2对2机器人足球比赛规则
机器人足球比赛的场地及用球规则

机器人足球比赛的场地及用球规则机器人足球比赛像人类足球比赛一样,也有相应的足球比赛规则,下面由店铺为大家介绍机器人足球比赛场地及用球规则,希望大家喜欢!机器人足球比赛场地和足球规则1.机器人足球赛台的球场区长1220mm、宽1830mm,球场四周有宽度为220mm的白色边界区。
边界区四周有宽80mm、深15~18mm的沟槽。
沟槽四周为高160mm、厚15~18mm的档板。
边界区及沟槽刷白色亚光漆,档板刷黑色亚光漆。
2.赛台中央的木质底板上覆盖一层喷绘的背胶场地纸。
绿色球场及白色边界区应水平和平整。
3.赛台应放置在约400mm高的桌上。
4.球门宽度为450mm,深度为80mm。
每个球门在距地面140mm处有一横梁。
球门 2 内有高度为80mm的后壁。
球门内侧涂成天蓝色,地面为白色。
球门外侧面应涂成亚光黑色。
2.5 场上有六个发球点和一个开球点5.场上有六个发球点和一个开球点。
6.参赛队必须根据场馆的照明和磁场条件调整机器人。
比赛组织者将尽力保持较低的照度,并使赛场远离磁场(比如,地板下的布线和金属物体)。
但是,建议各参赛队应设法让自己的机器人能适应各种照明和磁场干扰情况,并能应对场地表面大约5mm高的轻微起伏。
7.比赛采用能发射红外线的直径75~80mm的电子球。
每场开赛前,裁判都要检查足球是否损坏。
本届竞赛用球为Wiltronics制造的MK2红外球,或由日本EK公司制造的RoboSoccer RCJ-04足球。
这两种球均可用于比赛。
MK2红外球外壳较薄,参赛队必须控制机器人的动力,否则,损坏足球后可能会根据规则被罚出场或取消比赛资格。
足球机器人规则1.机器人必须是经参赛队员启动后能够自动运行的机器人,禁止使用任何遥控方式。
为了策略或备份的需要,每支参赛队可携带三台机器人参赛,但在同一场比赛中只能使用两台机器人且不能更换。
2.参加本比赛的机器人限用竞赛组委会指定的教育机器人套材。
只要有可能,也允许以上器材混用,允许自制机器人。
第六届浙江省青少年电脑机器人竞赛
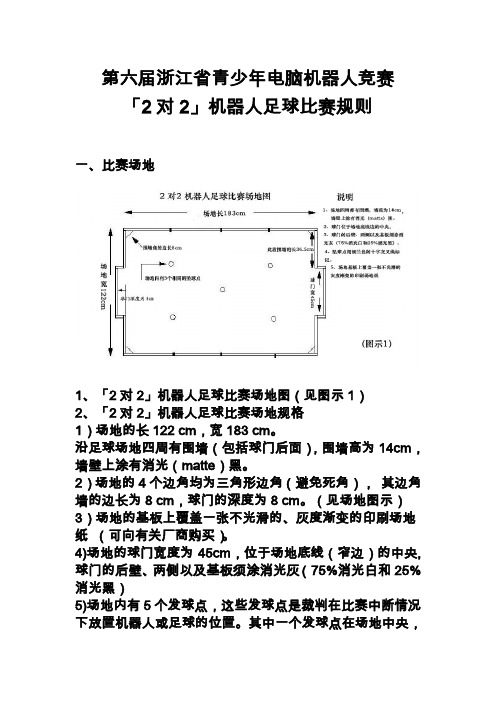
第六届浙江省青少年电脑机器人竞赛「2对2」机器人足球比赛规则一、比赛场地1、「2对2」机器人足球比赛场地图(见图示1)2、「2对2」机器人足球比赛场地规格1)场地的长122 cm,宽183 cm。
沿足球场地四周有围墙(包括球门后面),围墙高为14cm,墙壁上涂有消光(matte)黑。
2)场地的4个边角均为三角形边角(避免死角),其边角墙的边长为8 cm,球门的深度为8 cm。
(见场地图示)3)场地的基板上覆盖一张不光滑的、灰度渐变的印刷场地纸(可向有关厂商购买)。
4)场地的球门宽度为45cm,位于场地底线(窄边)的中央,球门的后壁、两侧以及基板须涂消光灰(75%消光白和25%消光黑)5)场地内有5个发球点,这些发球点是裁判在比赛中断情况下放置机器人或足球的位置。
其中一个发球点在场地中央,其余四个点位于四个拐角附近,2对2比赛场地中,从球门柱延伸出来的发球点距离场地中间位置大约为45cm处,这些发球点的标记为,兰色的十字交叉符号。
(中断如果出现在球门区,将球放在离球门最近的发球点上;如果出现在场地中部,则把球放在中央发球点上。
