴][)(21)()()(φωφωω+-+--⋅=t j t j m ss e e j G R jt y =)sin()(φωω+⋅⋅t j G R m=)sin(φω+⋅t Y m可见:对稳定的线性定常系统,加入一个正弦信号,其稳态响应也是一个同频率的正弦信号。
自动控制原理第五章-2
稳定。
Im
1 Kg
wg
Re
(wc )
wc
w
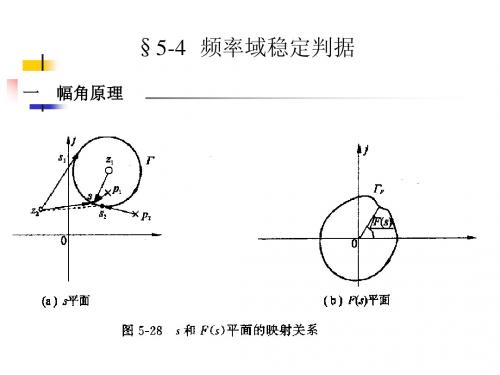
开环对数幅相曲线上的幅值裕度和相角裕度
-Kg(dB)
Kg(dB)>0
K g (dB) 20 lg
1 20 lg G ( jwg ) H ( jwg ) G ( jwg ) H ( jwg )
若系统稳定,则:Kg>1(K(dB)>0),r>0。 一般,为确定系统的相对稳定性,描述系统的稳定程度, 需要同时给出幅值裕度和相位裕度两个量,缺一不可。 工程上,一般取:
1 T w 1
2 2
(w) arctanTw
M (0) 1, M r 1, wr 0, wb 1/ T ts 3T 3 / wb , tr 2.20T 2.20 / wb
( 0.05)
T 2
2、二阶系统 R(s)
_
2 wn s( s 2wn )
K g (dB) 10dB r 300 ~ 600
(K g (dB) 6dB)
判断系统稳定的又一方法
0
h(dB) 0
h 1
180 G( jc )H ( jc )
h 20 log G ( j g ) H ( j g )
1 h G( j g ) H ( j g )
2. 带宽频率b
当系统闭环幅频特性的幅值M()降到零频率幅值的0.707(或零分贝值以下3dB) 时,对应的频率b称为截止频率。0~b的频率范围称为带宽,它反映系统的快速 性和低通滤波特性。
自动控制原理第五章

第一节
频率特性
一、频率特性的一般概念
二、频率特性的解析表示和频率特性曲线的绘制
三、频率特性的几点说明
一、频率特性的一般概念
1、频率特性的定义
若输入为:
r ( t) Ar si n ( ω 1) t
r(t)
G(s)
c(t)
t 则系统的稳态输出为: Cs s( t) A c si n ( ω 2 ) 特点:输出信号的稳态值频率不变、但幅值和相位发生一定的变化。选择量 化关系反映系统输出对不同频率正弦输入信号的复现能力,从而达到反映系 统特性的目的。
幅频特性: 相频特性: 频率特性:
A(ω )
Ac Ar
频率特性中,自变量频率取值范围 零至无穷,称全频特性。 全频特性将是系统性能分析的依据。
( ω ) 2 1
j G ( j ω) A ( ω) e (ω) G ( j ω) jG (j ω) e
2、频率特性的求取
1
Im
Ts 1
Im
ω
- Ts 1
ω
-1 1
Re ω=∞
1 Ts 1
Re ω=0
ω=0
-Ts 1
ω=∞
分析以下两个对应环节Nyquist曲线的区别?
( Ts 1 ) , ( Ts 1 ) ; 1 1 , ( Ts 1 ) ( Ts 1 )
不稳定环节Bode 曲线的绘制规律?
