三相单三拍步进电机
数控机床电气传动 02四单元习题库(带答案)
单元四 步进驱动系统习 题一、单项选择(共17题,每题1分,共17分。
选择一个正确的答案,将相应的字母填入题内的括号中。
)1.步进电动机多相通电可以( A )A.减小步距角 B 增大步距角C.提高电动机转速D.往往提能高输出转矩2.步进电动机主要用于( A )A.经济型数控机床的进给驱动B.加工中心的进给驱动C.大型数控机床的进给驱动D.数控机床的主轴驱动3.可用于开环伺服控制的电动机是( D )A.交流主轴电动机B.永磁宽调速直流电动机C.无刷直流电动机D.功率步进电动机4.数控机床进给系统不能采用( D )电机驱动。
A.直流伺服B.交流伺服C.步进D.笼式三相交流5.在步进电机性能中,矩频特性是指( B )A.输出转矩与启动频率的关系B.输出转矩与运行频率的关系C.输入脉冲频率与电机运行频率的关系D.步进电机运行平稳性与频率的关系6.( C )是一种将电脉冲信号转换为机械角位移的机电执行元件。
A .交流电动机B .直流电动机C .步进电动机7.正常情况下步进电机的转速取决于( A )A.控制绕组通电频率B.绕组通电方式C.负载大小D.绕组的电流8.某三相反应式步进电机的转子齿数为50,其齿距角为( A )A.7.2°B.120°C.360°电角度D.120°电角度9.某四相反应式步进电机的转子齿数为60,其步距角为( A )A.1.5°B.0.75°C.45°电角度D.90°电角度10.某三相反应式步进电机的初始通电顺序为C B A →→,下列可使电机反转的通电顺序为( A )A.A B C →→B.A C B →→C.B C A →→D.C A B →→11.下列关于步进电机的描述正确的是( C )A.抗干扰能力强B.带负载能力强C.功能是将电脉冲转化成角位移D.误差不会积累12. 三相步进电动机的步距角是1.5°,若步进电动机通电频率为2000Hz,则步进电动机的转速为 ( B )r/min。
步进电机(计算)
Vj —— 第j个移动部件的移动速度 m/min Mj —— 第j个移动部件的质量 kg
2)步进电机选择步骤
② 计算惯量
i. 图示的一级齿轮减速系统
nz1 nz2
nm nz2
n V= z2 . t
式中 V——工作台移动速度 m/min
t——丝杆导程 m
3.某数控机床的进给伺服系统中,已知齿轮分度圆直径d1=64mm,d2=80mm, 齿轮宽度B=20mm,丝杠直径d3=40mm,长度l=1500mm,工作台质量 m=150kg。在某一时刻,齿轮转速n1=500r/min,n2=400r/min,工作台移动速 度v=2m/min,试求此系统转换到电动机轴上的等效转动惯量。
0.005 360
i=
=
导程 θ
4 0.75
3 = 0.6 =
5
所以,减速器传动比为 3:5。
返回
2、如图示,一台五相十拍运行的步进电动机,通过一对减速齿轮,滚珠丝杠 副带动工作台移动。齿轮1的齿数选定为Z1=27,步进电动机转子转子齿数 Zr=48,并设定步进电动机每走一步,工作台移动5μm。当丝杠导程t=4mm, 时,试求齿轮2的齿数Z2。
上一页 下一页
4.步进电机的选择
1)步进电机选择原则: ① 步矩角与机械系统相匹配,以得到系统所需的
= t/360 i
② 保证电机输出转矩,大于负载所需转矩
③ 能与机械系统的负载惯量相匹配 为使电机具有良好的起动性能及较快的响应速度
推荐 Jleq/Jm<=4 式中 Jleq为系统等效负载转动惯量
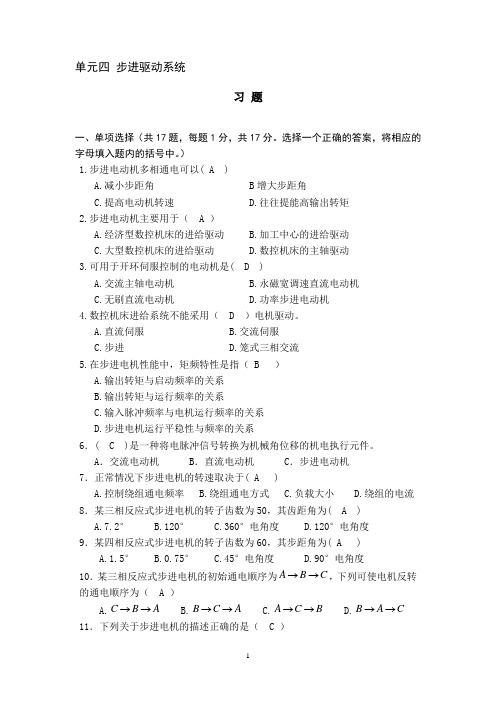
开环伺服系统
一、组成 伺服驱动单元、执行元件、传动机构
步进电机单三拍通电方式的基本原理