)6)无论比赛或练习,比赛场地都应水平摆放在工作台或地板上,建议各参赛队设计的机器人,应能够应对场地表面有3mm高的轻微起伏。
3、「2对2」机器人足球比赛环境要求为,低照度、冷光源,赛场应远离磁场。
提示:由于各个赛场环境的不同,建议各参赛队的机器人设计应能够适应各种照明和磁场状况。
二、机器人设计要求1、各参赛队使用的「2对2」足球比赛机器人的设计与构建,必须是经参赛队员启动后能够自动控制的足球机器人,禁止使用任何遥控方式操控。
机器人的构建、设计、制作与编程等工作主要应由参赛队员(学生)完成。
2、「2对2」足球比赛机器人的直径、高度不得超过22cm,重量高中、初中组不得超过2.5 kg,小学组不得超过1.5 kg。
3、「2对2」足球比赛机器人的控球区为,任何突出的部位连接在机器人身上而形成的内部空间,其设计要求是,球在控球区内的深度不得超过2 cm。
机器人“功夫”足球比赛规则

创意机器人“功夫”足球比赛规则一、参赛要求本文由【中文word文档库】搜集整理。
中文word文档库免费提供海量教学资料、行业资料、范文模板、应用文书、考试学习和社会经济等word文档1、赛事分为小学组、中学组;小学组面向在校小学生,中学组面向在校初、高中学生。
2、小学组每队限报3人,每队需有2个机器人参赛;允许购买成品或半成品,但必须自行改装。
3、中学组每队限报3人,每队需有2个机器人参赛;2个机器人中必须有一个机器人带有采用动力驱动的部件,在比赛过程中能实现某种动作(伸展或活动的范围不限)。
二、机器人1、机器人为轮式机器人且不限电机数量,机器人只能采用遥控方式来控制。
2、本次比赛对制作机器人的材料和形状不作限定,建议使用废旧或二手材料。
3、中学组带活动部件的机器人包含电池在内总重量不大于6公斤(电池标称电压不大于12V);除此之外其余参赛机器人包含电池在内总重量不大于4公斤(电池标称电压不大于12V);4、机器人不得带有喷洒液体、高压放电、电磁干扰等功能。
5、机器人整体固件部分(活动部件未伸展时)长度和宽度不得超过40cm。
6、机器人不能选用易燃能源。
7、机器人必须带有一个总电源开关。
8、同组机器人必须要有明确的统一外观(颜色、标志、图案、名称)。
9、每个机器人应配备两个以上的控制频率。
10、比赛前需按赛会要求提前申报频率,服从赛会的安排。
11、机器人占据球区域设计:占据球区域,即固定在机器人突出点上的两条直边所包含的内部空间。
(见图例)比赛进行时,球进入机器人的运球区的深度则不能超过4.5cm。
三、“功夫”足球赛简介足球比赛采取四个队伍同场对抗方式进行,每支队将制作两个机器人参赛,最后以进球多者为胜方。
四、比赛规则1、足球赛为比赛时间为5分钟。
2、比赛时,可在报名的队员内自行轮换操作机器人。
3、比赛用球为标准2号足球,直径约为14厘米。
4、比赛时间内,允许机器人在争球过程中互相碰撞或攻击,但不允许在无球情况下互相攻击。
2对2机器人足球比赛规则

2对2机器人足球比赛规则一、比赛场地1、「2对2」机器人足球比赛场地图(见图示1)2、「2对2」机器人足球比赛场地规格1)场地的长122 cm,宽183 cm。
沿足球场地四周有围墙(包括球门后面),围墙高为14cm,墙壁上涂有消光(matte)黑。
2)场地的4个边角均为三角形边角(避免死角),其边角墙的边长为8 cm。
(见场地图示)3)场地的基板上覆盖一张不光滑的、灰度渐变的印刷场地纸(可向有关厂商购买)。
