永磁同步电机的算法实现与调试
永磁同步电机的控制策略与调试方法研究
永磁同步电机的控制策略与调试方法研究永磁同步电机(PMSM)是一种高效率、高效能的电机,这种电机的功率因数很高,能够快速响应控制电压的变化。
它采用了永磁体作为转子,因此在电机的设计和控制过程中有一些独特的需求和挑战。
本文探讨了永磁同步电机的控制策略和调试方法,包括传统的基于反电动势(BEMF)的控制方法以及高级的无传感器控制方法。
此外,我们还对PMSM的参数识别和调试进行了讨论。
最后,我们给出了一些实用的调试技巧,这些技巧将有助于实现最佳的PMSM性能。
基于反电动势控制传统的永磁同步电机控制方法是基于反电动势控制(BEMF)。
BEMF是指在电机中转子转动时所产生的电磁力,这种电磁力会使电机上有一种反制电压。
这种反制电压的频率和极数(磁极数)成正比。
因此,通过测量BEMF的频率和极数,我们可以知道电机的转速。
BEMF控制方法能够控制电机的速度和位置。
速度控制是通过改变电机的输入电压来实现的,而位置控制是通过对电机控制器的输出进行编码来实现的。
这种控制方法可以实现高精度的控制,但缺点是需要一个额外的传感器来测量BEMF,这会导致成本和复杂性的增加。
无传感器控制无传感器控制是近年来发展起来的一种新形式的永磁同步电机控制方法。
这种方法不需要传感器来测量BEMF,而是利用电机的特定特征来确定它的转速和位置。
这些特征包括电机的电感,电阻,电容以及电机和控制器之间的其他参数。
无传感器控制方法可以显著降低电机的成本,但它要求对电机的参数有更准确的识别能力。
参数识别和调试为了实现更准确的电机控制,需要对电机的参数进行识别和调试。
这些参数包括电机的电感,电阻,电容以及电机和控制器之间的其他参数。
参数识别可以通过测量电机响应的方式来实现,如测量电机对输入电压和负载的响应。
在这个过程中,需要注意测量的准确性和精度,因为这些参数的准确性会直接影响控制的性能和精度。
调试是指通过对电机控制器的输出进行编码来实现位置控制。
这个过程需要通过电机控制器进行调试,以确保它能够正确地执行所需的控制任务。
永磁同步电机调速原理
永磁同步电机调速原理以永磁同步电机调速原理为标题,本文将详细介绍永磁同步电机的调速原理及相关知识。
一、永磁同步电机简介永磁同步电机是一种常用于工业领域的高性能电机,具有高效率、高功率因数、高转矩密度等优点。
它的转速与电网频率同步,因此在调速过程中需要采取一些措施。
二、永磁同步电机的调速原理永磁同步电机的调速原理是通过改变电机的磁场以实现转速的调节。
常用的调速方式有矢量控制、直接转矩控制和间接转矩控制等。
1. 矢量控制矢量控制是一种常用的永磁同步电机调速方法,通过控制电机的电流和转子磁场来实现转速的调节。
该方法可以实现精确的转速控制和较大的转矩输出。
2. 直接转矩控制直接转矩控制是一种基于电流矢量的调速方法,通过直接控制电机的转矩来实现转速的调节。
该方法具有响应快、控制精度高的优点,适用于高性能的应用场景。
3. 间接转矩控制间接转矩控制是一种基于电流和转速控制的方法,通过控制电机的电流和转速来实现转速的调节。
该方法可实现较为稳定的转速控制,适用于对转速要求不高的应用场景。
三、永磁同步电机调速系统的组成永磁同步电机调速系统主要由电机、传感器、控制器和驱动器等组成。
1. 电机永磁同步电机是调速系统的核心部件,负责将电能转化为机械能。
2. 传感器传感器用于监测电机的状态参数,如转速、温度和电流等,以便控制器进行相应的调节。
3. 控制器控制器是调速系统的智能核心,根据传感器反馈的信息进行数据处理和控制指令输出,实现电机的精确调节。
4. 驱动器驱动器将控制器输出的调速指令转化为电机能够理解的信号,控制电机的运行状态。
四、永磁同步电机调速的应用领域永磁同步电机调速技术广泛应用于工业生产中的各种场景,如风电、电动汽车、机床、电梯等。
1. 风电永磁同步电机在风电行业中得到了广泛应用,其高效率和稳定性使得风力发电系统更加可靠和经济。
