B陀螺仪原理1基本特性05775
陀螺仪原理1基本特性

陀螺仪原理1基本特性陀螺仪是一种测量和操控物体旋转姿态和角速度的仪器。
它的原理基于陀螺的力矩和角动量守恒。
陀螺仪主要由陀螺和测量装置组成,其中陀螺是陀螺仪的核心部件,而测量装置用于测量陀螺的角速度和姿态。
陀螺的基本特性如下:1.稳定性:陀螺具有很高的稳定性,不受外力的干扰。
这是因为陀螺在转动过程中,会生成一个力矩,使得它的旋转轴保持不变。
这种稳定性使得陀螺仪能够准确地测量物体的旋转姿态和角速度。
2.精度:陀螺仪具有很高的精度,能够测量微小的角度变化和角速度。
3.抗干扰性:陀螺仪具有很强的抗干扰能力,可以排除外界的振动和加速度干扰。
这是通过使用惯性测量装置和滤波算法来实现的。
4.快速响应:陀螺仪能够快速地响应外界的变化,准确地反映物体的旋转姿态和角速度变化。
陀螺仪的工作原理如下:1.陀螺力矩:当陀螺旋转时,其转动轴总是保持不变。
这是因为旋转产生了一个力矩,使得陀螺的旋转轴始终与外界力矩的方向相同。
这个力矩称为陀螺力矩,它使得陀螺能够保持稳定的旋转。
2.角动量守恒:根据角动量守恒定律,陀螺的角动量大小和方向在没有外力作用下保持不变。
这意味着陀螺的旋转轴在转动过程中保持不变。
3.测量装置:测量装置通过测量陀螺的角速度和姿态来获取物体的旋转信息。
常见的测量装置包括陀螺仪芯片、加速度计、磁力计等。
这些装置能够感知陀螺的角速度和加速度,并通过信号处理和滤波算法将其转化为测量结果。
陀螺仪在许多领域都有广泛的应用,包括航空航天、导航、汽车行驶控制、无人机、手机电子稳定器等。
它的基本特性和工作原理使得其成为一种重要的测量和控制工具,可以提高系统的稳定性和精度。
随着技术的不断发展,陀螺仪的性能和应用范围还将进一步扩大。
陀螺仪的基本原理

■陀螺仪的基本原理关注Iphone4手机的网友们都知道,这款手机有一个超强的卖点就是内置了陀螺仪。
这玩意听着挺神秘的,原来一般出现的场合都是什么航天飞机、火箭、导弹之类的军事领域。
一提到它,就想起了高精尖武器,这会怎么就出现在手机上了呢?难道苹果的乔布斯帮主就不怕CIA以武器和军事技术扩散的名义,请他去喝咖啡吗?还有,手机又不是导弹,装这么一个玩意有什么用吗?难道让众多果粉们变成飞翔的塔利班,怀抱炸弹去袭击纽约?对于那些稍微了解陀螺仪的兄弟们来说,肯定也有一个问题,上一代Iphone中已经内置了重力感应,陀螺仪和重力感应有什么区别?为什么陀螺仪比重力感应要贵?要想回答这么多的问题,还真不容易,俺又不是乔帮主,没有通天彻地的能耐,更不会出了信号门还抵赖死不承认。
俺这里只是跟大家简要的说说陀螺仪的大概原理,还有一些在手机上可能的应用。
总的来说,只有两个请求:小白们可以看看,评论可以,拍砖的不要。
至于那些上知天文,下晓地理,鸡毛蒜皮无一不精的大能们,把俺归入到小白行列后,华丽飘过就行了。
好了,在恳切的告白后,下面进入正题。
陀螺仪到底是啥玩意?陀螺仪的原理说穿了很简单,物体在高速旋转后,其轴心就存在指向的稳定性。
我们日常生活中肯定见过小孩玩陀螺,只要陀螺在旋转,就能立着不倒,陀螺仪的名称也由此得来。
还有一个很经典的例子,就是自行车,它的两个车轮,在转起来后,也不太容易倒。
下面这张是陀螺仪的原理图,大家一看就能明白。
当然了,作为一种应用已经有接近百年历史的传感器,现代的陀螺仪当然不会那么简单。
一般来说,目前陀螺仪主要有两种,机械式的和光学式的,机械式的原理大家都看过了。
它最主要的问题就是加工难度很大,旋转轴的摩擦力必须特别小,对加工精度要求很高,另外,小型化也很困难,尤其是放到Iphone4当中,更是要充分的解决小型化的问题。
光学式陀螺仪有两种,干涉式陀螺仪和谐振式陀螺仪,它们都是根据塞格尼克的理论发展起来的。
陀螺仪的工作原理
陀螺仪的工作原理
陀螺仪是一种利用陀螺效应来测量和维持方向的仪器。
它的工作原理主要依靠陀螺效应,即当陀螺仪受到外力作用时,会产生一个垂直于外力方向的力矩,使得陀螺仪保持自身的方向不变。
在航空航天、导航、惯性导航、姿态控制等领域都有着广泛的应用。
陀螺仪的核心部件是陀螺,它是一个在空间中自由旋转的转子。
当陀螺仪受到外力作用时,陀螺会产生一个力矩来保持自身的方向不变。
这种力矩的产生是由于陀螺的角动量守恒定律,即当外力作用于陀螺时,陀螺会产生一个垂直于外力方向的力矩,使得陀螺保持自身的方向不变。
这就是陀螺效应的基本原理。
在陀螺仪中,通常会有三个陀螺安装在不同的轴上,分别是横滚轴、俯仰轴和偏航轴。
这样可以实现对飞行器的姿态、角速度和角加速度的测量和控制。
当飞行器发生姿态变化时,陀螺仪可以通过测量陀螺的角速度和角加速度来实现对姿态的控制和维持。
陀螺仪的工作原理还涉及到了光学、电子和微机技术。
通过激光干涉、光电检测和信号处理等技术手段,可以实现对陀螺仪的高精度测量和控制。
同时,利用微机技术可以对陀螺仪进行数据处理和算法优化,提高其性能和稳定性。
在实际应用中,陀螺仪可以用于飞行器的导航和姿态控制、船舶的航行和稳定控制、车辆的惯性导航和姿态稳定控制等领域。
通过对陀螺仪的精确测量和控制,可以实现对飞行器、船舶和车辆的精准导航和稳定控制,提高其性能和安全性。
总的来说,陀螺仪是一种利用陀螺效应来测量和维持方向的重要仪器,它的工作原理主要依靠陀螺效应和现代科技手段的结合。
通过对陀螺仪的研究和应用,可以实现对飞行器、船舶和车辆的精准导航和稳定控制,提高其性能和安全性。
B陀螺仪原理1基本特性

陀螺动力效应:陀螺力矩
外加力矩
M H
陀螺力矩:反作用力矩
M g H H
陀螺力矩的方向判断 陀螺力矩的作用对象
陀螺动力(稳定)效应,对外框架有效
陀螺动力(稳定)效应,对内框架无效
定轴性:不通电时转动基座
录像(61s):陀螺不通电时,转动基座
定轴性:通电后转动基座
录像(35s):通电后,转动基座
➢定轴性的相对性(二):章动现象
陀螺受冲击力矩时,自转轴将在 原来的空间方位附近作锥形振荡 运动
章动录像
录像(20s):二自由度陀螺的章动现象(转子减速后)
单自由度陀螺仪基本特性(一)
单自由度陀螺 ➢结构:只有一个(内)框架 ➢特点:转子轴只有一个自由度
和二自由度陀螺的定轴性比较
➢转子轴沿着 x 方向向对基座缺少 转动自由度。
M H
此即二自由度陀螺仪的进动方程
进动角速度的方向和大小
➢进动角速度的方向:最短路径法则 (H 沿着最短路径趋向 M)
➢进动角速度的大小:根据 M = ω×H,写成标量形式:
M = ω·H·sinθ
因此
ω = M /(H·sinθ)
进动角速度大小与外力矩的大小成正比,与转子的动量矩的大小成反比。
➢进动的“无惯性”
➢当基座沿着 x 方向旋转时: 转子轴被迫一起绕 x 旋转 转子轴仍尽力保持在原方位
转子和基座之间存在相互作用
基座对转子沿 x 轴施加力矩 转子轴将绕内框架轴 y 旋转 ➢结论:单自由度陀螺能敏感基 座在其缺少转动自由度的方向 (敏感轴 x 方向)上的转动
单自由度陀螺仪基本特性(二)
和二自由度陀螺的进动性比较
➢动量矩定理
dH M dt
陀螺仪的工作原理
陀螺仪的工作原理
陀螺仪是一种用来测量和维持方向的仪器,它在航空、航天、导航、船舶和车
辆等领域中都有着重要的应用。
那么,陀螺仪是如何工作的呢?本文将为您详细介绍陀螺仪的工作原理。
陀螺仪的工作原理主要基于刚体的角动量守恒定律。
当陀螺仪处于旋转状态时,它的转动轴会保持在一个固定的方向上,这就是陀螺仪的工作原理之一。
在陀螺仪内部,通常会有一个转子,当转子开始旋转时,由于角动量守恒定律的作用,转子的旋转轴将保持在一个固定的方向上,这就形成了陀螺仪的稳定性。
另外,陀螺仪还可以利用地球自转的惯性来进行导航。
地球自转会产生科里奥
利力,这种力会使陀螺仪的转子产生一个额外的进动力,从而使得陀螺仪的转子轴保持在一个固定的方向上。
利用这种原理,陀螺仪可以用来测量地球的自转速度和方向,进而实现导航的功能。
除此之外,陀螺仪还可以通过测量转子的进动角速度来确定自身的旋转角速度,从而实现姿态控制和稳定功能。
通过测量陀螺仪的输出信号,可以得到飞行器、船舶或车辆的旋转角速度,进而实现对其进行控制和稳定。
总的来说,陀螺仪的工作原理主要基于刚体的角动量守恒定律和地球自转的惯性。
通过利用这些原理,陀螺仪可以实现测量方向、导航、姿态控制和稳定等功能,为各种领域的应用提供了重要的技术支持。
希望本文能够帮助您更好地理解陀螺仪的工作原理,如果您有任何疑问或者需
要进一步了解,欢迎随时与我们联系。
谢谢阅读!。
陀螺仪原理PPT课件
.
3
.
4
.
5
微分(速率)陀螺仪工作原理
• 当载体绕Y轴有角速度ω时,载体将在Y轴上产生力 矩My。在My的作用下,使陀螺仪做趋向外力矩的 进动,即陀螺仪绕X轴转过β角,此时弹簧会在X轴 产生力矩,同理弹簧力矩
又使陀螺仪产生绕Y轴的进
动。随着β角增大,弹簧力
矩也逐渐增大。稳态时,
弹簧力矩所造成的进动角人人网仅提供信息存储空间仅对用户上传内容的表现方式做保护处理对用户上传分享的文档内容本身不做任何修改或编辑并不能对任何下载内容负责
陀螺仪原理
.
1
• 凡是绕回转体的对称高速旋转的物体都可称为 陀螺。
• 把高速旋转的陀螺安 装在一个悬挂装置上, 使陀螺主轴在空间具有 一个或两个转动自由度 ,就构成了陀螺仪。
• 陀螺仪有两个最主要的特征——稳定指向性和 进动性。
.
2
• 稳定指向性(定轴性):当转子绕其主轴 高速旋转是,不论陀螺仪的底座如何倾斜 或摇摆,陀螺仪主轴将在惯性空间保持方 位不变。
• 进动性:在外力矩的作用下,陀螺仪主轴 转动方向与外力矩方向垂直,叫做陀螺仪 的进动性。即若外力矩施加于外环轴,陀 螺仪将绕内环轴转动,施加于内环轴将绕 外环轴转动。
速度和旋转角速度一致,
此时弹簧力矩kβ与陀螺力
矩Hω相平衡,可得:
H
.
6
k
积分(转角)陀螺仪工作原理
• 积分陀螺仪时用来测量运动体转角的单自由度陀 螺仪。
• 当载体绕Y轴有角速度ω时,载体将在Y轴上产生 力矩My。在My的作用下,使陀螺仪做趋向外力矩 的进动,当框架有转
.
动角速度 时,阻尼装
置将产生一个与其成正
比的阻尼力矩Mc。当
陀螺仪原理
陀螺仪原理
陀螺仪是一种利用陀螺效应来测量和维持方向的仪器。
它的原理基于物体的角
动量守恒定律,通过旋转的陀螺来感知方向的变化。
陀螺仪的原理在航空航天、导航系统、惯性导航等领域有着广泛的应用。
首先,我们来了解一下陀螺效应。
当一个陀螺体在外力作用下发生偏转时,它
会产生一个与偏转方向垂直的陀螺力,这就是陀螺效应。
这个效应是由于陀螺体旋转时角动量守恒的结果,使得陀螺体在偏转时保持一定的方向,这就是陀螺仪原理的基础。
其次,陀螺仪的工作原理是通过测量陀螺体的角速度来确定方向。
当外部力使
得陀螺体发生偏转时,陀螺仪会感知到这个偏转,并通过测量陀螺体的角速度来确定偏转的方向和大小。
这样就可以实现对方向的测量和维持,使得陀螺仪可以在航空航天、导航系统等领域发挥重要作用。
陀螺仪的原理还可以通过惯性导航系统来加以应用。
惯性导航系统是一种利用
陀螺仪和加速度计来测量和维持方向的导航系统。
通过测量陀螺仪和加速度计的数据,可以确定物体的位置和方向,从而实现导航和定位的功能。
总的来说,陀螺仪的原理是基于陀螺效应和角动量守恒定律,通过测量陀螺体
的角速度来确定方向。
它在航空航天、导航系统、惯性导航等领域有着广泛的应用,可以实现对方向的测量和维持,是一种非常重要的仪器和技术。
陀螺仪的工作原理
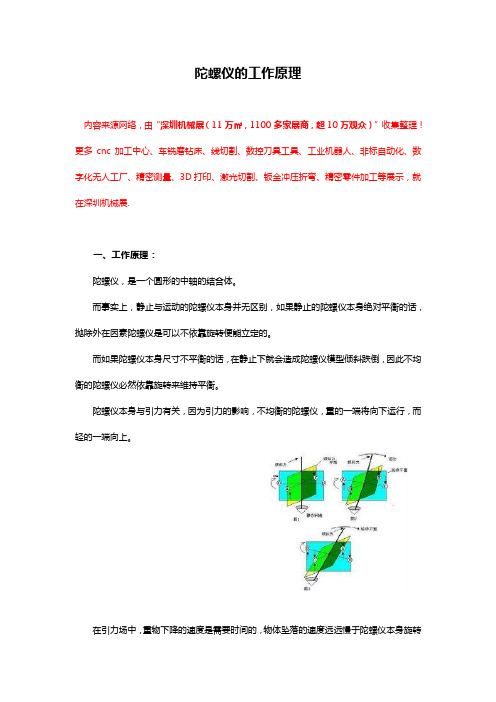
陀螺仪的工作原理内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理!更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展.一、工作原理:陀螺仪,是一个圆形的中轴的结合体。
而事实上,静止与运动的陀螺仪本身并无区别,如果静止的陀螺仪本身绝对平衡的话,抛除外在因素陀螺仪是可以不依靠旋转便能立定的。
而如果陀螺仪本身尺寸不平衡的话,在静止下就会造成陀螺仪模型倾斜跌倒,因此不均衡的陀螺仪必然依靠旋转来维持平衡。
陀螺仪本身与引力有关,因为引力的影响,不均衡的陀螺仪,重的一端将向下运行,而轻的一端向上。
在引力场中,重物下降的速度是需要时间的,物体坠落的速度远远慢于陀螺仪本身旋转的速度时,将导致陀螺仪偏重点,在旋转中不断的改变陀螺仪自身的平衡,并形成一个向上旋转的速度方向。
当然,如果陀螺仪偏重点太大,陀螺仪自身的左右互作用力也将失效!。
而在旋转中,陀螺仪如果遇到外力导致,陀螺仪转轮某点受力。
陀螺仪会立刻倾斜,而陀螺仪受力点的势能如果低于陀螺仪旋转时速,这时受力点,会因为陀螺仪倾斜,在旋转的推动下,陀螺仪受力点将从斜下角,滑向斜上角。
而在向斜上角运行时,陀螺仪受力点的势能还在向下运行。
这就导致陀螺仪到达斜上角时,受力点的剩余势能将会将在位于斜上角时,势能向下推动。
而与受力点相反的直径另一端,同样具备了相应的势能,这个势能与受力点运动方向相反,受力点向下,而它向上,且管这个点叫"联动受力点"。
当联动受力点旋转180度,从斜上角到达斜下角,这时联动受力点,将陀螺仪向上拉动。
在受力点与联动受力互作用力下,陀螺仪回归平衡。
〖专业解释〗我们不用一个完整的轮框,我们用四个质点ABCD来表示边上的区域,这个边对于用图来解释陀螺仪的工作原理是很重要的。
轴的底部被托住静止但是能够各个方向旋转。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
陀螺动力(稳定)效应,对内框架无效
定轴性:不通电时转动基座