4)场地的球门宽度为45cm,位于场地底线(窄边)的中央,球门的后壁、两侧以及基板须涂消光灰(75%消光白和25%消光黑)5)场地内有5个发球点,这些发球点是裁判在比赛中断情况下放置机器人或足球的位置。
其中一个发球点在场地中央,其余四个点位于四个拐角附近,2对2比赛场地中,从球门柱延伸出来的发球点距离场地中间位置大约为45cm处,这些发球点的标记为,兰色的十字交叉符号。
(中断如果出现在龙门区,将球放在离龙门最近的发球点上;如果出现在场地中部,则把球放在中央发球点上。
)6)无论比赛或练习,比赛场地都应水平摆放在工作台或地板上,建议各参赛队设计的机器人,应能够应对场地表面有3mm高的轻微起伏。
3、「2对2」机器人足球比赛环境要求为,低照度、冷光源,赛场应远离磁场。
提示:由于各个赛场环境的不同,建议各参赛队的机器人设计应能够适应各种照明和磁场状况。
二、机器人设计要求1、各参赛队使用的「2对2」足球比赛机器人的设计与构建,必须是经参赛队员启动后能够自动控制的足球机器人,禁止使用任何遥控方式操控。
机器人的构建、设计、制作与编程等工作主要应由参赛队员(学生)完成。
2、「2对2」足球比赛机器人的直径、高度不得超过22cm,重量高中、初中组不得超过2.5 kg,小学组不得超过1.5 kg。
3、「2对2」足球比赛机器人的控球区为,任何突出的部位连接在机器人身上而形成的内部空间,其设计要求是,球在控球区内的深度不得超过2 cm。
智能机器人足球比赛规则

智能机器人足球比赛规则一、比赛场地及设备标准1、场地:长240cm,宽160cm,高18cm。
2、墙壁:场地边界放置墙壁(包括球门区),由木板制成。
墙壁外侧为红、黄、绿相间的彩色,球场墙壁内侧为黑色,球门墙壁(三面)内侧为白色。
3、球门:球门位于场地底线的中间,宽60cm,深15cm,门前有一条宽0.8cm的红色球门线。
4、基板:球场铺有一张灰度由浅至深的黑白图纸,基板应尽量保持平整和水平。
5、球门区:从球门线两端向中场延伸20cm的矩形区域。
6、点球位:两个半场内距球门线中点垂直距离60cm处。
7、开球点:球场中央点。
8、坠球点:经过点球位,与中场线平行,形成2条线;再将球场纵向4等份,形成3条线。
这样,包括中场线在内的6条线所形成的9个交点即为坠球点(见上图)。
(在真实的场地中坠球点没有明显标志)9、照明:为室内体育馆灯光。
10、机器人:机器人体积(包括静止和比赛状态)必须在一个直径为30cm 圆的范围内,限高22cm,限重2.5kg。
机器人(形成三面包围球体的)踢球装置的深度最大为3cm。
11、足球:直径9cm,重160±5g。
是一个内部装有电池与小电珠的透明发光球(波长范围为810-700nm;光幅射密度为单个150Lm;光线直接、均匀地覆盖球面,且无盲点)。
二、名词解释1、出界球:足球(越过墙壁)被机器人踢出球场外。
2、进球:足球的中心(即球的1/2以上)越过球门线且非出界球,即为进球。
3、死球:足球被机器人和墙夹在中间无法移动、或足球被多个机器人包围卡住不动超过10秒钟时,则为死球。
4、丢球:机器人在第一次踢出球以后5秒内没有再接触到球。
5、比赛中断:裁判员吹哨宣布比赛开始或继续后,在20秒内没有任何机器人触到球,而且看上去没有机器人将会触到球,为比赛中断。
6、坠球:当发生死球或比赛中断时所采用的继续开始比赛的方式。
