光电转速传感器的转速测量实验
传感器设计实验―光电测转速甄选
传感器设计实验―光电测转速甄选光电测转速是一种常用的传感器,它可以通过感应旋转物体上的标记物来测量转速。
本实验旨在设计一种光电测转速传感器,以实现稳定准确的转速测量。
1.实验原理:光电测转速传感器的工作原理是利用旋转物体上的凹凸标记物经过传感器时产生光电信号,通过测量信号的频率来确定转速。
标记物可以是黑色和白色的交替环,当光电传感器检测到黑色时输出一个低电平信号,检测到白色时输出一个高电平信号。
通过计数器测量高低电平信号的频率,即可得到旋转物体的转速。
2.实验材料:-光电传感器模块-旋转物体(如风扇叶片)- Arduino开发板-连接线-电源供应器3.实验步骤:(1)搭建电路连接:将光电传感器模块的输出引脚连接到Arduino开发板的数字引脚上,光电传感器模块的供电引脚连接到电源供应器的正极,接地引脚连接到电源供应器的负极。
(2)编写Arduino代码:使用Arduino开发环境编写程序。
程序需要包括以下几个部分:-初始化:定义输入输出引脚,设定计数器初值;-中断函数:当光电传感器模块输出引脚发生电平变化时,中断函数将触发,并在函数中进行计数器增加或减少的操作;-主循环:显示计数器数值,以转速的形式输出。
(3)上传代码并测试:将编写好的代码上传到Arduino开发板上,然后将光电传感器模块与旋转物体相对应。
启动电源供应器后,通过监视器观察计数器数值的变化,并实时显示转速。
4.实验注意事项:-在选择旋转物体时,要确保标记物的凹凸度适中,以确保光电传感器的稳定输出;- 在选择光电传感器模块时,注意其输出引脚的电压和电平状态,以确保和Arduino开发板的兼容性;-在编写程序时,要特别注意中断函数的编写,确保计数器能够正常累加或减少。
通过上述实验步骤,设计并调试光电测转速传感器,可以实现稳定准确的转速测量。
这种传感器在许多领域都有广泛的应用,如工业自动化生产线、电机控制、车辆控制等,对于实现精确的转速控制和监测具有重要作用。
实验四光电传感器转速测量实验
实验四、光电传感器转速测量实验一、实验目的1.通过本实验了解和掌握采用光电传感器测量的原理和方法。
2. 通过本实验了解和掌握转速测量的基本方法。
二、实验原理直接测量电机转速的方法很多,可以采用各种光电传感器,也可以采用霍尔元件。
本实验采用光电传感器来测量电机的转速。
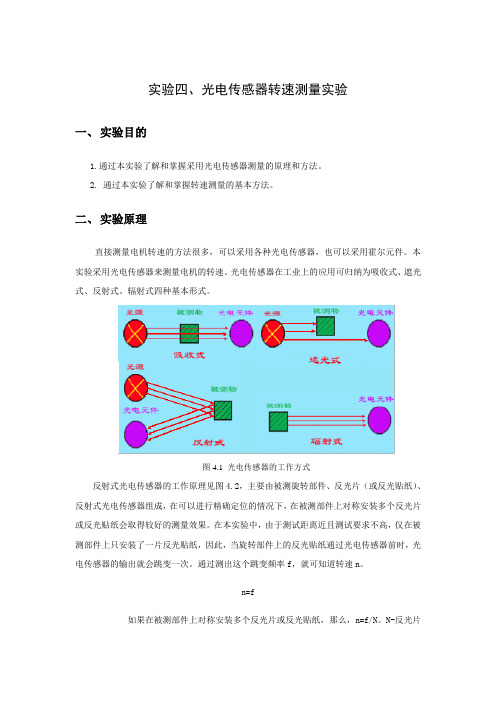
光电传感器在工业上的应用可归纳为吸收式、遮光式、反射式、辐射式四种基本形式。
图4.1 光电传感器的工作方式反射式光电传感器的工作原理见图4.2,主要由被测旋转部件、反光片(或反光贴纸)、反射式光电传感器组成,在可以进行精确定位的情况下,在被测部件上对称安装多个反光片或反光贴纸会取得较好的测量效果。
在本实验中,由于测试距离近且测试要求不高,仅在被测部件上只安装了一片反光贴纸,因此,当旋转部件上的反光贴纸通过光电传感器前时,光电传感器的输出就会跳变一次。
通过测出这个跳变频率f,就可知道转速n。
n=f如果在被测部件上对称安装多个反光片或反光贴纸,那么,n=f/N。
N-反光片或反光贴纸的数量。
