机器人软极限相关参数
工业机器人的基本参数和性能指标

工业机器人的基本参数和性能指标表示机器人特性的基本参数和性能指标主要有工作空间、自由度、有效负载、运动精度、运动特性、动态特性等。
(1)工作空间(Work space)工作空间是指机器人臂杆的特定部位在一定条件下所能到达空间的位置集合。
工作空间的性状和大小反映了机器人工作能力的大小。
理解机器人的工作空间时,要注意以下几点:1)通常工业机器人说明书中表示的工作空间指的是手腕上机械接口坐标系的原点在空间能达到的范围,也即手腕端部法兰的中心点在空间所能到达的范围,而不是末端执行器端点所能达到的范围。
因此,在设计和选用时,要注意安装末端执行器后,机器人实际所能达到的工作空间。
2)机器人说明书上提供的工作空间往往要小于运动学意义上的最大空间。
这是因为在可达空间中,手臂位姿不同时有效负载、允许达到的最大速度和最大加速度都不一样,在臂杆最大位置允许的极限值通常要比其他位置的小些。
此外,在机器人的最大可达空间边界上可能存在自由度退化的问题,此时的位姿称为奇异位形,而且在奇异位形周围相当大的范围内都会出现自由度进化现象,这部分工作空间在机器人工作时都不能被利用。
3)除了在工作守闻边缘,实际应用中的工业机器人还可能由于受到机械结构的限制,在工作空间的内部也存在着臂端不能达到的区域,这就是常说的空洞或空腔。
空腔是指在工作空间内臂端不能达到的完全封闭空间。
而空洞是指在沿转轴周围全长上臂端都不能达到的空间。
(2)运动自由度是指机器人操作机在空间运动所需的变量数,用以表示机器人动作灵活程度的参数,一般是以沿轴线移动和绕轴线转动的独立运动的数目来表示。
自由物体在空间自六个自由度(三个转动自由度和三个移动自由度)。
工业机器人往往是个开式连杆系,每个关节运动副只有一个自由度,因此通常机器人的自由度数目就等于其关节数。
机器人的自由度数目越多,功能就越强。
日前工业机器人通常具有4—6个自由度。
当机器人的关节数(自由度)增加到对末端执行器的定向和定位不再起作用时,便出现了冗余自由度。
YAMAHA 机器人和PLC通讯指令
第6章和个人计算机的通信ERCX/SRCX控制器除了使用TPB外,也可藉由RS-232C的通信使用个人计算机编辑程序、点数据、及执行机器人的运转。
在本章将介绍个人计算机和ERCX/SRCX之间执行通信时,必要的参数的设定及通信语言。
6-1通信参数规格个人计算机侧的通信参数请设定如下述所示。
设定方法请参照各机器的操作说明书,或更改PRM47参数。
■传送速度9600bps■数据位(data bit)长8bit■停止位(stop bit)长1bit■同位(parity)检查有■同位指定奇数同位(ODD)■控制方式X ON/X OFF软件控制方式(X参数)(有效)■通信方式全二重■同步方式调步同步方式■复位(return)键发送处理CR码■CR码(Code)接收处理CR.LF接收时复位+换行CR接收时复位【PRM47参数的内容】bit功能选择15~9预约设为08结束码0:CR+LF1:CR7~4传输速率0:9600bps1:300bps2:600bps3:1200bps4:2400bps5:4800bps6:9600bps7~15:不可设定3数据位长0:8bit1:7bit2停止位长0:1bit1:2bit1~0同位检查0:奇数1:偶数2~3:无6-2通信电缆规格注意:控制器侧连接器的第10、12、18、2l pin为和TPB连接专用,为了防止事故,请勿配线。
当个人计算机侧的机器采用独自的配线规格时,务必确认使用机器的规格后再行配线。