步进电机单三拍通电方式的基本原理随着生产过程机械化、电气化和自动化的不断发展,出现了各种类型的特种电动机。
这些电动机的工作原理,一般与普通的异步电动机和直流电动机的基本原理近似,但是它们在性能、结构、生产工艺上各有其特殊性,多用于自动控制过程中。
一般来说,这些电动机的功率不大,小的只有几分之一瓦,大的也不过几十瓦或几百瓦,属于微型电动机的范围。
步进电动机一般电动机都是连续旋转,而步进电动却是一步一步转动的,故叫步进电动机。
每输入一个冲信号,该电动机就转过一定的角度(有的步进电动机可以直接输出线位移,称为直线电动机)。
因此步进电动机是一种把脉冲变为角度位移(或直线位移)的执行元件。
步进电动机的转子为多极分布,定子上嵌有多相星形连接的控制绕组,由专门电源输入电脉冲信号,每输入一个脉冲信号,步进电动机的转子就前进一步。
由于输入的是脉冲信号,输出的角位移是断续的,所以又称为脉冲电动机。
随着数字控制系统的发展,步进电动机的应用将逐渐扩大。
步进电动机的种类很多,按结构可分为反应式和激励式两种;按相数分则可分为单相、两相和多相三种。
图1 反应式步进电动机的结构示意图图1是反应式步进电动机结构示意图,它的定子具有均匀分布的六个磁极,磁极上绕有绕组。
两个相对的磁极组成一组,联法如图所示。
下面介绍反应式步进电动机单三拍、六拍及双三拍通电方式的基本原理。
一、单三拍通电方式的基本原理设A相首先通电(B、C两相不通电),产生A-A′轴线方向的磁通,并通过转子形成闭合回路。
这时A、A′极就成为电磁铁的N、S极。
在磁场的作用下,转子总是力图转到磁阻最小的位置,也就是要转到转子的齿对齐A、A′极的位置(图2a);接着B相通电。
步进电机

主要缺点:效率较低,需配适当的驱动电源, 主要缺点:效率较低,需配适当的驱动电源,
带惯性负载的能力不强。 带惯性负载的能力不强。
种类: 种类: 磁阻式(反应式) 励 磁 方 式 永磁式 混合式
转子有多相磁极,而转子用软磁材料制成,三相 转子用永磁材料制成,这样可提高电机 的输出转矩,减少定子绕组的电流。两 相 两相、三相和五相
1 结构
步进电机主要由两部分构成:定子和转子。 步进电机主要由两部分构成:定子和转子。它们均 由磁性材料构成,其上分别有六个、 由磁性材料构成,其上分别有六个、四个磁极 。 定子绕组
反应式步进电机的定子上有 磁极, 磁极,每个磁极上有激磁绕 转子无绕组, 定子组,转子无绕组,有周向均 布的齿, 布的齿,依靠磁极对齿的吸 合工作。 合工作。如图所示为三相步 进电机,定子上有三对磁极, 进电机,定子上有三对磁极, 分成A、 、 三相 三相。 分成 、B、C三相。为简 化分析,假设转子只有4个 化分析,假设转子只有 个 齿。
以上三种工作方式, 以上三种工作方式,三相双三拍和三相单双六 拍较三相单三拍稳定,因此较常采用。 拍较三相单三拍稳定,因此较常采用。
2 步进电机的主要特性 2.1 步距角及其精度 指每给一个脉冲信号,电动机转子应转过角度的 理论值。它取决于电机结构和控制方式。步距角 可按下式计算:
根据结构分类 步进电机可制成轴向单段式和多段式。多段式又 称为轴向分相式,定子每相是一个独立的段,各 段只有一个绕组,结构完全相同,
1- 线圈
2- 定子
3-转子
三段式(三定子)轴向分相步进电机 三段式(三定子)
旋转励磁型5相步进电机 减速-制动复合型5相步进电机
步进电机不能直接接到直流或交流电源上工作,必须使用专用的驱动电源(步进电机驱动 步进电机不能直接接到直流或交流电源上工作,必须使用专用的驱动电源( )。控制器 脉冲信号发生器)可以通过控制脉冲的个数来控制角位移量, 控制器( 器)。控制器(脉冲信号发生器)可以通过控制脉冲的个数来控制角位移量,从而达到准 确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度, 确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调 速的目的。 速的目的。
步进电机的工作原理

a
3
步进电动机结构
步进电机主要由两部分构成:定子 和转子。它们均由磁性材料构成 。定、转子铁心由软磁材料或硅 钢片叠成凸极结构,定、转子磁 极上均有小齿,定、转子的齿数 相等。其中定子有六个磁极,定子 定子磁极上套有星形连接的三相 控制绕组,每两个相对的磁极为 一相,组成一相控制绕组,转子上 没有绕组。转子上相邻两齿间的
n6f06f036 0 s f (r/min
ZrN 36 Zr0 N 6
步距角一定时,通电状态的切换频率越高,即脉冲 频率越高时,步进电动机的转速越高。脉冲频率一 定时,步距角越大、即转子旋转一周所需的脉冲数
越少时,步进电动机的转速越高。
a
15
步进电机的矩频特性
步进电动机的输出转矩与控制脉冲频率之间的关
注意:步进电机通的 是直流电脉冲.
t
360 Zr
夹角称为齿距角
a
4
工作方式
步进电机的工作方式可分为:三相单三拍、三相单 双六拍、三相双三拍等。
一、三相单三拍
(1)三相绕组联接方式:Y 型 (2)三相绕组中的通电顺序为:
A相B相C相
通电顺序也可以为: A 相 C 相 B 相
a
5
(3)工作过程
A
B' 1 C'
系称为矩频特性
特点:
步进电动机矩频特性
下降曲线。以最 大负载转矩(启 动转矩)Tq为起 点,随着控制脉 冲频率增加,步 进电动机的转速 逐步升高、而带
负载能力却下降
a
16
步进电动机的驱动
步进电动机的驱动电源主要由脉冲发生器、脉冲分配器 和脉冲放大器(也称功率放大器)三部分组成。
a
17
步进驱动器与电机的接线
步进电机的工作原理及运行特性
步进电机的工作原理
当A相断电,B相 绕组通电时,磁阻 转矩吸引转子逆时 针方向转动30º, 即转子2、4磁极 与B相磁极对齐,
原理示意图
返回目录 运行特性 原理 课堂练习
步进电机的工作原理
,当B相断电,C 相绕组通电时,磁 阻转矩吸引转子再
逆时针方向转动 30º,使转子1、3 磁极与C相磁极对
齐,
B通电
BB’对2、4极 有拉力,转子2、 4极和B相对齐, 相对于AB通电
旋转了15°
原理示意图
返回目录 运行特性 原理 课堂练习
三相单双三拍运行方式:通电AB—B—BC—C—CA—A—AB
BC通电
BB’对2、4极 有拉力,CC’ 对1、3极有拉 力,转子停在 两拉力的平衡 位置,相对于 B通电旋转了
原理示意图
返回目录 运行特性 原理 课堂练习
步进电机的运行特点
一种通电状态转换到另一种通电状态称为 一拍,每一拍转子转过的角度称为步距角θs, 上述的通电方式称为三相单三拍运行,三相是指 定子为三相绕组,单是指每拍只有一相绕组通电, 三拍是指经过三次切换绕组的通电状态为一个循 环。 三相步进电动机运行方式:
每一拍转子转过的角度称为
,上述的通电方式
称为三相单三拍运行,三相是指定子为三相绕组,单是指
每拍只有一相绕组通电,三拍是指经过三次切换绕组的通
电状态为一个循环。
返回目录 运行特性 原理 课堂练习
课堂练习——电路图
下面题目 被选前, 你可选其 中一题作
答
1、说出步进电机的工作原理。 2、说出三相单三拍运行的运行特征。
返回目录 运行特性 原理 课堂练习
15°
原理示意图
之后是C通电—CA通电……总之,每 个循环周期有溜走六种通电状态,所 以称之为三相六拍,步距角为15°
步进电动机的通电方式

步进电动机的通电方式
假如步进电动机绕组的每一次通断电操作称为一拍,每拍中只有一相绕组通电,其余绕组断电,则这种通电方式称为单相通电方式。
三相步进电动机的单相通电方式称为三相单三拍通电方式。
假如步进电动机通电循环的每拍中都有两相绕组通电,则这种通电方式称为双相通电方式。
三相步进电动机采纳双相通电方式时,称为三相双三拍通电方式。
假如步进电动机通电循环的各拍中交替消失单、双相通电状态,则这种通电方式称为单双相轮番通电方式。
三相步进电动机采纳单双相轮番通电方式时,每个通电循环中共有六拍,因而又称为三相六拍通电方式。
一般状况下,m相步进电动机可采纳单相通电、双相通电或单双相轮番通电方式工作,对应的通电方式分别称为m相单m拍、m相双m拍或m相2m拍通电方式。
由于采纳单相通电方式工作时,步进电动机的矩频特性(输出转矩与输入脉冲频率的关系)较差,在通电换相过程中,转子状态不稳定,简单失步,因而实际应用中较少采纳。
下图是某三相反应式步进电动机在不同通电方式下工作时的矩频特性曲线。
明显,采纳单双相轮番通电方式可使步进电动机在各种工作频率下都具有较大的负载力量。
图不同通电方式时的矩频特性通电方式不仅影响步进电动机的矩频特性,对步距角也有影响。
一个m相步进电动机,如其转子上有z个小齿,则其步距角可通过下式计算:式中,k是通电方式系数。
当采纳单相或双相通电方式时,k=1;当采纳单双相轮番通电方式时,k=2。
可见,采纳单双相轮番通电方式还可使步距角减小一半。
步进电机的步距角打算了系统的最小位移,步距角越小,位移的掌握精度越高。
步进电机结构及工作原理简介

步进电机结构及工作原理简介(总2页)-本页仅作为文档封面,使用时请直接删除即可--内页可以根据需求调整合适字体及大小-此作为初始状态,设与A 转子齿为0号齿,由于B 步进电机结构简介按照励磁方式分类,步进电机可分为反应式、永磁式和感应子式。
其中反应 式步进电机用的比较普遍,结构也较简单。
本课题采用的也是此类电机。
反应式步进电机又称为磁阻式步进电机,其典型结构如图1所示。
这是一台 三相电机,定子铁心由硅钢片叠成,定子上有6个磁极,每个磁极上又各有5 个均匀分布的矩形小齿。
三相电机共有三套定子控制绕组,绕在径向相对的两 个磁极上的一套绕组为一相。
转子也是由叠片铁心构成,转子上没有绕组,而 是由40个矩形小齿均匀分布在圆周上, 相邻两齿之间的夹角为9度。
下面简述其工作原理。
当某相绕组通 电时,对应的磁极就会产生磁场,并与转 子形成磁路。
若此时定子的小齿与转子的 小齿没有对齐,则在磁场的作用下,转子 转动一定的角度使转子齿与定子齿对应。
由此可见,错齿是促使步进电机旋转的根, 本原因。
例如,在单三拍运行方式中,当 A 相控制绕组通电,而B 、C 相都不通电 时,由于磁通具有力图走磁阻最小路径的 特点,所以转子齿与A 相定子齿对齐。
若以 相磁极中心磁极的 图1步进电机剖面结构相磁极与A 相磁极相差120度,且120度/9度二不为整数,所以,此时13号转 子齿不能与B 相定子齿对齐,只是靠近B 相磁极的中心线,与中心线相差3 度。
如果此时突然变为B 相通电,而A 、C 相都不通电,则B 相磁极迫使13号 小齿与之对齐,整个转子就转动3度。
此时称电机走了一步。
同理 我们按照A-BfC-A 顺序通电一周,则转子转动9度。
转速取决于 各控制绕组通电和断电的频率(即输入脉冲频率),旋转方向取决于控制绕组 轮流通电的顺序。
如上述绕组通电顺序改为A-C T B-A ……则电机转向相反。
这种按A T B-C-A •…方式运行的称为三相单三拍,“三相”是指步进电机具 有三相定子绕组,“单"是指每次只有一相绕组通电,“三拍"是指三次换接为一个 循环。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单片机驱动三相单三拍步进电机仿真设计关于单片机驱动三相单三拍步进电机仿真设计
随着生产过程机械化、电气化和自动化的不断发展,出现了各种类型的特种电动机。
这些电动机的工作原理,一般与普通的异步电动机和直流电动机的基本原理近似,但是它们在性能、结构、生产工艺上各有其特殊性,多用于自动控制过程中。
一般来说,这些电动机的功率不大,小的只有几分之一瓦,大的也不过几十瓦或几百瓦,属于微型电动机的范围。
步进电动机
一般电动机都是连续旋转,而步进电动却是一步一步转动的,故叫步进电动机。
每输入一个冲信号,该电动机就转过一定的角度(有的步进电动机可以直接输出线位移,称为直线电动机)。
因此步进电动机是一种把脉冲变为角度位移(或直线位移)的执行元件。
步进电动机的转子为多极分布,定子上嵌有多相星形连接的控制绕组,由专门电源输入电脉冲信号,每输入一个脉冲信号,步进电动机的转子就前进一步。
由于输入的是脉冲信号,输出的角位移是断续的,所以又称为脉冲电动机。
随着数字控制系统的发展,步进电动机的应用将逐渐扩大。
步进电动机的种类很多,按结构可分为反应式和激励式两种;按相数分则可分为单相、两相和多相三种。
图1 反应式步进电动机的结构示意图
图1是反应式步进电动机结构示意图,它的定子具有均匀分布的六个磁极,磁极上绕有绕组。
两个相对的磁极组成一组,联法如图所示。
下面介绍反应式步进电动机单三拍的基本原理。
一、单三拍通电方式的基本原理及本设计的要求
设A相首先通电(B、C两相不通电),产生A-A′轴线方向的磁通,并通过转子形成闭合回路。
这时A、A′极就成为电磁铁的N、S极。
在磁场的作用下,转子总是力图转到磁阻最小的位置,也就是要转到转子的齿对齐A、A′极的位置(图2a);接着B相通电(A、C 两相不通电),转了便顺时针方向转过30°,它的齿和C、C′极对齐(图2c)。
不难理解,当脉冲信号一个一个发来时,如果按A→C→B→A→…的顺序通电,则电机转子便逆时针方向转动。
这种通电方式称为单三拍方式。
图2 单三拍通电方式时转子的位置
采用单片机控制一个三相单三拍的步进电机工作。
步进电机的旋转方向由正反转控制信号控制。
步进电机的步数由键盘输入,可输入的步数分别为3、6、9、12、15、18、21、24和27步,且键盘具有键盘锁功能,当键盘上锁时,步进电机不接受输入步数,也不会运转。
只有当键盘锁打开并输入步数时,步进电机才开始工作。
电机运转的时候有正转和反转指示灯指示。
红色指示灯亮,同时警报响。
二步进电机仿真电路图
三仿真程序
#include <reg51.h>
#define unchar unsigned char
sbit kai_key p3^1; //开关,作锁功能sbit zheng_key p3^2; //正转
sbit fan_key p3^3; //翻转
sbit 18_key p1^0; //18步
sbit 15_key p1^1; //15步
sbit 12_key p1^2; //12步
sbit 9_key p1^3; //9步
sbit 6_key p1^4; //6步
sbit 3_key p1^5; //3步
sbit 21_key p1^6; //21步
sbit 24_key p1^7; //24步
sbit 27_key p3^0; //27步
bit flag=0; //电机正反标志位
uchar bushu,maichong=3,table_begin=0;
uchar code table[]={0x01,0x02,0x04,0x04,0x02,0x01};
//电机正反转I/O口的高低电平对应表
void delay(uchar i) //延时函数
{
uchar j,k;
for(j=i;j>0;j--)
