基于HyperMesh实体单元网格划分
基于HyperMesh实体单元网格划分

基于HyperMesh实体单元网格划分运用HyperMesh 中的3D 实体单元网格划分的多种功能,介绍了几种典型几何特征的划分思路,为以后进行类似网格划分工作提供参考,同时也验证了HyperMesh 在划分实体网格方面的强大功能。
1 概述计算机辅助工程(CAE)在汽车行业应用已有很多年了,许多有限元理论及软件都得到了成熟运用。
在众多软件中美国 Altair公司的HyperMesh是其中的佼佼者。
像在板壳单元、实体单元、焊接单元等的创建,以及与其它软件的接口等方面,都能表现出良好的性能。
其中尤其是在实体单元的划分方面有其独特的优势,以下将通过几个比较典型的实例来详细说明,同时也可以为以后再进行类似工作提供解决思路。
2 实例描述2.1 座椅垫实体几何的网格划分本例将通过一套座椅垫实体网格划分来介绍在HyperMesh8.0中新增加的处理实体几何的功能。
如图1所示是一套座椅垫,原始几何只有外表面的一层壳几何,而且几何形状也不规则,在以前不能处理实体几何的时候,一般处理方法是首先几何清理,然后通过添加一些辅助面构成封闭壳体,再根据经验把大块儿体分成相对较规则的若干小块儿,最后可以运用3D子面板中的Solid map-general或Linear solid 等工具先把各个小块儿划分网格,然后再把各个小块缝合到一起。
这样做的不足是一方面需要做大量的辅助面,另一方面在划分各个小块儿时需要考虑最后缝合时的节点对应问题。
通过观察几何模型发现,虽然座椅垫几何形状不规则,但它没有局部突出或相贯的几何特征,所以可以考虑把板壳几何封闭后生成实体几何,再通过几何清理后得到如图2所示的几何体,运用3D子面板中的Solid map- volume工具,设置好相关参数后就可以自动划分出以六面体为主五面体为辅的实体网格。
而且软件自动划分的网格能够完全与几何贴合,网格质量还比较好,只需稍微调整一下后就可以全部达到网格质量要求。
现在整个过程所花费的时间比以前要节省70%以上。
hypermesh网格划分总结
Hypermesh网格划分1 入门基础篇1、如何将.igs文件或.stl文件导入hypermesh进行分网?files\import\切换选项至iges格式,然后点击import...按钮去寻找你的iges文件吧。
划分网格前别忘了清理几何2、导入的为一整体,如何分成不同的comps?两物体相交,交线如何做?怎样从面的轮廓产生线(line)?都用surface editSurface edit的详细用法见HELP,点索引,输入surface edit3、老大,有没有划分3D实体的详细例子?打开hm,屏幕右下角help,帮助目录下hyperworks/tutorials/hyermesh tutorials/3D element,有4个例子。
4、如何在hypermesh里建实体?hm的几何建模能力不太强,而且其中没有体的概念,但它的曲面功能很强的.在2d面板中可以通过许多方式构建面或者曲面,在3D面板中也可以建造标准的3D曲面,但是对于曲面间的操作,由于没有"体"的概念,布尔运算就少了,分割面作就可以了5、请问怎么在hypermesh中将两个相交平面到圆角啊?defeature/surf fillets6、使用reflect命令的话,得到了映射的另一半,原先的却不见了,怎么办呢?法1、在选择reflect后选择duplicate复制一个就可以法2、先把已建单元organize〉copy到一个辅助collector中,再对它进行reflect,将得到的新单元organize〉move到原collector中,最后将两部分equivalence,就ok拉。
7、请问在hypermesh中如何划分装配体?比如铸造中的沙型和铸件以及冷铁,他们为不同材质,要求界面单元共用,但必须能分别开?你可以先划分其中一个部件,在装配面上的单元进行投影拷贝到被装配面上8、我现在有这样一个问题,曲线是一条线,我想把它分成四段,这样可以对每一段指定density,网格质量会比直接用一条封闭的线好。
基于HyperMesh实体单元格划分