图4.2 反射式光电转速传感器的结构图三. 实验仪器和设备1. 计算机 n台2. DRVI快速可重组虚拟仪器平台 1套3. 并口数据采集仪(LDAQ-EPP2) 1台4. 开关电源(LDY-A) 1台5. 光电转速传感器(LHYF-12-A) 1套6. 转子/振动实验台(LZS-A)/(LZD-A) 1 台四、实验步骤1、启动服务器,运行DRVI主程序,开启DRVI数据采集仪电源,然后点击DRVI快捷工具条上的"联机注册"图标。
2、点击实验脚本文件“服务器端”的链接,运行该实验。
如图4.3所示。
图4.3 转速测量实验(服务器端)效果图3、在电机转子侧面上贴上反光纸,将光电传感器探头对准反光纸,调节传感器后面的灵敏度旋钮至传感器对反光纸敏感,对其它部位不敏感,然后启动实验台,调节转速旋钮使电机达到某一稳定转速。
4、设定合适的门限值,点击面板中的"开关"按钮进行测量,观察并记录测量的转速值,调整传感器的位置,同时观察检测到的转速波形和传感器位置之间的关系,并分析由此带来的测量误差。
光电转速传感器的转速测量实验

光电转速传感器的转速测量实验一、实验原理光电转速传感器是一种基于光电效应的传感器,它通过检测旋转物体上的标记或孔洞来测量转速。
当旋转物体上的标记经过传感器的光路时,会遮挡或透过光线,从而使传感器输出的电信号发生变化。
通过对这些电信号的处理和分析,可以计算出旋转物体的转速。
光电转速传感器通常由光源、光学透镜、光电探测器和信号处理电路等部分组成。
光源发出的光线经过光学透镜聚焦后照射到旋转物体上,当旋转物体上的标记经过光路时,光电探测器接收到的光强会发生变化,产生相应的电信号。
信号处理电路对这些电信号进行放大、滤波和整形等处理,最终输出与转速成正比的脉冲信号。
二、实验设备1、光电转速传感器:选择合适的光电转速传感器,其性能参数如测量范围、精度、响应时间等应满足实验要求。
2、旋转平台:用于安装被测旋转物体,并提供稳定的旋转运动。
3、信号调理器:用于对传感器输出的电信号进行调理和放大,以便后续的数据采集和处理。
4、数据采集卡:将调理后的电信号转换为数字信号,并传输到计算机进行处理和分析。
5、计算机:安装有相关的数据采集和分析软件,用于控制实验过程、采集数据以及进行数据处理和分析。
三、实验步骤1、安装和连接设备将光电转速传感器安装在合适的位置,使其光路能够对准旋转物体上的标记。
将传感器的输出端连接到信号调理器的输入端,将信号调理器的输出端连接到数据采集卡的输入端。
将数据采集卡插入计算机的 PCI 插槽,并安装相应的驱动程序和软件。
2、调整传感器位置和光路调整传感器的位置和角度,使光路能够准确地照射到旋转物体上的标记,并确保光电探测器能够接收到足够强度的光信号。
使用遮光板或其他工具,检查光路的遮挡情况,确保光路畅通无阻。
3、设置实验参数在计算机上打开数据采集软件,设置采样频率、通道选择、触发方式等参数。
根据旋转物体的转速范围和测量精度要求,合理设置采样频率,以保证能够采集到足够数量的有效数据。
4、启动旋转平台打开旋转平台的电源,调整转速到预定值。
光电传感器实验报告(文档4篇)
光电传感器实验报告(文档4篇)以下是网友分享的关于光电传感器实验报告的资料4篇,希望对您有所帮助,就爱阅读感谢您的支持。
