机械手码垛机操作指南
码垛机操作规程(3篇)
第1篇一、概述码垛机是自动化生产线中重要的组成部分,主要用于对产品进行堆垛、包装和输送。
为了确保操作人员的人身安全及设备正常运行,特制定本操作规程。
二、操作前准备1. 操作人员应熟悉码垛机的结构、性能、操作方法及安全注意事项。
2. 检查码垛机各部件是否完好,如有损坏或异常,应及时上报维修。
3. 检查电源是否正常,确保电源线无破损、老化现象。
4. 检查设备润滑情况,如发现润滑不良,应及时添加润滑油。
5. 检查码垛机周围环境,确保无障碍物,地面平整。
三、操作步骤1. 启动设备(1)打开电源开关,启动码垛机。
(2)根据生产需求,调整码垛机速度。
2. 加载产品(1)将产品放置在码垛机上,确保产品平稳放置。
(2)调整码垛机夹具,使产品固定。
3. 码垛(1)启动码垛机,使产品按照预定顺序堆垛。
(2)观察码垛过程,确保产品堆垛整齐。
4. 输送(1)码垛完成后,将产品输送至下一工位。
(2)检查输送过程,确保产品平稳输送。
5. 停机(1)停止输送,使产品停留在指定位置。
(2)关闭码垛机,切断电源。
四、注意事项1. 操作过程中,严禁触摸旋转部件,以免发生安全事故。
2. 操作人员应穿戴合适的防护用品,如手套、眼镜等。
3. 操作过程中,严禁无关人员靠近码垛机。
4. 发现异常情况,应立即停止操作,并及时上报维修。
5. 定期检查码垛机各部件,确保设备正常运行。
五、维护保养1. 每班次操作结束后,清理码垛机周围环境。
2. 每周检查设备润滑情况,及时添加润滑油。
3. 每月检查设备紧固件,确保设备紧固可靠。
4. 每季度对码垛机进行一次全面检查,发现问题及时处理。
六、附则1. 本规程适用于所有码垛机操作人员。
2. 操作人员应严格遵守本规程,确保安全生产。
3. 本规程由设备管理部门负责解释和修订。
4. 本规程自发布之日起实施。
第2篇一、概述码垛机是一种自动化设备,广泛应用于物流、食品、饮料、化工等行业,用于实现物料的自动码垛。
为确保码垛机安全、高效地运行,特制定本操作规程。
码垛机手操器操作说明

码垛机手操器操作说明一、手动操作1、控制柜送电前确认选择开关在“手动”位置;2、控制柜送电,3、电机保护断路器合闸,伺服控制器显示“三”;4、确认控制柜触摸屏显示无报警;5、按住手操器“手动”按钮2秒,确认手操器屏幕手动按钮对应处变为黑点;6、按住手操器“伺服”按钮2秒,确认手操器屏幕伺服按钮对应处变为黑点;7、此时伺服控制器显示“8”,说明伺服已经给上使能;8、通过“X+”,“X—”等8个键即可移动机器人。
注意:只有在“回零”后才能操作二、限位开关位置调整1、确认现场机器人抓取位置继码垛位位置;2、设置控制柜触摸屏:工作参数设定--码垛方式;3、腰转限位开关位置:机器人在取袋位向码垛位反方向移动一点即会接触到此限位开关;4、升降及水平限位位置开关:工作范围之内无机械干涉;5、手腕限位位置开关:限位位置开关午安安装在手腕电机连接丝杠的正下方(俯视电机为表盘6点钟方向),当逆时针码垛时,手抓安装版上有限位触发螺丝在1点或2点方位,保证可以顺时针转90吨,逆时针转80渡,顺时针码垛时,限位触发丝应在10点或11点方向。
三、回零操作1、控制柜送电前,确认选择开关在手动位置;2、控制柜送电后确认系统无报警,确认手操器不在手动操作状态;3、确认已经在触摸屏上设置过“码垛方式”;4‘将选择开关打至自动位置,此时伺服会给上使能;5、触摸屏会自动切换至“回零”画面(无回零字时,检查手操器)6、按住回零字样2秒,机器人就进入低速回零过程。