基于HyperMesh实体单元格划分基于HyperMesh的实体单元网格生成摘要:利用HyperMesh的三维实体网格划分功能,介绍了几种典型几何特征的划分思路,为今后类似的网格划分提供参考,也验证了HyperMesh在实体网格划分中的强大功能。
1概述计算机辅助工程(CAE)已经在汽车工业中应用多年,许多有限元理论和软件已经得到了成熟的应用。
美国阿尔泰公司的HyperMesh是优秀的软件之一。
例如,创建板壳单元、实体单元、焊接单元等。
,以及与其他软件的接口等。
,可以表现出良好的表现。
特别是在实体单元的划分上有其独特的优势。
下面将通过几个典型的例子进行详细的说明,这也可以为以后类似的工作提供解决方案。
示例描述2.1座垫实体几何图形的网格生成本示例将通过一组座垫实体网格划分,介绍HyperMesh8.0中新增的处理实体几何的功能。
如图1所示的是一套座垫。
原始几何图形只是外表面上的一层壳几何图形,并且该几何图形是不规则的。
当以前无法处理立体几何时,一般的处理方法是先清理几何,然后通过添加一些辅助曲面形成一个封闭的壳体,然后根据经验将大块分割成相对规则的小块。
最后,可以使用3D子面板中的“实体贴图-一般”或“线性实体”等工具,首先将小块分割成网格,然后将小块缝合在一起。
这种方法的缺点是,一方面需要制作大量的辅助面,另一方面,在划分每个小块时,需要考虑最后缝纫时的节点对应问题。
通过对几何模型的观察,发现虽然座垫具有不规则的几何形状,但是它不具有局部突出或相交的几何特征,所以我们可以考虑如何在几何闭合板和壳之后生成实体,然后在几何清洗之后得到如图2所示的几何体。
使用3D子面板中的实体贴图-体积工具,在设置相关参数后,可以自动划分以六面体为主、五面体为辅的实体网格。
此外,软件自动划分的网格可以完全符合几何图形,网格质量相对较好。
只需稍加调整即可完全满足网格质量要求。
现在整个过程比以前少花了70%以上的时间。
2.2考虑油路特性的连杆实体网格划分下面将通过一个发动机连杆实体网格划分的实例,简要介绍不连续特征的过渡处理方法。
HyperMesh网格划分,模型处理

HyperMesh前处理平台 体网格划分
•
六面体网格划分
HyperMesh的3-D六面体网格划 分,功能强大而灵活,同时保证高 质量
HyperMesh提供Mappable几何区域 的显示模式,可更快实现区域的合 理剖分,从而提高六面体网格划分 的效率
•
四面体网格划分
• 自动保证实体之间网格的连续性
可直接快速改变现有网格模型的各 种参数和特征,实现新的设计
可以将现有的网格自适应调整以满 足新的几何
使CAE工程师可以按自己的思路、想 法方便而直观地改变网格外形
HyperMesh前处理平台 Connectors
HyperMesh前处理平台 Connectors
Bolts Seam Welding Adhesive Weld File support 支持焊点文件
• 几何特征的修复(clip_repair.hm)
• 创建缺失曲面 • 删除重复曲面 • 编辑曲面连接关系
• 中面抽取(clip_repair.hm) • 几何特征的简化(clip_repair.hm)
• 小孔的去除 • 曲面圆角的去除 • 面内圆角/倒角的去除
• 2D网格划分
线框网格剖分
除Automesh外,HyperMesh还可以直接利用曲线生成2D/3D网格 • 线框为边界的2D网格划分(bracket.hm) • 单元节点为边界的2D网格划分(bracket.hm) • 混合边界类型的2D网格划分(bracket.hm) • 通过拉伸、旋转、扫略进行2D网格划分(bracket.hm)
HyperMesh前处理平台 Penetration Checking
交叉和穿透检查
• 在图形区单独显示干涉单元
Hypermesh六面体3D网格划分概述-hexameshing
注意事项: 1、尽可能减少分割的数量 2、起始面与目标面:起始面可以有多个,目标面只能为一个 3、路径中的边界与硬点
4、倒角的处理 如有需要,先劈分倒角面,再压缩边(如下图)
5、通过面网格来控制实体网格 先在起始面画网格,然后再volume
6、划分时,要先划分与已有的相邻几何