关注典型环节特征: Nyquist曲线所在象限; Bode曲线相频和幅频渐近线的绘制及对应关系; 不稳定环节特征(两种曲线联系分析)。
比例、积分、微分环节的Nyquist曲线和Bode曲线
ω=∞
Im
L(ω)=20LgA(ω) dB
自动控制原理简明教程第二版课后答案第五章习题答案
5-13 试用奈氏判据分宾判断题 5-5,5-6 系统的闭环稳定性。 解:5-5 (1)τ > T 时系统闭环稳定。 (2)T >τ 5-6 (1)ν =1 时系统闭环稳定。 (2)ν = 2,3,4 时系统闭环不稳定。 5-14 已知下列系统开环传递函数(参数 K,T,Ti > 0;i = 1,2,,6 ) : 时系统闭环不稳定。
8
胡寿松自动控制原理习题解答第五章 电 3 刘晓峰制作
L(ω ) (dB)
60 40 20
-20 -40 -20
0
0.1 1 2 10
-40 20 -60
100ω
ω 0 − 90
−180
5-11 绘制下列函数的对数幅频渐进特性曲线:
2
(1)G(s) =
(2s +1)(8s +1) 200 (2)G(s) = s 2(s +1)(10s +1)
1
所以:G(s) = 100(0.001s/ω
1
+1)
(s
/ω 1 +1)(s /100 +1)
11
胡寿松自动控制原理习题解答第五章 电 3 刘晓峰制作
(b)G(s) = s 102 (s(s/ω /ω
21
++11) )
(c)
G(s) = (s
2
2ξ ω nKs+2ω + s
n 2
ω
n
2
)(s /10 +1)
0.5 −87.2
1 −92.1
3 −164
5 − 216
7 − 234.5
10 − 246
自动控制原理简明教程第二版课后答案第五章习题答案
5-9 已知系统开环传递函数
10 G(s)H(s) = s(s +1)(s 2 /4 +1)
试绘制系统概略开环幅相曲线。 解:
5-10 已知系统开环传递函数
7
胡寿松自动控制原理习题解答第五章 电 3 刘晓峰制作
G(s)H(s) =
2
s
1( s
s + 921) + 3s + s 1
要求选择频率点,列表计算 A(ω ) ,L(ω )和 ϕ(ω ) ,并据此在对数坐标纸上绘制系统开环 对数频率特性曲线。
5-5 已知系统开环传递函数
G(s)H(s) = s K2 ((
τ
Ts
s+ 1 ) + 1 ) ;
K,τ ,T > 0
试分析并绘制 τ > T 和 T >τ 解:相频特性为
情况下的概略开环幅相曲线。
ϕ(ω ) =−1800 + τ ω − arctanTω
(1) τ > T 时,ϕ(ω ) >−1800 概略开环幅相曲线如下
(1) τ < T 时,ϕ(ω ) <−1800 概略开环幅相曲线如下
5-6 已知系统开环传递函数
1 G(s)H(s) = ν s (s +1)(s + 2)
4
胡寿松自动控制原理习题解答第五章 电 3 刘晓峰制作
试分别绘制 ν =1,2,3,4 时系统的概略开环幅相曲线。 解: (1)ν = 1 时系统的概略开环幅相曲线如下:
8
胡寿松自动控制原理习题解答第五章 电 3 刘晓峰制作
L(ω ) (dB)
60 40 20
-20 -40 -20
0
自动控制原理知识点总结

自动控制原理知识点总结————————————————————————————————作者:————————————————————————————————日期:自动控制原理总结第一章 绪 论技术术语1. 被控对象:是指要求实现自动控制的机器、设备或生产过程。
2. 被控量:表征被控对象工作状态的物理参量(或状态参量),如转速、压力、温度、电压、位移等。
3. 控制器:又称调节器、控制装置,由控制元件组成,它接受指令信号,输出控制作用信号于被控对象。
4. 给定值或指令信号r(t):要求控制系统按一定规律变化的信号,是系统的输入信号。
5. 干扰信号n(t):又称扰动值,是一种对系统的被控量起破坏作用的信号。
6. 反馈信号b(t):是指被控量经测量元件检测后回馈送到系统输入端的信号。
7. 偏差信号e(t):是指给定值与被控量的差值,或指令信号与反馈信号的差值。
闭环控制的主要优点:控制精度高,抗干扰能力强。
