基于ANSYSW0rkbench的焊接机器人大臂预应力模态分析
原创的ANSYS教材7机械手静力分析
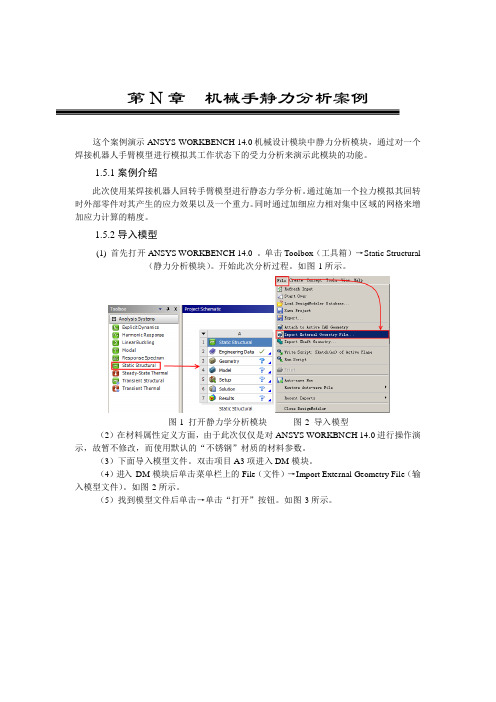
第N章机械手静力分析案例这个案例演示ANSYS WORKBENCH 14.0机械设计模块中静力分析模块,通过对一个焊接机器人手臂模型进行模拟其工作状态下的受力分析来演示此模块的功能。
1.5.1案例介绍此次使用某焊接机器人回转手臂模型进行静态力学分析。
通过施加一个拉力模拟其回转时外部零件对其产生的应力效果以及一个重力。
同时通过加细应力相对集中区域的网格来增加应力计算的精度。
1.5.2导入模型(1) 首先打开ANSYS WORKBENCH 14.0 。
单击Toolbox(工具箱)→Static Structural(静力分析模块)。
开始此次分析过程。
如图-1所示。
图-1 打开静力学分析模块图-2 导入模型(2)在材料属性定义方面,由于此次仅仅是对ANSYS WORKBNCH 14.0进行操作演示,故暂不修改,而使用默认的“不锈钢”材质的材料参数。
(3)下面导入模型文件。
双击项目A3项进入DM模块。
(4)进入DM模块后单击菜单栏上的File(文件)→Import External Geometry File(输入模型文件)。
如图-2所示。
(5)找到模型文件后单击→单击“打开”按钮。
如图-3所示。
图-3 打开模型文件图-4 刷新模型文件信息(6)模型导入DM模块后会在其Outline(分析树)产生一个Import 1 的图标。
在图标前方有一个小的黄色闪电符号,这说明这里的信息需要更新,向上单击Generate (刷新)按钮。
如图-4所示。
(7)经过几分钟后,模型刷新完毕。
如图-5所示。
图-5 导入后的模型图-6 保存并退出DM模块(8)完成模型文件导入后我们保存项目文件并退出DM 模块。
单击File(文件)→Save Project (保存项目文件)如图-6所示。
这时程序会自动弹出一个“另存为”对话框。
如图-7所示。
在合适的文件夹处将此次分析的项目文件命名为“1”→单击“保存”按钮。
然后回到DM模块继续单击File(文件)→Close Design Modeler(关闭Dm 模块)。
基于Ansys Workbench的CJ19024机床主轴实验模型振动力学分析
first 6 orders of the main shaft are obtained. The relationship between the front and end displace ̄
对于研究主轴系统的振动具有显著效果ꎬ同
时能够提高主轴系统的精度、强度ꎬ以及有效
地抑制主轴的共振 [11 - 15] . 因此ꎬ在静态分析
的基础上进行模态和谐响应分析ꎬ不仅能够
分析静力的应力、应变、静力负载等ꎬ也能研
究在静力负载下的各种响应ꎬ使其更能满足
现实情况的需要 [16 - 20] . 笔者以某公司的数控
tool spindle system. And the harmonic response of the experimental model is obtained. The natural
frequencies of the main axes at different temperatures are differentꎬand the first three natural fre ̄
CJ190Z4 数控机床的加工对象为轴类零件ꎬ
系统的实验模型ꎬ研究其在静动态特性下的
包括阶梯轴和非圆曲面的凸轮轴. CJ190Z4
各项响应ꎬ从而得到机床主轴的薄弱环节和