7、任意球:发生犯规判罚、出界球、点球未中时所采用的继续开始比赛的方式。
广茂达赛制机器人足球比赛_2v2-2009

广茂达赛制机器人足球比赛( 2 Vs 2 )一、比赛场地及设备标准1、场地:长240cm,宽160cm,高18cm。
2、墙壁:场地边界放置墙壁(包括球门区),由木板制成。
墙壁为绿色,球门内侧为灰色。
3、球门:球门位于场地底线的中间,球门宽60cm,深15cm,门前有一条宽0.8cm的红色球门线。
4、基板:球场铺有一张灰度由白至绿的渐变色图纸,基板应尽量保持平整和水平。
5、球门区:从球门线两端向中场延伸20cm的矩形区域。
6、点球位:两个半场内距球门线中点垂直距离60cm处。
7、开球点:球场中央点。
8、坠球点:将球场纵向4等份,形成3条线,与中场线的3个交点。
如图所示(在真实的场地中坠球点没有明显标志)。
9、照明:比赛场地照明为室内体育馆灯光,采用冷光源。
照明等级在比赛时才能确定。
参赛者在比赛期间有时间了解周围的灯光等级及标定机器人。
10、机器人:机器人(包括所有部件)必须在一个直径为30cm圆的范围内,限高22cm,限重2.0kg。
机器人踢球装置的深度最大为3cm。
机器人的传感器与所安装部件必须不影响其他的机器人正常比赛。
11、足球:直径9cm,重160±5g。
是一个内部装有电池与小电珠的透明发光球。
二、名词解释1、出界球:足球(越过墙壁)被机器人踢出球场外。
2、进球:足球的中心(即球的1/2以上)越过球门线且非出界球,即为进球。
3、死球:足球被机器人和墙夹在中间无法移动、或足球被多个机器人包围卡住不动超过5秒钟,以及裁判认为球已不可能自由运动了,则为死球。
4、丢球:机器人在第一次踢出球以后5秒内没有再接触到球。
5、比赛中断:裁判员吹哨宣布比赛开始或继续后,在30秒内没有任何机器人触到球,而且看上去没有机器人将会触到球,为比赛中断。
6、坠球:当发生比赛中断时所采用的继续开始比赛的方式。
7、任意球:发生犯规判罚、出界球、点球未中时所采用的继续开始比赛的方式。
三、比赛规则1、赛前准备:各参赛队应根据比赛时间安排,提前10分钟进入比赛区域,做赛前检查及准备调试。
人形机器人控球对抗赛规则

人形机器人控球对抗赛规则一、竞赛项目描述:人形机器人控球对抗赛是一项针对人形机器人的对抗赛事,要求学生全面的掌握并控制人形机器人完成规定竞赛任务,是对学生综合素质的一次展示。
二、竞赛任务双方参赛队员各控制本队两个机器人,分别为自控机器人和遥控机器人在规定场地内进行对抗竞赛,以在规定时间内最终有效得分作为本队成绩。
赛前,学生可以根据本队设计自由改装优化本队的参赛机器人但要与本规则的其它规定不相冲突。
三、竞赛(一)赛制及时间比赛分为小学、初中、高中组别。
比赛时间:上下半场各五分钟,中场休息五分钟。
(二)竞赛要求1、参赛队员由4名学生组成。
如有跨学段队伍以最高学段分组。
2、比赛期间,教练员不得入场指导和参与制作、展示和问辩。
3、竞赛器材及工具应符合安全标准,不得选用污染环境、有害健康的器材,大赛期间,不允许使用一切电动工具。
易发生危险的器材或工具在比赛现场由裁判员决定是否可用。
4、竞赛现场不允许携带手机、对讲机等通讯工具及可能会对机器人产生干扰的设备。
一经发现,将被取消比赛资格。