缺点:使用的元件多,线路复杂,系统的分析和设计都比较麻烦。
对控制系统的性能要求 :稳定性 快速性 准确性稳定性和快速性反映了系统的过渡过程的性能。
准确性是衡量系统稳态精度的指标,反映了动态过程后期的性能。
第二章 控制系统的数学模型拉氏变换的定义:-0()()e d st F s f t t +∞=⎰几种典型函数的拉氏变换1.单位阶跃函数1(t)2.单位斜坡函数3.等加速函数4.指数函数e -at5.正弦函数sin ωt6.余弦函数cos ωt7.单位脉冲函数(δ函数) 拉氏变换的基本法则 1.线性法则 2.微分法则 3.积分法则1()d ()f t t F s s ⎡⎤=⎣⎦⎰L4.终值定理()lim ()lim ()t s e e t sE s →∞→∞==5.位移定理00()e()sf t F s ττ--=⎡⎤⎣⎦Le ()()atf t F s a ⎡⎤=-⎣⎦L传递函数:线性定常系统在零初始条件下,输出信号的拉氏变换与输入信号的拉氏变换之比称为系统(或元部件)的传递函数。
自动控制原理(第五章)
L(ω)
0.1ωn
ωn
10ωn -40 db/dec
ω
-40
() G( j)
n 0 90 n 180 n
φ( ω )
ω
-90o -180o
自动控制原理 ——线性系统的频域分析法
7) 二阶微分环节
G( s) ( s
-30
自动控制原理 ——线性系统的频域分析法
3) 微分环节
G( s) s G( j ) j
20
L( )(dB)
0 0.01 0.1 1 10
20dB / dec
G ( j )
j
40
G ( j ) j 90
0
( )()
90 60 30 0 0.01 0.1 1 10
0
0 .1 1 T
1 T
10
1 T
自动控制原理 ——线性系统的频域分析法
2 n 6) 振荡环节 G(s) 2 2 s 2n s n 2 n G( j) 2 j ( j)2 2n ( j) n
பைடு நூலகம்
G( j )
2 2 2 (1 2 ) (2 ) 0 n n
G ( j )
1
自动控制原理 ——线性系统的频域分析法
L( )(dB)
0 .1 1 T
L( ) 20lg G ( j0)
-20 20lg 1 T 1 时,L( ) 20lg 1 0 T ( )() 1 1 时,L( ) 200 lg .1 T T T ( ) G ( j ) 0 arctanT
自动控制原理 ——线性系统的频域分析法
自动控制原理第5章
自动控制原理
第五章 频域分析法-频率法
1 sin(t arctanT ) 1 2T 2
1
e jarctanT
j 1
e 1 jT
1 2T 2
jT
1
1 jT
RC网络的频率特性
只要把传递函数式中的s以j置换,就可以 得到频率特性,即
1
1
1 jT 1 Ts sj
自动控制原理
第五章 频域分析法-频率法
对数相频特性:( ) arctan 特征点: 1 , L( ) 3dB, 45
自动控制原理
第五章 频域分析法-频率法
一阶微分环节的伯德图 幅相曲线
自动控制原理
第五章 频域分析法-频率法
六、振荡环节
传递函数: 频率特性:
G(s)
2 n
s2 2n s n2
1
s
n
2
2 n
s1
G( j
M ( ) G(j )
G1(j ) G2 (j ) G3(j ) M1( ) M2 ( ) M3 ( )
( ) G(j ) G1(j ) G2(j ) G3(j ) 1( ) 2( ) 3( )
自动控制原理
第五章 频域分析法-频率法
1.开环幅相特性曲线的绘制
例 某0型单位负反馈控制系统,系统开环
频率特性: G(j) 2 j 2 2 j 1
对数幅频特性:
L() 20lg G j 20lg 1 22 2 2 2
对数相频特性:
arctan
1
2 2
2
自动控制原理
第五章 频域分析法-频率法
幅相曲线: 0时,M 1, 0 ; 时,M =, =180
自动控制原理
自动控制原理—第五章
A( )Re j0 Re
j ( )
A( ) e
j ( )
可见,输入输出的复数比恰好表示了系统的频率特 性,其幅值与相角分别为幅频特性、相频特性的表达式。
N(s) D(s)