光电传感器实验报告第一篇实验报告2――光电传感器测距功能测试1.实验目的:了解光电传感器测距的特性曲线;掌握LEGO基本模型的搭建;熟练掌握ROBOLAB软件;2.实验要求:能够用LEGO积木搭建小车模式,并在车头安置光电传感器。
能在光电传感器紧贴红板,以垂直红板的方向作匀速直线倒车运动过程中进行光强值采集,绘制出时间-光强曲线,然后推导出位移-光强曲线及方程。
3.程序设计:编写程序流程图并写出程序,如下所示:ROBOLAB程序设计:4.实验步骤:1) 搭建小车模型,参考附录步骤或自行设计(创新可加分)。
2) 用ROBOLAB编写上述程序。
3) 将小车与电脑用USB数据线连接,并打开NXT的电源。
点击ROBOLAB 的RUN按钮,传送程序。
4) 取一红颜色的纸板(或其他红板)竖直摆放,并在桌面平面与纸板垂直方向放置直尺,用于记录小车行走的位移。
5) 将小车的光电传感器紧贴红板放置,用电脑或NXT的红色按钮启动小车,进行光强信号的采样。
从直尺上读取小车的位移。
6) 待小车发出音乐后,点击ROBOLAB的数据采集按钮,进行数据采集,将数据放入红色容器。
共进行四次数据采集。
7) 点击ROBOLAB的计算按钮,分别对四次采集的数据进行同时显示、平均线及拟和线处理。
8) 利用数据处理结果及图表,得出时间同光强的对应关系。
再利用小车位移同时间的关系(近似为匀速直线运动),推导出小车位移同光强的关系表达式。
5.调试与分析a) 采样次数设为24,采样间隔为0.05s,共运行1.2s。
采得数据如下所示。
b) 在ROBOLAB的数据计算工具中得到平均后的光电传感器特性曲线,如图所示:c) 对上述平均值曲线进行线性拟合,得到的光强与时间的线性拟合函数:d) 取四次实验小车位移的平均值,根据时间与光强的拟合函数求取距离与光强的拟合函数:由上图可得光强与时间的关系为:y=-25.261858×t+56.524457 ; 量取位移为4.5cm,用时1.2s,得:x=3.75×t ;光强与位移的关系为:y= -6.73649547×x+56.524457 ;e) 通过观测上图及导出的光强位移函数可知,光电传感器在短距离里内对位移信号有着良好的线性关系,可以利用光强值进行位移控制。
光电转速传感器的转速测量实验
光电转速传感器的转速测量实验
一、实验目的:
了解光电转速传感器测量转速的原理及方法。
二、实验仪器:
转动源、光电传感器、直流稳压电源、频率/转速表。
三、实验原理:
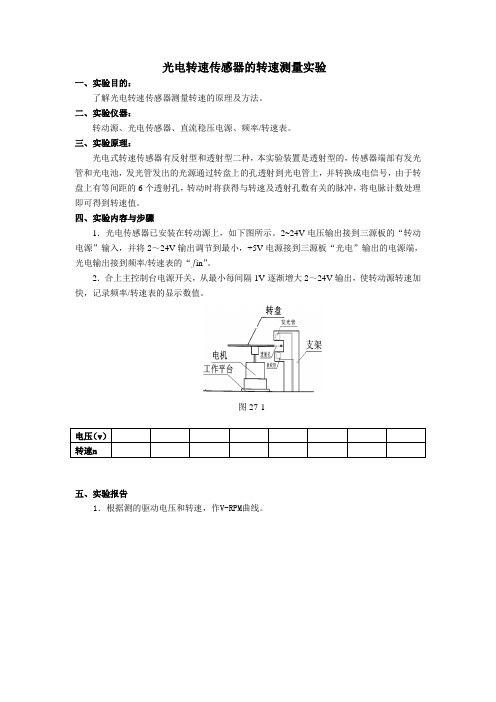
光电式转速传感器有反射型和透射型二种,本实验装置是透射型的,传感器端部有发光管和光电池,发光管发出的光源通过转盘上的孔透射到光电管上,并转换成电信号,由于转盘上有等间距的6个透射孔,转动时将获得与转速及透射孔数有关的脉冲,将电脉计数处理即可得到转速值。
四、实验内容与步骤
1.光电传感器已安装在转动源上,如下图所示。
2~24V电压输出接到三源板的“转动电源”输入,并将2~24V输出调节到最小,+5V电源接到三源板“光电”输出的电源端,光电输出接到频率/转速表的“f in”。
2.合上主控制台电源开关,从最小每间隔1V逐渐增大2~24V输出,使转动源转速加快,记录频率/转速表的显示数值。
图27-1
五、实验报告
1.根据测的驱动电压和转速,作V-RPM曲线。
光电传感器测转速

二、相关知识