2. 电动汽车永磁同步电机在电动汽车中具有较高的功率密度和能量转换效率,能够满足电动汽车对动力性能和续航里程的要求。
永磁同步电机控制算法

永磁同步电机控制算法
永磁同步电机控制算法是一种高效、精确的电机控制方法,它可以实现电机的高效运转和精确控制。
在现代工业中,永磁同步电机已经成为了一种非常重要的电机类型,广泛应用于各种领域,如机械制造、航空航天、交通运输等。
永磁同步电机的控制算法主要包括矢量控制和直接转矩控制两种。
其中,矢量控制是一种基于电机空间矢量的控制方法,它可以实现电机的高效运转和精确控制。
直接转矩控制则是一种基于电机转矩的控制方法,它可以实现电机的高精度转矩控制。
在永磁同步电机的控制中,矢量控制是一种比较常用的控制方法。
它通过对电机的电流和电压进行控制,实现电机的高效运转和精确控制。
具体来说,矢量控制主要包括两个方面的内容:电流矢量控制和转矩矢量控制。
电流矢量控制是指通过对电机的电流进行控制,实现电机的高效运转和精确控制。
在电流矢量控制中,主要包括两个方面的内容:电流矢量定向和电流矢量调节。
电流矢量定向是指将电机的电流转换为空间矢量,以便进行控制。
电流矢量调节则是指通过对电机的电流进行调节,实现电机的高效运转和精确控制。
转矩矢量控制是指通过对电机的转矩进行控制,实现电机的高精度
转矩控制。
在转矩矢量控制中,主要包括两个方面的内容:转矩矢量定向和转矩矢量调节。
转矩矢量定向是指将电机的转矩转换为空间矢量,以便进行控制。
转矩矢量调节则是指通过对电机的转矩进行调节,实现电机的高精度转矩控制。
永磁同步电机控制算法是一种非常重要的电机控制方法,它可以实现电机的高效运转和精确控制。
在未来的工业发展中,永磁同步电机控制算法将会得到更加广泛的应用和发展。
永磁同步电机闭环调试步骤

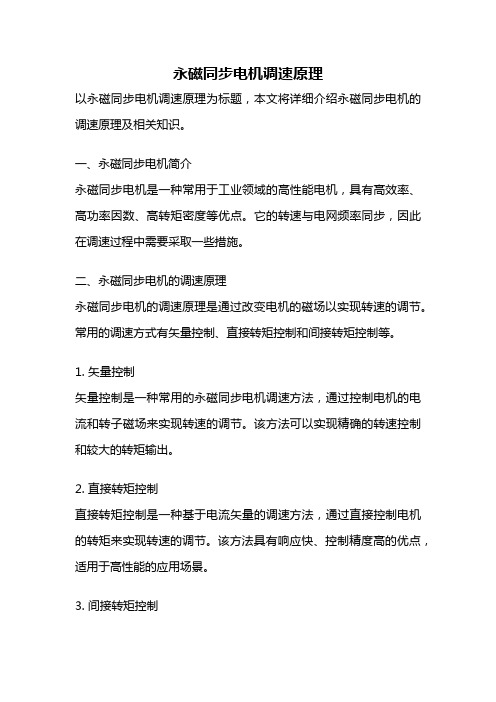
高速运行是否稳定 按RUN电机参数 侦测
是
加载测试
05-00=4按RUN电机 磁极角度学习
断电上电
11-00= 1自动适用调整 00-11=4同步电机闭环控制 01-12,01-13加减速时间设置 调整低速频宽 系统惯量11-01 05-38电机惯量 低速运行是否稳定
负载是否可以 脱离电机轴 检查电机参数 是否设置正确
不可以
可以
05-00=5 SPM電機 參數 05-00=13 IPM電機 參數
台达C2000永磁同步电机闭环调试步骤
中达电通变频器产品处整理
开始 10-00= 编码器的种类 10-01=编码器的线数 10-02=编码器的型式
恢复出厂数值00-02=9
电机参数设置 05-33=1 PM/IM选择 05-34= 电机电流 05-35= 电机功率 05-36= 电机转速 05-37= 电机极数 05-38= 电机惯量 01-00= 最大频率 01-01= 额定频率 01-02=额定电压
永磁同步电动机三种基本调速方法

永磁同步电动机三种基本调速方法
永磁同步电动机是一种常用的高效率电动机,常用于工业生产中的带载设备。
为了实现电动机的调速,常用以下三种基本调速方法: 1. 电压调制法:该方法通过改变电动机的输入电压来实现调速。
可以通过改变变频器的输出电压来改变电动机的输出电压和频率,从而改变电动机的转速。
该方法的优点是控制简单,响应速度快,但是对于负载变化较大的情况下,调速效果可能不稳定。
2. 磁场调制法:该方法通过改变电动机内部的磁场强度来实现调速。
可以通过改变变频器的输出频率和相位,来改变电动机内部的磁场强度分布,从而改变电动机的转速。
该方法的优点是调速范围广,调速效果稳定,但是控制复杂度较高。
3. 直接转矩控制法:该方法通过直接控制电动机的转矩大小来实现调速。
可以通过改变变频器输出的电流大小和相位,来控制电动机的转矩大小,从而改变电动机的转速。
该方法的优点是调速响应速度快,调速效果稳定,但是对于负载变化较大的情况下,需要进行较为复杂的控制设计。
综上所述,不同的永磁同步电动机调速方法各有优缺点,需要根据实际应用情况选择合适的调速策略。