r(t)=Rsinωt
输出信号的拉氏变换为 Rω N(s) C(s)= (s+p )(s+p )...(s+p × = (s + j ω )(s j ω ) ) 1 2 n
K1 K2 Kn Kc K-c + + ...+ + + s + p1 s + p2 (s + p n ) (s + jω ) (s - jω )
2 4
相频特性为
( ) arctan
2
利用频率特性的概念, 系统的稳态输出为 将ω=2代入得:
c(t ) A( ) sin[2t ( )]
因此,频率特性可定义为: 线性定常系统(或元件)在零初始条件下, 当输入信号的频率ω在0→∞的范围内连续变 化时,系统输出与输入信号的幅值比与相位差 随输入频率变化而呈现的变化规律为系统的频 率特性。 频率特性可以反映出系统对不同频率的输 入信号的跟踪能力,只与系统的结构与参数有 关,是线性定常系统的固有特性。
5.1频率特性的基本概念
5.1.1频率响应
频率响应是时间响应的特例,是控制系统对正弦 输入信号的稳态正弦响应。即一个稳定的线性定常系 统,在正弦信号的作用下,稳态时输出仍是一个与输 入同频率的正弦信号,且输出的幅值与相位是输入正 弦信号频率的函数。 下面用用一个简单的实例来说明频率响应的概念:
东南大学《自动控制原理》复习总结
过阻尼系统( ζ
1):单位阶跃响应 c(t)
1
T2
1
1
e
t T1
T1
1
1
e
t T2
,t
0 ,T1
1 ωn(ζ ζ2
1)
,
T1
T2
T2
ωn(ζ
1 ζ2
1)
,调节时间
ts 最长,无超调;
临界阻尼系统( ζ 1):单位阶跃响应 c(t) 1 ωnteωnt eωnt ,t 0 ,调节时间 ts 较短,无超
出量能自动地跟踪给定量。减小了跟踪误差,提高了控制精度,此时系统抗干扰能力强,可 以抑制内外扰动。
开环控制系统
闭环控制系统
1-3 自动控制与自动控制系统 设计基本要求:在确保稳定性的前提下,要求系统的动态性能和稳态性能好,即快速、平稳、
准确,即响应动作要快,动态过程平稳,跟踪值要准确。 设计原则:保证系统的输出在给定性能要求的基础上跟踪输入信号,并且有一定的抗干扰能
微分环节:传递函数 G(s) s ;
一阶微分环节: G(s) Ts 1 ; 二阶微分环节: G(s) T 2s2 2ζTs 1 (T > 0 , 0 < ζ < 1);
一阶惯性环节: G(s) 1 ; Ts 1
二阶振荡环节: G(s)
s2
ωn2 2ζωns
ωn2
(ωn >
0
,
所有闭环的极点均具有负实部位于 s 左半平面(不包括虚轴)的系统为稳定系统(劳斯判据)。
3-6 控制系统的稳态误差分析
若系统的开环传递函数 Go(s)
Ko sυ
Gn(s) ,则系统的开环增益
Ko
lim sυ
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第五章计算机控制系统
1. 现代过程工业发展的需要;
2.生产的安全性和可靠性、生产企业的经济效益等指标的需要;
3.运算速度快、精度高、存储量大、编程灵活以及有很强的通信能力等的需要。
第一节概述
一.计算机直接数字控制系统与常规的模拟控制系统的异同:
相同:
1.基本结构相同。
2.基本概念和术语相同。
3.控制原理相同。
(都是基于“检测偏差、纠正偏差”的控制原理)
不同:
1.信息的传输形式不同。
(前者是断续的、数字化的,后者是连续的、模拟的)
二.计算机直接数字控制系统概述
1.基本结构:如图5-1所示。
2.对模拟控制系统的改进:
3.计算机控制系统的控制过程:
4.与模拟控制系统相比,计算机控制系统具有很多优点:
第二节计算机控制系统的组成及分类一.计算机控制系统的组成
计算机控制系统组成:
1.工业对象
2.工业控制计算机
硬件:计算机主机、外部设备、外围设备、工业自动化仪表和操作控制台等。
软件:计算机系统的程序系统。
计算机控制系统结构:如图5-2 所示。
(一)、硬件部分
1. 主机
2.过程输入输出通道
3.操作设备
4.常规外部设备
5.通信设备
6.系统支持功能
(二)、软件部分
1.软件包含系统软件和应用软件两部分。