先升降寻零点(机器人手臂上升,寻找到升降下限位开关后下降一点停止)然后其他三轴同时寻找零点(机器人后仰并码垛放方向旋转,,同时手腕顺时针旋转,接触相应的限位开关后反方向移动一点停止);7、寻找零点结束后,触摸屏返回至自动运行画面。
注意:如发现寻零过程与5中描述不一致,许立即按急停按钮,查找原因。
四、示教1、机器人回零(参照回零操作);2、回零完成后,将选择开关打至手动位;3、触屏依次操作“主画面”、“垛型调整”、“示教数据块”后,弹出输入密码窗口,输入“17799”,点击数字键盘上回车按钮后,按住确认按钮3秒,画面自动切换至手操器控制锁定画面;4、去手操器操作,上电后手操器默人画面如下:5、依次点击“手动”、“伺服”按钮(同手动操作);6、按住“后页”按钮2秒;7、按住“—”键后,画面中显示0层0步;8、通过“X+”,“X-”等8个键移动机器人,将机器人移动到抓袋位;9、按住“示教”按钮2秒,确认手操器屏幕示教按钮对应处变为黑点(只需按依次,直到其它点示教完成,重新上电前,不需要再次按动此按钮);10、确认机器人在抓到位后,点击“数据写入”按钮,如果此位置写入成功,屏幕右下角会显示文字“数据写入”,如下图,到此为止,一个点的示教过程结束;11、通过“》”,“《”移动光标,通过“+”,“-”改变层数与袋数;(数值变化后屏幕右下“数据写入”这几个字会消失,表示可以手动移动机器人到当前新选好的点,然后再按下“数据写入”键),每次改变数值后,并且移动机器人到相应的位置后都要按一次“数据写入”;12、共需要示教一个“抓取位”,“两层卸袋位’(0层0步,1层1步,1层2步,1层3步,1层4步,1层5步;2层1步,2层2步,2层3步,2层4步,2层5步);+13、备用位置示教:0层0步---0层8步示教位置同偶数层最后一步;1层6步---1层9步示教位置同偶数层最后一步;2层6步---2层9步示教位置同偶数层最后一步;0层9步示教位置为码垛机安全位置,高度高于满垛位置。
机器人码垛机操作规范
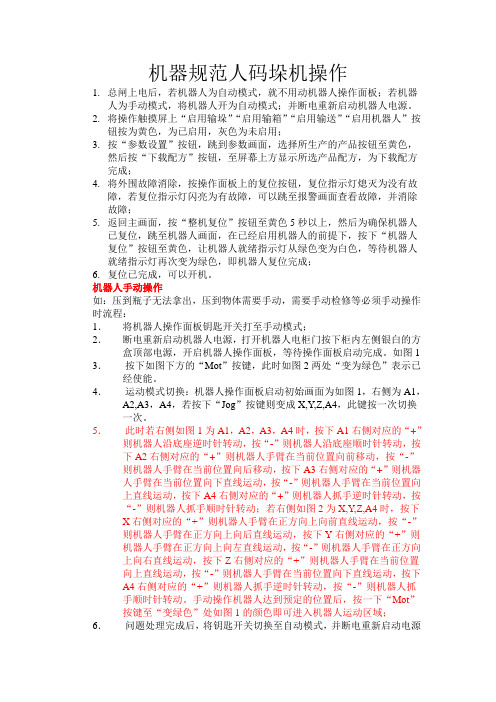
机器规范人码垛机操作1.总闸上电后,若机器人为自动模式,就不用动机器人操作面板;若机器人为手动模式,将机器人开为自动模式;并断电重新启动机器人电源。
2.将操作触摸屏上“启用输垛”“启用输箱”“启用输送”“启用机器人”按钮按为黄色,为已启用,灰色为未启用;3.按“参数设置”按钮,跳到参数画面,选择所生产的产品按钮至黄色,然后按“下载配方”按钮,至屏幕上方显示所选产品配方,为下载配方完成;4.将外围故障消除,按操作面板上的复位按钮,复位指示灯熄灭为没有故障,若复位指示灯闪亮为有故障,可以跳至报警画面查看故障,并消除故障;5.返回主画面,按“整机复位”按钮至黄色5秒以上,然后为确保机器人已复位,跳至机器人画面,在已经启用机器人的前提下,按下“机器人复位”按钮至黄色,让机器人就绪指示灯从绿色变为白色,等待机器人就绪指示灯再次变为绿色,即机器人复位完成;6.复位已完成,可以开机。
机器人手动操作如:压到瓶子无法拿出,压到物体需要手动,需要手动检修等必须手动操作时流程:1.将机器人操作面板钥匙开关打至手动模式;2.断电重新启动机器人电源,打开机器人电柜门按下柜内左侧银白的方盒顶部电源,开启机器人操作面板,等待操作面板启动完成。