- 1 -。
FOC永磁同步电机驱动调试方法(子瓜子虫)

目录第0章序 (1)第一章简介 (2)第二章软件工具 (2)2.1 IQ Math 库 (2)2.1.1 什么是IQ Math库 (2)2.1.2 Q格式和DMC首选的全局Q (2)2.1.3 IQ Math函数摘要 (2)2.1.4 在C中调用IQ Math函数 (2)2.1.5 电机控制的IQ Math库的好处 (2)2.2 数字电机控制(DMC)库 (2)2.2.1 DMCLib 预览 (2)2.2.2 渐进式系统构建方法 (2)2.2.3 非常好的模块变量定义提供了清楚的调试点 (2)2.2.4 已知工作库简化了开发 (2)2.2.5 2Code Composer Studio and Documentation Completes the Package (2)2.2.6 软件模块 (2)2.2.7 软件模块和控制框图一致 (2)2.2.8 可重用性,兼容性和可扩展性 (2)2.2.9 目标独立的模块和驱动 (2)2.2.10 实用工具/调试模块 (2)2.2.11 快速的模块评估和测试 (2)2.2.12 DMC库文档支持 (2)2.2.12.1 模块层DMC库文档 (2)2.2.13 DMC库优化 (2)2.3 渐进式构建方法 (2)2.3.1 检查系统重要信号----构建层1 (3)●检查中断触发源: (3)●测试一些目标独立模块: (3)●PWMDAC工具测试: (3)●检查PWM输出并验证PWM配置: (3)●逆变器测试 (3)2.3.2 开环电机操作----构建层2 (4)●开环测试: (4)●验证并校准ADC测量并检查ADC配置: (4)●检查Clarke变换和电流波形: (4)2.3.3 电流闭环操作----构建层3 (5)●电流调整器(PID模块)测试和调整: (5)●QEP(Quadrature Encoded Pulses正交编码脉冲)测试: (5)●速度测量模块的测试: (5)●校准角度检测: (5)2.3.4 速度闭环操作----构建层4 (6)●扭矩控制: (6)●速度控制和速度PID调整: (6)●现在,使用实际的转子位置: (6)●软-开关有助于管理控制环路: (6)2.4 PI调节 (7)调节这个控制器 (7)2.4.1第1步 (7)2.4.2 第2步 (7)2.4.3 第3步 (7)2.4.4 第4步 (7)2.4.5 第5步 (7)2.4.6 第6步 (8)2.4.7 第7步 (8)2.4.8 第8步 (8)后继工作 (9)(1)、ST Motor Control Workbench的使用(已完成) (9)(2)、STM32 FOC4.2库的程序框架详解 (9)(3)、基于STM32 FOC4.2库的软件调试过程详解 (9)(4)、基于STM32 FOC4.2库的控制器开发板的原理图设计 (9)(5)、基于STM32 FOC4.2库的控制器开发板的PCB图设计 (9)(6)、基于STM32 FOC4.2库的控制器驱动板的原理图设计 (9)(7)、基于STM32 FOC4.2库的控制器驱动板的PCB设计 (9)(8)、基于STM32 FOC4.2库的电机控制套件的焊接 (9)(9)、基于STM32 FOC4.2库的上述过程的视频教程 (9)(10)、让世界随心而动 (9)第0章序英文文档连接:/index.php/TMS320C2000_Motor_Control_Primer#Known_Working_Library_Eases_the_Develo pment尤其感谢网友的大力支持,献上网友的产品网站:,产品很棒,是我学习的榜样!学习电机驱动几个月了,依然没有入门,各种知识均需要学习,不过还好我没有放弃。
永磁同步电机变频调速控制方法研究
永磁同步电机变频调速控制方法研究第一章前言随着社会的发展,电机控制技术的研究和应用越来越受到关注。
永磁同步电机作为一种新型电机,具有高效、低噪音、小体积、高可靠性等优点,被广泛应用于新能源汽车、电动机车、风力发电以及工业自动控制等领域。