系统软件:一般包括编译系统,操作系统,数据库系统,通讯网络软件,调试程序,诊断程序等。
应用软件:一般包括过程输入程序、过程控制程序、过程输出程序、打印显示程序、人机接口程序等。
2.使用语言为汇编语言,或者高级算法语言、过程控制语言。
以及它们的汇编、解释、
二.计算机控制系统的分类
包括:
数据采集和数据处理系统
直接数字控制系统DDC
监督控制系统SCC
分级计算机控制系统
集散型控制系统等
(1) 据采集和数据处理系统
(二)直接数字控制系统(DDC,Direct Digital Control)
(三).监督控制系统SCC
(四).分级计算机控制系统
(五).集散型控制系统:(也称为分布式计算机控制系统Distributed Control System)
第三节 A/D与D/A转换器
第四节计算机辅助测试系统
一.计算机在测试技术中的作用
二.计算机测试系统的基本结构
(一)结构形式
智能仪表
过程测试系统
智能测试系统
(二)计算机测试系统的组成
主要包括传感器、A/D转换器、输入/输出接口电路、计算机等。
一个具体的计算机测试系统的构成,根据所测信号的特性而定。
可分为以下几种结构:
1. 单通道数据采集:被采集的模拟信号只有一个。
2.多通道数据采集:被采集的模拟信号有两个或两个以上。
对多路模拟输入信号的采集有以下几种结构形式:
(1)多路A/D 转换方式
(2) 多路共享A/D转换方式
(3). 多路开关方式
三.数据采集
(一)采样定理
(2) 数据采集
五,计算机测试系统的设计
(一)设计任务
1.主机选型
2.输入通道结构
3.输出通道结构
(二)输入通道电路的设计分析
1.传感器选型
2.A/D转换器的设计
3.放大电路的设计
4.其它电路设计
(三)软件程序设计
1. 数据采集控制方式的设计;
2. 采样工作模式的设计;
3. 采样周期的确定;
4. 此外,还有其它程序的设计,如人机界面、信号采集、分析计算和结果处理等。
第5节直接数字控制系
统
一.DDC系统概述
二. DDC的基本算法
基本算法: PID控制时的几种控制方程。
(一)DDC的理想PID算法
1.位置式PID算法
2.增量式PID算法
(1)定义:DDC计算机经PID运算,其输出为调节阀开度(位置)的增量(改变量)时,这种PID算法称为增量式PID算法。
常见:如步进电机、多圈电位器等。
3.速度式PID算法
(1)定义:DDC计算机经PID运算,其输出是指直流伺服电机的转动速度,则此种算法称为速度式PID算法。
(二)DDC的实际PID算法
1.理想PID算法的缺憾:
2.实际PID的位置式
3.实际PID的增量式
(三)改进的PID算法
一些改进的PID算法:带死区的PID算法、遇限削弱积分或积分分离PID 算法、不完全微分PID算法、带史密斯(Smith)预测器补偿纯滞后的PID算法等。
共同特征:改变控制过程的某个阶段的P、I、D比例。
1.带有死区的PID控制
2.饱和作用的抑制(遇限削弱积分法、积分分离法)
3.其它改进的PID算法:(干扰拟制)
(四)DDC的PID算法中参数的整定
1.整定的目的:在DDC中,对PID控制器的K P、T I、T D进行整定,以求得到一组比较合适的参数。
(五)采样周期的选择
理论上,采样周期T越小,数字模拟越精确,控制效果就越接近连续控制。
第七节直接数字控制系统
集散控制系统(DCS)
现场总线控制系统(FCS)
第八节计算机控制系统的设计与实现
包括计算机硬件、软件、自动控制、检测技术及仪表、强电路与弱电路、被控对象的工艺知识等多个专业领域的知识。
考虑其他实际因素的影响,如抗干扰、防尘、降温等措施。
一.计算机控制系统的设计原则
1.系统操作性能好
2.可靠性高
3.通用性好,便于扩充
4.实时性强
5.设计周期短、价格便宜
二.计算机控制系统设计的一般步骤
1.确定系统整体控制方案
2.确定控制算法
3.系统硬、软件的设计
4.系统调试
第九节提高计算机控制系统可靠性的措施一.提高元器件的可靠性
二.冗余技术
并联系统
备用系统
表决系统
三.采取抗干扰措施
1.电磁干扰的屏蔽
2.隔离技术
3.共模输入法
4.电源系统的干扰抑制
5.布线的防干扰原则
6.接地设计
7.软件的抗干扰措施:。