录像(61s):陀螺不通电时,转动基座
定轴性:通电后转动基座
录像(35s):通电后,转动基座
定轴性:不通电时敲打框架
录像(26s) :不通电时,敲打框架
定轴性:通电后敲打框架
录像(35s) :通电后,敲打框架
定轴性总结;漂移、章动
机械转子式陀螺仪的概述
➢陀螺:一个绕对称轴高速旋转的飞轮 转子。 ➢陀螺仪:将陀螺安装在框架装置上, 使陀螺的自转轴有一定的转动自由度, 这种装置的总体。 ➢陀螺的基本部件
陀螺转子 内、外框架(支承部件) 附件(电机、力矩器、传感器等) ➢陀螺的分类(机械转子式) 二自由度 单自由度(速率、积分)
陀螺仪分类
M = ω·H·sinθ
因此
ω = M /(H·sinθ)
进动角速度大小与外力矩的大小成正比,与转子的动量矩的大小成反比。
➢进动的“无惯性”
陀螺动力效应:陀螺力矩
外加力矩
M H
陀螺力矩:反作用力矩
M g H H
陀螺力矩的方向判断 陀螺力矩的作用对象
陀螺动力(稳定)效应,对外框架有效
dH dH~ H M
dt dt
对实用陀螺仪 Jx = Jy = Je ,Je/Jz≈0.6
用动量矩定理解释进动:方程推导
因此 H J z k
相当于忽略了非自转动量矩, H 大小是一个常值,所以
~ dH 0 dt
可见外加力矩作用,不是改变
动量矩的大小,而只是改变了
➢二自由度陀螺仪的定轴性
二自由度陀螺仪具有抵抗干扰力矩, 力图保持其自转轴相对惯性空间方 位不变的特性(定轴性、或稳定 性)。
➢定轴性的相对性(一):陀螺漂移 ωd = Md / H
➢定轴性的相对性(二):章动现象
陀螺受冲击力矩时,自转轴将在 原来的空间方位附近作锥形振荡 运动
章动录像
录像(20s):二自由度陀螺的章动现象(转子减速后)
单自由度陀螺仪基本特性(一)
单自由度陀螺 ➢结构:只有一个(内)框架 ➢特点:转子轴只有一个自由度
和二自由度陀螺的定轴性比较
➢转子轴沿着 x 方向向对基座缺少 转动自由度。
➢当基座沿着 x 方向旋转时: 转子轴被迫一起绕 x 旋转 转子轴仍尽力保持在原方位
转子和基座之间存在相互作用
基座对转子沿 x 轴施加力矩 转子轴将绕内框架轴 y 旋转 ➢结论:单自由度陀螺能敏感基 座在其缺少转动自由度的方向 (敏感轴 x 方向)上的转动
H J xxi J yy j J z (z )k 它的方向,根据动量矩定理
转子自转角速度远大于进动角速度, 因此在 H 的表达式中
M H
此即二自由度陀螺仪的进动方程
进动角速度的方向和大小
➢进动角速度的方向:最短路径法则 (H 沿着最短路径趋向 M)
➢进动角速度的大小:根据 M = ω×H,写成标量形式:
单自由度陀螺仪基本特性(二)
和二自由度陀螺的进动性比较
➢ 沿着内框架轴施加力矩 My, 转子轴产生进动的趋势 ➢受基座阻碍,进动无法实现 ➢对基座产生压力 ➢基座产生反作用力 Fu ➢基座的反作用力形成力矩 Mx ➢力矩 Mx 使转子轴绕内框架轴 转动
单、双自由度 速率、积分
压电、微机械
二自由度陀螺仪进动性:演示
➢进动性
转子没有旋转时, 给陀螺悬挂重物
录像:转子高速旋转的陀螺悬挂重物
进动的规律
➢进动性:陀螺仪受到外力矩时,转子 自转轴的转动方向与外力矩方向相垂 直的现象
➢进动、进动角速度
录像:沿着陀螺仪外框架轴施加力矩
用动量矩定理解释进动:相dt
➢H 的表示
动坐标系:取内框架坐标系oxyz
动坐标系对惯性空间的角速度
xi y j zk
转子自转角速度:
转子的转动惯量:Jx, Jy, Jz,则
H J xxi J yy j J z (z )k
➢动量矩定理 + 苛氏转动坐标定理