四、机器人标准:(1)机器人必须明显有两条腿、两只手臂、一个头及躯干部分;(2)机器人必须有不少于十二个自由度组成(伺服舵机或伺服电机);(3)双腿间及双足间均不能有任何连接;(4)机器人四肢必须是非轮式、履带式等机构,并且可以独立控制,不得联动;(5)机器人必须采用行走方式进行移动,不得采用滚动方式进行移动,更不得以故意摔倒方式进行移动;(6)所有参赛机器人不得拖缆控制;(7)机器人要具备一定的抗环境干扰能力;(8)机器人必须能够连走五步而不跌倒;(9)机器人行走的时候,两只脚需交替离地,不允许有除双足外的额外支点;(10)机器人必须能改变行走方向。
五、限制要求:(1)机器人不可损害选手、场地及对方机器人;(2)机器人不得携带激光、电磁脉冲、电磁铁等干扰对方选手或机器人的设备;(3)机器人不得向对方喷射液体、粉末或气体;(4)机器人在得分过程中只允许双足接触地面。
2010足球规则

附件二2010教育部机器人足球竞赛规则该规则同时适用2对2和1对1对抗赛,不同之处有注明。
小学组为1对1比赛,初中组和高中组为2对2比赛。
一、竞赛场地及设备标准1.场地(内侧):长240cm,宽160cm,高18cm。
2.墙壁:场地边界有墙壁(包括球门区)。
墙壁高为18cm,墙壁内侧为黑色(哑光),其中球门内侧为白色。
3.球门:球门位于场地底线的中间,宽60cm,深15cm。
4.基板:球场铺有一张绿色胶毯(压延垫卷材,材料:PVC,钻石纹),尽量保持平整和水平。
5.球门区:从球门线两端向中场延伸20cm的矩形区域。
6.点球位:两个半场内距球门线中点垂直距离60cm处。
7.开球点:球场中央点。
8.中场线:经过球场中央点,平行与球门线的贯穿球场的线。
9.坠球点:经过点球位,与中场线平行,形成2条线;再将球场纵向4等份,形成3条线。
这样,包括中场线在内的6条线所形成的9个交点即为坠球点(在竞赛场地中坠球点没有明显标志)。
10.照明:为室内照明灯光。
11.机器人:所有机器人的体积(包括静止和比赛状态),其正常置放的垂直投影面积必须是在直径22cm(含)范围之内,限高22cm (含)以下,限重1.6kg(含)以下。
机器人(形成三面包围球体的)踢球装置的控球深度最大为3cm。
以突出的两点之间成一水平连线中任一点且垂直到机器人边沿的直线距离计算。
12.足球:直径9cm,重160±5g。
是一个内部装有电池与小电珠的透明发光球(波长范围为810-700nm;光辐射密度为单个150Lm;光线直接、均匀地覆盖球面,且无盲点)。
二、名词定义解释1.出界球:足球(越过墙壁)被机器人踢出球场外。
2.进球:足球的中心(即球的1/2以上)越过球门线且非出界球,即为进球。
3.死球:足球被机器人和墙夹在中间无法移动、或被多个机器人包围卡住不动超过5秒钟时,则为死球。
4.比赛中断:比赛过程中,在20秒内没有任何机器人触到球,而且看上去没有机器人将会触到球,为比赛中断。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2对2机器人足球比赛规则一、比赛场地1、「2对2」机器人足球比赛场地图(见图示1)2、「2对2」机器人足球比赛场地规格1)场地的长122 cm,宽183 cm。
沿足球场地四周有围墙(包括球门后面),围墙高为14cm,墙壁上涂有消光(matte)黑。
2)场地的4个边角均为三角形边角(避免死角),其边角墙的边长为8 cm。