而变频调速控制技术则是电机驱动中的核心技术之一,可以改变电机输出的频率和电压,从而实现精准控制。
本文将着重研究永磁同步电机的变频调速控制方法,分别从控制系统结构、控制算法和实验验证三个方面进行探讨,旨在为永磁同步电机的实际应用提供参考。
第二章控制系统结构永磁同步电机的控制系统框图如下图所示:其中,电机控制器、变频器、传感器和计算机组成了整个控制系统。
电机控制器主要负责控制永磁同步电机的转速和电流,实现闭环控制;变频器则是将直流电源转换成交流电源,并可实现变换频率和电压的功能;而传感器主要用于测量电机的实际速度、位置以及转矩等信号,为电机控制提供反馈信号。
在永磁同步电机的控制系统中,最为关键的部分是电机控制器。
电机控制器可以采用矢量控制算法、直接转矢量控制算法、预测控制算法等不同控制算法进行实现。
其中,矢量控制算法具有控制精度高、响应速度快等优点,被广泛应用于永磁同步电机的控制中。
第三章控制算法3.1 矢量控制算法矢量控制算法是在永磁同步电机坐标系中进行控制的一种算法,其核心思想是将三相电压和电流通过变换矢量的方式,转换成两相电压和电流进行控制,从而实现在任意转速下永磁同步电机的控制。
具体来说,矢量控制算法是将永磁同步电机转换成dq坐标系,通过dq坐标系下的电压矢量和电流矢量,实现对电机的精确控制。
该算法不仅控制精度高,而且稳定性好,已经成为永磁同步电机控制中最为常用的方法。
3.2 直接转矩控制算法直接转矩控制算法又称为直接转矩控制算法,它也是在dq坐标系下进行控制的一种算法。
与矢量控制算法不同的是,直接转矩控制算法不需要进行矢量变换,通过直接控制dq坐标系下的电流,控制永磁同步电机的电磁转矩。
同步电机调试
永磁同步电机调试过程基本调试一、检查PG卡信号1、编码器信号的检查上电,初始化,置E1.02.=4,用手转动电机主轴一圈,检测U2.06.是否有数值变化,U2.16.UVW状态是否准确。
注:需保证H5.06.=0(Z相校正无效),O2.05.=0(U2.06.检测)。
检测不到PG卡信号时请按照相应扩展卡检测说明进行检测。
详细内容请参照《FU-04扩展卡检测》或《FU-08扩展卡检测》2、编码器线数的检查(AB相正交编码器)在编码器线数未知的前提下,将编码器线数设定为2500,用手转动电机主轴至U2.06.=0000后,再转动主轴一圈,读取U2.06.数值a,该编码器线数为a/4。
NO:JSWJ-03-01-07-01二、试运行(必须在电机空载情况下进行)1、设定相应电机参数与编码器参数,E3.12.需设定为“100”。
2、电机磁偏角自学习A3.=3。
自学习前请将参数B2.02.设定为“150”。
3、将B1.01.与B1.02.置“0”。
用操作器给定电机频率运行。
注意事项:1、当电机极数不确定时,可选用V/f控制模式,5Hz运行,计算出电机1分钟内转动的圈数a,即电机极数:2*5Hz*60s/a2、当电机额定转速或额定频率不确定时,可通过下式推算:电机额定转速=电机额定频率*60/电机极对数电机极对数=电机极数/23、当电机额定电压不确定时,可选用闭环控制模式,以80%的额定转速分别正反转,同时调整电机额定电压值,至正转时输出扭矩U1.06.约为5%,反转时输出扭矩U1.06.约为-5%5、当电机处于错相状态下闭环启动时,电流偏大,并极可能产生过流报警。
此时请将参数H5.03.的数值由0修改成1(由1修改成0);或对调驱动器输出电源线UVW的其中两相。
调相后须重新进行电机磁偏角自学习。
6、当电机磁偏角设定错误时,电机起动时后产生跳动,并发生过流报警,请重新进行电机磁偏角自学习。
7、当电机磁偏角不能够确定时,请首先降低最大拖动扭矩E4.10.和制动扭矩E4.11.;以(电机极数/360)为间隔分别设定几个不同的电机磁偏角度H5.07.,直至电机能够旋转为止;对电机磁偏角进行微调,直至电机以额定转速正反转旋转时,驱动器输出电流U1.05.一致并<5%额定电流E3.03.注:永磁同步电机运行正常后卸下UVW电机接线再接上时,必须每根线缆都对应接线。