请您及时更换请请请您正在使用的模版将于2周后被下线请您及时更换
Hypermesh六面体 3D网格划分概述 -hexameshing一、实体几何二、常见的六 Nhomakorabea体划分方法
1、drag-拉伸 2、spin-旋转 3、line drag-沿线拉伸 4、element offset-单元偏移 5、linear solid-线性近似 6、solid map-映射 注意事项:
四 、 其 他 几 何 、 网 格 编 辑 操 作 ( 在 Tool主 菜 单 页 中 )
参考文献:
1、HyperMesh10.0基础培训教程 2、hypermesh_training中文版自学必备
使用Hypermesh进行网格划分与网格检查实例

使用Hypermesh进行网格划分与网格检查实例用Hypermesh划分网格特点是:简单、快捷、方便检查与调整网格质量。
下面介绍将CATIA 中生成的模型导入到Hypermesh中划分网格,首先打开Hypermesh 12.0。
如下图片1。
1、在CATIA里生成模型并进行初步处理。
对模型的处理要求如下:模型的面不能有间隙,不能有相对于网格尺寸而言过小的细小面,有限元模型不能划分出比网格尺寸还要小的细小面;生成的模型要求是实体模型,如果模型只有面组成,无法在Hypermesh中显示。
将实体模型文件保存为stp格式(盗版软件不能直接将CATIA文件导入)。
在Hypermesh 中选择File——Import,文件格式选择stp,输入模型。
如下图片2。
(注意路径不能有中文)2、导入楔形体模型后,在工具栏里选项选为Mixed,显示模型的面与线条。
如下图片3。
如果是复杂模型,那么模型表面可能出现红色的线条,表明该处有间隙,需要进行合并。
在主界面选择Geom栏下进入edge edit 选项,在toggle选项栏下,选中模型中红色的边线,软件会自动进行合并。
如下图片4和图片5。
如果toggle失败,可以适当调大cleanup tol=的数值。
3、确认模型的单位制:在Geom栏下,点击length,测量模型的长度。
如下图片6。
鼠标左键点击选中模型的一条边线,再点击length,会显示该线条的长度。
如下图片7。
本例中模型边长为1000,那么是毫米单位制。
在下面中划分0.02m尺寸的网格时,输入网格尺寸20。
4、在主界面快捷栏选中2D,进入automesh界面,如下图片8。
设置需要划分的面(左键点击sufs,在弹出的选项中选择displayed,表明对所有显示的面进行网格划分),在element size里输入网格尺寸20,在mesh type里选择网格类型为quads(trias不能用来提取压力信息),其它选项默认。
HyperMesh六面体网格划分教程
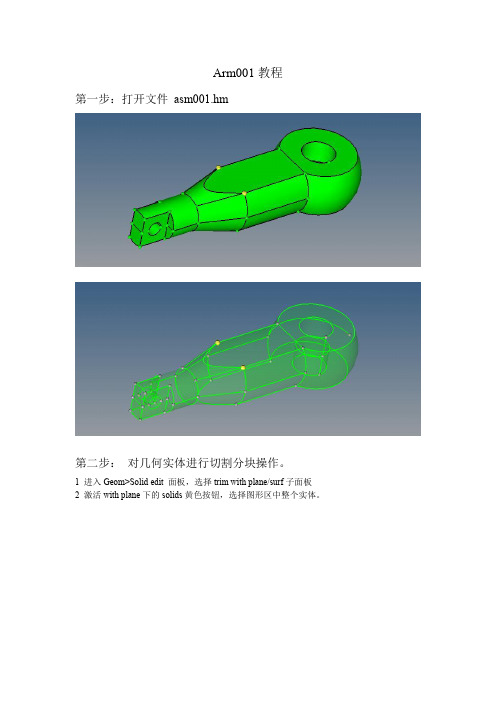
Arm001教程第一步:打开文件asm001.hm第二步:对几何实体进行切割分块操作。
1 进入Geom>Solid edit 面板,选择trim with plane/surf子面板2 激活with plane下的solids黄色按钮,选择图形区中整个实体。
3 激活下面的绿色N1按钮,并如图依次选择N1、N2、N3、B这四个点4 点击trim,将实体切割成为上下对称的两个体。
5 激活with plane下的solids黄色按钮,选择切割好的上半部分实体。
6 激活线面的N1绿色按钮,如图依次选择N1、N2、N3这三个点。
7 点击trim,将这上半部分实体切割成左右对称的两个实体。
第三步:删除多余实体和临时节点1 点击F2快接键,进入Delete面板。
2 激活黄色的solids按钮,并勾选delete bounding surfs。
在图形区中选择下半部分实体和上边的左半部分实体。
3 点击delete entity,删除掉多余的实体。
4 进入Geom>temp node面板,点击绿色的clear all按钮,删除掉多余的临时节点。
第四步:继续对要划分网格的实体进行切割操作1 进入Solid edit 面板,选择trim with plane/surf子面板2 激活with plane下的solids黄色按钮,选择图形区中整个实体。