机床的主轴采用带通孔的阶梯形轴和两端支
振动情况的参数ꎬ分析结果能在产品设计阶
撑的结构. 加工过程中需要通过不断改变刀
段就能对主轴部件静、动态特性做出符合实
基于ANSYSWORKBENCH的颗粒机机架的模态分析
http : ZZ HD.chinaj ou rna.l n et .cn E m ai:l ZZHD @chai n aj ou rna.l n et .cn 机械制造与自动化作者简介:张元通(1974 ),男,江苏洪泽人,中学一级教师,硕士,研究方向为机械制造。
基于ANS YSWORKBE NC H 的颗粒机机架的模态分析张元通(洪泽县职教中心,江苏洪泽223100)摘 要:颗粒机机架的模态分析对于减少颗粒机的振动,防止颗粒机产生共振具有重要意义,利用AN SYS 软件对颗粒机机架进行了模态分析,得到了颗粒机机架的固有频率和振型云图,为颗粒机的进一步分析打下了基础。
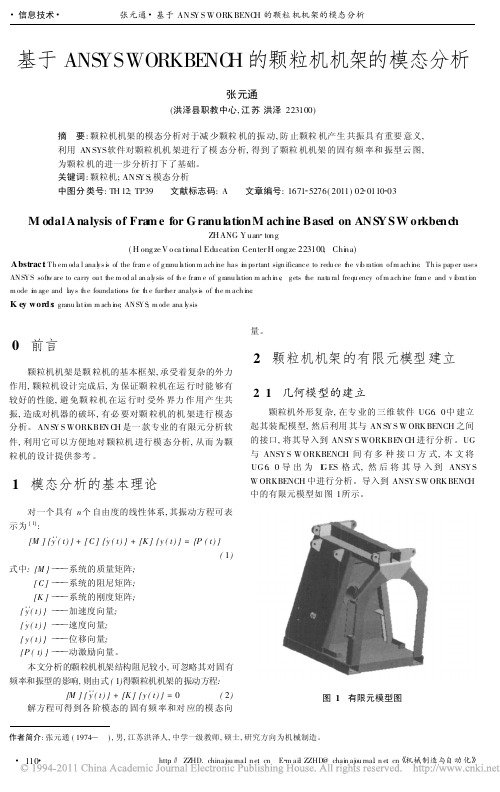
关键词:颗粒机;AN S Y S ;模态分析中图分类号:TH 12;TP39 文献标志码:A 文章编号:1671 5276(2011)02 0110 03M odal Analysis of Fra m e for G ranulationM achine Based on ANS YSW orkbenchZHANG Y uan tong(H ong ze V o ca ti ona l Educati on Center H ong ze 223100,Chi na)Abstrac t :Th em oda l anal ys i s of the fra m e of granu l ation m ach i ne has i m portant sign ificance to redu ce t he vi b ration ofm ach i ne .Th is pap er usesANSYS soft w are to carry ou t t he m od al an al ysis of t h e fra m e of granu l ation m ach i n e ,gets t he nat u ral frequ ency ofm ach i ne fra m e and v i brati on m ode i m age and l ays t h e foundations for t h e furt her analys i s of t he m ach i ne .K ey word s :granu l ati on m ach i ne ;ANSYS ;m ode ana l ysis0 前言颗粒机机架是颗粒机的基本框架,承受着复杂的外力作用,颗粒机设计完成后,为保证颗粒机在运行时能够有较好的性能,避免颗粒机在运行时受外界力作用产生共振,造成对机器的破坏,有必要对颗粒机的机架进行模态分析。
用Solidworks和ANSYS对微硬盘悬臂梁进行建模及模态分析

用Soli dworks和ANS Y S对微硬盘悬臂梁进行建模及模态分析周丹(攀枝花学院机电工程系,四川攀枝花617000)摘 要:用S olid works和ANSYS软件对微硬盘悬臂梁进行了建模、模态分析,利用理论分析和软件仿真相结合的方式对4.57cm微硬盘悬臂梁进行振动模态分析,通过对各阶固有频率下的振型的计算,找出微硬盘悬臂梁中的具有整体弯曲和大摆动的频率点,在进行结构设计和控制方面要避免这些频率点,从而提高微硬盘悬臂梁的整体性能。