永磁同步电机调试的总结调试整理
永磁同步电机调试的总结
1.测量电机的相位:U/V/W信号测量:相位差为120度。
测试方法:U/V/W分别外接一个电阻,阻值为10K欧姆。
然后三个电阻连接在一起为地线。
使用示波器的两个表笔,测量两路的信号,然后快速转动电机,则能测量到信号,观察信号的波形,比较出信号差。
测量连接图
2.Z信号位置测量
给编码器加电,编码器能提供Z信号。
使用示波器一路测量U路信号,一路测量Z信号;然后转动电机,观察波形。
同时查看Z脉冲和U路信号的波形,能大概得出他们之间的夹角。
3.测量A,B信号:用示波器采集A,B信号,得出相对的反转
和正转。
4.小角度转动:(Z信号一定得连接上,初始位置判断,可以
不用。
)
Angle角度为定置(电角度/360 + 0.48)*2*PI, 然后给定
Ud = 0; Uq = 0.3;电机正向转动;给负Uq = -0.3;电机反向转动。
Uq增加,速度增加。
5.在第四步的基础上,放开速度环,测量电机的转速。
测量
的转速和用示波器测量的A向的脉冲个数,分别计算转速,
得出的转速应该是一样的。
6.完全放开速度环,速度环得到的IQ_GIVEN值,直接给Uq
值,然后修改速度调节值,速度可以调试。
7.然后直接将电流环,也放开,则转动异常。
8.修改g_IQ_Given = 0.1;然后再进行测试,转速正常;
9.将电流环全部打开,分析坐标变换,没有发现问题,修改
了电流环的PI调节参数,PK = 0.05; KI=0.0002,然后速度可调。
需要进行进一步测试。
A变频器调试永磁同步电机参数设置
ABB 变频器调试永磁同步电机参数设置一、参数设定参数名称设定值说明99.01语言英语现在无中文版99.02电机种类目前不支持电机分类。
99.03电机类别目前不支持电机分类。
电机分类: 0 = AM:异步电机。
三相交流感应电机。
99.04 1 = PMSM: 永磁电机。
三相交流同步电机,带有永磁转子和正弦反电动势电压。
选择电机控制模式。
0 =DTC : 直接力矩控制模式适用于大多数应用场合。
99.05 1 = SCALAR: 标量控制模式适用于不能使用直接转矩控制模式的特殊场合。
在标量控制模式下,变频器99.06电机额定电流99.07电机额定电压99.08电机额定频率99.09电机额定转速99.10电机额定功率99.11功率因数 cos ?99.12电机额定转矩电机辨识运行1:NORMAL :常规辨识运行。
2:REDUCED :简化辨识运99.13行。
3:STANDSTILL:静止辨识运行。
4:AUTOPHASING带编码器自学习。
16.04恢复应用程序原始设置,即参数的工厂缺省值。
0 = DONE :恢复已经完成。
1 = RESTORE DEFS:所有的参数值恢复成缺省值,电机参数、辨识运行结果、现场总线和编码器配置数据除外。
2 = CLEAR ALL:所有的参数值恢复成缺省值,包括电机参数、辨识运行结果、现场总线和编码器配1铭牌数值铭牌数值铭牌数值铭牌数值铭牌数值铭牌数值不适用于永磁电机铭牌数值空载可不设置117.01监视环17.0217.031.021.031.041.0620.0120.0220.0520.0625.0325.0428.0228.0340.02二、故障记录三、日期与时间四、控制环五、标记给定六、传送信息故障显示E:变频器故障。
联系供应商F:变频器停车A:变频器不停监视环监视环实际转速变频器输出频率电机电流电机转矩最高转速范围:0...30000 rpm最低转速范围:-30000...0 rpm 最大电机电流范围:0...30000 A变频器的最大转矩限值范围:0...1600%加速时间2减速时间2比例增益(Kp)学习前设0,学习后设0.8积分时间学习前设0.5,学习后设 1.5载波频率16 kHz。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Ls .iα − n.φr . cos(θ r ) = ∫ (vα − RS .iα )dt Ls .iβ − n.φr .sin (θ r ) = ∫ (vβ − RS .iβ )dt