如图1 3.按下如图下方的“Mot”按键,此时如图2两处“变为绿色”表示已经使能。
4.运动模式切换:机器人操作面板启动初始画面为如图1,右侧为A1,A2,A3,A4,若按下“Jog”按键则变成X,Y,Z,A4,此键按一次切换一次。
5.此时若右侧如图1为A1,A2,A3,A4时,按下A1右侧对应的“+”则机器人沿底座逆时针转动,按“-”则机器人沿底座顺时针转动,按下A2右侧对应的“+”则机器人手臂在当前位置向前移动,按“-”则机器人手臂在当前位置向后移动,按下A3右侧对应的“+”则机器人手臂在当前位置向下直线运动,按“-”则机器人手臂在当前位置向上直线运动,按下A4右侧对应的“+”则机器人抓手逆时针转动,按“-”则机器人抓手顺时针转动;若右侧如图2为X,Y,Z,A4时,按下X右侧对应的“+”则机器人手臂在正方向上向前直线运动,按“-”则机器人手臂在正方向上向后直线运动,按下Y右侧对应的“+”则机器人手臂在正方向上向左直线运动,按“-”则机器人手臂在正方向上向右直线运动,按下Z右侧对应的“+”则机器人手臂在当前位置向上直线运动,按“-”则机器人手臂在当前位置向下直线运动,按下A4右侧对应的“+”则机器人抓手逆时针转动,按“-”则机器人抓手顺时针转动。
码垛机械手使用说明
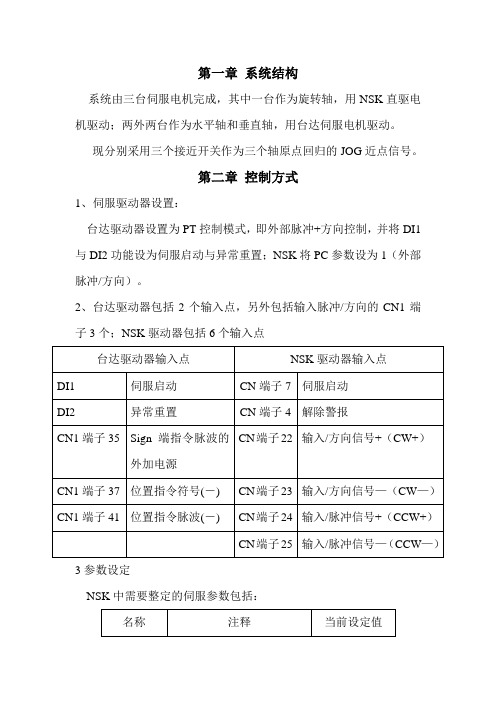
第一章系统结构系统由三台伺服电机完成,其中一台作为旋转轴,用NSK直驱电机驱动;两外两台作为水平轴和垂直轴,用台达伺服电机驱动。
现分别采用三个接近开关作为三个轴原点回归的JOG近点信号。
第二章控制方式1、伺服驱动器设置:台达驱动器设置为PT控制模式,即外部脉冲+方向控制,并将DI1与DI2功能设为伺服启动与异常重置;NSK将PC参数设为1(外部脉冲/方向)。
2、台达驱动器包括2个输入点,另外包括输入脉冲/方向的CN1端子3个;NSK驱动器包括6个输入点台达驱动器输入点NSK驱动器输入点DI1 伺服启动CN端子7伺服启动DI2 异常重置CN端子4解除警报CN端子22输入/方向信号+(CW+)CN1端子35 Sign 端指令脉波的外加电源CN1端子37 位置指令符号(-) CN端子23输入/方向信号—(CW—)CN1端子41 位置指令脉波(-) CN端子24输入/脉冲信号+(CCW+)CN端子25输入/脉冲信号—(CCW—)3参数设定NSK中需要整定的伺服参数包括:名称注释当前设定值LO 负载惯量0.019VG 速度比例增益 2.2PG 位置比例增益0.002SG 伺服增益0FP 第一低通滤波频率200FS 第二低通滤波频率200 注:详细参数参照参数一览表。
注:参数整定流程见操作手册第5章注:LO的设定一般采用自动整定AT—OK完成,详见简明操作手册。
第三章PLC I/O点分配1、输入:X11 Z轴JOG信号X12 Y轴JOG信号X16 X轴JOG信号2、输出:Y0 Z轴高速脉冲Y10Y轴伺服启动Y1 Z轴方向Y11Y轴异常重置Y4 Y轴高速脉冲Y14X轴伺服启动Y5 Y轴方向Y15X轴异常重置Y6 X轴高速脉冲Y20Z轴伺服启动Y7 X轴方向Y21Z轴异常重置Y26 吸真空Y27吹气第四章接线1、台达接线脉冲接线(外部电源1)DI1与DI2接线(外部电源1)2、NSK 接线方法:注:参见简明操作手册第五章组态设置反应时间慢,调整方法:1.变量类型设置准确,只读、只写、读写设置准确;2.只写属性的采集频率应设置为0;3.PLC内部的中间寄存器,要按从小到大的顺序依次设置。