6-2-1对方侧为D-sub25pin的连接器时连接器型式适合连接器型号:XM2A-2501(OMRON制)或其同类产品适合连接器外盖型号:XM2S-2511(OMRON制)或其同类产品6-2-2对方侧为D-sub9Pin的连接器时控制器侧连接器型式适合连接器型号:XM2A-2501(OMRON制)或其同类产品适合连接器外盖型号:XM2S-2511(OMRON制)或其同类产品对方侧连接器型式适合连接器型号:XM2D-0901(OMRON制)或其同类产品适合连接器外盖型号:XM2S-0913(OMRON制)或其同类产品SHELL指的是连接器的金属外壳部份。
工业机器人的基本参数和性能指标知识讲解

工业机器人的基本参数和性能指标工业机器人的基本参数和性能指标表示机器人特性的基本参数和性能指标主要有工作空间、自由度、有效负载、运动精度、运动特性、动态特性等。
(1)工作空间(Work space)工作空间是指机器人臂杆的特定部位在一定条件下所能到达空间的位置集合。
工作空间的性状和大小反映了机器人工作能力的大小。
理解机器人的工作空间时,要注意以下几点:1)通常工业机器人说明书中表示的工作空间指的是手腕上机械接口坐标系的原点在空间能达到的范围,也即手腕端部法兰的中心点在空间所能到达的范围,而不是末端执行器端点所能达到的范围。
因此,在设计和选用时,要注意安装末端执行器后,机器人实际所能达到的工作空间。
2)机器人说明书上提供的工作空间往往要小于运动学意义上的最大空间。
这是因为在可达空间中,手臂位姿不同时有效负载、允许达到的最大速度和最大加速度都不一样,在臂杆最大位置允许的极限值通常要比其他位置的小些。
此外,在机器人的最大可达空间边界上可能存在自由度退化的问题,此时的位姿称为奇异位形,而且在奇异位形周围相当大的范围内都会出现自由度进化现象,这部分工作空间在机器人工作时都不能被利用。
3)除了在工作守闻边缘,实际应用中的工业机器人还可能由于受到机械结构的限制,在工作空间的内部也存在着臂端不能达到的区域,这就是常说的空洞或空腔。
空腔是指在工作空间内臂端不能达到的完全封闭空间。
而空洞是指在沿转轴周围全长上臂端都不能达到的空间。
(2)运动自由度是指机器人操作机在空间运动所需的变量数,用以表示机器人动作灵活程度的参数,一般是以沿轴线移动和绕轴线转动的独立运动的数目来表示。
自由物体在空间自六个自由度(三个转动自由度和三个移动自由度)。
工业机器人往往是个开式连杆系,每个关节运动副只有一个自由度,因此通常机器人的自由度数目就等于其关节数。
机器人的自由度数目越多,功能就越强。
日前工业机器人通常具有4—6个自由度。
当机器人的关节数(自由度)增加到对末端执行器的定向和定位不再起作用时,便出现了冗余自由度。
工业机器人的技术参数课件

分辨率
? 分辨率指能够由执行器完成的 最小增量距离 。 ? 分辨率不仅与关节位置编码器的分辨率,或
伺服电动机和传动装置的步长有关,还受系 统摩擦、扭曲、齿隙游移和运动的配置的影 响。
? 多节点串联连接机械臂的有效分辨率不如其 单个关节的分辨率。
? 不仅决定于负载的质量, 还必须将 末端执行器的质量和惯性力 列入考 虑范围。
? 承载能力这一技术指标是指 高速运行时 的承载能力。
刚度(Stiffness)
? 刚度指机身或臂部在外力作用下 抵抗弹性 变形的能力 。
? 刚度 = 外力:变形量(位移) ? 零件的刚度(或称刚性)常用单位变形所
需的力或力矩 来表示,刚度的大小取决于 零件的几何形状 和材料种类(即材料的弹 性模量)。
? 利用冗余的自由度可以增加机器人的灵活性, 躲避障碍物和改善动力性能。
ABB1410机器人
自由度(Degree of freedom)
? 它是衡量机器人适应性和灵活性的重要指标。 自由度越高, 机器 人的灵活性也是相应的增加 ,功能也是会相应增加,但是自由度 越高,控制越复杂, 而且随着关节的增加,调试的复杂程度也会 相应增加,系统潜在的机械共振点也不成比例的增加。333 Nhomakorabea2
2
2
2
C
C
1
1
1
1
要定位 的球体
要定位 的球体
3
4
45
5
要定位的 要定位的 旋转钻头 旋转钻头
(a)
(a)
(b) (b)
自由度(Degree of freedom)