3 激活下面的N1绿色按钮,并如图依次选择N1、N2、N3这三个点4 点击trim按钮,将最前面一小块实体分割出来。
5 重复此切割操作,按图所示,选择切割平面上的N1、N2 、N3点,把几何体切割成最终可以顺利划分网格的形式。
第五步:进行几何清理,使每一块实体都成为可映射形式。
1 选择几何的显示模式,以Mappable(是否可映射)显示。
2 点击F11快捷键,进入几何编辑面板。
3 激活toggle edge后面的黄色按钮,然后鼠标左击图中的曲线。
这一块实体便成为了可映射的形式。
Hypermesh四面体网格划分
Hypermesh四面体网格划分Hypermesh四面体网格划分Hypermesh四面体网格划分1.长按ctrl键后,左键,旋转,,中间键,缩放,,右键,移动,放大后的图像按F字母键可以恢复原来的大小。
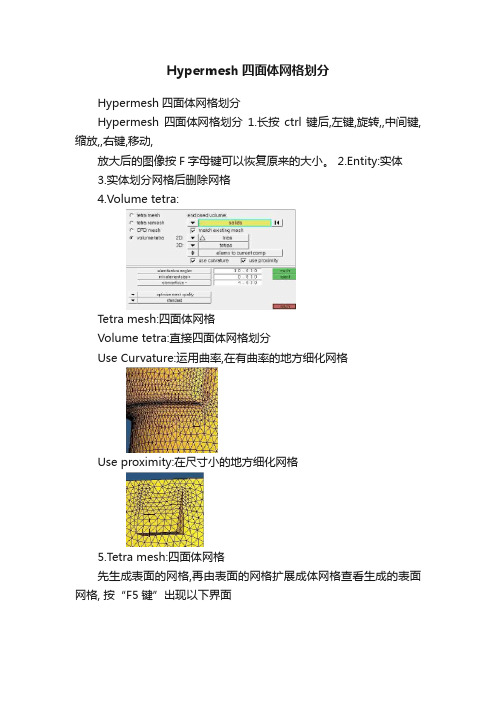
2.Entity:实体3.实体划分网格后删除网格4.Volume tetra:Tetra mesh:四面体网格Volume tetra:直接四面体网格划分Use Curvature:运用曲率,在有曲率的地方细化网格Use proximity:在尺寸小的地方细化网格5.Tetra mesh:四面体网格先生成表面的网格,再由表面的网格扩展成体网格查看生成的表面网格, 按“F5键”出现以下界面Shift+左键,选中一部分,选中的部分变白按“mask”键,出现下图,按“unmask all”恢复。
6.shift+F5:7.F10键,检查窗口Warpage:翘曲aspect:长宽比skew:扭曲tet collapse,塌陷Vol skew:空间扭曲Min angle:最小角Max angle:最大角8.塌陷部分重新划分,即有缺陷的网格部分,,F10---save failed,然后切换到F5键---elems,单元,---retrieve,调出保存的图形,---reverse,选中合格的单元,---mask,隐藏,只剩下有缺陷的单元Tool---find,工具框,---find attached---选中一部分---find键3D---tetra remesh---elems,displayed,---remesh9.快速网格划分,需自己设置参数,,Utility---Geom/Mesh---Quick TetraMesh 点开components选择要划分的部分10.流程树网格划分,打开流程树Create New:创建新的Load Existing:载入已经存在的流程树如下,。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于HyperMesh实体单元网格划分
运用HyperMesh 中的3D 实体单元网格划分的多种功能,介绍了几种典型几何特征的划分思路,为以后进行类似网格划分工作提供参考,同时也验证了HyperMesh 在划分实体网格方面的强大功能。
1 概述
计算机辅助工程(CAE)在汽车行业应用已有很多年了,许多有限元理论及软件都得到了成熟运用。
在众多软件中美国 Altair公司的HyperMesh是其中的佼佼者。
像在板壳单元、实体单元、焊接单元等的创建,以及与其它软件的接口等方面,都能表现出良好的性能。
其中尤其是在实体单元的划分方面有其独特的优势,以下将通过几个比较典型的实例来详细说明,同时也可以为以后再进行类似工作提供解决思路。
2 实例描述
2.1 座椅垫实体几何的网格划分
本例将通过一套座椅垫实体网格划分来介绍在HyperMesh8.0中新增加的处理实体几何的功能。
如图1所示是一套座椅垫,原始几何只有外表面的一层壳几何,而且几何形状也不规则,在以前不能处理实体几何的时候,一般处理方法是首先几何清理,然后通过添加一些辅助面构成封闭壳体,再根据经验把大块儿体分成相对较规则的若干小块儿,最后可以运用3D子面板中的Solid map-general或Linear solid 等工具先把各个小块儿划分网格,然后再把各个小块缝合到一起。
这样做的不足是一方面需要做大量的辅助面,另一方面在划分各个小块儿时需要考虑最后缝合时的节点对应问题。
通过观察几何模型发现,虽然座椅垫几何形状不规则,但它没有局部突出或相贯的几何特征,所以可以考虑把板壳几何封闭后生成实体几何,再通过几何清理后得到如图2所示的几何体,运用3D子面板中的Solid map- volume工具,设置好相关参数后就可以自动划分出以六面体为主五面体为辅的实体网格。
而且软件自动划分的网格能够完全与几何贴合,网格质量还比较好,只需稍微调整一下后就可以全部达到网格质量要求。
现在整个过程所花费的时间比以前要节省70%以上。
2.2 考虑油道特征的连杆实体网格划分
以下将通过某发动机连杆的实体网格划分实例,简单介绍一下不连续特征处的过渡处理方法。
如图3所示是某发动机连杆总成划分后的实体网格图,连杆本身体积很小但其上布置的几何特征却很多,考虑到该连杆大部分特征都是对称的,所以确定划分思路为,先取连杆带油道特征的四分之一部分划分实体网格,然后把不对称的局部特征重新修改,最后把四块儿缝合到一起。
取出四分之一连杆后再观察其特点发现,两头特征比较复杂中间过渡比较平缓,所以决定把四分之一连杆从中间断开,由中间断面先向大头部分划分,之后用中间断面已存在的面网格向小头部分划分。
在由中间断面向大头部分划分的过程中,如图4、5所示需要经过油道特征的过渡,即要考虑连杆外表面的平滑过渡又要保留油道特征的完整,所以此处的顺利过渡将是本次连杆实体网格划分工作的最大难点。
图6显示了一种划分思路,如图所示先把连杆外表面的特征曲线投影到对称中面上,在被分割的对称中面上划分壳网格,然后在划分好的面网格上割出油道平面特征线,最后在中间断面上划分合适的壳网格,注意在划分壳网格时要考虑到在经过油道时要切割许多六面体网格成五面体网格以得到油道特征,所以在划分壳网格时最好不要出现三角形单元,如果必须出现时也要避开需要切割的六面体单元的切割通路,这样就既可以实现所有单元都能够节点对应,又可以保证不出现四面体单元。
连杆其它不连续特征处的划分思路跟以上所述基本一致。
2.3 离合器壳相交特征实体网格划分
以下将通过某离合器壳的实体网格划分实例,简单介绍一下彼此相交特征处的连接处理方法。
如图7所示是某变速器总成中的离合器壳实体网格完成图,通过观察该离合器壳可以发现,其上的主要几何特征是彼此相交的。
像这种几何特征在实体几何中也是比较典型的,处理的主要思路是先把两个相交特征体各自独立完成实体网格划分,然后在相交截面上通过切割六面体为五面体来实现特征交接处的节点对应连接。
如图8所示是离合器拨插口与主壁面垂直相交的特征图,可以先把拨插口主特征面沿自己的主方向拉伸出规则的六面体单元,然后在拨插口与主壁面交接线上通过切割六面体单元为五面体单元来实现相交特征。
图9、10、11中的相交特征处理方式与图8所示特征处理方式类似。
如图12所示是离合器壳壁面不等高连接且图,按常规方法可以把交接面处六面体单元通路对角线切割成五面体单元通路,但是现在该处还有突起几何特征需要保留,不可能在壁面上找出全六面体单元的切割通路,通过观察可以发现该螺栓按装座孔凸起特征是对称的,如图中圈1所示沿特征底边切割一圈六面体单元到壳壁顶面如图中圈2所示,这样即可以保证不等高壁面连接的顺利过渡又可以满足螺栓按装座孔凸起特征的需要。
3 结论
通过以上三种比较典型零部件的实体网格划分方法,可以总结出一些有代表性的几何特征的处理思路:
如果实体几何如图1所示座椅垫、头枕等,没有不连续特征也没有相交、相贯复杂特征的时候,可以把实体几何做几何清理,只保留主要特征曲线,最后运用3D子面板中的Solid map-general-volume工具一次性自动生成实体网格;
如果实体几何如图5所示连杆油道处存在不连续特征时,可以先把不连续特征填充掉,如假设油道不存在,在划分实体网格所必须的辅助壳网格时,把不连续特征保留下来,等到最后实体网格划分好之后,再从实体网格上把不连续特征挖出来;
如果实体几何如图7所示离合器壳存在许多相交特征的时候,可以先把相交两实体几何各自划分网格,再在相交的截面上通过切割六面体网格为五面体网格的方法实现交接特征。
实体网格的划分没有一套固定方法,每一个案例都有自己独有的特征,而且可以通过各种不同的方法实现,主要是思路要清晰,还有就是要掌握一些比较典型几何特征的处理方式。