施耐德PLC同步功能《电子凸轮》-《虚轴使用》
施耐德PLC十台以内多泵自动轮换控制功能块说明
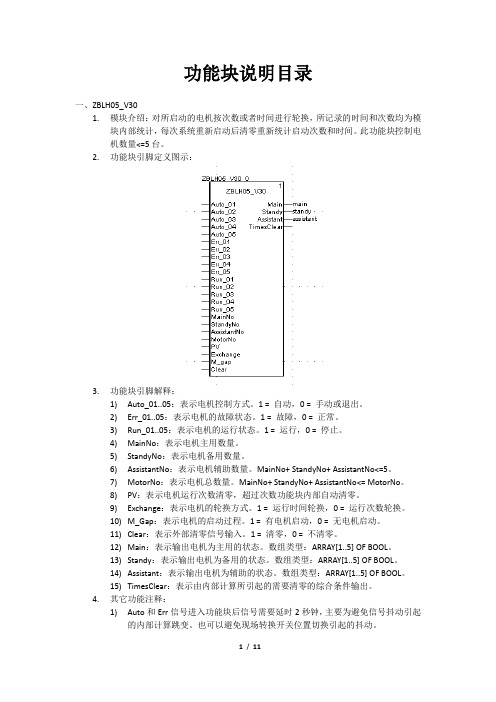
功能块说明目录一、ZBLH05_V301.模块介绍:对所启动的电机按次数或者时间进行轮换,所记录的时间和次数均为模块内部统计,每次系统重新启动后清零重新统计启动次数和时间。
此功能块控制电机数量<=5台。
2.功能块引脚定义图示:3.功能块引脚解释:1)Auto_01..05:表示电机控制方式。
1 = 自动,0 = 手动或退出。
2)Err_01..05:表示电机的故障状态。
1 = 故障,0 = 正常。
3)Run_01..05:表示电机的运行状态。
1 = 运行,0 = 停止。
4)MainNo:表示电机主用数量。
5)StandyNo:表示电机备用数量。
6)AssistantNo:表示电机辅助数量。
MainNo+ StandyNo+ AssistantNo<=5。
7)MotorNo:表示电机总数量。
MainNo+ StandyNo+ AssistantNo<= MotorNo。
8)PV:表示电机运行次数清零,超过次数功能块内部自动清零。
9)Exchange:表示电机的轮换方式。
1 = 运行时间轮换,0 = 运行次数轮换。
10)M_Gap:表示电机的启动过程。
1 = 有电机启动,0 = 无电机启动。
11)Clear:表示外部清零信号输入。
1 = 清零,0 = 不清零。
12)Main:表示输出电机为主用的状态。
数组类型:ARRAY[1..5] OF BOOL。
13)Standy:表示输出电机为备用的状态。
数组类型:ARRAY[1..5] OF BOOL。
14)Assistant:表示输出电机为辅助的状态。
数组类型:ARRAY[1..5] OF BOOL。
15)TimesClear:表示由内部计算所引起的需要清零的综合条件输出。
4.其它功能注释:1)Auto和Err信号进入功能块后信号需要延时2秒钟,主要为避免信号抖动引起的内部计算跳变。
也可以避免现场转换开关位置切换引起的抖动。
2)TimesClear信号输出条件:当内部计数器(统计的次数或者时间)大于PV时,输出信号;同时,功能块内部也同时计算每台电机的运行次数相差应小于等于5,否则输出清零信号。
施耐德PLC教程

20
PLC的I/O响应时间 为了增强PLC的抗干扰能力,提高其可靠性,PLC的每个开关量输入端都采用光
电隔离等技术。为了能实现继电器控制线路的硬逻辑并行控制, PLC采用了不同于一 般微型计算机的运行方式(扫描技术)。以上两个主要原因,使得PLC得I/O响应比一 般微型计算机构成的工业控制系统慢很多,其响应时间至少等于一个扫描周期,一般 均大于一个扫描周期甚至更长。
1.6 PID指令的用法
13
第一章 PLC基础知识
目录
1.1 可编程控制器的发展历程 1.2 可编程控制器的基本结构 1.3 可编程控制器的工作原理
• 1.3.1 扫描原理 • 1.3.2 I/O映象区,响应时间 • 1.3.3 PLC如何取代传统的继电器、接触器控制电路
14
1.1 可编程控制器的发展历程 在现代化生产设备中,有大量的开关量、数字量、以及模拟量的控制装置。例
施耐德小型PLC---TWIDO技术培训课程
基础部分 LEVEL 1
Twido
1
第一章 PLC基础知识
目录
1.1 可编程控制器的发展历程 1.2 可编程控制器的基本结构 1.3 可编程控制器的工作原理
• 1.3.1 扫描原理 • 1.3.2 I/O映象区,响应时间 • 1.3.3 PLC如何取代传统的继电器、接触器控制电路
编程设备(可选)
施耐德Premium PLC

■ 所有模块均可在通电状态、PLC运行时进行更换,而不会影响该过程的其余 部分。不需要任何手动或软件重配置,因此所有操作员均可进行此操作。 ■ Unity Pro简化了诊断:通过简单的参数设定,系统和应用程序错误消息在 源头即被记录时间,保存于PLC中,并被自动发送到所有已连接设备(Monitor Pro、Vijeo Look、Magelis和Web浏览器)。
■ 步进电机的轴控制
> 计数
> 位置
4
灵活性
消除所有限制
不受限制的内存访问
■ Premium可以确保最佳的内存管理。 除了已经具备的内存之外,每个处理器中还可以插入选装卡,以调整 可执行内存的大小,从而扩展其处理能力。 ■ 这些卡可以将源代码、数据文件与执行代码一同存储。由 于没有内存分段、没有组块或保留区,您可享有对整个 内存的完全访问权。 ■ 除了传统的符号式变量外,您还无需在使用变量时 考虑其地址,甚至还可以创建强大的数据结构。
管理级
车间级
设备级
8
模块式设计
全方面满足不同控制要求的 产品系列
强大的通信功能
每个处理器的前面板均带有: ■ 1个用于编程终端的USB口或串行端口 ■ 1个用于连接到Magelis显示设备的串行端口 ■ 1个用于串行链路、CANopen总线或网络的 PCMCIA插槽。
您也可以选择带有以下端口的产品型号:
自动化平台
Modicon Premium 全面领先
简·易·精·智!*
Unity 是施耐德电气自动化的核心产品,它是新一代的软硬件自动化平台。 其全新的独创设计缩短了开发时间,处理器的灵活性可以实现更高的运行性能。 基于开放性和对工具的协同式应用,Unity在软件开发和控制系统运行上达到了 更高的水平,它将生产率的提高放在首位。
施耐德PLC M238

离散量 I/O模块 TM2 DpI TM2 DpO
模拟量 I/O模块 TM2 AMI/ARI/ApO TM2 ApM
高速计数模块 2 x 60 kHz 通道 TM200 HSC206Dp
10 晶体管输出(包括 4 PWM/PTO) 14 离散量输入 (8 路高速输入)
- 1 Modbus/ASCII (RS 485/RS 232) 串行连接, 支持SoMachine-Network/Modbus/ASCII 协议 TM238 LDD24DT 和 TM238 LFDC24DT 单元 - 1 Modbus (RS 485) 串行连接 SoMachine-Network/Modbus/ASCII 协议 TM238 LFDC24DT 单元
– 8.512 8000 444
115 + 10 每从站 8.512 8000 444
默认变量
根据应用程序中的声明可分为两种类型的保留变量:
v 数据保持:最大8000 bytes v 永久数据保持:最大 444 bytes
前1000个定位变量 1 (%MW0-%MW999) 和所有组态为保持和永久保持类型的非定位 变量 5 都可通过内部电池或可选的外部电池来备份。如果满足启动条件, 它们的状态在重新上电后保持。另外,如果满足启动条件,
TM238 LFDC24DT。
以下安装于可编程控制器访问接口为: 11 一组可插拔螺钉端子(3 端口 +, -, t 标志 24 VDC)用于连接 24 V c 电源。 12 一组标志着 SL 的 RJ45 连接器 (适用于 TM238 LDD24DT 模块) 或两组分别标志 SL1
和 SL2 的 RJ45 连接器(适用于TM238 LFDC24DT 模块) 用于串行连接。 13 一翻盖用于在可编程控制器中装配保存内存数据以及实时时钟的备份电池。
施耐德运动控制概述motion_guide
第六章. 运动控制6.1 运动控制的定义6.2 运动控制的组成6.2.1 同步伺服电机6.2.2 步进电机6.2.3 驱动器6.2.4 控制器6.3 运动控制系统的结构6.4 运动控制要解决的问题6.5 伺服电机的选型计算6.6 典型应用6.1 运动控制的定义运动控制是指动作的单元以非常精确的设定速度在规定时间到达准确位置的可控运动. 运动单元的运动有如下特点:路径: 有一个初始位置有一个终点位置稳定的速度和上升,下降斜率动作: 静态和动态响应非常精确运动响应很快运动很稳定位置: 有绝对位置有相对位置根据不同的应用工艺, 我们把运动分为有限轴运动和无限轴运动.有限轴运动是指运动体的运动在一定范围内, 如机械手的运动在设计范围内抓取工件. 无限轴运动是指运动体连续不断的向一个方向运动,没有边界. 如传送带的运动.6.2 运动控制的组成运动控制的组成离不开以下4个单元,如图:运动控制器: 控制运动按照设定的轨迹动作,不断计算位置和速度的匹配驱动器: 把普通电能转化为向电机提供运动的动力电机: 产生对负载推动的扭矩位置传感器: 提供电机轴实时的位置和速度所以, 运动控制要完成可控的动作, 主要对3个变量进行控制.即: 电机的力矩, 速度, 位置如图所示6.2.1 同步伺服电机首先让我们看一下运动控制中的执行器: 伺服电机电机是把电枢电流转化为电机轴输出力矩的一种装置.从技术角度, 我们通常把电机分为异步电机, 同步电机和步进电机. 从运动形式来分,可分为旋转电机和直线电机。
如图所示:在运动控制系统中,用到的电机通常为同步无刷电机。
6.2.1.2 无刷伺服电机的工作原理:集成有位置编码器的电机(位置测量),其转子是永久磁铁, 定子是与异步电机一样的线圈绕组.当定子线圈通上交变电流, 就会在转子周围产生旋转磁场,而转子的磁场就会与定子产生的磁场相互作用, 驱动器根据位置反馈情况, 来调整定子磁场,使转子磁场与定子磁场成90度角,使力矩最大.同时,位置传感器测量出电机轴的旋转角度. 这里,转子的磁场是恒定的(由永久磁铁产生). 而定子的磁场是变化的, 它取决于通到线圈绕组电流的变化频率. 这样转子的转动就跟随着定子的旋转磁场一起运动. 即转子与旋转磁场同步.集成的位置传感器一般为电压分解器形式, 耐用且够一定精度.6.2.1.3 同步伺服电机的特性电机的输出力矩与定子电流( Is )成正比T=C1x Is C1: 为常数电机的转速与定子电流的频率(Freq.Is)成正比S=C2 x Freq.Is C2: 为常数电机在一定重量下,力矩的大小取决于转子的磁性材料的特性,如磁性材料为钕铁硼,或钐钴等.从上式可以看出, 磁通量越大, 轴输出力矩也越大.力矩/速度曲线,电机与驱动器组合通过力矩/速度曲线, 我们可以看出无刷伺服电机,有着低速高转矩,高过载力矩的特性.因此,这种电机能够胜任高精度,高动态响应的运动任务.6.2.2 步进电机.步进电机原理: 步进电机的定子是带有若干对磁极的永久磁铁. 定子是至少有两相绕组的线圈. 当一个绕组线圈通电时,产生磁场,转子被吸到一个磁极, 当另一个绕组通电时,产生另一个磁场,把转子吸到另一个磁极, 就这样定子线圈分步通电, 转子就被吸着一步一步转动了. (如图所示)所以,步进电机不需要位置反馈. 运动方式是开环的.6.2.3 位置传感器位置传感器集成在电机轴上,用来反馈电机旋转的位置和速度.通常有3种位置传感器1.电压分解器型2.增量编码器型3.绝对编码器型位置传感器的特性由3个参数来定义, 这3个参数是:分辨率, 精度和一致性分辨率是指测量一个位置的最小单元. 通常是一转多少脉冲。
施奈德PLC培训PPT课件

8
8
4
4
96 K 112 K
256 K
0.31ms/K <<0.50 ms/K
64 8
CPU性能参数(续)
TSX
57-10
离散量 I/O
512
模拟量
24
专用模块
8
网络
1
FIPIO 主站
-
其他总线
-
Interbus S
Profibus DP
Asi
-
TSX
57-20 1024 80 24
1 -
-
TSX 57-30
➢ 机架 0 == > CPU在 0号位置
P S
0
1
2
3
4
5
6
7
8
9
1 0
➢扩展机架
P S
0
1
2
3
4
5
6
7
8
9
1 0
用双宽度电源
➢机架 0 == > CPU在 1号位置
P S
0
1
2
3
4
5
6
7
8
9
1 0
➢扩展机架
P S
0
1
2
3
4
5
6
7
8
9
1 0
13
电源
Premium (“系统”) 电源
✓ 参数 : 110/240 VAC (90 - 264 VAC), 24 VDC (19 - 34 VDC) ✓ 保护 : 短路, 过载, 24V 传感器电源, 电源失效信号
报警 **
继电器
L
24 VDC
施耐德plc使用技巧精华总结

施耐德plc使用技巧精华总结Schneider-施耐德LEC使用技巧文集[第1讲]——如何用自编的PID算法来实现控制在各类的PLC中,都提供了PID运算指令,但在处理响应要求快的应用中,会发现现有提供的PID运算指令有时效果并不理想,所以用自编的PID算法来实现控制就成了一个解决方案。
以下是PID算法的程序示例:Schneider-施耐德LEC使用技巧文集[第2讲]——ASCII码转换为HEX和BCD码的方法在编制各种程序,尤其是ASCII通讯的应用时,常需要进行数据格式的转换,<例程1>说明ASCII 数据如何转换为HEX及BCD码的数据;<例程2>说明HEX数据如何转换为ASCII 数据。
<例程1>(*ASCII to HEX and BCD *)(* %MW0 = 3139 %MW1 = 3537 => %MW30=16#1957 %MW31=1957 *)LD 1[ %MW0 := 16#3139 ] (* 19 ASCII = 3139 HEXA *)[ %MW1 := 16#3537 ] (* 57 ASCII = 3537 HEXA *)LD 1[ %MW10 := %MW0 AND 16#000F ] (* 16# XXX9 *)[ %MW11 := %MW0 AND 16#0F00 ] (* 16# X1XX *)[ %MW12 := %MW1 AND 16#000F ] (* 16# XXX7 *)[ %MW13 := %MW1 AND 16#0F00 ] (* 16# X5XX *)LD 1[ %MW20 := SHL( %MW10, 8 ) ] (* 16# X9XX *)[ %MW21 := SHL( %MW11, 4 ) ] (* 16# 1XXX *)[ %MW22 := %MW12 ] (* 16# XXX7 *)[ %MW23 := SHR( %MW13, 4 ) ] (* 16# XX5X *)LD 1[ %MW30 := %MW20 OR %MW21 ] (* 16# 19XX *)[ %MW30 := %MW30 OR %MW22 ] (* 16# 19X7 *)[ %MW30 := %MW30 OR %MW23 ] (* 16# 1957 *)LD 1[ %MW31 := BTI( %MW30 ) ] (* 1957 *)<例程2>(* HEX to ASCII *)(* %MW30 = 16#1957 => %MW74 = 3139 %MW75 3537 *) LD 1[ %MW40 := %MW30 AND 16#000F ] (* 16# XXX7 *)[ %MW41 := %MW30 AND 16#00F0 ] (* 16# XX5X *)[ %MW42 := %MW30 AND 16#0F00 ] (* 16# X9XX *)[ %MW43 := %MW30 AND 16#F000 ] (* 16# 1XXX *)LD 1[ %MW50 := %MW40 ] (* 16# XXX7 *)[ %MW51 := SHR( %MW41, 4 ) ] (* 16# XXX5 *) [ %MW52 := SHR( %MW42, 8 ) ] (* 16# XXX9 *) [ %MW53 := SHR( %MW43, 12 ) ] (* 16# XXX1 *)LD 1[ %MW60 := %MW50 OR 16#0030 ] (* 16# XX37 *) [ %MW61 := %MW51 OR 16#0030 ] (* 16# XX35 *) [ %MW62 := %MW52 OR 16#0030 ] (* 16# XX39 *) [ %MW63 := %MW53 OR 16#0030 ] (* 16# XX31 *)LD 1[ %MW70 := %MW60 ] (* 16# XX37 *)[ %MW71 := SHL( %MW61, 8 ) ] (* 16# 35XX *) [ %MW72 := %MW62 ] (* 16# XX39 *)[ %MW73 := SHL( %MW63, 8 ) ] (* 16# 31XX *)LD 1[ %MW74 := %MW72 OR %MW73 ] (* 16# 3139 *) [ %MW75 := %MW70 OR %MW71 ] (* 16# 3537 *)Schneider-施耐德LEC使用技巧文集[第3讲]——Twido PLC做为ASCII从站设备的通讯方法Twido PLC提供有ASCII协议,这样在理论上能使得Twido和其他任何支持串行通讯的设备建立通讯。
《施耐德ModiconMMPLC技术培训功能介绍》PPT课件讲义

SE Logo
QR Code
22
电源连接
交流电源
直流电源
23
输入接线
TM100C16R / TM200C16U
TM200C16R
(*):T型熔断器 A:漏极接线(正逻辑) B:源极接线(负逻辑)
24
继电器输出
TM100C16R / TM200C16R
(*):T型熔断器 A:源极接线(正逻辑) B:漏极接线(负逻辑) (1):COM0、COM1、COM2、COM3端子在内部未相互连接 (2):电感式负载的保护
选择简单
专用于顺序控制,并内置通讯
性能: 0,2µs/inst – Prog: 10Kinst
2个高速计数器, 2 @ 100kHz 4个快速计数器, 4 @ 5kHz
SD card程序下载
易于复制和维护
串口
易于 接线
Run/Stop 开关 USB mini-B (编程口 )
按需所制
9
M200扩展板
TM3DQ16U
晶体管源型, 0.5A
螺丝端子 3.81mm
TM3DQ16T
晶体管漏型, 0.1A
HE10
TM3DQ32UK
晶体管源型, 0.1A
HE10
TM3DQ32TK
继电器, 2A
螺丝端子 5.08mm
TM3DM8R
继电器, 2A
螺丝A端ll 子Sc3r.8e1wmmterminaTlMc3oDnMn2e4Rctor
29
以太网
>Ethernet
> 10M/100M 自适应,
Magelis GXU
全双工/半双工
> RJ45 port