(见场地图示)3)场地的基板上覆盖一张不光滑的、灰度渐变的印刷场地纸(可向有关厂商购买)。
4)场地的球门宽度为45cm,位于场地底线(窄边)的中央,球门的后壁、两侧以及基板须涂消光灰(75%消光白和25%消光黑)5)场地内有5个发球点,这些发球点是裁判在比赛中断情况下放置机器人或足球的位置。
其中一个发球点在场地中央,其余四个点位于四个拐角附近,2对2比赛场地中,从球门柱延伸出来的发球点距离场地中间位置大约为45cm处,这些发球点的标记为,兰色的十字交叉符号。
(中断如果出现在龙门区,将球放在离龙门最近的发球点上;如果出现在场地中部,则把球放在中央发球点上。
)6)无论比赛或练习,比赛场地都应水平摆放在工作台或地板上,建议各参赛队设计的机器人,应能够应对场地表面有3mm高的轻微起伏。
3、「2对2」机器人足球比赛环境要求为,低照度、冷光源,赛场应远离磁场。
提示:由于各个赛场环境的不同,建议各参赛队的机器人设计应能够适应各种照明和磁场状况。
二、机器人设计要求1、各参赛队使用的「2对2」足球比赛机器人的设计与构建,必须是经参赛队员启动后能够自动控制的足球机器人,禁止使用任何遥控方式操控。
机器人的构建、设计、制作与编程等工作主要应由参赛队员(学生)完成。
2、「2对2」足球比赛机器人的直径、高度不得超过22cm,重量高中、初中组不得超过2.5 kg,小学组不得超过1.5 kg。
3、「2对2」足球比赛机器人的控球区为,任何突出的部位连接在机器人身上而形成的内部空间,其设计要求是,球在控球区内的深度不得超过2 cm。
(见图示2)4、无论参赛机器人的设计、加工与制作还是程序的编写都应由参赛的学生完成,本届竞赛禁止使用市售的现成套装足球机器人参赛,禁止任何遥控方式操控机器人的部件,机器人部件的固定可以使用胶水、螺丝钉等。
凡参赛的参赛机器人必须进行个性化装饰或标记,以便容易识别是同属一个参赛队的机器人。
机器人的机身颜色和光线发射器不得影响其它机器人的光感读数。
乐高光电传感器的发射管必须遮住,建议使用BLUE TAC。
三、具体规则:1、在2对2的机器人足球比赛中,每支参赛队的队员为2名参赛队员,只可以使用两个机器人进行比赛。
2、比赛战术运用中,如果使用守门员,守门员不得只做单向或左右移动的方式,它必须能朝各个方向移动,特别是前冲方式移动,守门员应具备向前拦截,而且是到超越离球门45 cm处发球点位置去拦截球的能力。
守门员如果对踢过来的球没有任何反应,将被视为“损坏的机器人”。
3、比赛时,负责进攻的机器人不得损坏场地上的足球,如果发生机器人损坏了足球,此机器人便要暂停出赛,并当作「损坏的机器人」处理。
参赛队员在裁判允许的情况下,可以对该机器人及时做出相应调整以防止再出现同样情况。
如果该机器人再次损坏足球,将会被取消比赛资格。
4、“2对2”的机器人足球比赛将采用能均匀发射红外光的电子“足球”。
本届竞赛将使用以下几种“足球”为比赛用球即:Wiltronics 研究中心制造的MK2红外球、日本EK公司制造的ROBOSoccer红外球(email:**************.jp)和本国产的红外光的电子“足球”。
比赛时各参赛队自备“足球”。
5、在举行正式比赛前,各参赛队的参赛机器人应接受评委对的资格审查。
资格审查程序与内容:1)各参赛队员把参赛机器人任何突出的部分充分展开;2)裁判对机器人的重量、体积进行逐个测量(如果机器人有一个可动部分能做两个方向的伸展,该机器人必须在运做状态下接受检查)3)不合格的机器人进行限时调整调整时间不得超过20分钟,修改后的机器人经过再次检查后仍不合格将取消比赛资格。
4)参赛队员要向裁判员提供机器人设计、制作过程图像资料、材料清单和完整的程序并接受裁判员的赛前问辩。
问辩内容:对部分程序的讲解;机器人研制过程、材料的选用及设计上的改进等。
按裁判员要求将机器人竖直摆放到指定停泊处5)比赛期间机器人若有修改,参赛队伍必须让其再次接受检查。
6、比赛方式比赛分小组循环赛和决赛。
小组循环赛,胜一场积分3分,平一场积分1分,负一场积分为0分。
小组排名第一的参赛队进入决赛。
决赛为单轮淘汰制,胜者进入下一轮。
7、参赛队在正式比赛前半小时进入竞赛区报到,接受机器人资格审查、和问辩。
8、每场“2对2”的机器人足球比赛时间为10分钟,比赛前给参赛队2分钟的调整时间。
整场比赛分上下半场进行比赛,每半场比赛的时间为5分钟,两个半场比赛将持续计时中间不会停止(“被破坏的机器人除外”)。
9、参赛队伍迟到时,裁判员将可执行判罚,每迟到一分钟给该队处罚一个进球。
参赛队于比赛开始后3分钟仍未到场,将丧失比赛权,裁判员可判另一球队以3:0的分数胜出。
10、关于挑边或开球的选择上半场开始时,将由裁判员抛硬币,一方可选择挑边或开球。
另一方接受剩余选择。
上半场没有获得开球权的队将在下半场开球。
11、“2对2”的机器人足球比赛每上下半场比赛均以开球形式作为比赛的开始。
开球时,所有的机器人必须位于自己的半场,此时,所有机器人必须停止。
球由裁判放置在场地的中央,所有不开球的机器人离球必须大于30cm,并且不能置于球门线上,也不能停在球门线后面。
开球的一方把机器人放到球的附近。
比赛双方一旦放好机器人,就不得再移动。
此时,裁判可以调整机器人的摆放位置。
在裁判员鸣哨后,所有的机器人立刻由参赛队员启动。
如果在裁判哨声响起前,抢先启动的机器人将被裁判员从场地上拿走以损伤的机器人对待。
“2对2”的机器人足球比赛的开球为两脚球,开球的一方,不得一脚将球直接踢入对方球门内。
12、参加足球比赛的队员在通常情况下,不允许任意移动机器人。
每场比赛前,参赛队应指派一名队员担当队长(操作手),在规则允许范围内或在裁判员的指示下负责启动、拿走、移动、重新放置机器人。
其它参赛队员在场地附近的座位上就座,只有在获准后,才可以进入场地按裁判员的要求执行规定任务。
13、关于球的运动1)比赛进行时,机器人不得「持球」持球的意思是,通过堵死足球去路从而实现的完全控球。
比如说,把球固定在机器人身上;机器人用身体圈住球来阻止其它机器人触球;或使用机器人身体的任何部分将球包围或设法圈住球。
机器人移动时球停止滚动,或是球滚动撞到机器人身体时没有回弹,这就说明球是被圈住的。
但唯一例外的是旋转盘的使用,它可以给球提供向后旋转的动力,以保证球在转盘的表面上,这也称为“运球”。
机器人“运球”时,球深入运球装置内的深度不得超过2 cm。
(2cm是运球装置与球接触点开始算起)2)球不能压在机器人下面,比赛进行的任何时候都必须看得见足球,其它机器人必须能接触到球。
14、进球与记分1)进球的定义:整个足球完全越过球门线即为进球。
(此时相当于球碰到龙门后壁)2)进球的判断:A、球必须自由滚入球门才算进球,否则将被视为「挤入」,从而进球无效。
当发生挤球入门情况时,裁判吹哨停止比赛并做出解释。