iMotion Training / IR Confidential
电流检测接口
• 检流电阻大小和放大电路增益确定电流调节器工作范 围 • 确认逆变器容量与电机相配
2009-9-28
iMotion Training / IR Confidential
Clark 变换: 3φ ó 2φ
正向Clark变换
1 φα 2 φ = . β 3 0 Simplified : φα φ = β 2009-9-28 −1 2 3 2 − 1 φ u 2 . φ v − 3 φ 2 w
整个磁场随转子转动而转动
2009-9-28 iMotion Training / IR Confidential
交流电机磁场: 定子
•定子磁场由线圈x和y中的电流产生. •气隙磁通由线圈x和y的磁通合成.
is = (ix , i y ) ( spatial vector)
•如果线圈x和y中的电流是正弦且正交,则产生的磁动势mmf和磁通将按此电流的频率旋转. ix = Is.cos(wt) •三相绕组电机情同此理. iy = Is.cos(wt-p/2)
2009-9-28
MCE
2009-9-28
iMotion Training / IR Confidential
电流检测与转子角度反馈
• 定子绕组上的反电势是 转子角度的函数 • 定子电流反电势和施加 电压的函数 ⇒ 转子角度可以从定子电 流估算 ⇒ 1. 电压和电流等效变换 为两相 ⇒ 2. 通过积分计算磁通 ⇒ 角度计算导出转子磁通α 和β轴分量,分别是转子 角度的正弦和余弦函数.
T = P ⋅ φa ⋅ iq + (Ld − Lq )⋅ id ⋅ iq = P ⋅ φa ⋅ I a ⋅ cos β + k ⋅ I a ⋅
2
[
]
∂L ∂θ
磁阻转矩
磁场不变 磁场随角度变化
2009-9-28
iMotion Training / IR Confidential
IPM电机提高转矩/安培数
2009-9-28
vu iu Three Phase Inverter vv iv vw iw
d α vα = RS .iα + LS . di φr . cos(θ r )) dt + dt (− n.
Rs Rs
Ls Ls
eu ev
Rs
Ls
ew
vβ = RS .iβ + LS . ∴
diβ dt
d (− n.φr . sin (θ r )) + dt
iMotion Training / IR Confidential
2009-9-28
弱磁概念
• Vd和Vq的矢量和受限于母线电 压
– 最大无负载转速时反电势达 到母线电压限制时的速度 – 额定速度是比能提供额定转 矩的速度还小一点的速度
•
弱磁时d轴注入电流减弱电机 磁通减小绕组感应电压
– 转矩常数Kt减小是因为磁通 减小
开环交流电机控制
• V/Hz 控制
• 施加电压固定比例于频率
– 磁通固定 – 电流不可控 – 速度随负载变化时转矩不可控
V = j.ω.φ
i1
i2
2009-9-28
iMotion Training / IR Confidential
闭环交流电机控制
• 控制所加电压以输出期望的电流(转矩)
• 矢量控制/磁场定向控制
2009-9-28
iMotion Training / IR Confidential
交流电机中的转矩
Tx = ∫ Bx (θ ).nx (θ ).ix .dθ Tx = N x .I x .φx . cos(δ )
0
2.π
§当定子磁动势与转子相互作用----呈正交位置,转矩最大. §当负载角(d)>90o ,正交的定子分量在产生转矩外还会 产生直轴分量抵消转子磁场,也就是弱磁 §转矩是转子磁通和定子电流的函数.