关键词:ANSYS;有限元分析;微硬盘悬臂梁;模态分析中图分类号:TP391 文献标志码:B 文章编号:167125276(2009)0620180204M oda l Ana lysis and M odeli n g of M i cro Hard D isk D r i ver Suspen si on,Usi n g ANSY S and Soli dworksZHOU Dan(Pa nzh i hua I n s titu te,Pa nzh i hua617000,C h i na)Abstract:The Mo de li ng&Moda l a na l ys is of the m i c r o ha rd d isk d ri ve su spe n si o n w e re m a de by u s i ng So li dwo rks&AN SYS soft2 w a re,the a utho r com b i ne d the theo ry a na l ys is a nd the F i n ite E l em e n ts a na l ys is t o s tudy the vi bra ti o n Mo da l ana l ys is of the su sp en2 s i o n o f the1.8i nch m i c r o ha rd disk dri ve.B a sed o n the m ode shap e o f the na ti o na l freque ncy,f o r the sa ke of e nha nc i ng the w ho l e cap ab ility of the m i c r o ha rd d isk d ri ve,the a utho r f o und o ut the fre quency w h i ch have w ho l e be nd a nd gre a t sw i ng,a nd avo i de d th is fre que ncy i n con struc ti o n a nd co ntr o l of the e ngi nee ri ng p r o j e c t.Key words:AN S YS;F i n ite E l em e nt Ana l ys is(FEA);m i c r o ha rd d isk d ri ve r su sp en s i o n;f o unda ti o n0 前言随着便携式笔记本电脑的发展,越来越多的笔记本电脑已经走进日常生活。
基于ANSYS WORKBENCH的六自由度工业机器人摆动臂静力学分析与模态分析
收稿日期:2018-03-27基金项目:山西机电职业技术学院院级课题《基于ANSYS 的六自由度工业机器人研究》的阶段性成果(JKY-18006)作者简介:陈继文(1990 -),男,河南登封人,助教,硕士研究生,研究方向为机器人应用、超细水雾对瓦斯煤尘 爆炸的影响等。
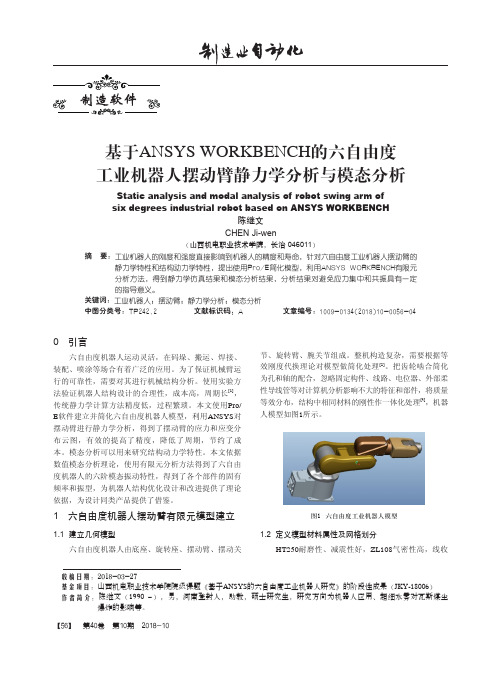
基于ANSYS WORKBENCH 的六自由度工业机器人摆动臂静力学分析与模态分析Static analysis and modal analysis of robot swing arm of six degrees industrial robot based on ANSYS WORKBENCH陈继文CHEN Ji-wen(山西机电职业技术学院,长治 046011)摘 要:工业机器人的刚度和强度直接影响到机器人的精度和寿命,针对六自由度工业机器人摆动臂的静力学特性和结构动力学特性,提出使用Pro/E简化模型,利用ANSYS WORKBENCH有限元分析方法,得到静力学仿真结果和模态分析结果,分析结果对避免应力集中和共振具有一定的指导意义。