码垛机操作规程
码垛机操作规程一、引言码垛机是一种自动化设备,广泛应用于物流仓储、生产线等领域。
为了确保码垛机的安全运行和高效工作,制定一套操作规程是必要的。
本文将详细介绍码垛机的操作规程,包括操作前的准备工作、操作流程、异常处理等内容。
二、操作前的准备工作1. 确认设备状态:检查码垛机的各个部件是否完好无损,确认设备处于正常工作状态。
2. 确认物料准备:核对物料清单,确保所需物料齐全,并将其放置在指定位置。
3. 安全防护措施:佩戴好个人防护装备,如安全帽、手套等,确保操作人员的人身安全。
三、操作流程1. 启动设备:按照设备启动流程,将码垛机启动,并进行自检。
2. 设置参数:根据物料的尺寸、重量等信息,设置合适的参数,确保码垛机能够正确识别和处理物料。
3. 载入物料:将待处理的物料放置在码垛机的进料口,并按照设备要求进行定位。
4. 开始操作:按下启动按钮,码垛机开始进行自动化操作。
操作人员应保持警惕,随时观察设备的运行状况。
5. 监控操作:在操作过程中,操作人员应时刻关注设备的运行状态,确保操作顺利进行。
如发现异常情况,应及时停止设备并进行处理。
6. 完成操作:当码垛机完成任务后,操作人员应及时停止设备,并核对码垛结果是否符合要求。
7. 清理工作区:清理掉残留物料和垃圾,保持工作区的整洁。
四、异常处理1. 设备故障:如果码垛机出现故障,操作人员应立即停止设备,并联系维修人员进行维修。
2. 物料异常:如果物料出现异常,如尺寸不符、重量超标等情况,操作人员应及时停止设备,并与相关部门进行沟通解决。
3. 安全事故:如果发生安全事故,操作人员应立即停止设备,并采取相应的应急措施,保护现场和人员安全。
五、操作注意事项1. 操作人员应熟悉码垛机的工作原理和操作流程,严禁未经培训的人员擅自操作设备。
2. 操作人员应经常检查设备的运行状态和各个部件的工作情况,确保设备正常运行。
3. 在操作过程中,操作人员应保持专注,切勿分神或随意操作。
码垛智能机械臂操作规程

码垛智能机械臂操作规程码垛智能机械臂是一种用于物品堆叠的自动化设备,能够根据预设的程序进行高效的堆垛作业。
为了保证机械臂的安全运行和有效操作,制定一份详细的操作规程是非常重要的。
下面是关于码垛智能机械臂操作规程的详细说明。
一、安全准备1. 机械臂操作之前,必须确保所有的安全装置和保护设备正常运行,并经定期检验合格。
2. 操作人员必须穿着符合要求的工作服和安全鞋,并佩戴好安全帽、手套等个人防护装备。
3. 操作前必须对机械臂进行全面检查,并确认其各项参数设置符合操作要求。
二、操作流程1. 启动(1) 确保机械臂电源已经接通,并按照规程操作开关机。
(2) 启动控制系统,对机械臂进行初始化操作。
2. 编程设置(1) 打开机械臂程序编辑软件,新建一个作业文件。
(2) 根据物品的尺寸、重量等要求,设置合适的堆叠模式和路径规划。
(3) 编写码垛程序,并进行校验和调试。
(4) 将程序上传到机械臂控制系统中,确保程序加载完成并准备就绪。
3. 作业操作(1) 配置好作业区域,确保没有障碍物和其他人员进入。
(2) 手动将待堆垛的物品放置在指定位置,确保物品堆放正确。
(3) 在操作界面中选择相应的程序,点击开始执行。
(4) 控制机械臂按照设定的路径进行码垛操作。
(5) 在作业期间,操作人员必须密切关注机械臂的运行状态,随时准备采取紧急措施。
4. 完成作业(1) 机械臂完成码垛操作后,停止程序的执行。
(2) 检查码垛结果是否符合要求,确认无误后进行下一步操作。
(3) 关闭机械臂的电源,并彻底清理作业区域。
(4) 对机械臂进行必要的维护和保养,确保其长期稳定运行。
三、安全措施1. 操作人员必须经过专业培训,并持有相关证书。
2. 在启动机械臂之前,必须确保周围的环境安全,防止发生意外伤害。
3. 遵守操作规程,严禁随意更改程序和参数设置。
4. 在作业期间,操作人员必须保持警觉,并随时准备采取应急措施。
5. 严禁在机械臂运行过程中触摸机械臂、传感器或其他运动组件。
码垛机操作规程 (2)
码垛机操作规程一、引言码垛机是一种自动化设备,用于将货物按照规定的方式堆放在托盘或者货架上。
为了确保码垛机的安全运行和高效工作,制定了本操作规程,以指导操作人员正确操作码垛机。
二、适合范围本操作规程适合于所有使用码垛机进行货物堆放的场所和操作人员。
三、术语定义1. 码垛机:指用于自动堆放货物的机器设备。
2. 托盘:指用于装载货物并方便搬运的平台。
四、操作准备1. 检查码垛机:操作人员在使用码垛机之前,应子细检查设备是否正常运行,包括电源、传感器、机械臂等部件。
2. 准备货物:将待堆放的货物按照规定进行分类并摆放在指定位置,确保货物整齐、无杂乱。
3. 准备托盘:检查托盘的结构是否完好,无损坏或者变形。
五、操作流程1. 启动码垛机:按照设备说明书操作,确保码垛机处于正常工作状态。
2. 设置堆放参数:根据货物的尺寸、分量和堆放要求,设置码垛机的堆放参数,包括堆放高度、层数和堆放方式等。
3. 定位货物:使用码垛机的传感器进行货物的定位,确保机械臂准确抓取货物。
4. 抓取货物:码垛机根据设定的堆放参数,使用机械臂准确抓取货物,并将其放置在托盘上。
5. 堆叠货物:根据设定的堆放参数和堆放方式,码垛机将货物按照规定的层数和高度进行堆叠。
6. 完成堆放:当码垛机完成堆放任务后,操作人员应检查堆放的货物是否坚固、整齐,并确保没有超出托盘的边界。
7. 关闭码垛机:在确认堆放任务完成后,操作人员应按照设备说明书操作,将码垛机关闭。
六、安全注意事项1. 操作人员应熟悉码垛机的工作原理和操作方法,严禁未经培训的人员擅自操作码垛机。
2. 操作人员应戴上安全帽和防护手套,确保人身安全。
3. 在操作过程中,禁止将手或者其他身体部位挨近码垛机的运动部件,以免发生意外伤害。
4. 当码垛机浮现异常情况时,如异常声音、异味等,操作人员应即将住手操作,并联系维修人员进行检修。
5. 操作人员应定期对码垛机进行维护保养,确保设备的正常运行。
自动码垛机操作说明书

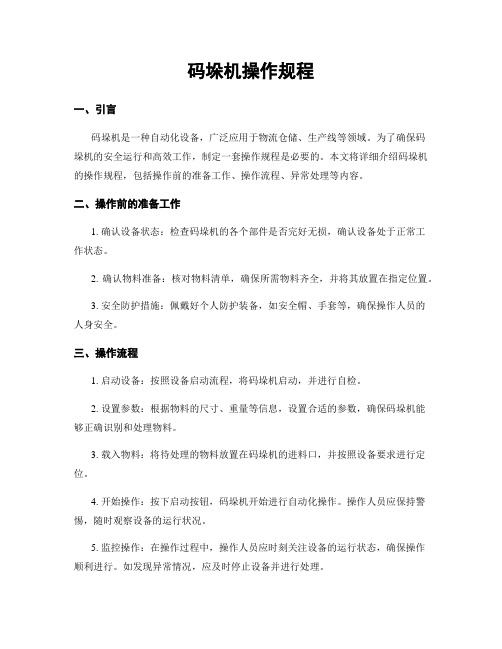
图 2.1.4.8
15
杭州青菱自动化技术有限公司
上图 2.1.4.8 为基础数据界面,如果厂家以某一个料框的各 类尺寸为基准,在进行“料架检测”完成之后,可以点选“料架数据 导入”,将此料架扫描所得的参数作为与其它料架对比的标准参数。
本手册提供了码垛机标准操作方法的尽可能详细的信息。但不可能 把所有需避免的可能操作、条件或情况都完全地描述出来。所以,在
2
杭州青菱自动化技术有限公司
操作中碰到任何未描述的问题或情况时,请联络杭州青菱自动化技术 有限公司。请参阅本手册最后一页上的联系信息。
3
目录
杭州青菱自动化技术有限公司
一,安全须知..............................................................................................5 1.1,总纲............................................................................................ 5 1.2 注意细则....................................................................................... 5
1.2 注意细则
1.2.1 在码垛机操作运行中或者等待中,决不可进入码垛机的运动范 围,特别是料叉在垂直方向运动时,禁止任何人员在料叉下方走动, 以免遭受高空意外坠物的伤害。
1.2.2 操作人员在手动或自动运行码垛机的时候,需确认无闲杂人员 穿梭于码垛机附近。码垛机遥控器需由指定人员操作,无关人员禁止
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
96/97线机器人码垛机
操作指导书
开机前准备首先检查压缩空气压力不得低于6公斤
1)输送链主电源上电将链条主电柜上的旋钮旋至ON等待机器进入系统画面
2)机械手上电将机械手主电柜旋钮旋至ON 处等待示教器进入系统(示教器会显示一组对话框需点击
关闭方可以进入系统)
3)产品选择根据生产需要选自产品规格型号点击产品选择画面→进入选择产品如下图
4)启动输送链如图
将转换钥匙旋至(运行)手动自动开关旋至(自动) 按
(复位)电源按钮(上电)(复位)按(自动启动)按钮(数秒后传送链条自动启动)】】
5)启动机械抓手(机械抓手回原点)开启时如发现机械抓手不在原点位置需要给机械抓手找原点(将机械手主电柜钥匙旋至自动状态→点击确认→按电源键上电→点击示教器左上角ABB图标(出现操作主屏幕)
→点击自动生产
→点击示教器左下方点PP移至MAIN→点击确认→点击右
下
角设置齿轮图标选择速度设置25%→按启动按钮启动机械抓机械抓手将自动回复到原点位置等待抓取。
6)第一次开机如发现栈板上或传动滚筒内有产品时点击主画面选择产品所在线别点击强行抓取强行满栈后机器将自动排出机舱内的栈板和产品。
7)生产过程中机械抓手停留在一线或二线时
不影响继续抓取。
8)单边生产在自动状态下点击控制面板
手动画面→手动强制画面→选择需要停止或开启的线别进
行转换。
9)手动转换将手动自动开关旋至手动状态→点击控制面板手动画面→选择马达或气缸→点击所需要手动操作的马达或气缸→按手动按钮操作
10)故障处理如生产过程中机械手出现故障或码垛错误需要重新码垛时(点击主画面→手动画面→手动强制画面→点击所要停止的线→返回主画面→点击主画面→选择所在线
→强制抓箱→强制满栈机器自动排出栈板上的产品→(在确保96/97线机舱内栈板上无产品时做一次机械手回原点的步骤)返回主画面→点击手动画面→手动强制画面→点击所要恢复运行
的线→恢复生产
11)注意事项在生产过程中严禁点击PP移至MAIN使机械抓手回原点
上海嘉里食品工业有限公司
2011-5-22。