光电转速传感器是开关式传感器的一种,我 们可以用它来测量电机的转速。光电转速传感 器是利用光的折射物理特性将光源和开关式传 感器结合在一起而组成的。
三、图形解析
四、工作原理
在电机主轴上涂有黑白两种颜色。当电机转 动时,反光与不反光交替出现,光电元件间断 的接收反射光信号,输出电脉冲,经放大电路 转换成方波信号,由数字频率表测得电机的转 速。
光电式传感器
开关式光电传感器的应用分析
目录
1 2 3 4 5
目标分析 相关知识 图形解析 工作原理 数据计算 系统特点
一、目标分析
开关式光电传感器又称脉冲式光电传感器。脉 冲式光电传感器受到光照射时,有电信号输出, 不受到光照时无电信号输出。这样便把被测量转 换成断续变化的光电流,它大多用于光机电相结 合的检测装置中。
五、数据计算
由脉冲频率可以求得电机的转速 公式 n=60f/z n为电机转速 f为光敏二极管接收到的频率 z为转轴上反光纸片数
六、系统特点
与传统的机械传感器相比,开关式光电传感器 具有灵敏度高、可靠性高、寿命长、触发距离 远的特点。 其中所要注意的问题有①选用硅光电二极管响 应时间短用于高频调制信号测量②数字测量, 不用参比信号。
Endຫໍສະໝຸດ
转速测量设计实验报告

转速测量设计实验报告1. 实验目的本实验旨在设计并实现一种测量转速的方法,并验证其准确性和稳定性。
2. 实验原理2.1 传感器原理转速测量一般需要通过传感器来实现。
常见的转速传感器有光电传感器、霍尔传感器和接触式触发器等。
本实验采用光电传感器作为转速测量的感知器件。
光电传感器通过发射红外光束,并根据反射光的变化来测量目标物体的运动速度。
2.2 转速计算方法根据光电传感器感知到的目标物体的运动情况,我们可以计算出目标物体的转速。
转速的计算方法如下:速度= \frac {2\pi r}{T}其中,速度为目标物体的线速度,r为目标物体的半径,T为目标物体绕轴旋转一周所需的时间。
3. 实验设计本实验的设计思路是在目标物体上固定一块白色圆片,并将光电传感器放在圆片的旁边。
光电传感器产生的红外光束会照射到圆片上,并由圆片反射回光电传感器。
当目标物体旋转时,圆片运动会导致光电传感器感受到反射光的变化。
我们通过记录光电传感器输出的电信号的变化来计算目标物体的转速。
实验所需材料如下:- 光电传感器- 白色圆片- 电路连接线- 示波器(或数字多用表)实验步骤如下:1. 将光电传感器固定在实验平台上,使其能够与目标物体保持一定的距离。
2. 将白色圆片固定在目标物体上,并使其与光电传感器处于同一平面。
3. 连接光电传感器的输出端和示波器(或数字多用表)。
4. 打开示波器(或数字多用表)并设置合适的测量范围。
5. 启动目标物体的旋转,记录光电传感器输出的电信号的变化。
6. 根据记录到的数据,计算目标物体的转速。
4. 实验结果与分析在实验中,我们通过示波器记录了光电传感器输出的电信号的变化,并根据这些数据计算了目标物体的转速。
实验结果显示,我们所设计的转速测量方法具有较高的准确性和稳定性。
在实际使用中,我们可以根据实验结果进行进一步优化和改进。
例如,可以根据目标物体的特性选择合适的感知器件,调整光电传感器和目标物体之间的距离,以及对于输出信号的处理等等。
6. 光电传感器转速测量实验

6. 光电传感器转速测量实验光电传感器是一种高精度、高速度的测量器,它可以精确地测量物体的旋转速度。
在机械工程和工业领域,光电传感器被广泛应用于转速测量、位置检测和控制系统中。
光电传感器分为两部分:发射器和接收器。
发射器通常是一个发光二极管,它将光束发射到被测物体上。
接收器通常是一个光敏二极管或光电二极管,可以测量被测物体上反射回来的光信号强度。
在光电传感器转速测量实验中,我们使用磁性喷泉作为被测物体,将光电传感器安装在喷泉的一侧,测量喷泉的旋转速度。
本实验的主要目的是利用光电传感器实现高精度的转速测量,掌握测量方法和技巧。
实验步骤:1.将光电传感器安装在磁性喷泉的一侧,并将信号线接入数据采集系统。
2.启动数据采集系统,选择合适的采样率和采集时间,并开始数据采集。
3.打开磁性喷泉,让其旋转起来,使测量结果更具代表性。
4.在数据采集结束后,将数据导入计算机,并进行数据分析和处理。
5.根据分析结果,计算出喷泉的旋转速度。
实验要点:1.在安装光电传感器时,要选择合适的位置和方向,确保传感器测量的光线能够正常照射到被测物体上。
2.在数据采集过程中,要保证采样率足够高,并消除采集环境中的干扰因素,如光线和磁场。
3.在数据分析和处理过程中,要正确地选择和运用相应的方法和技巧,确保得到准确的测量结果。
总结:光电传感器转速测量实验是一项重要的实践教学活动,它可以帮助学生理解光电传感器的工作原理和应用场景,提高实验操作和数据分析能力,同时也可以加深对传感器测量性能和精度的理解。
通过本实验的学习,学生能够掌握光电传感器的基本原理和使用方法,提高实验技能和科学素养,为未来的科研和工程实践打下坚实的基础。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
可编辑 光电转速传感器的转速测量实验报告
一、实验目的:
了解光电转速传感器测量转速的原理及方法。
二、实验仪器:
转动源、光电传感器、直流稳压电源、频率/转速表、示波器
三、实验原理:
光电式转速传感器有反射型和透射型二种,本实验装置是透射型的,传感器端部有发光管和光电池,发光管发出的光源通过转盘上的孔透射到光电管上,并转换成电信号,由于转盘上有等间距的6个透射孔,转动时将获得与转速及透射孔数有关的脉冲,将电脉计数处理即可得到转速值。
四、实验内容与步骤
1.光电传感器已安装在转动源上,如下图所示。
+5V 电源接到三源板“光电”输出的电源端,光电输出接到频率/转速表的“fin ”。
2.打开实验台电源开关,用不同的电源驱动转动源转动,记录不同驱动电压对应的转速,填入下表,同时可通过示波器观察光电传感器的输出波形。
图39-1
五、数据记录与分析
1、数据记录表格
驱动电压V(V)
4v 6v 8v 10v 12v 16v 20v 24v 转速n(rpm) 315 650 933 1295 1711 2404 2857 3282
2、用
电压(V )/V
转速(n )/r p m 光电转速传感器V-n 曲线图
可编辑 3、与霍尔测速传感器测得的曲线的比较
算得光电传感器与霍尔传感器的相对误差如下表所示
六、实验报告
1.根据测的驱动电压和转速,作V-n 曲线。
并与其他传感器测得的曲线比较。
霍尔传感器V-n 曲线图电压(V )/V 转速(n )/r p m。