关键词:工业机器人;摆动臂;静力学分析;模态分析中图分类号:TP242.2 文献标识码:A 文章编号:1009-0134(2018)10-0056-040 引言六自由度机器人运动灵活,在码垛、搬运、焊接、装配、喷涂等场合有着广泛的应用。
为了保证机械臂运行的可靠性,需要对其进行机械结构分析。
使用实验方法验证机器人结构设计的合理性,成本高,周期长[1],传统静力学计算方法精度低,过程繁琐。
本文使用Pro/E 软件建立并简化六自由度机器人模型,利用ANSYS 对摆动臂进行静力学分析,得到了摆动臂的应力和应变分布云图,有效的提高了精度,降低了周期,节约了成本。
模态分析可以用来研究结构动力学特性。
本文依据数值模态分析理论,使用有限元分析方法得到了六自由度机器人的六阶模态振动特性,得到了各个部件的固有频率和振型,为机器人结构优化设计和改进提供了理论依据,为设计同类产品提供了借鉴。
基于ANSYS的铁路起重机伸缩臂模态分析研究
图9 壁温历史数据
图10 特征值监控曲线
结果表明,在堵管情况,同屏管内的沿程阻力小
内圈管道)的管道流量增加幅度较大。
在管道堵管时,沿程壁温都会有不同程度的上升;设定监测单元,通过监测单元内的变化和正常值95%(或5%)分位数的数量
中国设备工程 2024.03(上)
图1 伸缩臂整体臂架有限元模型
整体伸缩臂臂架模态分析
有限元模态分析一般有两种方式:自由模态分析和约束模态分析,本文选择约束的方式对伸缩臂整体臂架进行模态分析。
在伸缩臂尾部与转台轴连接处和基本臂头部与变幅液压油缸的轴连接处施加约束,约束了三个方向上的平动自由度和两个方向上的转动自由度,仅释放伸缩臂沿连接轴的轴线方向上的转动自由度,从而更接近实际应用地模拟出伸缩臂的工作状态。
Workbench中Modal插件对伸缩臂整体臂架进行模态分析,通过分析得出伸缩臂整体臂架的前六阶固有频率和模态振型。
前六阶固有频率分别为
z、9.8977H z、13.673H z、17.
21.983Hz,模态振型图如图3~图8所示。
~图8可以看出:整体臂架的第一阶模态振型为整体臂架绕轴旋转弯曲;第二阶模态振型为整体臂架绕轴旋转弯曲;第三阶模态振型为整体臂架绕轴旋转,图2 伸缩臂有限元模型局部放大图
图3 整体臂架第一阶模态振型图
图4 整体臂架第二阶模态振型图
图5 整体臂架第三阶模态振型图
143
中国设备工程 2024.03(上)
图6 整体臂架第四阶模态振型图
图7 整体臂架第五阶模态振型图
图8 整体臂架第六阶模态振型图144中国设备工程 2024.03(上)。
基于ANSYSWorkbench的采摘机器人臂架模态分析_杨志敏

基于ANSYS Workbench的采摘机器人臂架模态分析杨志敏,周健,李立君,程学良(中南林业科技大学机电工程学院,长沙410004)摘要:介绍了采摘机器人臂架的结构特征;为了提高林果的采收效率,使采摘机器人具有更合理的结构和动态特性,以模态分析理论为基础,应用有限元分析软件ANSYS Workbench,建立了采摘机器人臂架的有限元模型;选取臂架的3种典型位姿,得出了其在不同位姿下的前6阶固有频率和振型,找出薄弱环节,提出了相应的改进方案,为臂架的进一步优化设计打下基础。
关键词:采摘机器人;臂架;ANSYS Workbench;模态分析中图分类号:TP242.3;S126文献标识码:A文章编号:1003-188X(2013)12-0056-030引言林果采收作业因其具有季节性强和劳动强度大等特点,成为林果生产过程中最重要的环节。