for(k=125;k>0;k--);
}
void key()
{
//kaikey=shuo_key;
if(kai_key==0) //这里开关闭合,表示键盘锁打开。
如果开关不闭合,表示上锁,电机不转
{
if(27_key==0) bushu=27; //步数高的优先,即多个步数开关同时打上,运行高步数
else if(24_key==0) bushu=24;
else if(21_key==0) bushu=21;
else if(18_key==0) bushu=18;
else if(15_key==0) bushu=15;
else if(12_key==0) bushu=12;
else if(9_key==0) bushu=9;
else if(6_key==0) bushu=6;
else if(3_key==0) bushu=3;
esle bushu=0;
}
if(zheng_key==0)
flg=0;
else if(fan_key==0)
flg=1;
}
void dispose() //数据处理函数
{
if(flag==0)
{
table_begin=0; //flag为0正转
}
else
table_begin=3; //flag为1反转
}
void qudong()
{
while(kai_key==0)
{
while(bushu!=0)
{
unchar i,j;
for(j=0+table_begin;(j<3+table_begin)&&(bushu!=0);j++)
{
PO=table[j]
for(i=0;i<maichong;i++)
{
delay(10) //延时函数,控制电机速度
}
bushu--;
}
}
}
}
void main()
{
while(1)
{
key();
dispose();
qudong();
while(kai_key==0); //等待开锁
}
}
四、步进电动机的驱动电源
步进电动机需配置一个专用的电源供电,电源的作用是让电动机的控制绕组按照特定的顺序通电,即受输入的电脉冲控制而动作,这个专用电源称为驱动电源。
步进电动机及其驱动电源是一个互相联系的整体,步进电动机的运行性能是由电动机和驱动电源两者配合所形成的综合效果。
1、对驱动电源的基本要求
(1)驱动电源的相数、通电方式和电压、电流都工满足步进电动机的需要;
(2)要满足步进电动机的起动频率和运行频率的要求;
(3)能最大限度地抑制步进电动机的振荡;
(4)工作可靠,抗干扰能力强;
(5)成本低、效率高、安装和维护方便。
2、驱动电源的组成
步进电动机的驱动电源基本上由脉冲发生器、脉冲分配器和脉冲放大器(也称功率放大器)
(1)脉冲发生器
脉冲发生器是一个脉冲频率由几赫到几十千赫可连续变化的脉冲信号发生器。
脉冲发生器可以采用多种线路,最常见的有多谐振荡器和单结晶体管构成的张弛振荡器两种,它们都是通过调节电阻R和电容C的大小来改变电容器充放电的时间常数,以达到改变脉冲信号频率的目的。
图6是两种实用的多谐振荡电路,它们分别由反相器和非门构成,振荡频率由RC决定,改变R值即可改变脉冲频率。
这个仿真设计中直接由单片机的p0口输出4组p wm驱动电机。
五.总结
这课程设计,花了整整一个星期的时间,在这些天里从仿真电路图到程序的设计查阅了不少资料,巩固了了以前所学的知识以及没学到的知识。
特别在程序的设计中,一遍一遍的修改程序,调试,再修改,发现错误,让我的c语言有了很大的进步。
通过这次课程设计使我懂得了实际和理论相结合是很重要的,只有理论知识是远远不够的,只有把所学的理论与实践相结合起来,从理论中得出结论,才能提高自己的实际动手能力和独立思考能力。