? 工业机器人的自由度是根据其用途而设计的, 可能小于6个自由度,也可能大于 6个自由度。
机器人性能指标
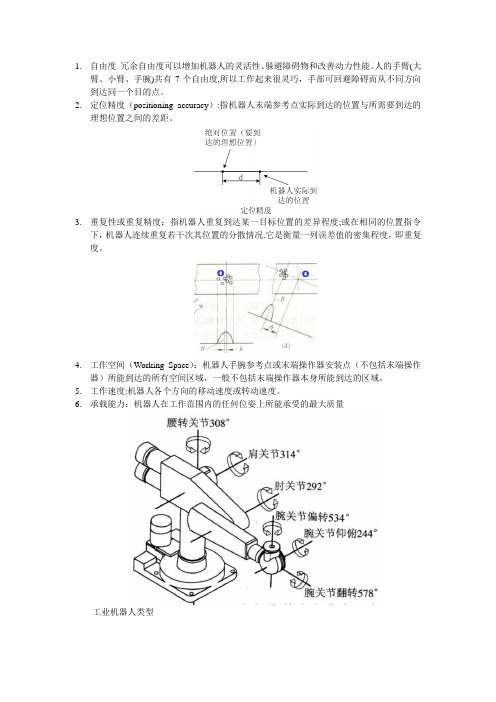
1.自由度冗余自由度可以增加机器人的灵活性、躲避障碍物和改善动力性能。
人的手臂(大臂、小臂、手腕)共有7个自由度,所以工作起来很灵巧,手部可回避障碍而从不同方向到达同一个目的点。
2.定位精度(positioning accuracy):指机器人末端参考点实际到达的位置与所需要到达的理想位置之间的差距。
3.重复性或重复精度:指机器人重复到达某一目标位置的差异程度;或在相同的位置指令下,机器人连续重复若干次其位置的分散情况.它是衡量一列误差值的密集程度,即重复度。
4.工作空间(Working Space):机器人手腕参考点或末端操作器安装点(不包括末端操作器)所能到达的所有空间区域,一般不包括末端操作器本身所能到达的区域。
5.工作速度:机器人各个方向的移动速度或转动速度。
6.承载能力:机器人在工作范围内的任何位姿上所能承受的最大质量工业机器人类型首先要知道的是你的机器人要用于何处。
这是你选择需要购买的机器人种类时的首要条件。
如果你只是要一个紧凑的拾取和放置机器人,Scara机器人是不错的选择。
如果想快速放置小型物品,Delta机器人是最好的选择。
如果你想机器人在工人旁边一起工作,你就应该选择协作机器人.下面是一些具体的指标.机器人负载负载是指机器人在工作时能够承受的最大载重。
如果你需要将零件从一台机器处搬至另外一处,你就需要将零件的重量和机器人抓手的重量计算在负载内.自由度(轴数)机器人轴的数量决定了其自由度。
如果只是进行一些简单的应用,例如在传送带之间拾取放置零件,那么4轴的机器人就足够了。
如果机器人需要在一个狭小的空间内工作,而且机械臂需要扭曲反转,6轴或者7轴的机器人是最好的选择。
轴的数量选择通常取决于具体的应用。
需要注意的是,轴数多一点并不只为灵活性。
事实上,如果你在想把机器人还用于其它的应用,你可能需要更多的轴,“轴”到用时方恨少。
不过轴多的也有缺点,如果一个6轴的机器人你只需要其中的4轴,你还是得为剩下的那2个轴编程。
机器人灵敏度分析及其参数实现
机器人灵敏度分析及其参数实现机器人技术在近年来得到了快速发展。
随着机器人的应用场景越来越广泛,其灵敏度成为了一个越来越重要的问题。
机器人灵敏度是机器人在处理物理变化和环境改变时的反应能力,它直接影响到机器人的定位和控制精度。
一、机器人灵敏度的意义机器人的灵敏度是衡量其反应能力的一个指标,在机器人的设计和应用过程中具有重要的意义。
灵敏度越高,机器人在操作时能够更快地作出反应,处理物理变化和环境改变的能力也更加强大。
例如,在一些需要精准定位的操作场景中,机器人的灵敏度起到关键作用。
如果机器人的灵敏度不够高,在操作过程中就会存在误差,导致操作失败。
因此,机器人灵敏度的提高具有重要的意义,可以保证机器人的操作精度,提高机器人的工作效率。
二、机器人灵敏度的影响因素机器人灵敏度的影响因素很多,包括机器人的结构设计、传感器的选择和精度等。
其中,最重要的因素是机器人的传感器,传感器的质量和精度直接影响着机器人的灵敏度。
传感器的选择通常会受到以下几个因素的影响:1、应用场景的不同。
根据不同的应用场景,需要选择不同类型和精度的传感器。
例如,在机器人的精准定位场景中,需要选择高精度、高分辨率的传感器。
2、成本因素。
传感器的成本通常会随着其精度的提高而增加,因此在选择传感器时,还需要考虑成本的因素。
3、传感器的重量。
传感器的重量会影响机器人的运动性能,因此需要在传感器的性能和重量之间进行权衡。
在选择传感器之后,还需要对传感器进行参数的配置和优化,以实现最佳的灵敏度效果。
三、如何实现机器人灵敏度优化机器人灵敏度的实现需要对机器人进行全面的参数优化。
参数优化包括以下几个步骤:1、传感器参数的优化。