进球被宣布无效时,裁判员将球放置到最近的发球点后比赛恢复进行。
B、机器人必须要有明显地去踢球或释放球的动作,否则视为「推球」。
如果没有释放球的动作,球被机器人控制而朝着球门方向走动时,就算球获得短暂自由而滚入球门的,仍被视为推入的进球,从而进球无效。
该规则的唯一例外是,机器人在球门前小于15cm处首次触球或者与另一机器人产生碰撞后将球推入球门的则进球有效3)进球时,裁判将鸣哨示意,进球方将得到一分。
进球后,失球方将重新开球。
4)如果向球门方向运动的球碰到了在球门线上或球门区内的防守机器人,对方将获得一个罚球机会。
5)“乌龙球”将视为对方的进球,即使球是被“挤入”球门的也一样被判为进球。
15、“比赛中断”,比赛进行时,如果出现球被夹住、机器人损伤、多人防守、机器人犯规等各种情况,可能会引起比赛中断,此时裁判员可以叫停,把球移到坠球点,比赛继续进行。
一般比赛可以根据裁判的哨声停止,但比赛时钟不停止,所有的情况由裁判判断决定。
哨响时,所有的机器人必须立刻停止且回到指定位置。
比赛中断后,由裁判鸣哨恢复比赛,所有机器人同时启动。
1)裁判在以下几种情况下可以鸣哨示意「过程中断」A、当球被多个机器人夹住,或者卡死在机器人和墙壁之间,裁判视其为无法自由运动时,即可判作「过程中断」。
B、当发生「挤球」现象时,裁判应该马上鸣哨示意「过程中断」。
C、比赛进行时,如果在20秒内没有任何机器人触到球,并且看上去没有机器人将会触球时,即可视为「过程中断」。
D、其它意外情况发生时。
2)「过程中断」的处理A、「过程中断」发生后,裁判员可将球移到最近的空发球点处。
B、裁判可将对被卡死的机器人进行尽可能微小的移动,让其恢复自由。
守门员维持原来的位置。
C、当「过程中断」发生时,所有在球门线后面的机器人必须前移离开进球区16、「损坏的机器人」的判断与处理1)「损坏的机器人」的判断A、如果机器人在20秒内没有移动,对球没有反应,将被裁判视为损坏的机器人。
B、如果1个机器人卡死在墙壁上,是因为它没有传感器对墙壁做出相应的反应,就不作为损伤机器人。
C、如果机器人连续回到球门区域内,将被裁判视为损坏的机器人。
2)「损坏的机器人」情况出现的处理A、裁判员或参赛队员可以将机器人从场地上拿走。
B、损坏的机器人必须在一分钟后拿回到比赛场地。
C、裁判同意后,损坏的机器人可以返回其离场位置附近的罚球点,但是该点不应对其有利。
D、守门员可以返回到球门前的区域。
E、损坏的机器人离场、修复和更换期间,比赛可继续进行,但是如果因为与对方机器人发生碰撞造成损坏的,裁判可以选择中断比赛。
F、如果机器人自己翻身倒地,将被视为损坏的机器人并移离赛场;如因与另一个机器人碰撞导致翻身倒地,由裁判扶正并继续比赛。
17、“2对2”的机器人足球比赛的“多人防守”1)多人防守的定义:如果防守方多于一个机器人进入靠近球门的区域且严重影响比赛,就出现多人防守。
2)“多人防守”情况出现的处理。
多人防守情况发生时,对比赛影响最小的机器人将被移到最近的发球点,如果该机器人为守门员,则移走另一个机器人。
18、关于犯规1)机器人如果利用某种装置或某个动作连续攻击或冲撞另一个并不控球的机器人,裁判将判其犯规。
犯规的机器人将被判罚离开场地一分钟,犯规方(队长)将犯规的机器人拿走并对其进行调整,比赛将继续进行。
如果该机器人连续犯规2次,将得到一张红牌,并取消本场比赛资格。