采收所用劳动力占整个生产过程所用劳动力的35% 45%[1]。
目前,国内从事果品收获机械化方面研究的科技工作者较少,加上其它种种原因,研究水平与国外先进水平相比尚有较大的差距。
本文针对目前最新设计研制的林果采摘机器人,以其臂架为研究对象,利用ANSYS Workbench软件,对处于不同位姿下的机器人臂架进行有限元模态分析,获得其固有频率和振型,找出臂架薄弱环节,为臂架的进一步优化设计打下基础。
1采摘机器人臂架结构特征采摘机器人臂架主臂部分的机构简图如图1所示。
其为两自由度机构,即水平底座和竖直底座的直线运动。
主臂1总体长720mm,中间铰接头在其1:5的比例处;主臂2长600mm;主臂3长780mm,中间铰接头同样在其1:5的比例处。
连接片长130mm。
主臂1、主臂2和主臂3与连接片形成平行四边形机构。
臂架机构的特点是当竖直底座不动而水平底座运动一个单位的距离时,主臂3末端沿水平同向运动6个单位的距离;当水平底座不动而竖直底座运动1个单收稿日期:2012-12-19基金项目:国家林业公益性行业科研专项(201104090);湖南省科技条件创新项目(2012TT2048)作者简介:杨志敏(1987-),男,湖南新化人,硕士研究生,(E-mail)shuilya123@163.com。
基于ANSYS_WORKBENCH的重型板式给料机结构静力学与模态分析
大连理工大学研究生院网络学刊NETWORK JOURNAL OF GRADUATE SCHOOL OF DUT基于WORKBENCH的重型板式给料机结构静力学与模态分析沈庆杰(大连理工大学机械工程学院,辽宁大连 116024)摘要:本文基于有限元方法,利用ANSYS/WORKBENCH软件对重型板式给料机结构进行静力学与模态分析。
得到了给料机主体钢结构的应力、变形以及前6阶固有频率和振型,可为进一步的结构优化和轻量化设计提供理论依据,具有一定的实际工程意义。
关键词:重型板式给料机;有限元;静力分析;模态分析;ANSYS/WORKBENCH中图分类号:TH228 文献标识码:A0 引言作为典型物流设备的重型板式给料机应用于矿山行业,主要承担运输作业,主体钢结构作为重型板式给料机的承载和支撑部件,其强度、弹性变形和动态特性直接影响设备的可靠性。
钢结构性能研究是一项非常繁琐的过程,其结构复杂、原件集合尺寸差异大,单纯的经验设计难以保证结构的可靠性,潜伏问题难以发现,因而传统的设计已经不能完全满足设计的需求。
随着计算机软件的不断开发,现代重要的结构设计大都采用弹性力学有限元法,使设计水平得到显著的提高[1]。
本文以某企业自移式破碎站的重型板式给料机主体钢结构为研究对象,对其进行静力与模态分析,对验证给料机主体钢结构强度和刚度要求;推断未测或难测部位的应力和变形状态;找出结构的薄弱环节并改进具有重要的理论参考和实践意义。
1有限元模型的建立本文研究的重型板式给料机主要承受两种工况:一种工况为给料机负载平稳运输物料且没有落料冲击链板;另一种工况为给料机在运输物料过程中落料冲击链板。
本文主要对第一种工况下的重型板式给料机主体钢结构进行静力学分析以及模态分析。
1.1三维模型的建立三维模型的建立是数值模拟分析中重要、关键的环节。
UG软件能够方便地建立复杂的三维模型,企业提供的初始的板式给料机三维模型主体钢结构是由不同厚度的钢板焊接而成,模型钢板之间存在较多的焊缝,导致模型存在不同大小的间隙,给后继有限元分析带来困难,而且模型结构复杂,且为三维实体,建立有限元模型的过程中,要在符合结构力学特性的前提下建立模型,有必要对结构做合理的简化。