e
j
V
Vw Rotor angle ( ) I
Iu Iv Iw Measured Stator AC currents
e
-j
3 -2 I
•控制原理在旋转坐标系中实现 •在稳定状态,电压和电流为常数 •解耦为磁场分量和转矩分量的电流控制
2009-9-28 iMotion Training / IR Confidential
w
slip
u
r
v
2009-9-28
iMotion Training / IR Confidential
交流电机磁场: 参考坐标系
q
r
d
固定坐标系: •站在定子上观察磁通. •旋转的转子磁通是交变的 •定子磁通,电压和电流都是交流量.
旋转坐标系: •站在旋转的转子上观察磁通. •转子磁通是直流量 •定子磁通也是直流量 •通常将三相定子线圈等效变换为两相.
2009-9-28
iMotion Training / IR Confidential
交流同步电机
§转子速度同步于定子电压 §通直流电的线圈的转子或嵌入有永磁体的 转子 §旋转的气隙磁场同步于转子角度 §定子以转子的频率产生电压(反电动势) §定子施加的电压和电流需要和转子频率同 步 •在并入电网(固定频率)之前产生的 电压和频率必须和电源接近 •在调速系统中,你需要转子位置信息 来执行控制
完整的调速系统
• •
速度调节器速度给定和速度反馈计算出转矩要求. 永磁同步电机调速系统需要转子位置和速度信息
– 工业上用旋转变压器或编码器 – 家电上要求无传感器控制
•
通过调整 Id实现额定转速以上运行
– 额定速度以上,母线电压不能克服反电势电压
iMotion Training / IR Confidential
•对于直流电机所有的控制变量 都是线性的!
p
= Lf.if
2009-9-28
iMotion Training / IR Confidential
交流电机绕组
Quadrature Axis - Q
•典型的交流电机绕组由分布的线圈组成,在气隙中产生正弦的磁动势mmf(由安匝数决定). •实际的绕组由于受线圈数的限制,所以实际的磁动势是一个正弦的基波加上谐波! •气隙磁通也呈正弦分布. •产生电压的磁通函数(N.f)沿直轴方向(D) •产生转矩的磁动势mmf函数(N.i)沿交轴方向(Q).
•
总电流受限于电机热设计, 所以d轴上有电流时,电流Iq 要小一些
– 可输出转矩减小
2009-9-28
iMotion Training / IR Confidential
弱磁
2009-9-28
iMotion Training / IR Confidential
Kx
内嵌磁钢电机(IPM)
表贴磁钢 内嵌磁钢
iMotion 设计培训 永磁同步电机控制算法实现与 调试 Tuning
梁国柱 IR应用中心
2009-9-28 iMotion Training / IR Confidential
培训内容
• 磁场定向控制理论(FOC) • • • • 磁场定向控制算法实现 控制参数调试 低速转矩补偿 功率因数校正
反向Clark变换
φu 1 φ = − 1 v 2 −1 φw 2 0 3 φα . 2 φβ − 3 2
φu φv − φ w 3
iMotion Training / IR Confidential
• 将定子交流电流分解为转矩电流和磁场电流 • 对两个分量分别进行控制以输出期望的转矩
2009-9-28 iMotion Training / IR Confidential
交流电机FOC控制
Rotating reference frame Stator voltages Id* Id Id controller Vd Vq Torque Iq* demand Iq Iq Controller Id Iq Rotating reference frame Stator currents V Applied Stator AC voltages Vu SPACE VECTOR PWM -3 Vv
Torque
Main Torque Net Torque
IPM电机最大转 矩控制
Reluctance Torque
转 矩
IPM 电机弱磁区
-90
-60
-30
0
30
60
90
SPM电机常 规控制
速度
IPM Torque function :
1 2 T = P Φ a Ia cos β + (Lq − Ld )Ia ⋅ sin 2β 2 n
Park 变换: ejθ 矢量旋转
旋转坐标系到固定坐标系
φα cos(θ ) − sin(θ ) φd . φ = β sin(θ ) cos(θ ) φq
2009-9-28
iMotion Training / IR Confidential
2009-9-28
iMotion Training / IR Confidential
永磁同步电机FOC控制
• 基于转子角度的矢量变换将定子电流分解为准直流的分量: