MATLAB汽车仿真技术复习答案
MATLAB与系统仿真期末考试模拟试题3及答案
模拟试题3一、填空题(2’×15=30’)1、在Matlab开发环境是一个集成的工作环境,包括、、、和等。
2、Matlab命令窗口中的“>>”符号表示。
3、clc表示:;more表示:;who表示:。
4、文件编辑器中的赋值语句后面的冒号“;”表示:;“%”表示:。
5、求矩阵行列式的函数:;求矩阵特征值和特征向量的函数。
6、在Matlab命令窗口中运行命令可以打开Simulink模块库浏览器窗口。
二、简答题(6’×4=24’)1、如何实现退出Matlab环境?2、在Matlab中绘制一个图形的步骤有哪些?3、Matlab提供了哪四类程序控制结构方式?4、说明进入到Matlab开发环境的方法?三、程序设计及分析(6’×7+4’=46’)1、在命令窗口中执行“>>x=ones(3,2)”的结果是:2、编程实现连接str1和str2,str1='My name is LI ming',str2='your name'?3、把2行3列矩阵A变成1行6列的矩阵B。
(123456A⎡⎤=⎢⎥⎣⎦)?4、设随机变量X~N(0,1),求概率P{X<=0.4}?5、求3()25f x x x=--在[0,5]内的最小值点?6、对表达式31f a=-进行因式分解?7、分析以下程序执行后的效果?x=-2:0.2:2;y=x;[x,y]=meshgrid(x,y);z=x.*exp(-x.^2-x.^2);mesh(x,y,z);模拟试题3及答案一、填空题(2’×15=30’)7、在Matlab开发环境是一个集成的工作环境,包括Matlab命令窗口、文件编辑调试器、工作空间、数组编辑器和在线帮助文档等。
8、Matlab命令窗口中的“>>”符号表示命令提示符。
9、clc表示:清空命令窗口中的显示内容;more表示:在命令窗口中控制其后每页的显示内容行数;who表示:查阅Matlab内存变量名。
MATLAB仿真技术
MATLAB仿真技术作业合集页脚内容1页脚内容1第1章 习题5.利用直接输入法和矩阵编辑器创建矩阵A=⎥⎦⎤⎢⎣⎡642531。
解:⑴利用直接输入法输入程序A=[1 3 5;2 4 6]按Enter 键后,屏幕显示A = 1 3 52 4 6⑵用矩阵编辑器创建矩阵,如图1.1所示。
图1.1 MATLAB 编辑器7.用矩阵编辑器创建矩阵a,使a 具有如下矩阵形式。
页脚内容2a=⎥⎦⎤⎢⎣⎡642531⇒a=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡654321⇒a=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡987654321⇒a=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡098706540321⇒a=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡0000098706540321 解:用矩阵编辑器创建矩阵a 的过程如图1.2、1.3、1.4、1.5、1.6所示。
图1.2 图1.3图1.4 图1.5图1.6页脚内容39.已知矩阵B=⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡922518113211912102201304161475231501017,试:①提取矩阵B 的第一行和第二行的第2、4、5个元素组成新矩阵1B ;②提取矩阵B 的第三行和第一行的全部元素组成新矩阵2B ;③使矩阵B 的第一行和第三行的第2;4个元素为0;④标出矩阵B 的第一行中小于5的元素。
解:①如上题,用矩阵编辑器生成矩阵B ,再输入程序B1=B([1,2],[2,4,5])按Enter 键后,屏幕显示B1 = 0 0 155 14 16②输入程序B2=B([1,3],:)按Enter 键后,屏幕显示B2 = 17 0 1 0 15 4 0 13 0 22③第一行和第三行的第2;4个元素原本就为0。
④输入程序如下C=B(1,:)<5; %将B矩阵第一行中小于5 的值标记为1D=B(1,C) %去B矩阵第一行中标为1的元素按Enter键后,屏幕显示D= 0 1 011.已知矩阵a为4阶魔方阵,令a+3赋值给b,a+b赋值给c,求b和c。
MATLAB汽车仿真技术复习答案

汽车仿真技术复习题一、术语解释:1.计算机仿真:是利用计算机对一个实际系统的结构和行为进行动态演示,以评价或预测该系统的行为效果。
是解决复杂问题的一条有效途径。
2. 矩阵的秩:矩阵线性无关的行数与列数称为矩阵的秩。
3.传递函数: 在线性定常系统中,当初始条件为零时,系统输出量的拉普拉斯变换与输入量的拉普拉斯变换之比。
4.伯德图:幅频特性曲线图和相频特性曲线图两张图合起来称为伯德图。
5.根轨迹法: 用作图的方法表示特征方程的根与系统某一参数的全部数值关系,当这一参数取特定值时,对应的特征根可在上述关系图中找到。
这种方法叫根轨迹法二、填空题1.58.135.0+=-ea =( 4.29 );程序为: >> format bank;>> a= exp(-0.5)+sqrt(13.58) a =4.292.建立M 文件求取表达式?2009998321=++++++Λ的值。
sum=0;for i=1:1:200 sum=sum+i; end在命令平台上键入sum 后回车(键入Enter 键),记录计算结果。
3. 方程的求解:0312512.5657.1069.3212345=-+-+-x x x x x,>> d=[1 -21 3.69 -10.57 56.12 -3125]; >> roots(d) ans =20.8577 2.4747 + 2.6023i 2.4747 - 2.6023i -2.4035 + 2.4168i -2.4035 - 2.4168i4.一圆柱形金属构件,直径为20cm,长为110cm,质量为362kg,求此金属的密度(3g/cm )。
试补充划线部分的程序。
>> d=20; >> L=110;>> v=pi*(d/2)*(d/2)*L; >> m=362000; >> rou=m/vrou =10.47535.复数绘图,已知复数g 的表达式)6)(5)(2)(1(60++++=ωωωωj j j j g ,ω的范围[]200,200-,增量取0.01。
MATLAB复习题(答案仅供参考)1
MATLAB复习题(答案仅供参考)1⼀、填空题1. MATLAB命令窗⼝中可⽤clear 命令清除⼯作区中的变量;⽤clc 命令清除命令窗⼝中的内容。
2. MATLAB中的运算符包括数学运算符、矩阵运算符、数组运算符。
3 MATLAB的含义为矩阵运算。
4. MATLAB中的函数类型有嵌套函数、主函数、⼦函数、私有函数和匿名函数。
5. MATLAB中⽤系统预定义的特殊变量nargin 表⽰函数输⼊参数个数。
6. size命令的功能确定数组⼤⼩。
7. MATLAB中⽤linspace 符号定义单元数组。
8. MATLAB中⽤hold on 命令打开图形保持功能。
9 MATLAB中如果⼀个变量名为123,该变量名是否合法否(填是或否)。
10. MATLAB中⽤inv 函数完成矩阵的求逆运算,⽤det 函数求矩阵的⾏列式。
11.已知C={2+5i,’Hi’;1:4,[1 2]} 输⼊s=C(3) 即s=__'_Hi__'___.12.先输⼊P=struct(‘name’,’Jack‘,’num’,43) ,再输⼊s= 即s=___Jack___.13.当x=[ 1 2 3; 4 5 6] , y=[ 5 8; 5 8 ] 时,__不能__(能﹨不能)使⽤plot 命令绘图。
14.sym 或syms _能_______(能﹨不能)创建符号矩阵。
15.已知x=3:2:24,则x有__11_个元素。
结构的开始是“if”命令,结束是_end____命令。
17.已知x为⼀个向量,计算ln(x)的MATLAB命令是计算_log(x)___。
18.命令:>>subplot(3,3,x)中有__9_个⼦图。
19.已知s=‘显⽰“hey”’,则s的元素个数是___9__。
y=f()global WW=2y=f1(5)function y=f()global Wy=w+W创建以上函数⽂件,在命令窗⼝中运⾏“y=f”命令则显⽰__出错___。
汽车理论习题答案及MATLAB编程
汽车理论课后习题答案(部分题目)教材:汽车理论(第5版)清华大学余志生主编机械工业出版社出版本文档包含习题答案:第一章:1.1 1.2 1.7 1.8第二章:2.2 2.3 2.4第三章第四章:4.1 4.2 4.3 4.5第五章:5.1 5.8 5.10 5.11 5.12 5.14 5.17第六章:6.1~6.5其中第三章 4.3 5.11 6.2 6.4 6.5所要求的MATLAB编程见本作者另一百度文库文档。
获取方法:点击左上角本作者的昵称,进入本作者的文库,《汽车理论课后习题答案—附MATLAB编程》第三章:解:(完整解题含MATLAB编程见另一文件)根据“货车最高车速为100km/h左右”,为满足五种主减速器与两种变速器匹配后车速均能达到100km/h,参照表中发动机转速,可选3006r/min、3403r/min、3804r/min三种。
结合万有特性图,考虑到动力性与燃油经济性的统一,选择转速3403r/min进行计算。
由于本人能力有限,暂难以完成EPA循环工况下的燃油消耗量计算,故以“货车采用最高档、90%负荷率工况下”的等速百公里油耗代替表示燃油经济性。
取汽油密度为0.7kg/L。
燃油经济性以等速百公里油耗Qs(L/100km)表示;动力性以2挡起步加速行驶至96.6km/h车速所用时间t(s)表示。
下面运用MATLAB编程实现计算和绘图,编程(m文件)列于最后,运行结果(4挡)如下:t=48.4235t=46.3511t=41.5557t=33.3796t=30.556490%负荷Pe=55.5647Qs4=25.103126.365628.307829.958730.7356图1加速度倒数-速度曲线图2燃油经济性-加速时间曲线由此可得出:主减速器传动比越大,动力性越好,燃油经济性越差。
与4挡变速器相比,采用5挡变速器时动力性和燃油经济性有所提高和改善。
(完整解题含MATLAB 编程见另一文件)图1图25.8某种汽车的质心位置、轴距和前后轮胎的型号已定。
(完整版)汽车理论课后作业答案MATLAB
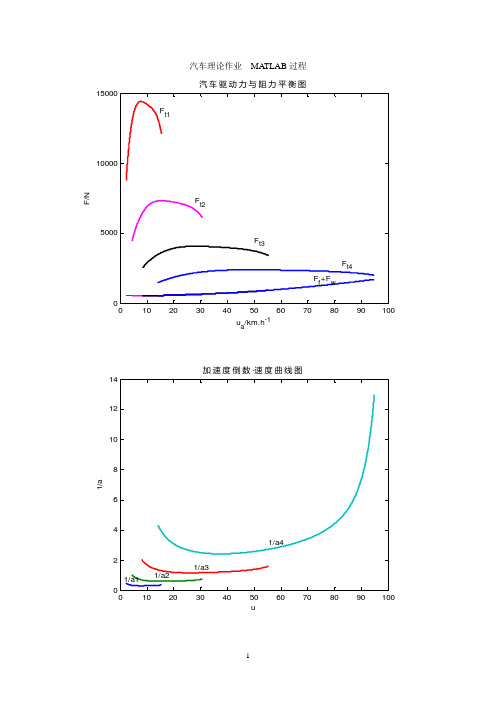
汽车理论作业 MA TLAB 过程010203040506070809010050001000015000汽车驱动力与阻力平衡图u a /km.h -1F /N10203040506070809010002468101214加速度倒数-速度曲线图u1/a0102030405060708090100102030405060u/(km/h)P /k W汽车功率平衡图10203040506070809010012141618202224最高档等速百公里油耗曲线Ua/(km/h)Q s /L2324252627282912131415161718燃油积极性-加速时间曲线燃油经济性(qs/L)动力性--原地起步加速时间 (s t /s )源程序:《第一章》m=3880; g=9.8; r=0.367; x=0.85; f=0.013; io=5.83; CdA=2.77; If=0.218; Iw1=1.798; Iw2=3.598; Iw=Iw1+Iw2;ig=[6.09 3.09 1.71 1.00]; %变速器传动比 L=3.2; a=1.947; hg=0.9; n=600:1:4000;T=-19.313+295.27*n/1000-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/1000).^4; Ft1=T*ig(1)*io*x/r;%计算各档对应转速下的驱动力Ft2=T*ig(2)*io*x/r;Ft3=T*ig(3)*io*x/r;Ft4=T*ig(4)*io*x/r;u1=0.377*r*n/(io*ig(1));u2=0.377*r*n/(io*ig(2));u3=0.377*r*n/(io*ig(3));u4=0.377*r*n/(io*ig(4));u=0:130/3400:130;F1=m*g*f+CdA*u1.^2/21.15;%计算各档对应转速下的驱动阻力F2=m*g*f+CdA*u2.^2/21.15;F3=m*g*f+CdA*u3.^2/21.15;F4=m*g*f+CdA*u4.^2/21.15;figure(1);plot(u1,Ft1,'-r',u2,Ft2,'-m',u3,Ft3,'-k',u4,Ft4,'-b',u1,F1,'-r',u2,F2,'-m',u3,F3,'-k',u4,F4,'-b','LineWidth',2)title('汽车驱动力与阻力平衡图');xlabel('u_{a}/km.h^{-1}')ylabel('F/N')gtext('F_{t1}')gtext('F_{t2}')gtext('F_{t3}')gtext('F_{t4}')gtext('F_{f}+F_{w}')%由汽车驱动力与阻力平衡图知,他们无交点,u4在最大转速时达到最大umax=u4(3401)Ft1max=max(Ft1);imax=(Ft1max-m*g*f)/(m*g)disp('假设是后轮驱动');C=imax/(a/L+hg*imax/L) % 附着率delta1=1+(Iw1+Iw2)/(m*r^2)+If*ig(1)*r^2*io^2*x/(m*r^2);delta2=1+(Iw1+Iw2)/(m*r^2)+If*ig(2)*r^2*io^2*x/(m*r^2);delta3=1+(Iw1+Iw2)/(m*r^2)+If*ig(3)*r^2*io^2*x/(m*r^2);delta4=1+(Iw1+Iw2)/(m*r^2)+If*ig(4)*r^2*io^2*x/(m*r^2);a1=(Ft1-F1)/(delta1*m); %加速度a2=(Ft2-F2)/(delta2*m);a3=(Ft3-F3)/(delta3*m);a4=(Ft4-F4)/(delta4*m);h1=1./a1; %加速度倒数h2=1./a2;h3=1./a3;h4=1./a4;figure(2);plot(u1,h1,u2,h2,u3,h3,u4,h4,'LineWidth',2); title('加速度倒数-速度曲线图');xlabel('u')ylabel('1/a')gtext('1/a1')gtext('1/a2')gtext('1/a3')gtext('1/a4')%由加速度倒数-速度曲线图可知u1min=min(u1);u1max=max(u1);u2min=u1max;u2min=min(u2);u2max=max(u2);u3min=u2max;u3max=max(u3);u4min=u3max;u4max=70;x1=[];x2=[];x3=[];x4=[];y=3401;for i=1:3401;if u3(i)<=u3min;x1=[i];endendq1=max(x1);ua3=u3(q1:y);a3=h3(q1:y);for i=1:3401;if u4(i)<=u4min;x2=[i];elseif u4(i)<=u4max;x3=[i];endendq2=max(x2);q3=max(x3);ua4=u4(q2:q3);a4=h4(q2:q3);s1=trapz(h2,u2 ); %二挡运行时间s2=trapz(ua3,a3);s3=trapz(ua4,a4);s=[s1 s2 s3];disp('积分得')t=sum(s)*1000/3600 %总时间《第二章》Pe1=Ft1.*u1./3600;%计算各档对应转速下的功率Pe2=Ft2.*u2./3600;Pe3=Ft3.*u3./3600;Pe4=Ft4.*u4./3600;P1=F1.*u1./(3600*x);%计算各档对应的各个车速下的行驶功率P2=F2.*u2./ (3600*x);P3=F3.*u3./ (3600*x);P4=F4.*u4./ (3600*x);figure(3);plot(u1,Pe1,'-r',u2,Pe2,'-m',u3,Pe3,'-k',u4,Pe4,'-b',u1,P1,'k',u2,P2,'k',u3,P3,'k', u4,P4,'k','linewidth',2);gtext('Pe1')gtext('Pe2')gtext('Pe3')gtext('Pe4')xlabel('u/(km/h)');ylabel('P/kW');title('汽车功率平衡图');n=[815 1207 1614 2012 2603 3006 3403 3804];Ua=[];Ua=0.377*r*n./(io*ig(4))ft=[];ft=m*g*f+(2.77/21.15)*Ua.^2;%计算各转速对应的各个车速下的行驶阻力Pe(1)=ft(1).*Ua(1)./(3600*x);%计算各转速对应的各个车速下的行驶阻力功率Pe(2)=ft(2).*Ua(2)./(3600*x);Pe(3)=ft(3).*Ua(3)./(3600*x);Pe(4)=ft(4).*Ua(4)./(3600*x);Pe(5)=ft(5).*Ua(5)./(3600*x);Pe(6)=ft(6).*Ua(6)./(3600*x);Pe(7)=ft(7).*Ua(7)./(3600*x);Pe(8)=ft(8).*Ua(8)./(3600*x)B0=[1326.8 1354.7 1284.4 1122.9 1141.0 1051.2 1233.9 1129.7];B1=[-416.46 -303.98 -189.75 -121.59 -98.893 -73.714 -84.478 -45.291];B2=[72.739 36.657 14.525 7.0035 4.4763 2.8593 2.9788 0.7113];B3=[-5.8629 -2.0533 -0.51184 -0.18517 -0.091077 -0.05138 -0.047449 -0.00075215];B4=[0.17768 0.043072 0.0068164 0.0018555 0.00068906 0.00035032 0.00028230-0.000038568];b1=(B0(1))+(B1(1)*Pe(1))+(B2(1)*Pe(1)^2)+(B3(1)*Pe(1)^3)+(B4(1)*Pe(1)^4);b2=(B0(2))+(B1(2)*Pe(2))+(B2(2)*Pe(2)^2)+(B3(2)*Pe(2)^3)+(B4(2)*Pe(2)^4);b3=(B0(3))+(B1(3)*Pe(3))+(B2(3)*Pe(3)^2)+(B3(3)*Pe(3)^3)+(B4(3)*Pe(3)^4);b4=(B0(4))+(B1(4)*Pe(4))+(B2(4)*Pe(4)^2)+(B3(4)*Pe(4)^3)+(B4(4)*Pe(4)^4);b5=(B0(5))+(B1(5)*Pe(5))+(B2(5)*Pe(5)^2)+(B3(5)*Pe(5)^3)+(B4(5)*Pe(5)^4);b6=(B0(6))+(B1(6)*Pe(6))+(B2(6)*Pe(6)^2)+(B3(6)*Pe(6)^3)+(B4(6)*Pe(6)^4);b7=(B0(7))+(B1(7)*Pe(7))+(B2(7)*Pe(7)^2)+(B3(7)*Pe(7)^3)+(B4(7)*Pe(7)^4);b8=(B0(8))+(B1(8)*Pe(8))+(B2(8)*Pe(8)^2)+(B3(8)*Pe(8)^3)+(B4(8)*Pe(8)^4);p=0.7;Qs=[];Qs(1)=(Pe(1)*b1)/(1.02*Ua(1).*p*g);Qs(2)=(Pe(2)*b2)/(1.02*Ua(2).*p*g);Qs(3)=(Pe(3)*b3)/(1.02*Ua(3).*p*g);Qs(4)=(Pe(4)*b4)/(1.02*Ua(4).*p*g);Qs(5)=(Pe(5)*b5)/(1.02*Ua(5).*p*g);Qs(6)=(Pe(6)*b6)/(1.02*Ua(6).*p*g);Qs(7)=(Pe(7)*b7)/(1.02*Ua(7).*p*g);Qs(8)=(Pe(8)*b8)/(1.02*Ua(8).*p*g);M=polyfit(Ua,Qs,2);UA=0.377*r*600/(ig(4)*io):1:0.377*r*4000/(ig(4)*io);%UA表示车速QS=polyval(M,UA);%QS表示油耗figure(4);plot(UA,QS,'linewidth',2);title('最高档等速百公里油耗曲线');xlabel('Ua/(km/h)');ylabel('Qs/L');《第三章》io=[5.17 5.43 5.83 6.17 6.33];Va=0.377*r*n(7)./(io.*ig(4));Ps=46.9366;disp('假设以最高档,较高转速(n取3401 ),最经济负荷(即90%负荷大约 46.9366Kw)行驶时油耗')qs=[];qs(1)=(Ps*b7)/(1.02*Va(1).*p*g);qs(2)=(Ps*b7)/(1.02*Va(2).*p*g);qs(3)=(Ps*b7)/(1.02*Va(3).*p*g);qs(4)=(Ps*b7)/(1.02*Va(4).*p*g);qs(5)=(Ps*b7)/(1.02*Va(5).*p*g);st=[ 17.5813 16.2121 14.5126 13.3775 12.9185];%加速时间:(这里以最高档〈四档〉、速度由0加速到94.93Km/h 的时间)因与题1.3第三问求法相同,这里不在累述,可直接有计算机求得:figure(5);plot(qs,st,'+','linewidth',2)hold on plot(qs,st,); gtext('5.17') gtext('5.43') gtext('5.83') gtext('6.17') gtext('6.33')title('燃油积极性-加速时间曲线'); xlabel('燃油经济性(qs/L)');ylabel('动力性--原地起步加速时间 (st/s)');《第四章》 4-31)前轴利用附着系数为:gf zh b zL +=βϕ后轴利用附着系数为: ()gr zh a zL --=βϕ1空载时:g h b L -=βϕ0=413.0845.085.138.095.3-=-⨯所以0ϕϕ>空载时后轮总是先抱死。
Matlab与控制系统仿真部分习题答案
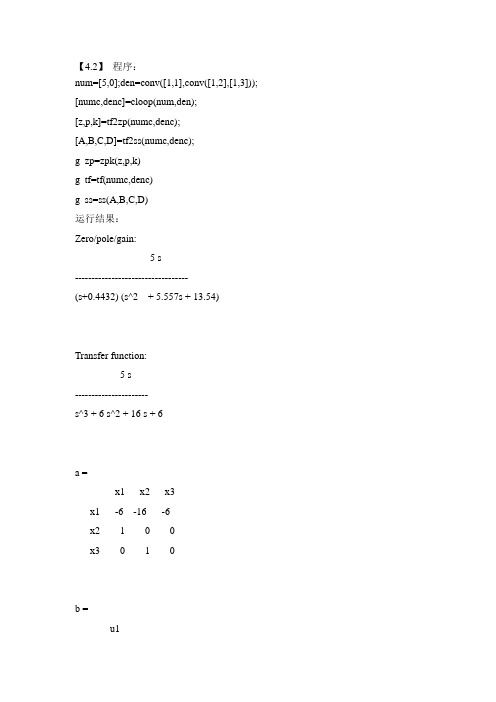
【4.2】程序:num=[5,0];den=conv([1,1],conv([1,2],[1,3])); [numc,denc]=cloop(num,den);[z,p,k]=tf2zp(numc,denc);[A,B,C,D]=tf2ss(numc,denc);g_zp=zpk(z,p,k)g_tf=tf(numc,denc)g_ss=ss(A,B,C,D)运行结果:Zero/pole/gain:5 s----------------------------------(s+0.4432) (s^2 + 5.557s + 13.54)Transfer function:5 s----------------------s^3 + 6 s^2 + 16 s + 6a =x1 x2 x3x1 -6 -16 -6x2 1 0 0x3 0 1 0b =u1x1 1x2 0x3 0c =x1 x2 x3y1 0 5 0d =u1y1 0【4.3】程序:A=[0 0 0 -1;1 0 0 -2;0 1 0 -3;0 0 1 -4]; B=[0;0;0;1];C=[1 0 0 0];g_ss=ss(A,B,C,D)[num,den]=ss2tf(A,B,C,D);g_tf=tf(num,den)[z,p,k]=ss2zp(A,B,C,D);g_zpk=zpk(z,p,k)运行结果:a =x1 x2 x3 x4x1 0 0 0 -1x2 1 0 0 -2x3 0 1 0 -3x4 0 0 1 -4b =u1x1 0x2 0x3 0x4 1c =x1 x2 x3 x4y1 1 0 0 0d =u1y1 0Continuous-time model.Transfer function:-3.109e-015 s^3 - s^2 - 3.331e-015 s - 4.441e-016 -------------------------------------------------s^4 + 4 s^3 + 3 s^2 + 2 s + 1Zero/pole/gain:- s^2----------------------------------------------(s+0.6724) (s+3.234) (s^2 + 0.0936s + 0.4599)【5.1】(1)程序num=[0,10];den=conv([1,0],[1,7,17]); [numc,denc]=cloop(num,den,-1); G=tf(numc,denc)[y,t]=step(G);plot(t,y,'b-')C=dcgain(G);n=1;while y(n)<0.1*Cn=n+1;endm=1;while y(m)<0.9*Cm=m+1;endrisetime=t(m)-t(n)[Y,k]=max(y); percentovershoot=100*(Y-C)/Ci=length(t);while(y(i)>0.98*C)&(y(i)<1.02*C) i=i-1;endsettlingtime=t(i)运行结果:Transfer function:10-----------------------s^3 + 7 s^2 + 17 s + 10risetime =2.7312percentovershoot =-0.4399settlingtime =5.1372图:0123456700.10.20.30.40.50.60.70.80.91(2)程序k=[10,100,1000];t=linspace(1,20,200);num=1;den=conv([1,0],[1,7,17]);for j=1:3;s1=tf(num*k(j),den);sys=feedback(s1,1)y(:,j)=step(sys,t);endplot(t,y(:,1),'r',t,y(:,2),'b',t,y(:,3),'g')gtext('k=10');gtext('k=100');gtext('k=1000') 运行结果:Transfer function:10-----------------------s^3 + 7 s^2 + 17 s + 10Transfer function:100------------------------s^3 + 7 s^2 + 17 s + 100Transfer function:1000-------------------------s^3 + 7 s^2 + 17 s + 1000图:024681012141618200.20.40.60.811.21.41.61.8图:02468101214161820-3-2-1123422【6.1】程序:(1)num1=[1,1];den1=conv([1,0,0],conv([1,2],[1,4]));sys1=tf(num1,den1)rlocus(sys1)运行结果:-12-10-8-6-4-2024-8-6-4-202468Root LocusReal Axis I m a g i n a r y A x i s(2)num2=[1,1];den2=conv([1,0],conv([1,-1],[1,4,16]));sys2=tf(num2,den2)rlocus(sys2)运行结果:-10-8-6-4-2024-8-6-4-202468Root LocusReal Axis I m a g i n a r y A x i s(3)num3=[1,8];den3=conv([1,0,0],conv([1,3],conv([1,5],conv([1,7],[1,15])))); sys3=tf(num3,den3)rlocus(sys3)运行结果:-30-25-20-15-10-5051015-20-15-10-505101520Root LocusReal Axis I m a g i n a r y A x i s【6.3】程序:num=[1,2];den=conv([1,0],conv([1,4],conv([1,8],[1,2,5])));sys=tf(num,den)rlocus(sys)[k,poles]=rlocfind(sys)运行结果:Transfer function:s + 2---------------------------------------s^5 + 14 s^4 + 61 s^3 + 124 s^2 + 160 sSelect a point in the graphics windowselected_point =0.0296 + 2.2826i k =135.8815poles =-7.3248-5.41040.0145 + 2.3021i0.0145 - 2.3021i -1.2939图:-20-15-10-5051015-15-10-551015Root LocusReal Axis I m a g i n a r y A x i s【7.3】程序(1)画波特图num=[50];den=conv([1,0],conv([1,10],[3,1]));sys=tf(num,den)sys1=feedback(sys,1)bode(sys)grid图(1)-150-100-50050100M a g n i t u d e (d B)10-210-1100101102103-270-225-180-135-90P h a s e (d e g )Bode DiagramFrequency (rad/sec)程序(2)画奈奎斯特图num=[50];den=conv([1,0],conv([1,10],[3,1]));sys=tf(num,den)sys1=feedback(sys,1)nyquist(sys)grid图(2)-16-14-12-10-8-6-4-20-300-200-100100200300Nyquist DiagramReal Axis I m a g i n a r y A x i s程序(3)画零极点图num=[50];den=conv([1,0],conv([1,10],[3,1]));sys=tf(num,den)sys1=feedback(sys,1)pzmap(sys1)gird图(3)P ole-Zero MapReal Axis I m a g i n a r y A x i s -12-10-8-6-4-20-1.5-1-0.50.511.5程序(4)计算相角裕量和幅值裕量num=[50];den=conv([1,0],conv([1,10],[3,1]));sys=tf(num,den)sys1=feedback(sys,1)[gm,pm,wcg,wcp]=margin(sys)运行结果Transfer function:50---------------------3 s^3 + 31 s^2 + 10 sTransfer function:50--------------------------3 s^3 + 31 s^2 + 10 s + 50gm =2.0667pm =7.5615wcg =1.8257wcp =1.2645程序(5)绘制阶跃响应曲线num=[50];den=conv([1,0],conv([1,10],[3,1])); sys=tf(num,den)sys1=feedback(sys,1)step(sys1)图(5)00.20.40.60.811.21.41.61.82Step ResponseTime (sec)A m p l i t u d e【7.4】程序如下:num=[300];den=conv([1,0,0],conv([0.2,1],[0.02,1]));sys=tf(num,den)margin(sys)grid波特图如下:-150-100-50050100M a g n i t u d e (d B )10-1100101102103-360-315-270-225-180P h a s e (d e g )Bode DiagramGm = Inf , P m = -78 deg (at 11 rad/sec)Frequency (rad/sec)【9.3】程序:A=[-2 2 -1;0 -2 0;1 -4 0];B=[0;0;1];C=[1,0,0];D=0;M=ctrb(A,B)m=rank(M)if m==3;disp('系统可控')elsedisp('系统不可控')endN=obsv(A,C)n=rank(N)if n==3;disp('系统可观')elsedisp('系统不可观') endsys=ss(A,B,C,D) [num,den]=ss2tf(A,B,C,D) sys1=tf(num,den)[z,p,k]=ss2zp(A,B,C,D)运行结果:M =0 -1 20 0 01 0 -1m =2系统不可控N =1 0 0-2 2 -13 -4 2n =2系统不可观a =x1 x2 x3x1 -2 2 -1x2 0 -2 0x3 1 -4 0b =u1x1 0x2 0x3 1c =x1 x2 x3y1 1 0 0d =u1y1 0 Continuous-time model.0 0 -1 -2den =1 4 5 2Transfer function:-s - 2---------------------s^3 + 4 s^2 + 5 s + 2z =-2p =-1-1-2k = -1【10.1】(1)程序:A=[0,1,0,0;0,5,0,0;0,0,-7,0;0,0,0,-8]; B=[0;1;0;1];C=[1,2,3,4];D=zeros(1,1);G_ss=ss(A,B,C,D)运行结果:a =x1 x2 x3 x4x1 0 1 0 0x2 0 5 0 0x3 0 0 -7 0x4 0 0 0 -8u1x1 0x2 1x3 0x4 1c =x1 x2 x3 x4y1 1 2 3 4d =u1y1 0(2):程序:[num1,den1]=ss2tf(A,B,C,D); p=roots(den1)i=0;for k=1:1:length(p)if real(p(k))>0i=i+1;endendif i>0disp('系统不稳定');elsedisp('系统稳定');end运行结果:p =5.0000-8.0000-7.0000系统不稳定(3)(4)程序:AA=[0,1,0;0,5,0;0,0,-8];BB=[0;1;1];P=[-1,-2,-8];K=acker(AA,BB,P);i=4;K(4)=0;Kpp=eig(A-B*K)sys1=tf(num1,den1);[y1,t]=step(sys1);plot(t,y1)hold onA_feedback=A-B*K;[num2,den2]=ss2tf(A_feedback,B,C,D); sys2=tf(num2,den2);[y2,t]=step(sys2);plot(t,y2,'r')gridgtext('反馈前')gtext('反馈后')运行结果:K =2 8 0 0pp =-8-2-1-7图形:01234560123456【13.1】程序:A=[0,1;0,0];B=[0;1];C=[1,0];D=zeros(1,1);G_ss=ss(A,B,C,D)M=ctrb(A,B);if rank(M)==2disp('系统完全能控'); elsedisp('系统不完全能控'); endS=[1,0];N=obsv(A,S);if rank(N)==2disp('(A,S)可观测'); elsedisp('(A,S)不可观测'); endR=1;Q=[1,0;0,0];[K,P,E]=Lqr(A,B,Q,R)A_new=A-B*K;G_new=ss(A_new,B,C,D);t=linspace(0,5,100)';y1=step(G_ss,t);y2=step(G_new,t);plot(t,y1,'r:',t,y2,'b-')gridgtext('反馈前')gtext('反馈后')运行结果:a =x1 x2x1 0 1x2 0 0b =u1x1 0x2 1c =x1 x2y1 1 0d =u1y1 0Continuous-time model. 系统完全能控(A,S)可观测K =1.0000 1.4142P =1.4142 1.00001.0000 1.4142E =-0.7071 + 0.7071i-0.7071 - 0.7071i图形:00.51 1.52 2.53 3.54 4.5502468101214。
汽车理论课后习题MATLAB编程-武汉理工版
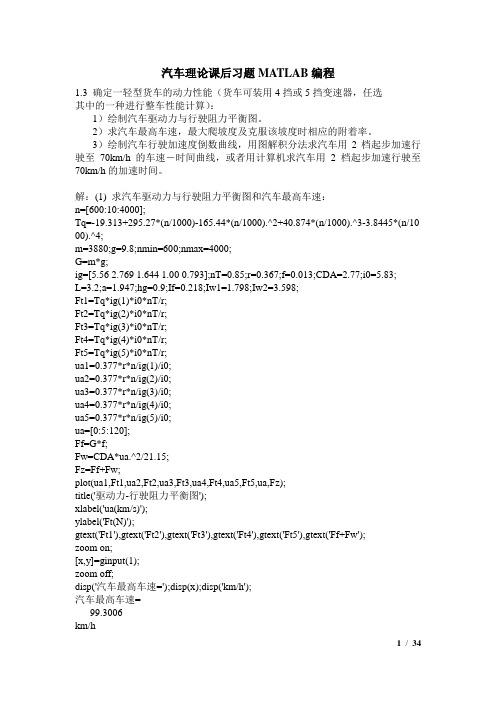
汽车理论课后习题MATLAB编程1.3 确定一轻型货车的动力性能(货车可装用4挡或5挡变速器,任选其中的一种进行整车性能计算):1)绘制汽车驱动力与行驶阻力平衡图。
2)求汽车最高车速,最大爬坡度及克服该坡度时相应的附着率。
3)绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用2档起步加速行驶至70km/h的车速-时间曲线,或者用计算机求汽车用2档起步加速行驶至70km/h的加速时间。
解:(1) 求汽车驱动力与行驶阻力平衡图和汽车最高车速:n=[600:10:4000];Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/10 00).^4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;Ft2=Tq*ig(2)*i0*nT/r;Ft3=Tq*ig(3)*i0*nT/r;Ft4=Tq*ig(4)*i0*nT/r;Ft5=Tq*ig(5)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;ua2=0.377*r*n/ig(2)/i0;ua3=0.377*r*n/ig(3)/i0;ua4=0.377*r*n/ig(4)/i0;ua5=0.377*r*n/ig(5)/i0;ua=[0:5:120];Ff=G*f;Fw=CDA*ua.^2/21.15;Fz=Ff+Fw;plot(ua1,Ft1,ua2,Ft2,ua3,Ft3,ua4,Ft4,ua5,Ft5,ua,Fz);title('驱动力-行驶阻力平衡图');xlabel('ua(km/s)');ylabel('Ft(N)');gtext('Ft1'),gtext('Ft2'),gtext('Ft3'),gtext('Ft4'),gtext('Ft5'),gtext('Ff+Fw');zoom on;[x,y]=ginput(1);zoom off;disp('汽车最高车速=');disp(x);disp('km/h');汽车最高车速=99.3006km/h(2)求汽车最大爬坡度程序:n=[600:10:4000];Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/10 00).^4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;Ff=G*f;Fw1=CDA*ua1.^2/21.15;Fz1=Ff+Fw1;Fi1=Ft1-Fz1;Zoom on;imax=100*tan(asin(max(Fi1/G)));disp('汽车最大爬坡度=');disp(imax);disp('%');汽车最大爬坡度=35.2197%(3)求最大爬坡度相应的附着率和求汽车行驶加速度倒数曲线程序:clearn=[600:10:4000];Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/10 00).^4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;Ft2=Tq*ig(2)*i0*nT/r;Ft3=Tq*ig(3)*i0*nT/r;Ft4=Tq*ig(4)*i0*nT/r;Ft5=Tq*ig(5)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;ua2=0.377*r*n/ig(2)/i0;ua3=0.377*r*n/ig(3)/i0;ua4=0.377*r*n/ig(4)/i0;ua5=0.377*r*n/ig(5)/i0;Fw1=CDA*ua1.^2/21.15;Fw2=CDA*ua2.^2/21.15;Fw3=CDA*ua3.^2/21.15;Fw4=CDA*ua4.^2/21.15;Fw5=CDA*ua5.^2/21.15;Ff=G*f;deta1=1+(Iw1+Iw2)/(m*r^2)+(If*ig(1)^2*i0^2*nT)/(m*r^2);deta2=1+(Iw1+Iw2)/(m*r^2)+(If*ig(2)^2*i0^2*nT)/(m*r^2);deta3=1+(Iw1+Iw2)/(m*r^2)+(If*ig(3)^2*i0^2*nT)/(m*r^2);deta4=1+(Iw1+Iw2)/(m*r^2)+(If*ig(4)^2*i0^2*nT)/(m*r^2);deta5=1+(Iw1+Iw2)/(m*r^2)+(If*ig(5)^2*i0^2*nT)/(m*r^2);a1=(Ft1-Ff-Fw1)/(deta1*m);ad1=1./a1;a2=(Ft2-Ff-Fw2)/(deta2*m);ad2=1./a2;a3=(Ft3-Ff-Fw3)/(deta3*m);ad3=1./a3;a4=(Ft4-Ff-Fw4)/(deta4*m);ad4=1./a4;a5=(Ft5-Ff-Fw5)/(deta5*m);ad5=1./a5;plot(ua1,ad1,ua2,ad2,ua3,ad3,ua4,ad4,ua5,ad5);axis([0 99 0 10]);title('汽车的加速度倒数曲线');xlabel('ua(km/h)');ylabel('1/a');gtext('1/a1');gtext('1/a2');gtext('1/a3');gtext('1/a4');gtext('1/a5');a=max(a1);af=asin(max(Ft1-Ff-Fw1)/G);C=tan(af)/(a/L+hg*tan(af)/L);disp('假设后轮驱动,最大爬坡度相应的附着率=');disp(C);假设后轮驱动,最大爬坡度相应的附着率=0.4219(4) >>clearnT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;If=0.218;Iw1=1.798;Iw2=3.598;L=3.2;a=1.947;hg=0.9;m=3880;g=9.8;G=m*g; ig=[5.56 2.769 1.644 1.00 0.793];nmin=600;nmax=4000;u1=0.377*r*nmin./ig/i0;u2=0.377*r*nmax./ig/i0;deta=0*ig;for i=1:5deta(i)=1+(Iw1+Iw2)/(m*r^2)+(If*(ig(i))^2*i0^2*nT)/(m*r^2);endua=[6:0.01:99];N=length(ua);n=0;Tq=0;Ft=0;inv_a=0*ua;delta=0*ua;Ff=G*f;Fw=CDA*ua.^2/21.15;for i=1:Nk=i;if ua(i)<=u2(2)n=ua(i)*(ig(2)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/100 0)^4;Ft=Tq*ig(2)*i0*nT/r;inv_a(i)=(deta(2)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elseif ua(i)<=u2(3)n=ua(i)*(ig(3)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/100 0)^4;Ft=Tq*ig(3)*i0*nT/r;inv_a(i)=(deta(3)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elseif ua(i)<=u2(4)n=ua(i)*(ig(4)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/100 0)^4;Ft=Tq*ig(4)*i0*nT/r;inv_a(i)=(deta(4)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elsen=ua(i)*(ig(5)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/100 0)^4;Ft=Tq*ig(5)*i0*nT/r;inv_a(i)=(deta(5)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;enda=delta(1:k);t(i)=sum(a);endplot(t,ua);axis([0 80 0 100]);title('汽车2档原地起步换挡加速时间曲线');xlabel('时间t(s)');ylabel('速度ua(km/h)');>> ginputans =25.8223 70.073725.7467 70.0737所以汽车2档原地起步换挡加速行驶至70km/h的加速时间约为25.8s2.7已知货车装用汽油发动机的负荷特性与万有特性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汽车仿真技术复习题一、术语解释:1.计算机仿真:是利用计算机对一个实际系统的结构和行为进行动态演示,以评价或预测该系统的行为效果。
是解决复杂问题的一条有效途径。
2. 矩阵的秩:矩阵线性无关的行数与列数称为矩阵的秩。
3.传递函数: 在线性定常系统中,当初始条件为零时,系统输出量的拉普拉斯变换与输入量的拉普拉斯变换之比。
4.伯德图:幅频特性曲线图和相频特性曲线图两张图合起来称为伯德图。
5.根轨迹法: 用作图的方法表示特征方程的根与系统某一参数的全部数值关系,当这一参数取特定值时,对应的特征根可在上述关系图中找到。
这种方法叫根轨迹法二、填空题1.58.135.0+=-ea =( 4.29 );程序为: >> format bank;>> a= exp(-0.5)+sqrt(13.58) a =4.292.建立M 文件求取表达式?2009998321=++++++Λ的值。
sum=0;for i=1:1:200 sum=sum+i; end在命令平台上键入sum 后回车(键入Enter 键),记录计算结果。
3. 方程的求解:0312512.5657.1069.3212345=-+-+-x x x x x,>> d=[1 -21 3.69 -10.57 56.12 -3125]; >> roots(d) ans =20.8577 2.4747 + 2.6023i 2.4747 - 2.6023i -2.4035 + 2.4168i -2.4035 - 2.4168i4.一圆柱形金属构件,直径为20cm,长为110cm,质量为362kg,求此金属的密度(3g/cm )。
试补充划线部分的程序。
>> d=20; >> L=110;>> v=pi*(d/2)*(d/2)*L; >> m=362000; >> rou=m/vrou =10.47535.复数绘图,已知复数g 的表达式)6)(5)(2)(1(60++++=ωωωωj j j j g ,ω的范围[]200,200-,增量取0.01。
试补充划线部分的程序。
w=-200:0.01:200;g=60./((1+j*w).* (2+j*w) .* (5+j*w) .* (6+j*w)); plot(g); grid;6.数值计算⎰⎰-+10195.212)3sin(dy y x dx )(>> dblquad(inline('sin(3*x)+y.^2'),1,10,-1,2.95) ans =78.510537211633487.求1)sin(5.0+=-x e y x 在[2,8]内的最小值。
>>f=inline('exp(-0.5*x).*sin(x)+1'); >> [xmin,fval]=fminbnd(f,2,8) xmin =4.24872619592456 fval =0.893108658607248.利用函数绘图命令绘制)8/2sin(5.0π-=-x e y x ,其中]5,0[∈x ;>> fplot( 'exp(-0.5*x).*sin(2*x-pi/8)',[0,5,-1.1,1.1] ) 9.请补充完整以下程序: x=0; n=1; while n<6 x= n+x ; n= n+1 ; end x运行结果x= 15 .三、简答题1.绘制三维曲面图)2.0sin())cos(sin(x y x z -+=,其中 [x,y]=meshgrid(0:0.2:13)。
试写出程序。
(已给出结果图,如图1)[x,y]=meshgrid(0:0.2:13); z=sin(x+cos(y))-sin(0.2*x); mesh(x,y,z);title('三维曲面图');2.写出以下系统的多项式模型,并将其转换为零极点模型2153173261552115.35291)(23452341++++++-+-=s s s s s s s s s s G>> n1=[91,-52,3.5,-11,52]; d1=[1,15,26,73,31,215]; sys1=tf(n1,d1)[z1,p1,k1]=tf2zp(n1,d1) sys1zp=zpk(z1,p1,k1)3..已知单位负反馈系统的开环传递函数为()()()10.5s 10.2s 1s 1.0ks G +++=)(要求编程绘制50=k 时的极坐标图,确定曲线与负实轴的交点坐标及频率值。
(已给出结果图2) n=50;d=conv([0.1,1],conv([0.2,1],[0.5,1])); sys=tf(n,d); nyquist(sys)曲线与负实轴的交点坐标为-3.76; 曲线与负实轴的交点频率值9.2;4.单位反馈系统的开环传递函数为)3)(2()1()(+++=s s s s K s G g试编程绘制闭环系统的根轨迹(根轨迹图已给出,如图3)。
并回答 (1)闭环系统稳定的g K 的取值范围; (2)系统的阶跃响应有超调的g K 的取值范围; (3)分离点的坐标。
编程:%ggj01.m z=[-1];p=[0;-2;-3]; k=[1];sys=zpk(z,p,k); rlocus(sys)(1)系统稳定的g K 的取值范围:0>g K ;(2)系统的阶跃响应有超调的g K 的取值范围:419.0>g K ,(3)分离点的坐标:47.2-=d5.有二个系统如图(a )、(b )所示,编程分别绘制各系统的单位阶跃响应和单位脉冲响应。
(a )(b))(s R⊗(c ) 图5-176.增量与绘图,通过仿真结果回答问题(1)程序1t1=0:4*pi;y1=sin(2*t1);plot(t1,y1);程序1可得到图形正弦曲线A(增量为默认值1)。
(2)程序2t2=0:0.2:4*pi;y2=sin(2*t2);plot(t2,y2);程序2可得到图形正弦曲线B(增量为0.2)。
(3)程序3t3=0:0.01:4*pi;y3=sin(2*t3);plot(t3,y3);程序3可得到图形正弦曲线C(增量为0.01)。
(4)程序4t4=0:0.00001:4*pi;y4=sin(2*t4);plot(t4,y4);程序4可得到图形正弦曲线D(增量为0.00001):回答问题:①通过MATLAB仿真得到的正弦曲线A、B、C有何区别?答:曲线A失真严重,曲线B略有失真,曲线C几乎没有失真。
②通过MATLAB仿真得到的正弦曲线C、D有何区别?答:曲线C和曲线D区别不大。
③你得到的结论是通常情况下增量(步长)取多少为宜?答:通常情况下增量(步长)取0.01即可满足一般的仿真要求和仿真精度。
7. 绘制)3cos(t r =,[]π3,0∈t 的极坐标(polar )图,试写出程序。
t=0:0.01:3*pi; r=cos(3*t); polar(t,r)8.采用图形保持,在同一坐标内绘制曲线)sin(1x y = ,)sin(25.0x e y x -=,)cos(3x y =,]10,0[∈x 。
试写出程序。
(已给出结果图2)x=0:0.01:10; y1=sin(x);y2=exp(-0.5*x).*sin(x); y3=cos(x);plot(x,y1, 'k'); hold on;plot(x,y2, 'r'); plot(x,y3, 'b'); hold off;9. 试编写计算程序画出曲线与曲面图形.22,22,)1((2).);20(cos sin (1).223322≤≤-≤≤-++=≤≤⎪⎩⎪⎨⎧==--y x y x ex z t ty t x y x π%1 %2t=0:0.1: 2*pi; [x,y]=meshgrid(-2:0.1:2);x= sin(t).^3; z=(x.^2+1).* exp(-x.^2- y.^2+)+x.^2.*y;y= cos (t).^3; mesh(x,y,z) plot(x,y)10. 编写程序解决下列问题: (1)试产生1004阶矩阵使其元素在0—100之间的随机整数,可将此矩阵理解为100名同学的四门课程(课程1, 课程2, 课程3, 课程4)的成绩. (2)计算出每门课程和每位同学的平均成绩; (3)统计出总的优秀人次(90分及以上为优秀);(4)统计出四门课程成绩至少有两门课程不及格的人数 (1) a=fix((100-0+1)*rand(100,4)); (2) mean(a) mean(a,2) (3)sum(sum(a>=90,2)==4) (4)sum(sum(a<60,2)>=2) 11.).50,20(]2,0[)2()),(1:(;)1(,sin )1()(11==-=∑=+n n x fun y function kx k x f nk k 分别取内图形用子图画出该函数在程序的第一句为返回该函数并保存试编写函数式文件程序设π(1). function y=fun1(x,n) (2). x=0:0.1:2*pi;y=0; y1= fun1 (x,20); for k=1:n y2= fun1 (x,50);y=y+ ((-1)^(k+1)*sin(k*x))/k; subplot(2,1,1),plot(x,y1) end subplot(2,1,2),plot(x,y2) y。