传感器的参数优化包括选择合适的传感器精度、扫描频率等参数,以实现最佳的反应能力。
2、运动参数的优化。
运动参数的优化包括机器人的速度、加速度、减速度等参数的调整,以保证机器人在运动过程中具有更好的响应能力。
3、控制参数的优化。
控制参数的优化包括机器人的控制算法、PID参数等的调节,以保证机器人具有更快的反应速度和更好的稳定性。
ABB机器人系统参数

ABB机器人系统参数ABB机器人系统是一种用于工业自动化的先进技术。
ABB机器人系统包括机器人本身、控制系统、传感器和其他附件。
机器人系统参数主要包括尺寸、负载能力、速度、精度和安全性等方面。
下面将详细介绍ABB机器人系统的参数。
首先是尺寸参数。
ABB机器人系统的尺寸主要考虑到机器人在工作空间内的占用空间。
通常包括机器人的高度、宽度、长度和重量等。
这些参数决定了机器人在工作环境中占据的空间大小,从而影响工作场所的布局和机器人系统的设计。
其次是负载能力参数。
负载能力是指机器人能够承受的最大重量。
ABB机器人系统根据应用需求提供不同负载能力的机器人,从几公斤到数十公斤不等。
负载能力参数对于机器人的应用范围和功能起到决定性的作用。
根据不同的负载能力,机器人可以用于不同的工作场景,如组装、搬运、焊接、喷涂等。
第三是速度参数。
速度是指机器人在工作过程中移动的速度。
ABB机器人系统具有高速度、高精度的特点,可以提高工作效率和生产效益。
机器人的速度参数包括最大加速度、最大速度和关节速度等。
机器人的速度参数直接影响工作速度和产品生产效率。
第四是精度参数。
精度是指机器人在工作过程中的定位精度和重复性。
ABB机器人系统具有很高的运动精度和位置重复性,可以实现高精度的工作操作。
精度参数包括机器人的位置精度、姿态精度、重复性和偏差等。
机器人精度参数直接影响产品的质量和可靠性。
最后是安全性参数。
安全性是指机器人在工作过程中对操作员和周围环境的安全性能。
ABB机器人系统通过设计安全控制系统、传感器和防撞装置等来保证工作过程中的安全性。
安全性参数包括机器人的紧急停止功能、碰撞检测和回避功能、机器人臂和末端工具的碰撞力控制等。
机器人的安全性参数对于保护操作员和设备的安全至关重要。
综上所述,ABB机器人系统的参数包括尺寸、负载能力、速度、精度和安全性等方面。
这些参数决定了机器人的应用范围和性能特点,对于工业自动化具有重要意义。
不断提高机器人系统的参数,将进一步推动工业自动化技术的发展和应用。
3 工业机器人主要技术参数

1.2.2工业机器人技术参数工业机器人制造商在产品供货时一般会提供相应的技术数据.如表1-1为FANUC工业机器人机器人M-10iA/12的主要技术参数。
M-10iA主要技术参数M-10iA运动范围M-10iA机器人本体配置Item / 名称Specification / 配置1 Wrist flange (ISO) / 法兰盘(ISO) Standard Type / 标准型2 Transportation tool / 搬运工具Eyebolt/ 运输吊环3 Mechanical mastering mark / 零位标签Scribe mark / 机械划线零位表示4 Axis limitation / 轴限位J1轴5 Robot connection cable / 机器人连接电缆Non-Flex 7m /非柔性电缆7米6 Robot mechanical cable (Base to J3)机器人机体内电缆(底座到J3轴)Air×2/ 气管(2根)EE / EE信号线8进8出R-30iB_Contorller Mate型控制箱体(M-10iA)※ 主控制轴卡支持最多24根轴,且可通过辅助轴卡支持最多36根轴※ 可快速更换的放大器(小于5分钟)※ 彩色,具网络浏览功能,易于编程且可自定义用户界面的iPendant※ 多样的I/O 连接方式针对各种应用的丰富的软件功能包R-30iB 控制器配置 尽管各厂商所提供的技术参数项目是不完全一样的,工业机器人的结构、用途以及用户的要求也不同,但是,工业机器人的主要参数一般都应有:自由度、工作精度、工作范围、最大工作速度、承载能力等。
1)自由度自由度是指机器人所具有的独立坐标轴运动的数目,不包括末端执行器(手爪)的开合自由度。
如.表1-2所示的单自由度关节通常实现平移、回转或旋转运动。
在完成某一特定作业时具有多余自由度的机器人就叫做冗余自由度机器人。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 弧焊用途相关参数 • FD006 参数为独立运动控制功能(4系列或者8系列)参 数值设定为1时为4系列,参数值设定为2时为8系;FD007 参数为独立运动控制协调轴组控制(为1时正常【协调键 4】,为2时协调命令转换用[转换+4键]), • PSTART JOB:R1JOB SUB1 • PSTART JOB:R2JOB SUB2 • . • . • PSTART JOB:R7JOB SUB7 • PWAIT SUB1 • PWAIT SUB2 • . • . • PWAIT SUB7 机器人程序类型R1JOB只能为不带外部轴的轴组.
机器人机器部参数(续)
• 【AMCxG参数】为配置系统机器人的动作控制参数(x可 以是数字1或2或3或4等); • 【MFxG参数】为定义机器人运动功能参数(x可以是数字1 或2或3或4等); • 【SVD参数】为定义机器人 • 【SVSxB参数】为配置系统机器人的伺服包参数(x可以是 数字1或2或3或4等);
机器人参数应用详解
• FD018参数为机器人R1/2要带外部轴的轴组同步协调机能, 参数值0为无效,1为有效. 机器人程序R1S1的控制轴组形 式为R1+S1:S1,机器人程序R2S1的控制轴组形式为R2+ S1:S1. • PSTART JOB:R1S1 SUB1 SYNC SUB2 • PSTART JOB:R2S1 SUB2 • PWAIT SUB1 • PWAIT SUB2 • FD022参数为机器人R1/2要带外部轴的轴组同步协调机能 是否完全同步 , 参数值 0 为不完全同步, 1 为完全同步。当 设置成完全同步时,有时会对焊接成型不好(根据焊接工 艺是否要完全同步,完全同步与不完全同步相比,完全同 步增加机器人的运行节拍)。 • 在运行程序时,如果程序不运行,得先把多程序操作模式 设置成有效【转换+4】来回切换多程序操作模式或者单一 程序操作模式. S4C152 参数为用户设定通用输出号码 (1~1024,其中0为不使用)。当在示教模式时,设定多 程序操作模式有效后,设定的通用输出为ON。
• • • • • • • • • • • • • • • • • • • • • • • • • •
///GROUP1 RB1 ///GROUP2 ST1 NOP MOVJ C00000 VJ=40.00 +MOVJ EC00000 MOVJ C00001 VJ=40.00 +MOVJ EC00001 TSYNC 1 MOVJ C00002 VJ=40.00 +MOVJ EC00002 MOVL C00003 V=333.3 +MOVJ EC00003 TSYNC 2 ARCON AC=200 AV=23.0 RETRY REPLAY ARCCTS AC=205 AV=24.0 DIS=3.0 MOVL C00004 V=10.0 +MOVJ EC00004 MOVL C00005 V=10.0 +MOVJ EC00005 MOVL C00006 V=10.0 +MOVJ EC00006 ARCOF AC=190 AV=21.0 T=0.30 MOVJ C00007 VJ=30.00 +MOVJ EC00007 VJ=30.00 MOVL C00008 V=166.7 +MOVJ EC00008 VJ=30.00 ARCON AC=200 AV=22.5 TIMER T=0.30 ARCOF MOVJ C00009 VJ=40.00 +MOVJ EC00009 TSYNC 3 MOVJ C00010 VJ=40.00 +MOVJ EC00010 TSYNC 4 MOVJ C00011 VJ=40.00 +MOVJ EC00011 MOVC C00012 V=333.3 +MOVJ EC00012
机器人机器部参数
• 【机器部参数】有: • 【SVCxB参数】作用为定义机器人【整流器】 参数(x可以是数字1或2或3或4等); • 【RCxG参数】其为定义系统【机器人机种类型】 参数 (x可以是数字1或2或3或4等) • 【ROxG参数】其为定义系统【机器人坐标原点】 参数 (x可以是数字1或2或3或4等); • 【SVxG参数】其为配置系统机器人的伺服参数 (x可以是数字1或2或3或4等); • 【SVMxG参数】为配置系统机器人的【伺服电 机】参数(x可以是数字1或2或3或4等); • 【SVPxG参数】为配置系统机器人的伺服功率模 块参数(x可以是数字1或2或3或4等); • 【S1CxG参数】为配置系统机器人的匹配参数(x 可以是数字1或2或3或4等);
Nx100机器人控制系统
参数的讲座
首钢莫托遇机器人有限公司 技术中心
1.机器人参数的分配
• 机器人参数主分成两大部分:【机器人共通部分】和【机器部参 数】. • 【机器人共通部分】有: • 【FD参数】 其主要作用为定义机器人机能用途参数; • 【SxD参数】其主要作用为定义系统参数 (x可以是数字1或2或 3或4); • 【S2C参数】其主要作用为配置系统参数(机器人相关操作) ; • 【S3C参数】其主要作用为配置系统参数(机器人干涉区相关参 数) ; • 【 S4C参数 】其主要作用为配置系统参数(机器人输入输出 部) ; • 【RS参数】其主要作用为系统传输用途参数 ; • 【CIO参数】其主要作用为配置机器人输入输出 ; • 【RCD参数】其主要作用为机器人匹配定义参数; • 【AxP参数】为机器人应用用途参数(x可以是数字1或2或3或4); • 【SxE参数】为机器人应用用途参数(x可以是数字1或2或3或4)
• • • • • • • • • • • • • • • //GROUP1 RB2 ///GROUP2 ST1 NOP MOVJ C00000 VJ=40.00 +MOVJ EC00000 MOVJ C00001 VJ=40.00 +MOVJ EC00001 TSYNC 1 MOVJ C00002 VJ=40.00 +MOVJ EC00002 MOVL C00003 V=333.3 +MOVJ EC00003 TSYNC 2 ARCON AC=200 AV=23.0 RETRY REPLAY ARCCTS AC=205 AV=24.0 DIS=3.0 MOVL C00004 V=10.0 +MOVJ EC00004 MOVL C00005 V=10.0 +MOVJ EC00005 MOVL C00006 V=10.0 +MOVJ EC00006 ARCOF AC=190 AV=21.0 T=0.30 MOVJ C00007 VJ=30.00 +MOVJ EC00007 VJ=30.00 MOVL C00008 V=166.7 +MOVJ EC00008 VJ=30.00 ARCON AC=200 AV=22.5 TIMER T=0.30 ARCOF MOVJ C00009 VJ=40.00 +MOVJ EC00009 TSYNC 3 MOVJ C00010 VJ=40.00 +MOVJ EC00010 TSYNC 4 MOVJ C00011 VJ=40.00 +MOVJ EC00011 MOVC C00012 V=333.3 +MOVJ EC00012 TSYNC 5